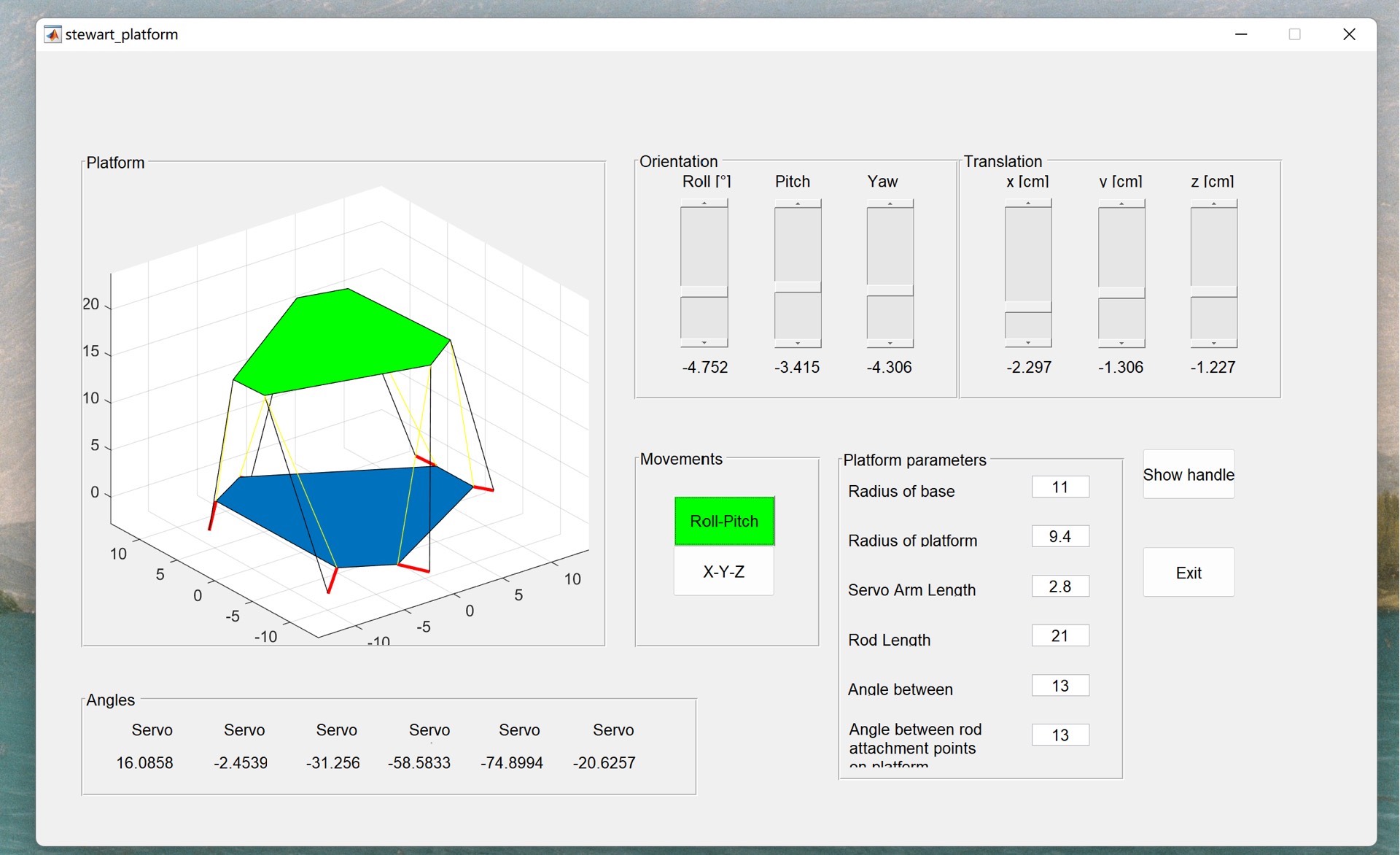
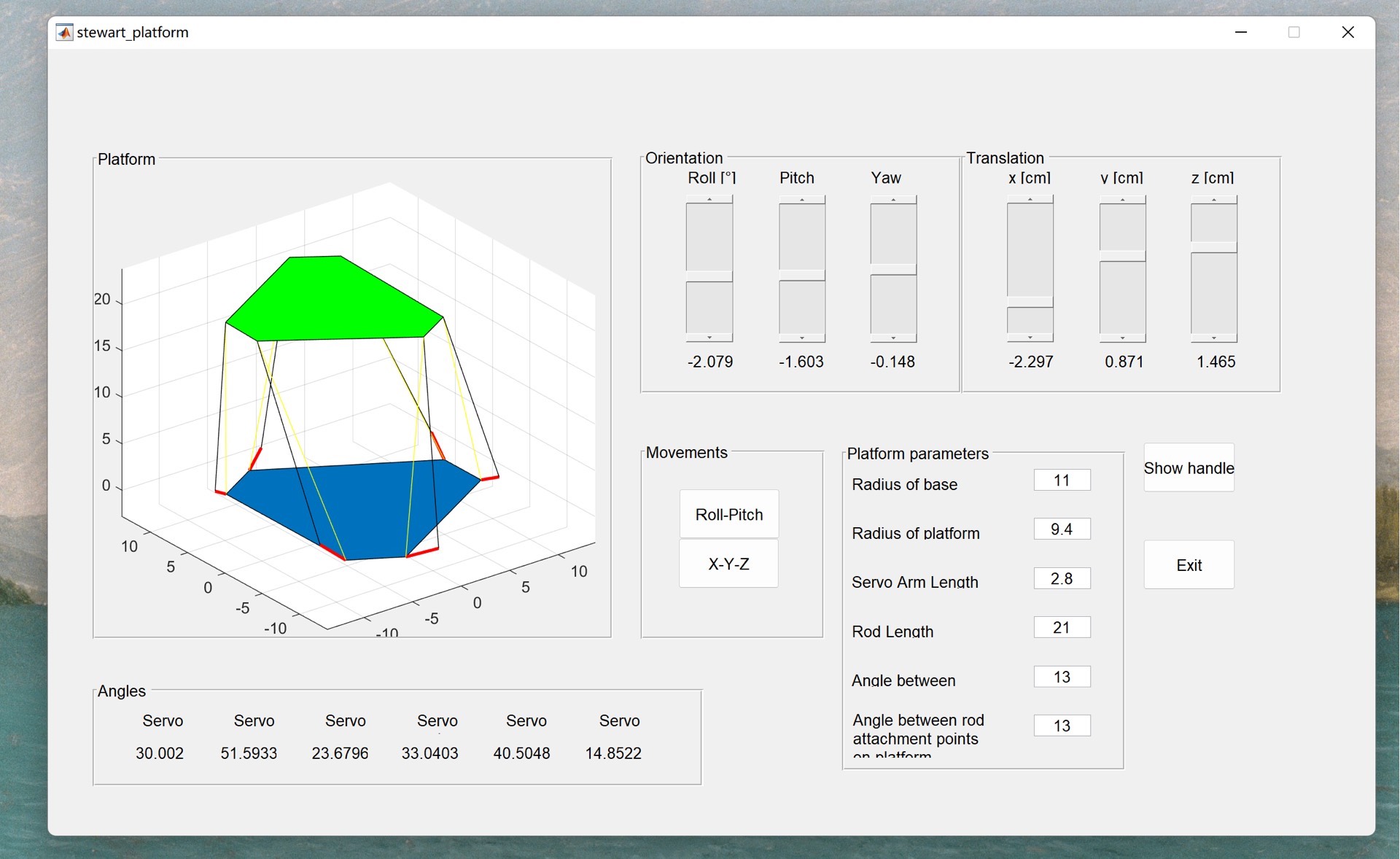
六自由度并联Stewart Platform平台, matlab GUI界面,有动画显示,可更改角度和杆长。 六自由度平台(六自由度平台) 并联机械手
在机器人领域,六自由度并联 Stewart Platform 平台就像一颗璀璨的明珠,散发着独特的魅力。它作为并联机械手的典型代表,有着令人惊叹的应用潜力。今天,咱们就来聊聊基于 Matlab GUI 界面打造的这个平台,还能实现动画显示,随意更改角度和杆长,简直不要太酷炫!
六自由度并联 Stewart Platform 平台简介
六自由度并联 Stewart Platform 平台,由上下两个平台通过六根可伸缩杆连接而成。这六根杆的长度变化可以精确控制上平台在空间中的六个自由度,即沿 x、y、z 轴的平移以及绕 x、y、z 轴的旋转。这种独特的结构赋予了它高精度、高刚度和快速响应的特性,在飞行模拟、汽车驾驶模拟、精密加工等众多领域都有着广泛应用。
Matlab GUI 界面开发
界面设计
首先,咱们得设计一个用户友好的 Matlab GUI 界面。在 Matlab 的 GUIDE 工具中,拖放各种组件来搭建界面。比如,添加编辑框用于输入角度和杆长数值,按钮用于触发动画显示和参数更新,坐标轴用于展示平台的动画。
matlab
% 创建 GUI 主窗口
fig = uifigure('Name', '六自由度 Stewart Platform 界面');
% 创建编辑框用于输入角度
angle_edit = uieditfield(fig, 'numericeditfield',...
'Position', [100 100 80 22],...
'Value', 0);
angle_label = uilabel(fig, 'Text', '输入角度:',...
'Position', [40 100 60 22]);
% 创建编辑框用于输入杆长
length_edit = uieditfield(fig, 'numericeditfield',...
'Position', [100 70 80 22],...
'Value', 1);
length_label = uilabel(fig, 'Text', '输入杆长:',...
'Position', [40 70 60 22]);
% 创建按钮触发动画
animate_button = uibutton(fig, 'pushbutton',...
'Text', '显示动画',...
'Position', [100 40 80 22],...
'ButtonPushedFcn', @(btn,event) animate_platform(angle_edit.Value, length_edit.Value));这里代码很直观,先创建了主窗口,给它起了个名字。接着创建输入角度和杆长的编辑框以及对应的标签,方便用户输入参数。最后创建一个按钮,按钮按下时会调用 animate_platform 函数,这个函数后面会讲到,它用来实现动画显示功能。
动画显示与参数更改
动画显示可是这个项目的一大亮点。要实现平台根据输入的角度和杆长进行动画展示,咱们得通过 Matlab 的绘图函数来构建平台模型,并根据参数变化更新模型。
matlab
function animate_platform(angle, length)
% 初始化平台参数
base_radius = 1;
platform_radius = 0.5;
% 计算上下平台各连接点坐标
base_points = zeros(6, 3);
platform_points = zeros(6, 3);
for i = 1:6
theta = (i - 1) * 2 * pi / 6;
base_points(i, 1) = base_radius * cos(theta);
base_points(i, 2) = base_radius * sin(theta);
platform_points(i, 1) = platform_radius * cos(theta + angle);
platform_points(i, 2) = platform_radius * sin(theta + angle);
platform_points(i, 3) = length;
end
% 清除原有绘图
cla;
% 绘制上下平台
patch('Vertices', [base_points; base_points(1, :)], 'Faces', [1:6; 6 1], 'FaceColor', 'b');
patch('Vertices', [platform_points; platform_points(1, :)], 'Faces', [1:6; 6 1], 'FaceColor', 'r');
% 绘制连接杆
for i = 1:6
line([base_points(i, 1), platform_points(i, 1)], [base_points(i, 2), platform_points(i, 2)], [0, platform_points(i, 3)]);
end
% 设置坐标轴
axis equal;
xlabel('X 轴');
ylabel('Y 轴');
zlabel('Z 轴');
end这段 animate_platform 函数可就复杂一些啦。首先初始化了平台的一些基本参数,像上下平台的半径。然后通过循环计算出上下平台各个连接点的坐标,这里角度参数 angle 就发挥作用了,它会影响上平台连接点的角度位置,而杆长 length 直接决定了上平台连接点在 z 轴的位置。接着清除之前的绘图,重新绘制上下平台和连接杆,最后设置坐标轴,让图形显示更美观。
六自由度并联Stewart Platform平台, matlab GUI界面,有动画显示,可更改角度和杆长。 六自由度平台(六自由度平台) 并联机械手
通过这样的 Matlab GUI 界面设计,我们就能轻松地更改六自由度并联 Stewart Platform 平台的角度和杆长,并实时看到平台的动画显示效果。是不是感觉这个神奇的平台一下子变得触手可及了呢?希望大家也能在这个有趣的项目中探索更多机器人领域的奥秘!