OpenClaw + 智谱 AI (GLM) + 飞书机器人 完整部署指南。
🚀 OpenClaw 智能体部署指南 (Node.js 22+ / 智谱 GLM / 飞书)
本指南将帮助您在本地或服务器上搭建一个基于 智谱 AI (Zhipu GLM) 模型,并通过 飞书 (Feishu/Lark) 进行交互的智能体OpenClaw。
📋 前置准备
-
操作系统: Linux / macOS / Windows (WSL2 推荐)
-
运行环境 : Node.js 22+ (必须)
-
包管理器: npm 或 pnpm (推荐 pnpm)
-
账号准备:
🛠️ 步骤一:安装 OpenClaw
由于 Node.js 版本较新 (v22),建议使用 pnpm 以获得更好的依赖管理体验,当然 npm 也可以。
1. 验证 Node.js 版本
bash
node -v
# 输出应 >= v22.0.02. 安装 OpenClaw CLI
推荐使用全局安装方式:
csharp
# 使用 npm
npm install -g openclaw
# 或者使用 pnpm (推荐)
pnpm add -g openclaw3. 验证安装
css
openclaw --version如果显示版本号,说明安装成功。
🔑 步骤二:注册智谱开放平台 & 获取 Key
为了获得更稳定的 QPS (每秒请求数) 以避免之前的限流错误,请仔细操作此步。选择智谱的原因是注册会送几千万token,适合想尝试玩玩openclaw的用户,不过智谱AI在我体验下来不太好用,资金充足可考虑其它模型。
-
访问官网 : 登录 智谱开放平台。
-
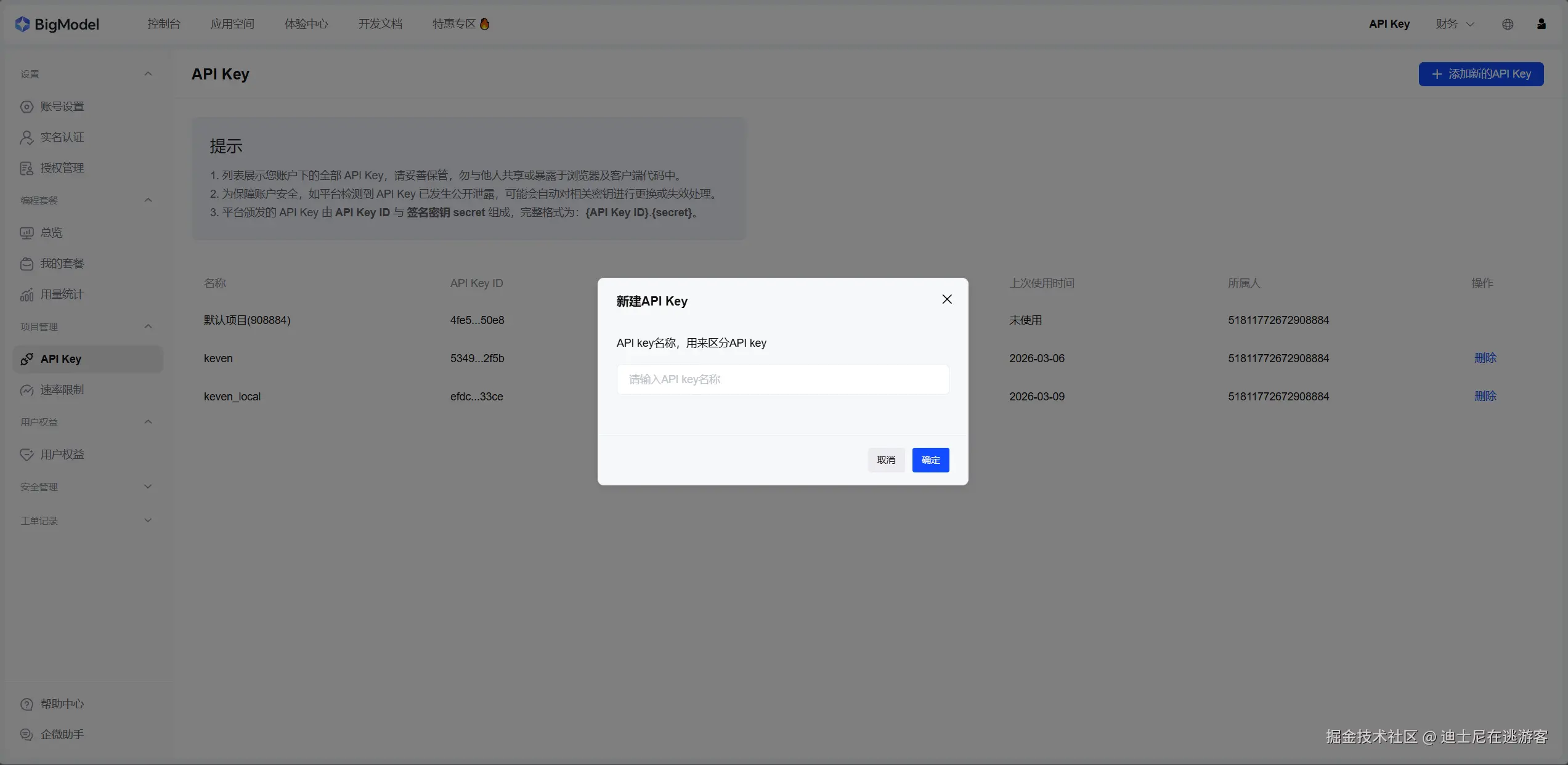
创建 API Key:
- 进入控制台 -> API Key 管理。
- 点击"创建新的 API Key"。
- 重要 : 勾选所需的模型权限 (如
glm-4-air,glm-z1-air等)。 - 复制生成的 Key (格式通常为
xxxxxxxx.xxxxxxxx),妥善保存。
-
查看额度与限流:
- 在控制台查看当前 Key 的 QPS (Queries Per Second) 限制。
- 建议: 如果是免费额度,QPS 通常很低 (如 2-5)。如果是生产环境,建议充值升级以获得更高并发支持。
🤖 步骤三:创建飞书机器人
我们需要在飞书上创建一个应用,以便 OpenClaw 能将消息推送给您。
-
进入飞书开放平台 : 登录 飞书开放平台。
-
创建企业自建应用:
- 点击"控制台" -> "创建企业自建应用"。
- 填写应用名称 (如
OpenClaw-Bot) 和图标。
-
获取凭证:
- 在"凭证与基础信息"页面,记录 App ID 和 App Secret。
-
在本地执行以下命令:
bash
npx -y https://sf3-cn.feishucdn.com/obj/open-platform-opendoc/879b06f872058309ef70f49bcd38a71f_Pr8pNIJ9J9.tgz install提示:👆如果执行这一行命令行出错,可在命令行前 增加sudo 重新执行
-
如果历史已关联飞书应用,可选是沿用历史飞书应用,还是创建或关联新应用。如果是创建或关联新应用,则填入第3步中创建新应用的 appid 和 appsecret
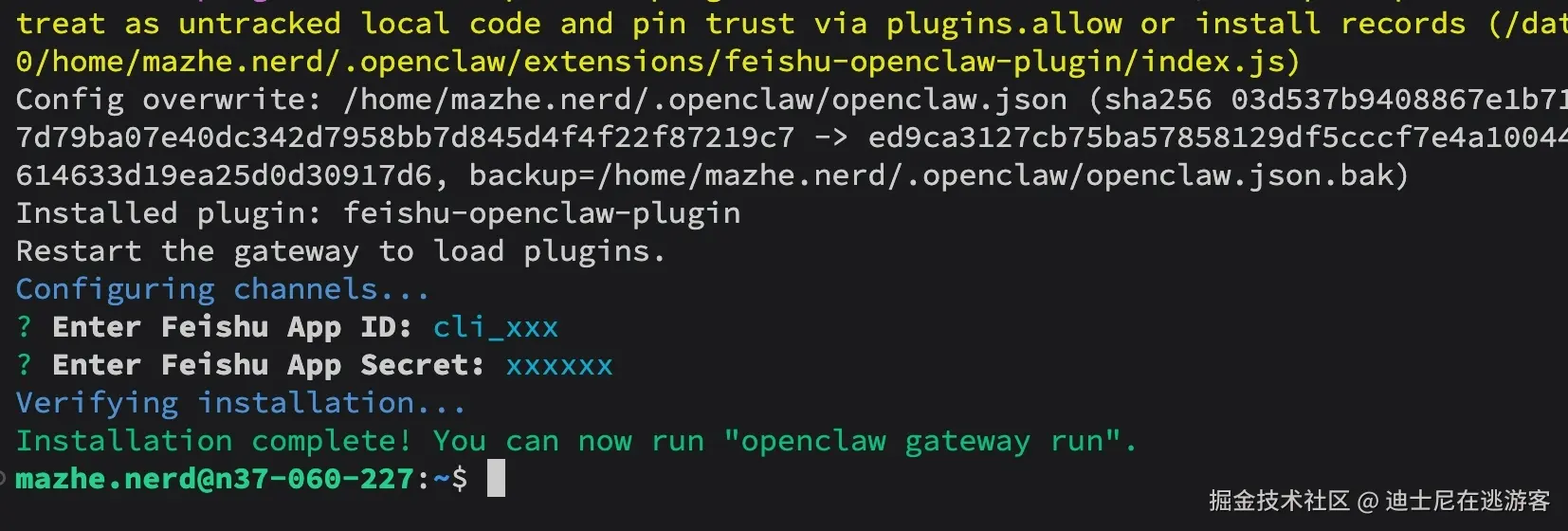
验证是否成功
arduino
openclaw gateway run --allow-unconfigured若出现以下内容则关联成功
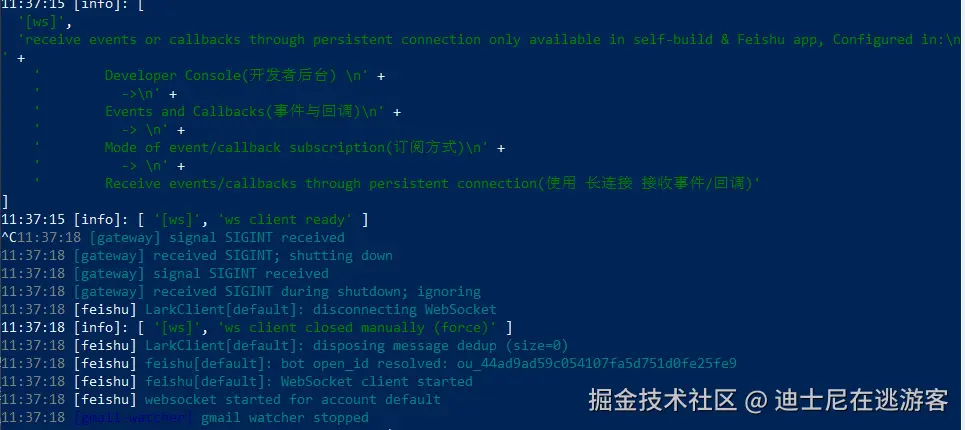
-
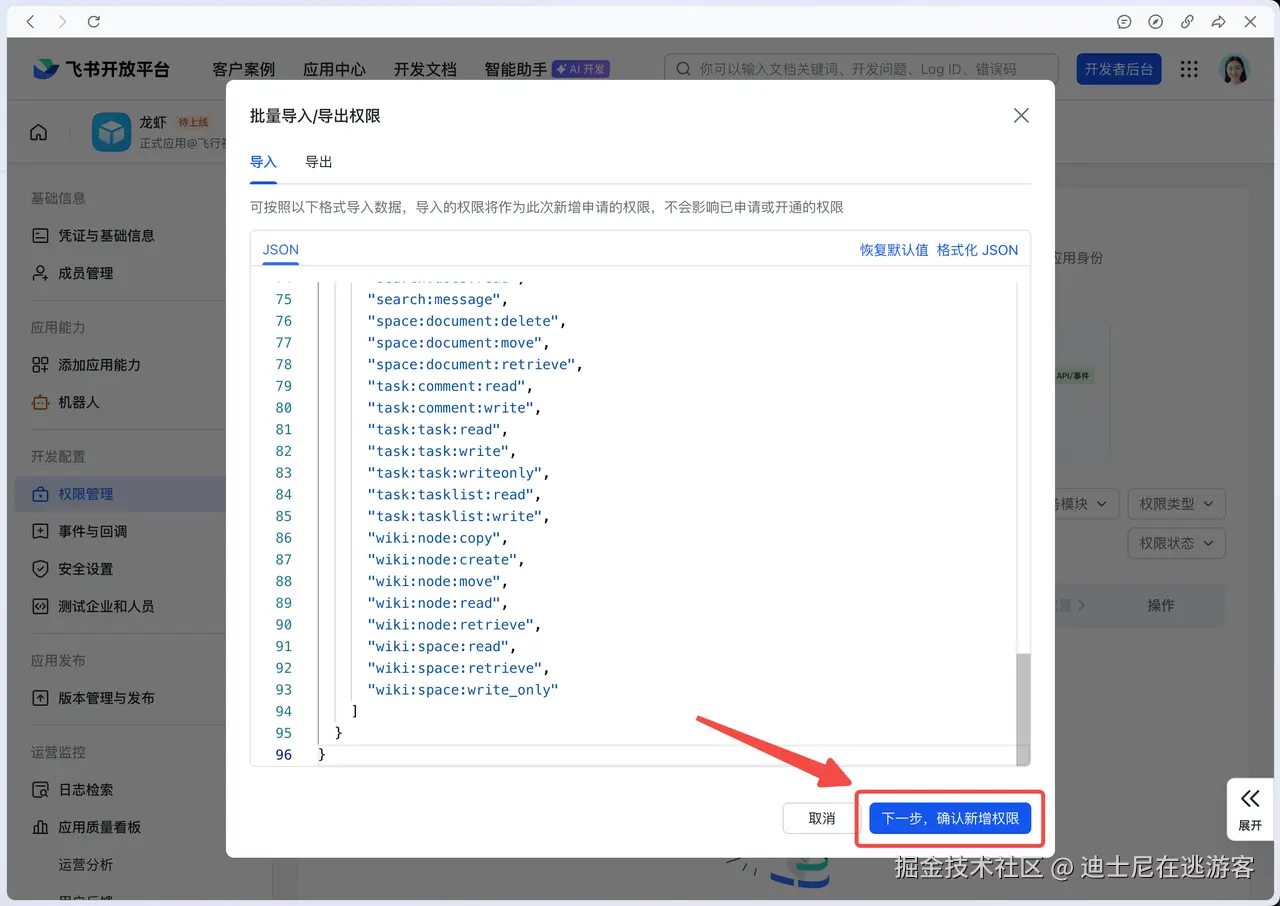
配置权限:
-
进入"权限管理" -> "批量导入"。
-
复制并添加以下关键权限:
-
json
{
"scopes": {
"tenant": [
"contact:contact.base:readonly",
"docx:document:readonly",
"im:chat:read",
"im:chat:update",
"im:message.group_at_msg:readonly",
"im:message.p2p_msg:readonly",
"im:message.pins:read",
"im:message.pins:write_only",
"im:message.reactions:read",
"im:message.reactions:write_only",
"im:message:readonly",
"im:message:recall",
"im:message:send_as_bot",
"im:message:send_multi_users",
"im:message:send_sys_msg",
"im:message:update",
"im:resource",
"application:application:self_manage",
"cardkit:card:write",
"cardkit:card:read"
],
"user": [
"contact:user.employee_id:readonly",
"offline_access","base:app:copy",
"base:field:create",
"base:field:delete",
"base:field:read",
"base:field:update",
"base:record:create",
"base:record:delete",
"base:record:retrieve",
"base:record:update",
"base:table:create",
"base:table:delete",
"base:table:read",
"base:table:update",
"base:view:read",
"base:view:write_only",
"base:app:create",
"base:app:update",
"base:app:read",
"board:whiteboard:node:create",
"board:whiteboard:node:read",
"calendar:calendar:read",
"calendar:calendar.event:create",
"calendar:calendar.event:delete",
"calendar:calendar.event:read",
"calendar:calendar.event:reply",
"calendar:calendar.event:update",
"calendar:calendar.free_busy:read",
"contact:contact.base:readonly",
"contact:user.base:readonly",
"contact:user:search",
"docs:document.comment:create",
"docs:document.comment:read",
"docs:document.comment:update",
"docs:document.media:download",
"docs:document:copy",
"docx:document:create",
"docx:document:readonly",
"docx:document:write_only",
"drive:drive.metadata:readonly",
"drive:file:download",
"drive:file:upload",
"im:chat.members:read",
"im:chat:read",
"im:message",
"im:message.group_msg:get_as_user",
"im:message.p2p_msg:get_as_user",
"im:message:readonly",
"search:docs:read",
"search:message",
"space:document:delete",
"space:document:move",
"space:document:retrieve",
"task:comment:read",
"task:comment:write",
"task:task:read",
"task:task:write",
"task:task:writeonly",
"task:tasklist:read",
"task:tasklist:write",
"wiki:node:copy",
"wiki:node:create",
"wiki:node:move",
"wiki:node:read",
"wiki:node:retrieve",
"wiki:space:read",
"wiki:space:retrieve",
"wiki:space:write_only"
]
}
}
-
配置事件与回调订阅 :
- 使用 长连接 接收事件和回调事件
-
安装应用:
- 在"版本管理与发布"中点击"发布",发布后会进入审核状态,让企业管理员通过后才会正式发布。
- 回到"应用信息",点击"启用状态"确保应用已启用。
- 在飞书群聊中,通过"添加机器人"将刚创建的应用添加到群组聊天中。
⚙️ 步骤四:初始化配置 OpenClaw
这是最关键的一步,我们将整合之前的配置并针对限流问题进行优化。
1. 配置 OpenClaw 的 AI 大模型
运行以下命令:
arduino
openclaw configLocal > Model > 选择你的模型厂商 > Paste API key now > 输入「API key」
2. 运行 OpenClaw Gateway
打开"终端"依次输入以下指令,检查 Gateway 是否正常问答。
openclaw gateway install
sql
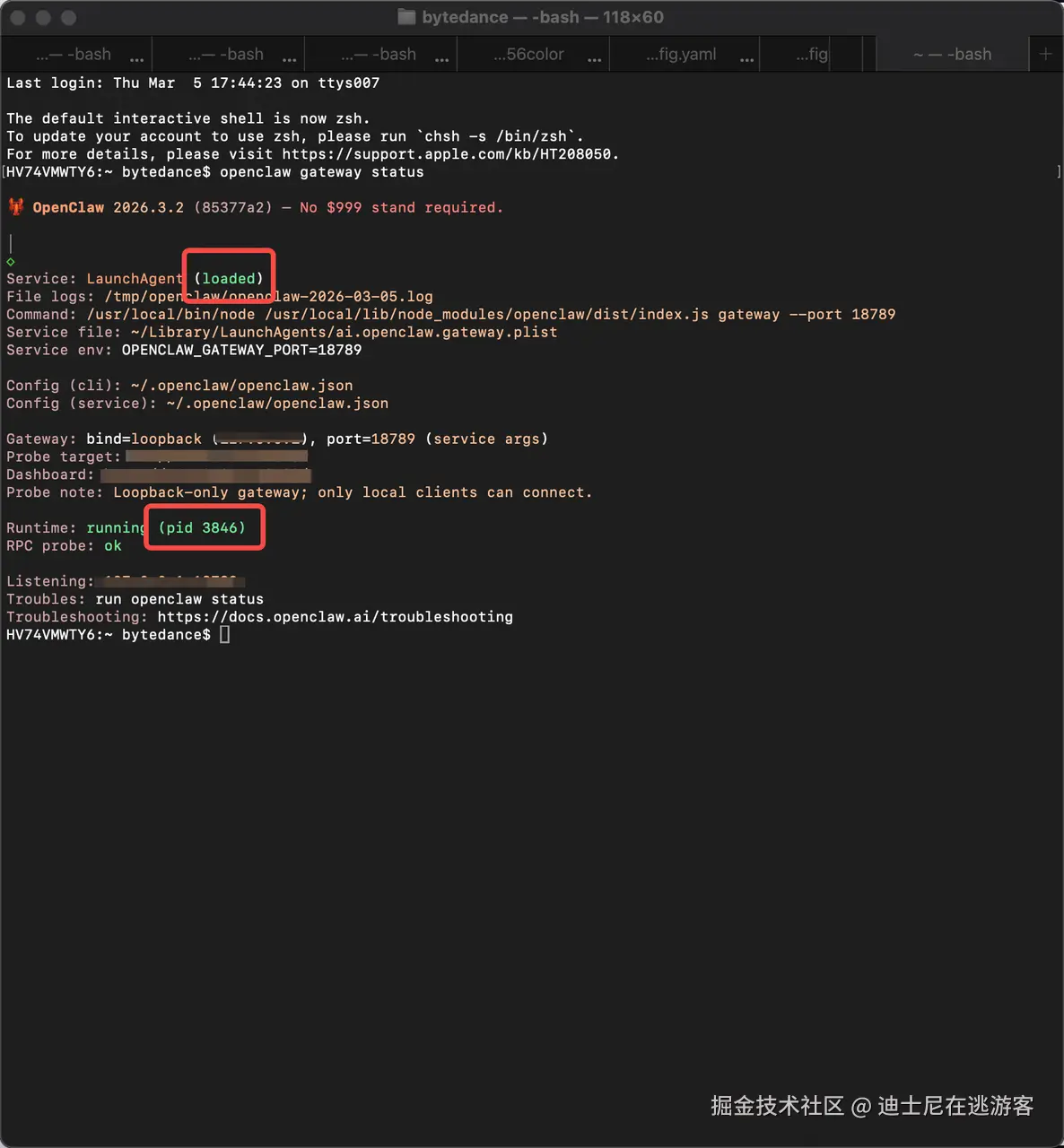
openclaw gateway start
lua
openclaw gateway status出现绿色 "loaded" ,则说明安装成功。
恭喜! 您现在拥有一个稳定运行的 OpenClaw + 智谱 + 飞书智能体系统。如有其他配置需求,可随时调整 openclaw.json 并重启网关。
步骤五:验证飞书机器人能正常回复
1.将发布的机器人拉入一个群聊并@机器人发送以下命令进行授权
bash
/feishu auth2.授权成功后发送以下命令进行整体检查
bash
/feishu doctor若能正常回复则安装成功。
bash
若提示请求超时则进入/.openclaw/openclaw.json文件配置智谱GLM-Z1-Air模型,或者选用其它模型。