西门子S7-1200+V90PN 通过 FB284控制4个轴 包含KTP700触摸屏程序 调试通过 现场程序
最近在现场完成了一个挺有意思的项目,用西门子S7 - 1200搭配V90PN,通过FB284功能块实现对4个轴的精准控制,还配套了KTP700触摸屏程序,目前整个系统已调试通过,今天就来和大家分享一下其中的要点。
硬件连接与配置
首先是硬件连接,S7 - 1200与V90PN之间通过PROFINET网络连接,这部分的物理连接相对简单,确保网线插好,设备上电。在TIA Portal软件中进行硬件配置,将S7 - 1200和V90PN的设备信息添加进来,注意设置好各自的IP地址,保证在同一网段内,比如S7 - 1200设置为192.168.0.1,V90PN可以依次设置为192.168.0.2 - 192.168.0.5(对应4个轴)。
FB284功能块控制4个轴
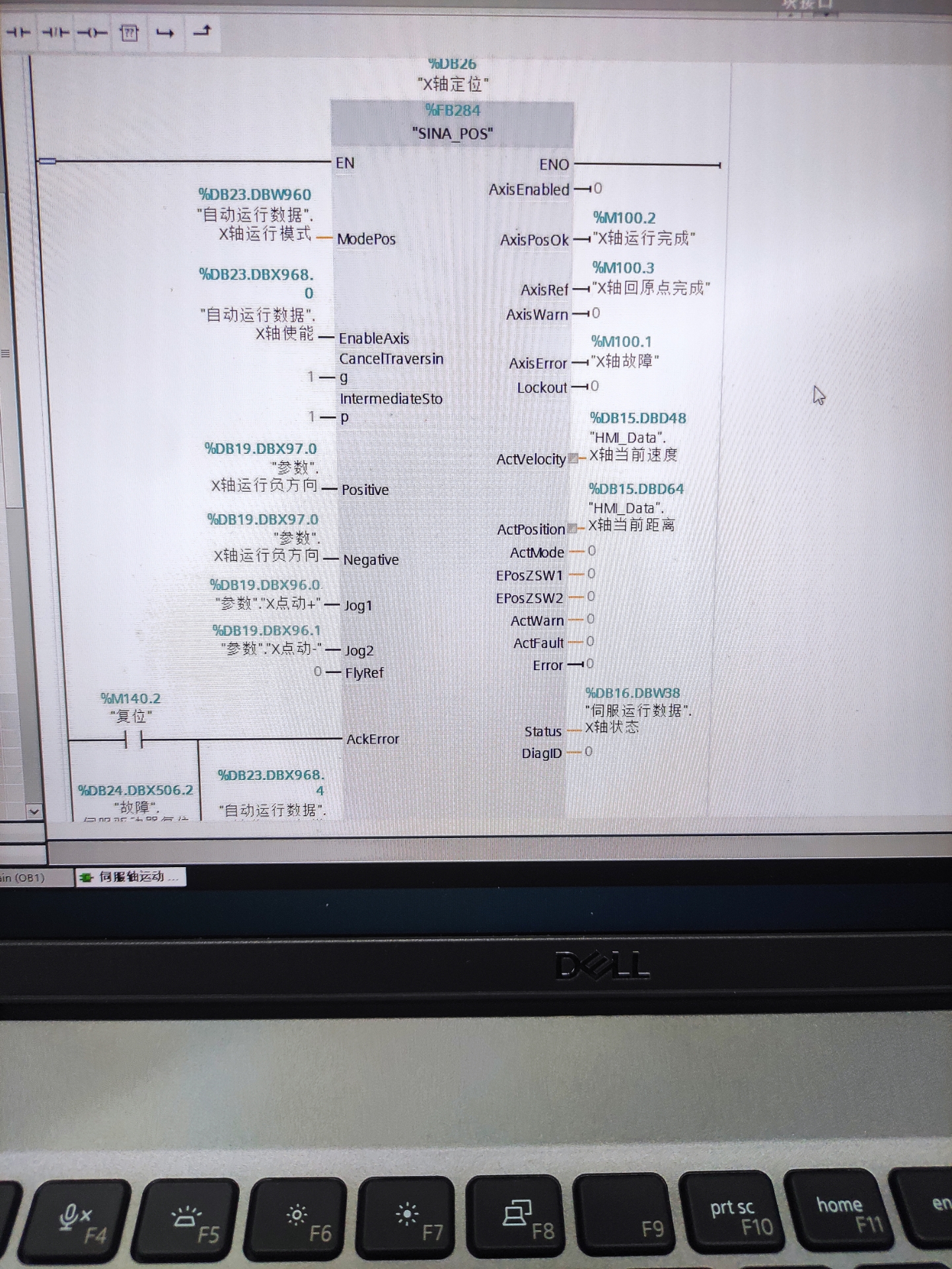
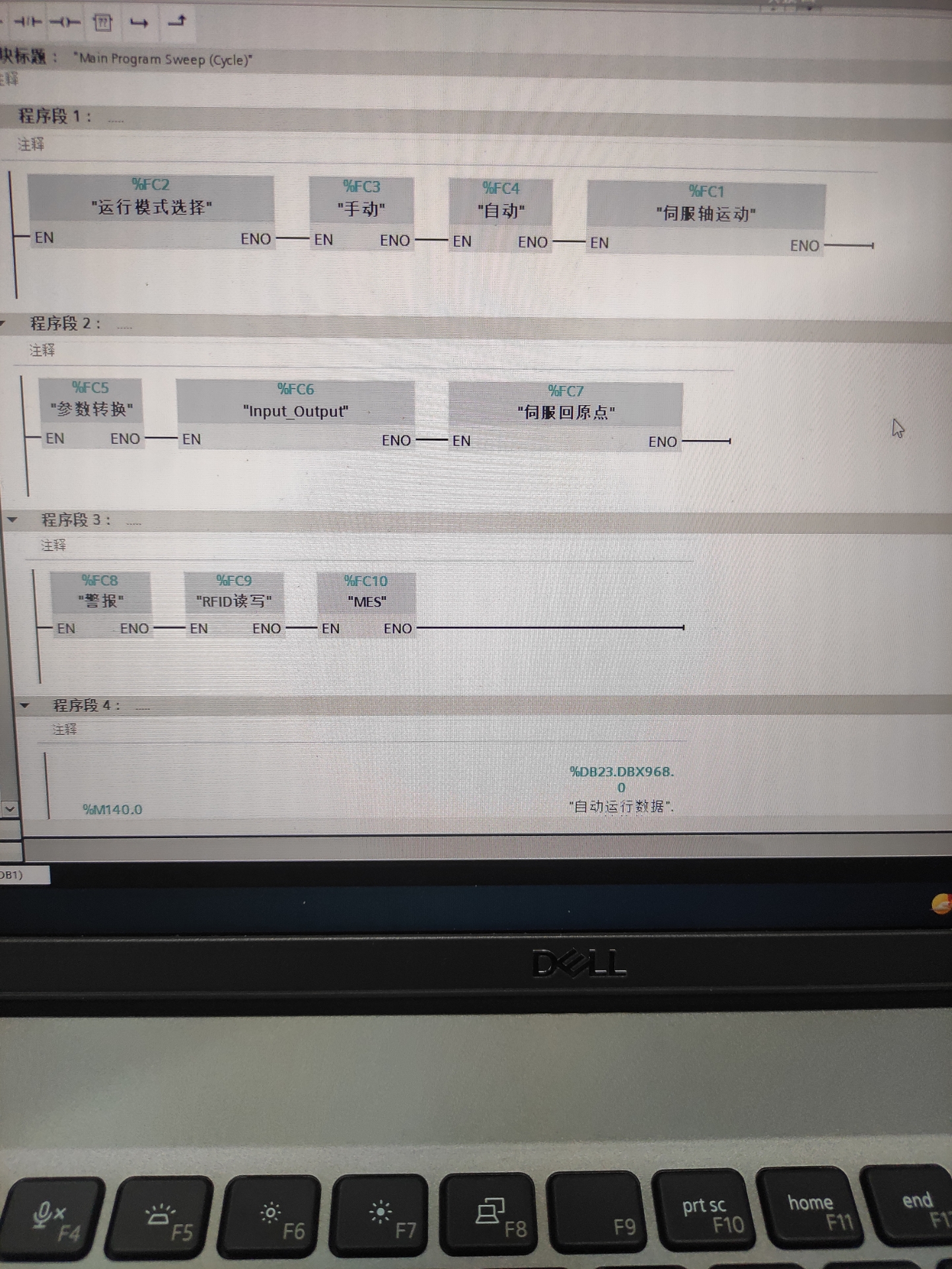
在程序编写中,FB284功能块是核心。下面来看一段简单的代码示例:
text
// 定义FB284的背景数据块
DB10 : "FB284"
{
// 轴1相关参数
"Axis" := "Axis_1";
"Position" := 100.0; // 目标位置100mm
"Velocity" := 50.0; // 速度50mm/s
"OverV" := 100;
"OverAcc" := 100;
"OverDec" := 100;
"CancelTraversing" := FALSE;
"IntermediateStop" := FALSE;
"Jog1" := FALSE;
"Jog2" := FALSE;
"ExecuteMode" := 1; // 相对定位模式
"PositionMode" := 1;
"DynamicResponse" := 1;
"PositiveOverV" := 100;
"NegativeOverV" := 100;
"PositiveOverAcc" := 100;
"NegativeOverAcc" := 100;
"PositiveOverDec" := 100;
"NegativeOverDec" := 100;
"Jog1Velocity" := 20.0;
"Jog2Velocity" := 20.0;
"Rounding" := 0;
}这里以轴1为例,在DB10这个背景数据块中,设置了轴的各种参数。"Axis"指定要控制的轴对象,"Position"设置目标位置,"Velocity"设置运行速度等。"ExecuteMode"设置为1,表示相对定位模式,在这种模式下,轴会从当前位置移动指定的距离。
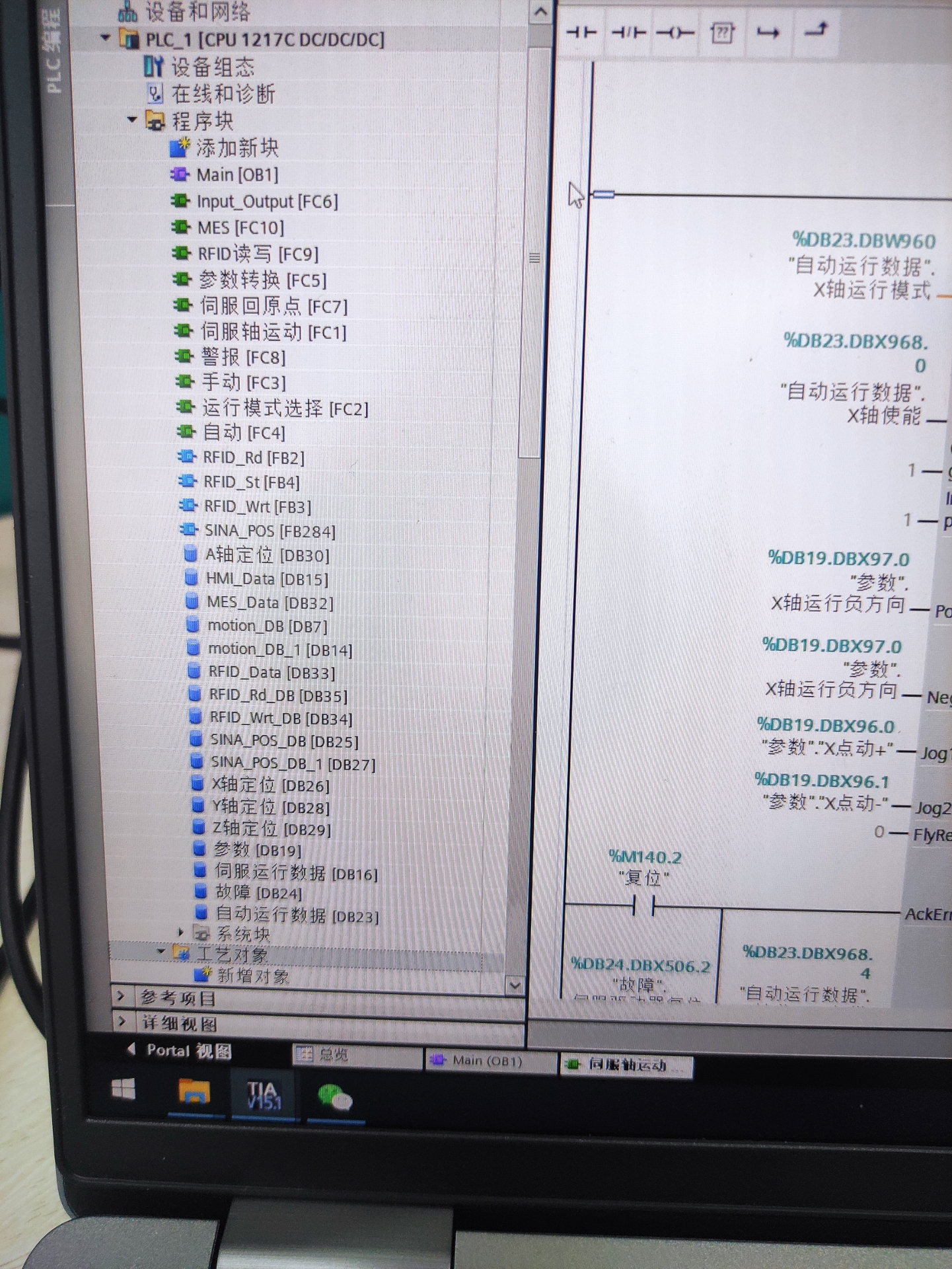
对4个轴的控制,其实就是重复类似的设置过程,只不过每个轴对应的背景数据块不同,比如轴2可以用DB11,轴3用DB12,轴4用DB13。每个背景数据块里的轴参数根据实际需求调整,比如不同轴的目标位置、速度可能不一样。
KTP700触摸屏程序
KTP700触摸屏作为人机交互界面,主要用于监控和操作轴的运行。在TIA Portal中创建HMI项目,与S7 - 1200的PLC项目关联起来。
在触摸屏画面上,我们可以添加按钮、文本框、进度条等元素。以控制轴1的启动按钮为例,在触摸屏上添加一个按钮,设置其按下事件的脚本:
text
HMIRuntime.Tags("Axis1_Start").Write TRUE这里的"Axis1*Start"*是在PLC程序中定义的一个BOOL型变量,用于控制轴1的启动。当在触摸屏上按下这个按钮时,就会向PLC发送信号,将Axis1 Start置为TRUE,从而触发轴1的运行。
西门子S7-1200+V90PN 通过 FB284控制4个轴 包含KTP700触摸屏程序 调试通过 现场程序
同样地,对于显示轴的位置信息,可以添加一个文本框,绑定PLC中轴位置的变量,比如:
text
HMIRuntime.Tags("Axis1_Position").Read Value
TextBox1.Text = Value.ToString("F2")这段脚本从PLC读取轴1的位置变量Axis1_Position,并将其显示在文本框TextBox1中,保留两位小数。
调试过程中的注意点
在调试过程中,遇到过一些小问题。比如一开始轴运行不顺畅,经过检查发现是速度设置过高,超过了机械结构的承受能力。所以在设置速度参数时,一定要结合实际的机械性能来调整。
还有就是网络通信方面,偶尔会出现连接不稳定的情况,这时候需要检查网线是否松动,设备的IP地址是否有冲突。在TIA Portal的在线诊断功能中,可以查看设备的状态,帮助我们快速定位问题。
总之,通过这次项目,对西门子S7 - 1200、V90PN以及KTP700触摸屏的协同工作有了更深入的理解,希望我的经验能给大家在类似项目中提供一些帮助。