
本文涉及:
- ESPIDF的IIC通信示例
- 加速度+陀螺仪计算欧拉角
- 互补滤波融合稳定欧拉角
- 磁力计硬软铁校准
- 磁力计倾斜补偿
- 磁力计 偏航角359~1度跳变
- 磁力计与预测值之间的"最短路径误差"
- IMU:ICM42670P
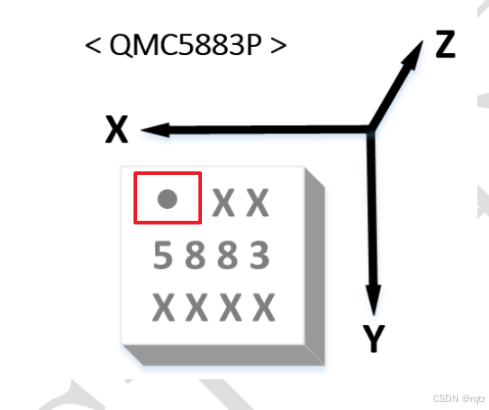
- 磁力计: QMC5883P
ESPIDF旧版IIC通信
官方文档 :https://docs.espressif.com/projects/esp-idf/zh_CN/v5.1/esp32/api-reference/peripherals/i2c.html
官方示例 :esp-idf/examples/peripherals/i2c/i2c_simple/main/i2c_simple_main.c at v5.1 · espressif/esp-idf
头文件: i2c.h遗留 I2C API 的头文件(用于使用旧驱动程序的应用)
代码:D:\ESP_IDF_FILES\ESP32S3\ESP32_01\components\IIC\IIC.c
配置驱动程序(主机) :建立 I2C 通信第一步是配置驱动程序,这需要设置 i2c_config_t 结构中的几个参数
- 设置 I2C 工作模式 - 从
i2c_mode_t中选择主机模式或从机模式 - 指定 SDA 和 SCL 信号使用的 GPIO 管脚
- 是否启用 ESP32 的内部上拉电阻
- 设置 I2C 时钟速度(仅限主机模式)
- 选择频率
配置示例(主机)
c
//配置IIC参数
i2c_config_t conf = {
.mode = I2C_MODE_MASTER, //配置为主机模式
.sda_io_num = I2C_MASTER_GPIO_SDA, // 配置 SDA 的 GPIO,GPIO40
.scl_io_num = I2C_MASTER_GPIO_SCL, // 配置 SCL 的 GPIO,GPIO39
.sda_pullup_en = GPIO_PULLUP_ENABLE,//需要内部上拉,开漏输出,非推挽输出
.scl_pullup_en = GPIO_PULLUP_ENABLE,//需要内部上拉,开漏输出,非推挽输出
.master.clk_speed = I2C_MASTER_FREQ_HZ, //频率为400KHz
};配置IIC端口号 :i2c_port_t i2c_master_port = I2C_NUM_0;
- ESP32S3有两个端口号,分别为
I2C_NUM_0I2C_NUM_1
配置一个 I2C 总线 :调用 i2c_param_config() 函数
配置总线示例(主机)
c
//配置IIC端口号
i2c_port_t i2c_master_port = I2C_MASTER_NUM;
//配置IIC参数
i2c_config_t conf = {
.mode = I2C_MODE_MASTER, //配置为主机模式
.sda_io_num = I2C_MASTER_GPIO_SDA, // 配置 SDA 的 GPIO,GPIO40
.scl_io_num = I2C_MASTER_GPIO_SCL, // 配置 SCL 的 GPIO,GPIO39
.sda_pullup_en = GPIO_PULLUP_ENABLE,//需要内部上拉,开漏输出,非推挽输出
.scl_pullup_en = GPIO_PULLUP_ENABLE,//需要内部上拉,开漏输出,非推挽输出
.master.clk_speed = I2C_MASTER_FREQ_HZ, //频率为400KHz
};
i2c_param_config(i2c_master_port, &conf);//配置一个 I2C 总线,配置给定的配置安装驱动程序 :配置好 I2C 驱动程序后,使用以下参数调用函数 i2c_driver_install() 安装驱动程序
-
端口号,从
i2c_port_t中二选一 -
主机或从机模式,从
i2c_mode_t中选择 -
分配用于在从机模式下发送和接收数据的缓存区大小。I2C 是一个以主机为中心的总线,数据只能根据主机的请求从从机传输到主机。因此,从机通常有一个发送缓存区,供从应用程序写入数据使用。数据保留在发送缓存区中,由主机自行读取(仅限从机模式)
-
用于分配中断的标志
安装示例
c
// 安装一个 I2C 驱动.参数: I2C 端口号,I2C 模式(主控或从),接收缓冲区大小,发送缓冲区大小,用于分配中断的标志
ESP_ERROR_CHECK(i2c_driver_install(i2c_master_port, conf.mode, I2C_MASTER_RX_BUF_DISABLE, I2C_MASTER_TX_BUF_DISABLE, 0));主机模式下通信(主机写入数据)
-
使用
i2c_cmd_link_create()创建一个命令链接-
然后,将一系列待发送给从机的数据填充命令链接:
- 启动位 -
i2c_master_start() - 从机地址 -
i2c_master_write_byte()。提供单字节地址作为调用此函数的实参。 - 数据 - 一个或多个字节的数据作为
i2c_master_write()的实参。 - 停止位 -
i2c_master_stop()
函数
i2c_master_write_byte()和i2c_master_write()都有额外的实参,规定主机是否应确认其有无接受到 ACK 位。 - 启动位 -
-
-
通过调用
i2c_master_cmd_begin()来触发 I2C 控制器执行命令链接。一旦开始执行,就不能再修改命令链接。 -
命令发送后,通过调用
i2c_cmd_link_delete()释放命令链接使用的资源
主机模式下通信(主机读取数据)
- 用
i2c_master_read_byte()和/或i2c_master_read()填充命令链接读取数据
读写示例(参考:https://www.bilibili.com/video/BV1xv4yzHEhM?t=1560.0\&p=20)
c
void bh1750_send_cmd(uint8_t cmd_data)
{
i2c_cmd_handle_t cmd = i2c_cmd_link_create();
i2c_master_start(cmd);
i2c_master_write_byte(cmd, bh1750_write_addr, true);
i2c_master_write_byte(cmd, cmd_data, true);
i2c_master_stop(cmd);
i2c_master_cmd_begin(I2C_NUM_0, cmd, 1000);
i2c_cmd_link_delete(cmd);
}
uint16_t bh1750_read_data(void)
{
uint8_t light_high = 0 ,light_low = 0 ;
i2c_cmd_handle_t cmd = i2c_cmd_link_create();
i2c_master_start(cmd);
i2c_master_write_byte(cmd, bh1750_read_addr, true);
i2c_master_read_byte(cmd, &light_high, I2C_MASTER_ACK);
i2c_master_read_byte(cmd, &light_low, I2C_MASTER_NACK);
i2c_master_stop(cmd);
i2c_master_cmd_begin(I2C_NUM_0, cmd, 1000);
i2c_cmd_link_delete(cmd);
}便捷读写i2c_master_write_to_device()
c
esp_err_t i2c_master_write_to_device(i2c_port_t i2c_num, uint8_t device_address, const uint8_t *write_buffer, size_t write_size, TickType_t ticks_to_wait)对连接到特定 I2C 端口的设备执行写入作。该函数是 i2c_master_start()、i2c_master_write()、i2c_master_read() 等的封装器,它只能在 I2C 主模式下调用。
参数
- i2c_num -- 用于传输的 I2C 端口号
- device_address -- I2C 设备的 7 位地址
- write_buffer -- 总线发送的字节数
- write_size -- 写缓冲区的大小(字节单位)
- ticks_to_wait -- 暂停前等待的最大计时数。
返回值
- ESP_OK 成功
- ESP_ERR_INVALID_ARG 参数误差
- ESP_FAIL 发送命令错误,从属服务器没有确认传输。
- ESP_ERR_INVALID_STATE I2C 驱动未安装或未进入主控模式
- ESP_ERR_TIMEOUT 由于公交车忙碌,作暂停
示例
c
static esp_err_t mpu9250_register_read(uint8_t reg_addr, uint8_t *data, size_t len)
{
return i2c_master_write_read_device(I2C_MASTER_NUM, MPU9250_SENSOR_ADDR, ®_addr, 1, data, len, I2C_MASTER_TIMEOUT_MS / portTICK_PERIOD_MS);
}
static esp_err_t mpu9250_register_write_byte(uint8_t reg_addr, uint8_t data)
{
int ret;
uint8_t write_buf[2] = {reg_addr, data};
ret = i2c_master_write_to_device(I2C_MASTER_NUM, MPU9250_SENSOR_ADDR, write_buf, sizeof(write_buf), I2C_MASTER_TIMEOUT_MS / portTICK_PERIOD_MS);
return ret;
}ESPIDF新版IIC通信
官方文档 :https://docs.espressif.com/projects/esp-idf/zh_CN/latest/esp32s3/api-reference/peripherals/i2c.html
本地代码:D:\ESP_IDF_FILES\ESP32S3\ESP32_01\components\IIC_MASTER\IIC_MASTER.c
头文件: i2c_master.h提供标准通信模式下特定 API 的头文件(用于使用主机模式的新驱动程序的应用)
IIC总线句柄和设备句柄
c
i2c_master_bus_handle_t bus_handle = NULL;//总线
i2c_master_dev_handle_t dev_handle = NULL;//设备安装 I2C 主机总线和设备
I2C 主机总线是基于总线-设备模型设计的,因此需要分别使用 i2c_master_bus_config_t 和 i2c_device_config_t 来分配 I2C 主机总线实例和 I2C 设备实例
I2C 主机总线 需要 i2c_master_bus_config_t 指定的配置:
i2c_master_bus_config_t::i2c_port设置控制器使用的 I2C 端口。i2c_master_bus_config_t::sda_io_num设置串行数据总线 (SDA) 的 GPIO 编号。i2c_master_bus_config_t::scl_io_num设置串行时钟总线 (SCL) 的 GPIO 编号。i2c_master_bus_config_t::clk_source选择 I2C 总线的时钟源。可用时钟列表见i2c_clock_source_t。i2c_master_bus_config_t::glitch_ignore_cnt设置主机总线的毛刺周期。如果线上的毛刺周期小于设置的值(通常设为 7),则可以被滤除。i2c_master_bus_config_t::intr_priority设置中断的优先级。如果设置为0,则驱动程序将使用低或中优先级的中断(优先级可设为 1、2 或 3 中的一个),若未设置,则将使用i2c_master_bus_config_t::intr_priority指示的优先级。请使用数字形式(1、2、3),不要用位掩码形式((1<<1)、(1<<2)、(1<<3))。i2c_master_bus_config_t::trans_queue_depth设置内部传输队列的深度,但仅在异步传输中有效。i2c_master_bus_config_t::enable_internal_pullup启用内部上拉电阻。注意:该设置无法在高速频率下拉高总线,此时建议使用合适的外部上拉电阻。
I2C 主机设备 需要 i2c_device_config_t 指定的配置:
i2c_device_config_t::dev_addr_length配置从机设备的地址位长度,可从枚举I2C_ADDR_BIT_LEN_7或I2C_ADDR_BIT_LEN_10(如果支持)中进行选择。i2c_device_config_t::device_address设置 I2C 设备原始地址,请直接将设备地址解析到此成员。例如,若设备地址为 0x28,则将 0x28 解析到i2c_device_config_t::device_address,不要带写入或读取位。i2c_device_config_t::scl_speed_hz设置此设备的 SCL 线频率。i2c_device_config_t::scl_wait_us设置 SCL 等待时间(以微秒为单位)。通常此值较大,因为从机延伸时间会很长(甚至可能延伸到 12 ms)。设置为0表示使用默认的寄存器值。
分配和初始化 I2C 主机总线 :在 i2c_master_bus_config_t 中指定了配置,则可调用 i2c_new_master_bus()
配置示例
c
i2c_master_bus_handle_t bus_handle = NULL;
i2c_master_dev_handle_t dev_handle = NULL;
i2c_master_bus_config_t bus_config = {
.i2c_port = I2C_MASTER_NUM, // 使用I2C0控制器
.sda_io_num = I2C_MASTER_SDA_IO, //sda的IO口
.scl_io_num = I2C_MASTER_SCL_IO, //scl的IO口
.clk_source = I2C_CLK_SRC_DEFAULT, // 默认时钟源
.glitch_ignore_cnt = 7, // 抗干扰配置(忽略7个时钟毛刺)
.flags.enable_internal_pullup = true// 启用内部上拉
};
esp_err_t ret = i2c_new_master_bus(&bus_config, &bus_handle); //将配置bus_config更新到句柄bus_handle
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Create I2C master bus failed: %s", esp_err_to_name(ret));
return ret;
} 一旦填充好 i2c_device_config_t 结构体的必要参数,就可调用 i2c_master_bus_add_device() 来分配 I2C 设备实例,并将设备挂载到主机总线上。如果函数运行正确,则将返回一个 I2C 设备句柄。若未正确初始化 I2C 总线,此函数将返回 ESP_ERR_INVALID_ARG 错误
配置示例
c
i2c_device_config_t dev_cfg = {
.dev_addr_length = I2C_ADDR_BIT_LEN_7, // 7位I2C地址模式
.device_address = 0x68, // 设备I2C地址
.scl_speed_hz = 100000, // I2C时钟频率:100kHz(标准模式)
};
esp_err_t ret2 = i2c_master_bus_add_device(bus_handle, &dev_cfg, &dev_handle);
if (ret2 != ESP_OK) {
ESP_LOGE(TAG, "Add device 0x%02x failed: %s", 0x68, esp_err_to_name(ret));
return ret2;
}
ESP_LOGI(TAG, "I2C master init success (new i2c_master driver)");
return ESP_OK;通过端口获取 I2C 主控句柄
使用辅助函数 i2c_master_get_bus_handle() 可通过端口获取已初始化的句柄。但请确保句柄已经提前初始化,否则可能会报错。
c
// 源文件 1
#include "driver/i2c_master.h"
i2c_master_bus_handle_t bus_handle;
i2c_master_bus_config_t i2c_mst_config = {
... // 与其他相同
};
ESP_ERROR_CHECK(i2c_new_master_bus(&i2c_mst_config, &bus_handle));
// 源文件 2
#include "driver/i2c_master.h"
i2c_master_bus_handle_t handle;
ESP_ERROR_CHECK(i2c_master_get_bus_handle(0, &handle));I2C 主机写入
在成功安装 I2C 主机总线之后,可以通过调用 i2c_master_transmit() 来向从机设备写入数据。驱动程序用一系列命令填充了一个命令链 ,并将该命令链传递给 I2C 控制器执行,上述流程被封装到了函数i2c_master_transmit() 中
c
esp_err_t i2c_master_transmit(i2c_master_dev_handle_t i2c_dev, const uint8_t *write_buffer, size_t write_size, int xfer_timeout_ms)参数
- i2c_dev ------ in I2C 主设备处理由
i2c_master_bus_add_device创建的设备。 - write_buffer -- in 数据字节通过 I2C 总线发送。
- write_size -- 字节 写缓冲区的大小,单位为字节。
- xfer_timeout_ms ------ in 等待暂停,按毫秒。注:-1 意味着永远等待
返回值
- ESP_OK:I2C 主传输成功。
- ESP_ERR_INVALID_RESPONSE:I2C 主传输接收 NACK。
- ESP_ERR_INVALID_ARG:I2C 主传输参数无效。
- ESP_ERR_TIMEOUT:作超时(大于 xfer_timeout_ms),因为总线忙或硬件崩溃。
写入示例
数据包通常用数组表示
c
esp_err_t qmc5883p_write_register(qmc5883p_dev_t *dev, uint8_t reg, uint8_t value) {
// 参数校验:设备/设备句柄不能为空
if (!dev || !dev->dev_handle) return ESP_ERR_INVALID_ARG;
uint8_t tx[2] = {reg, value}; // 待发送数据:[寄存器地址, 数值]
// I2C写操作:发送2字节,超时1000ms
return i2c_master_transmit(dev->dev_handle, tx, 2, 1000);
}
c
esp_err_t II2C_Master_Write(uint8_t addr, uint8_t reg, uint16_t len, uint8_t* data)
{
if (bus_handle == NULL || data == NULL || len == 0) {
ESP_LOGE(TAG, "Invalid param: bus=%p, data=%p, len=%d", bus_handle, data, len);
return ESP_ERR_INVALID_ARG;
}
esp_err_t ret;
uint8_t *buf = (uint8_t *)malloc(len+1);
if (buf == NULL) {
ESP_LOGE(TAG, "Malloc failed for write buf, len=%d", len + 1);
return ESP_ERR_NO_MEM;
}
buf[0] = reg;// 把寄存器地址放到缓冲区第1个字节(I2C写规则:先送寄存器地址,再送数据)
for (int i = 0; i < len; i++) //把要写入的数据拷贝到缓冲区(从第2个字节开始)
{
buf[i+1] = data[i];
}
// 发送总长度:1(寄存器)+len(数据)
ret = i2c_master_transmit(dev_handle, buf, len+1, I2C_MASTER_TIMEOUT_MS / portTICK_PERIOD_MS);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Write failed: addr=0x%02x, reg=0x%02x, len=%d, err=%s", addr, reg, len, esp_err_to_name(ret));
}
free(buf);
return ret;
}I2C 主机读取
在成功安装 I2C 主机总线后,可以通过调用 i2c_master_receive() 从从机设备读取数据
I2C 主机写入后读取
一些 I2C 设备中读取数据之前需要进行写入配置,可通过 i2c_master_transmit_receive() 接口进行配置
c
esp_err_t i2c_master_transmit_receive(i2c_master_dev_handle_t i2c_dev, const uint8_t *write_buffer, size_t write_size, uint8_t *read_buffer, size_t read_size, int xfer_timeout_ms)参数
- i2c_dev ------ in I2C 主设备处理由
i2c_master_bus_add_device创建的设备。 - write_buffer -- in 数据字节通过 I2C 总线发送。
- write_size -- 字节 写缓冲区的大小,单位为字节。
- read_buffer -- 输出 从 i2c 总线接收的数据字节。
- read_size -- 字节 读取缓冲区的大小。
- xfer_timeout_ms ------ in 等待暂停,按毫秒。注:-1 意味着永远等待。
返回值
- ESP_OK:I2C 主控发送-接收成功。
- ESP_ERR_INVALID_RESPONSE:I2C 主发送-接收接收 NACK。
- ESP_ERR_INVALID_ARG:I2C 主传输参数无效。
- ESP_ERR_TIMEOUT:作超时(大于 xfer_timeout_ms),因为总线忙或硬件崩溃。
读取示例
c
esp_err_t II2C_Master_Read(uint8_t addr, uint8_t reg, uint16_t len, uint8_t* data)
{
if (bus_handle == NULL || data == NULL || len == 0) {
ESP_LOGE(TAG, "Invalid param: bus=%p, data=%p, len=%d", bus_handle, data, len);
return ESP_ERR_INVALID_ARG;
}
// 一次完成「写寄存器地址+读数据」
esp_err_t ret = i2c_master_transmit_receive(dev_handle, ®, 1, data, len, I2C_MASTER_TIMEOUT_MS / portTICK_PERIOD_MS);
if (ret != ESP_OK) {
ESP_LOGE(TAG, "Read failed: addr=0x%02x, reg=0x%02x, len=%d, err=%s", addr, reg, len, esp_err_to_name(ret));
}
return ret;
}I2C 主机探测
I2C 驱动程序可以使用 i2c_master_probe() 来检测设备是否已经连接到 I2C 总线上。如果该函数返回 ESP_OK,则表示该设备已经被检测到
在调用该函数时,必须将上拉电阻连接到 SCL 和 SDA 管脚。如果在正确解析 xfer_timeout_ms 时收到 ESP_ERR_TIMEOUT ,则应检查上拉电阻。若暂无合适的电阻,也可将 flags.enable_internal_pullup 设为 true。
c
esp_err_t i2c_master_probe(i2c_master_bus_handle_t bus_handle, uint16_t address, int xfer_timeout_ms)参数
- bus_handle ------ in I2C 主设备处理由
i2c_master_bus_add_device创建的设备。 - address ------in 你想探测的 I2C 设备地址。
- xfer_timeout_ms ------ in 等待暂停,按毫秒。注意:-1 表示等待非常久(此函数不推荐)
返回值
- ESP_OK:I2C 设备成功探测。
- ESP_ERR_NOT_FOUND:I2C 探头失败,找不到你给的具体地址的设备。
- ESP_ERR_TIMEOUT:作超时(大于 xfer_timeout_ms),因为总线忙或硬件崩溃。
注:旧驱动程序与新驱动程序无法共存
IMU数据多线程共享
需求分析:由于MPU6050 的偏航角没有重力参考,所以数据会产生较大的漂移,为了解决这个问题,采用外接三轴磁力计QMC5883 构成9轴陀螺仪来纠正零偏,在ESPIDF中,IMU和磁力计的数据读取示两个不同的任务(线程),为了将两者的数据融合,就必须使用线程间通信 同时获取两个传感器的输出,此处我使用的用互斥锁(Mutex)保护全局变量
全局缓存+互斥锁
c
// 全局缓存+互斥锁
static imu_data_t g_imu_shared_data = {0};
static SemaphoreHandle_t g_imu_shared_mutex = NULL;初始化互斥锁,用于imu数据共享
c
void imu_shared_init(void) {
if (g_imu_shared_mutex == NULL) {
g_imu_shared_mutex = xSemaphoreCreateMutex();
}
}更新IMU数据(供回调函数调用)
c
void imu_shared_update_data(const imu_data_t *in_data) {
if (in_data == NULL || g_imu_shared_mutex == NULL) return;
// 加锁写入
if (xSemaphoreTake(g_imu_shared_mutex, portMAX_DELAY) == pdTRUE)//获取锁的控制权,portMAX_DELAY永久等待
{
g_imu_shared_data = *in_data; // 拷贝数据
xSemaphoreGive(g_imu_shared_mutex);//释放锁的控制权
}
}获取最新IMU数据(线程安全)
c
bool imu_shared_get_data(imu_data_t *out_data){
if (out_data == NULL || g_imu_shared_mutex == NULL) return false;
// 加锁读取
if (xSemaphoreTake(g_imu_shared_mutex, pdMS_TO_TICKS(10)) == pdTRUE) {
*out_data = g_imu_shared_data; // 拷贝数据
xSemaphoreGive(g_imu_shared_mutex);
return true;
}
return false;
}在IMU初始化时候对互斥锁初始化
c
// 初始化ICM42670P
void Icm42670p_Init(void)
{
...// 初始化I2C接口 ,IIC.c配置主机参数
imu_shared_init(); // 初始化imu共享数据
...// 开启IMU任务 ,Icm42670p_Task任务函数
}由于对于6轴IMU芯片ICM42670P来说,程序中imu数据的获取在 imu_callback()中,所以在该函数中,将读取到的数据写入全局变量,并通过互斥锁保护全局变量
本地地址:D:\ESP_IDF_FILES\ESP32S3\ESP32_01\components\ICM42670P\ICM42670P.c
c
static void imu_callback(inv_imu_sensor_event_t *event){
...
// 获取角速度 (由于开启了 DMP,这里的 gyro 是经过芯片内部自动去偏置的)
float gx = (float)event->gyro[0] * icm_gyro_fsr_dps / (float)INT16_MAX;
float gy = (float)event->gyro[1] * icm_gyro_fsr_dps / (float)INT16_MAX;
float gz = (float)event->gyro[2] * icm_gyro_fsr_dps / (float)INT16_MAX;
// 3. 获取加速度用于修正 Roll 和 Pitch
float ax = (float)event->accel[0];
float ay = (float)event->accel[1];
float az = (float)event->accel[2];
imu_data_t imu_data;
//写入imu结构体,用于数据共享
imu_data.gyro[0] = gx;
imu_data.gyro[1] = gy;
imu_data.gyro[2] = gz;
imu_data.accel[0] = ax;
imu_data.accel[1] = ay;
imu_data.accel[2] = az;
imu_shared_update_data(&imu_data);//更新IMU数据
...
}在读取磁力计QMC5883P数据的任务中,获取共享的IMU数据
**本地地址:**D:\ESP_IDF_FILES\ESP32S3\ESP32_01\components\IMU_MAG\IMU_MAG.c
c
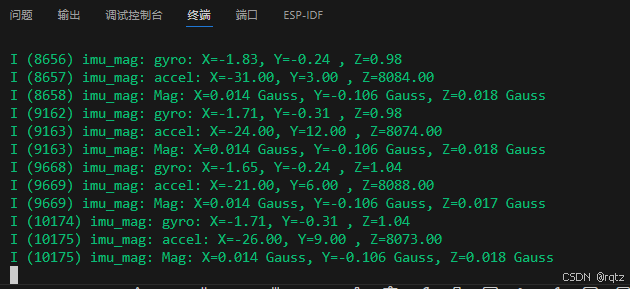
static void qmc5883p_test_task(void *arg){
...//磁力计初始化
// 无限循环:持续读取磁力计数据
while (1){
...
//线程程间通信获取imu数据
bool is_imu_ok = imu_shared_get_data(&imu_data);
if (is_imu_ok){
ESP_LOGI(TAG, "gyro: X=%.2f, Y=%.2f , Z=%.2f ",imu_data.gyro[0],imu_data.gyro[1],imu_data.gyro[2]); //共享的imu角速度数据
ESP_LOGI(TAG, "accel: X=%.2f, Y=%.2f , Z=%.2f ",imu_data.accel[0],imu_data.accel[1],imu_data.accel[2]);//共享imu加速度数据
ESP_LOGI(TAG, "Mag: X=%.3f Gauss, Y=%.3f Gauss, Z=%.3f Gauss", data.x, data.y, data.z); // 打印磁力计三轴高斯值(单位:高斯)
...
}
}
}成功
imu磁力计数据融合
ICM42670数据手册 :ICM-42670-P -PDF数据手册-参考资料-立创商城
Qmc5883p数据手册 : QMC5883P -PDF数据手册-参考资料-立创商城
磁力计校准
磁力计测出来的磁场 = 地球磁场 + 干扰磁场
硬铁补偿
硬铁 = 永磁体、固定磁场源(电机磁铁,喇叭磁铁,电池、电路板上的永磁材料等),它们会在磁力计周围产生一个固定方向、固定大小的偏置磁场。
表现
-
理想磁力计绕一圈,数据应该是以原点为中心的圆 / 球(例 -0.5 ~ 0 ~ 0.5)
-
有硬铁干扰 → 整个圆整体平移偏移,中心不在原点(例 -0.1 ~ 0 ~ 0.6)
补偿方法
- 转8字校准:减去一个固定偏移量 (mx, my, mz)
- 记录磁力计x,y,z轴 输出的数据的 最大,最小值(单位高斯)
- 计算偏移量:(最大+最小)/2
代码示例
由于最大最小值可能不会固定,所以需要再代码中添加自动更新
c
// 获取偏移测量值
static float x_max = X_MAX_OFFSET;
static float x_min = X_MIN_OFFSET;
static float y_max = Y_MAX_OFFSET;
static float y_min = Y_MIN_OFFSET;
static float z_max = Z_MAX_OFFSET;
static float z_min = Z_MIN_OFFSET;
//转8字校准后的值
if (data.x > x_max) x_max = data.x;
if (data.x < x_min) x_min = data.x;
if (data.y > y_max) y_max = data.y;
if (data.y < y_min) y_min = data.y;
if (data.z > z_max) z_max = data.z;
if (data.z < z_min) z_min = data.z;
// 根据x,y轴最大最小数据进行手动补偿
float offset_x = (x_max+x_min)/2.0f;//x轴偏移:(0.19 + (-0.16)) / 2 = 0.03 / 2 =0.015
float offset_y = (y_max+y_min)/2.0f;//Y轴偏移:(-0.02 + (-0.32)) / 2 = -0.34 / 2 =0.017
float offset_z = (z_max+z_min)/2.0f;
// 消除硬铁干扰(归零)
float cal_x = data.x - offset_x;
float cal_y = data.y - offset_y;
float cal_z = data.z - offset_z;软铁补偿
软铁 = 导磁材料,但本身不带磁(铁壳,螺丝、金属支架等),它们不会自己产生磁场 ,但会扭曲、拉伸、改变地球磁场的分布
表现
- 理想是圆 → 软铁干扰后变成椭圆
- 三轴灵敏度不一致、方向畸变
补偿方法:把磁力计三轴的磁场幅值(半径)归一化到同一个目标值,消除三轴因软铁干扰导致的 "拉伸 / 压缩" 差异,让椭圆变回正圆。
代码示例
c
// 软铁补偿
// 计算三轴各自的半径(半长轴)
float x_r = (x_max-x_min)/2.0f; // X轴磁场最大值-最小值的一半 → X轴方向的"有效半径"
float y_r = (y_max-y_min)/2.0f; // Y轴同理
float z_r = (z_max-z_min)/2.0f; // Z轴同理
// 计算三轴半径的平均值 → 目标半径(理想正圆的半径)
float target_r = (x_r+y_r+z_r)/3.0f;
// 防止除以0(避免分母为0导致程序崩溃)
if(x_r > 0 && y_r > 0 && z_r > 0){
// 软铁补偿核心:将校准后的三轴数据归一化到目标半径
cal_x *= (target_r / x_r); // X轴缩放:如果x_r偏大,就缩小;偏小就放大
cal_y *= (target_r / y_r); // Y轴同理
cal_z *= (target_r / z_r); // Z轴同理
}确认imu坐标系和磁力计坐标系统一
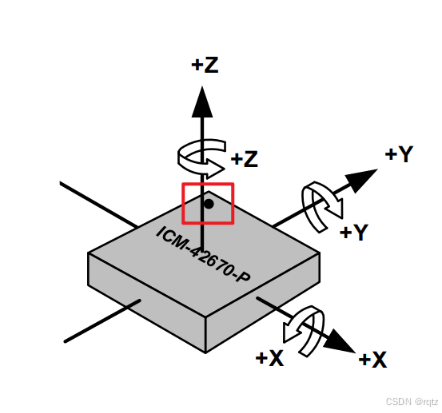
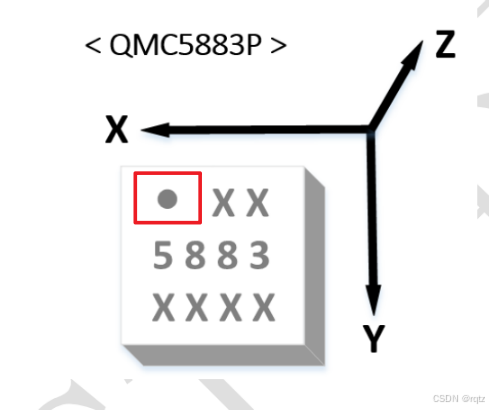
硬件安装软件修正
- imu硬件安装:imu的x轴朝向小车的左方 ,y轴朝向后方
- 磁力计硬件安装:磁力计的x轴朝向小车的右方 ,y轴朝向前方
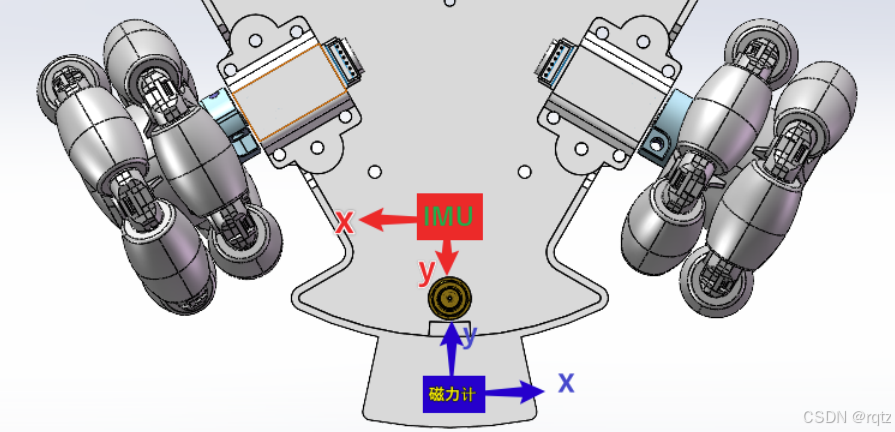
软件修正
c
// 坐标系重映射:将 IMU 原始轴向映射到小车标准轴向(X前,Y左)
float _ax = -imu_data.accel[1]; // 物理前方 (原Y是后,取反就是前)
float _ay = imu_data.accel[0]; // 物理左方 (原X就是左)
float _az = imu_data.accel[2]; // 物理上方 (保持不变)
float _gx = -imu_data.gyro[1]; // 绕小车X轴转动(对应现在的侧倾)
float _gy = imu_data.gyro[0]; // 绕小车Y轴转动(对应现在的抬头)
float _gz = imu_data.gyro[2]; // 绕小车Z轴转动(原地转圈)
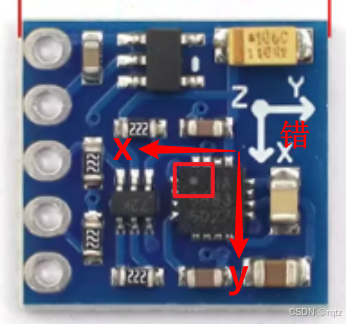
//纠正磁力计方向为小车方向(qmc5883p丝印xy轴错误)
float mag_x = cal_y;
float mag_y = -cal_x;
float mag_z = cal_z;磁力计QMC5883p模块坐标系丝印致命错误❌
- 经过倾斜补偿实测,确认该磁力计模块的坐标系标注错误,我说倾斜补偿怎么一直调试的有问题😈
读取IMU数据
在imu数据来临时添加积分的时间
c
//获取积分时间微秒级
uint64_t current_time = inv_imu_get_time_us();
float dt = (last_imu_time != 0) ? (current_time - last_imu_time) / 1000000.0f : 0.0f;
last_imu_time = current_time;加速度计算 翻滚角Roll 俯仰角Pitch
通过重力投影解算角度,无漂移
公式
ϕ = arctan 2 ( a y ′ , a z ′ ) 翻滚角 θ = arctan 2 ( − a x ′ , a y ′ 2 + a z ′ 2 ) 俯仰角 \phi = \arctan2\left( a_y', a_z' \right)翻滚角\\ \theta = \arctan2\left( -a_x', \sqrt{a_y'^2 + a_z'^2} \right) 俯仰角 ϕ=arctan2(ay′,az′)翻滚角θ=arctan2(−ax′,ay′2+az′2 )俯仰角
公式推导 :见 【嵌入式】ESP32S3主控底盘驱动代码及其原理(ESPIDF)_esp-idf esp32 s3 modbus主控代码-CSDN博客
代码
c
float accel_roll = atan2f(_ay, _az)* 180.0f / M_PI;
float accel_pitch = -atan2f(_ax, sqrt(_ay*_ay + _az*_az)) * 180.0f / M_PI;- 优点:长期稳定(是角度的 "绝对参考");
- 缺点:响应慢,运动时(如设备快速移动)会受线加速度干扰,角度瞬间跳变
无法计算偏航角yaw原因
- 俯仰角和翻滚角的计算都是依靠重力加速度的,在小车呈现出不同的姿态时,重力加速度会在x,y轴上产生分量,从而计算出角度
- 偏航角是绕z轴旋转产生的角度,而重力加速度只会在x,y轴上产生分量,它与z轴方向平行,所以无法计算。
陀螺仪积分计算翻滚角Roll 俯仰角Pitch
角速度 × 时间 = 角度变化量 ,因此 roll + _gx * dt 是通过陀螺仪 "积分" 得到的当前角度;
代码示例
c
//获取积分时间微秒级
uint64_t current_time = inv_imu_get_time_us();
float dt = (last_imu_time != 0) ? (current_time - last_imu_time) / 1000000.0f : 0.0f;
last_imu_time = current_time;
roll = roll + _gx * dt;
pitch = pitch + _gy * dt;- 优点:响应快,不受运动(如晃动、平移)影响;
- 缺点 :存在积分漂移(微小误差随时间累加,角度会慢慢偏离真实值)静止时表现突出
互补滤波横滚俯仰角
用陀螺仪 解决加速度计 "易受运动干扰" 的问题,用加速度计解决陀螺仪 "长时间漂移" 的问题
代码示例
c
// 互补滤波:98% 信任陀螺仪积分,2% 信任加速度计修正 (消除漂移的关键)
roll = 0.98f * (roll + _gx * dt) + 0.02f * (accel_roll);
pitch = 0.98f * (pitch + _gy * dt) + 0.02f * (accel_pitch);磁力计倾斜补偿
- 已知校准后的磁力计三轴数据:mx,my,mz(硬铁 + 软铁补偿后);
- 已知融合后的欧拉角:横滚角 ϕ(Roll)、俯仰角 θ(Pitch)(弧度制)
公式
{ m x h = m x ⋅ cos θ + m y ⋅ sin ϕ ⋅ sin θ + m z ⋅ cos ϕ ⋅ sin θ m y h = m y ⋅ cos ϕ − m z ⋅ sin ϕ % 磁力计倾斜补偿核心公式 \begin{cases} m_{xh} = m_x \cdot \cos\theta + m_y \cdot \sin\phi \cdot \sin\theta + m_z \cdot \cos\phi \cdot \sin\theta \\ m_{yh} = m_y \cdot \cos\phi - m_z \cdot \sin\phi \end{cases} {mxh=mx⋅cosθ+my⋅sinϕ⋅sinθ+mz⋅cosϕ⋅sinθmyh=my⋅cosϕ−mz⋅sinϕ
公式推导:
Using LSM303DLH for a tilt compensated electronic compass
代码示例
C
// 磁力计倾斜补偿:对于atan2f(-cal_y, cal_x)它默认x和y始终处于水平面,当roll和pitch变化时,yaw会产生剧烈跳变
float xMag = mag_x*cosf(pitch_rad) + mag_y*sinf(roll_rad)*sinf(pitch_rad) + mag_z*cosf(roll_rad)*sinf(pitch_rad);
float yMag = mag_y*cosf(roll_rad) - mag_z*sinf(roll_rad); //减号还是加号,取决z轴是朝上还是朝下参考视频:磁力计偏航角跳变问题
Z轴角速度积分与磁力计计算稳定yaw
校准后磁力计数据计算弧度
c
// 计算弧度(逆时针转动yaw增加,原来是顺时针,所以加负号)
float heading_rad = atan2f(-yMag, xMag);三角滤波+一阶低通滤波消除 360 ~ 0度跳变非线性问题与噪声
问题分析:假设直接对角度进行 一阶低通滤波(EMA),角度的变化范围是 0~360,当角度从359 ~ 1度时,根据EMA 滤波计算(filtered = 0.5× 新值 + 0.5× 旧值)
得到的滤波结果是 0.5×1 + 0.5×359 = 0.5 + 179.5 = 180° ,此时滤波值从 359° 突变到 180°,完全偏离实际旋转方向!,在图形化界面展示就是角度不会平滑的在坐标轴上到1度 的转变,而是会发生剧烈的跳变。
问题本质 :角度的 "不连续性" ,角度的取值范围是[0°, 360°),但数值上:
- 当角度从 359°→360°(=0°)时,数值从 359→0,跳变了 359;
- 数学上角度是 "模 360° 的循环量",但数值本身是线性的,EMA 滤波无法识别这种循环特性。
- 物理旋转:连续的:设备只旋转了 1°
- 数值表示:断点式跳变:数值从 359 直接掉到 0,差值是 - 359(而非 - 1),
解决方法:三角函数滤波 , 正弦 / 余弦的 "连续性", sin/cos 是光滑的周期函数(没有断点)
- 359度的sin值(-0.01745) 和 1度的sin值(0.01745) 是连续变化的(差值仅 0.0349),cos 值几乎不变(0.99985),滤波还原的角度自然平滑,无跳变
- 0.5×0.01745 + 0.5×(-0.01745) = 0
代码示例
c
// 计算当前角度的正弦余弦值(三角滤波)
float sin_rad = sinf(heading_rad);
float cos_rad = cosf(heading_rad);
static float filtered_sin = 0.0f; // 静态变量保存滤波后的sin值
static float filtered_cos = 1.0f; // 静态变量保存滤波后的cos值
filtered_sin = EMA(sin_rad, filtered_sin);
filtered_cos = EMA(cos_rad, filtered_cos);
// 从滤波后的正弦余弦值计算角度(弧度)
float filtered_rad = atan2f(filtered_sin, filtered_cos);
//转角度
float filtered_deg = filtered_rad * (180.0f / M_PI);EMA低通滤波
c
float EMA(float rawValue, float filteredValue)
{
return ALPHA * rawValue + (1 - ALPHA) * filteredValue;
}归一化
c
// 归一化到 0-360
if (filtered_deg < 0.0f) {
filtered_deg += 360.0f;
}
else if (filtered_deg >= 360.0f) {
filtered_deg -= 360.0f;
}磁力计与预测值之间的"最短路径误差"
问题分析:比如磁力计 Yaw 是 10°,陀螺仪预测是 350°,直接算误差是 - 340°,但实际最短误差是 20°(350°→360°→10°);
解决问题 :把磁力计和陀螺仪积分后的差值限制在[-180, 180],避免融合时出现 "反向修正" 的错误。
代码示例
c
// 计算陀螺仪积分的预测值,短期精准的 Yaw 预测值(但长期会漂移)
float predicted_yaw = yaw +_gz * dt;
// 计算磁力计(已滤波)与预测值之间的"最短路径误差"
float yaw_error = filtered_deg - predicted_yaw;
// 确保误差在 [-180, 180] 之间
if (yaw_error > 180.0f) {
yaw_error -= 360.0f;
} else if (yaw_error < -180.0f) {
yaw_error += 360.0f;
}互补滤波为稳定偏航角
c
// 融合:在预测值的基础上修正误差的 5%
yaw = predicted_yaw + 0.05f * yaw_error;
// 保持输出在 0-360 范围内
if (yaw >= 360.0f) yaw -= 360.0f;
if (yaw < 0.0f) yaw += 360.0f;归一化
c
// 归一化到 0-360
if (filtered_deg < 0.0f) {
filtered_deg += 360.0f;
}
else if (filtered_deg >= 360.0f) {
filtered_deg -= 360.0f;
}磁力计与预测值之间的"最短路径误差"
问题分析:比如磁力计 Yaw 是 10°,陀螺仪预测是 350°,直接算误差是 - 340°,但实际最短误差是 20°(350°→360°→10°);
解决问题 :把磁力计和陀螺仪积分后的差值限制在[-180, 180],避免融合时出现 "反向修正" 的错误。
代码示例
c
// 计算陀螺仪积分的预测值,短期精准的 Yaw 预测值(但长期会漂移)
float predicted_yaw = yaw +_gz * dt;
// 计算磁力计(已滤波)与预测值之间的"最短路径误差"
float yaw_error = filtered_deg - predicted_yaw;
// 确保误差在 [-180, 180] 之间
if (yaw_error > 180.0f) {
yaw_error -= 360.0f;
} else if (yaw_error < -180.0f) {
yaw_error += 360.0f;
}互补滤波为稳定偏航角
c
// 融合:在预测值的基础上修正误差的 5%
yaw = predicted_yaw + 0.05f * yaw_error;
// 保持输出在 0-360 范围内
if (yaw >= 360.0f) yaw -= 360.0f;
if (yaw < 0.0f) yaw += 360.0f;