在具身智能 (Embodied AI)浪潮席卷全球的今天,机器人学习 正迎来关键突破。如何让机器人像人类一样"看懂世界、理解动作、精准执行"?数据采集 的质量与效率,成为决定AI训练 成败的关键瓶颈。
近日,MOXI具身智能惯性动捕系统 与Manus数据手套 强强联合,打造出一套"从人类示范到Sim2Real落地"的完整闭环解决方案,为机器人训练 领域带来全新范式!
MOXI × Manus 具身智能动捕黄金组合
核心方案: 从人类示范到Sim2Real的完整闭环
MOXI 具身智能 动捕系统 ****,****采用高精度惯性动捕技术,无需摄像头,轻便灵活,实时高保真还原全身姿态。
Manus数据手套 ****,****则专注于手部动作的精细捕捉,具备零漂移、抗遮挡、毫米级精度等特性,25自由度全方位捕捉指尖微动作。
两者结合实现了全身+手指全维度的高精度数据采集。
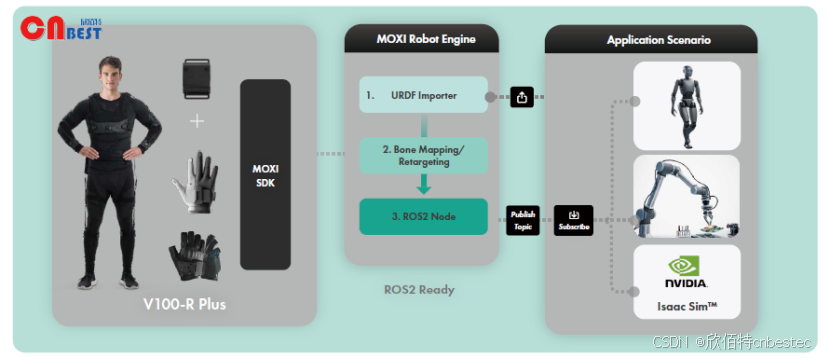
并通过NVIDIA Isaac Sim仿真平台 ,真正实现了:人类示范 → 数据采集 → 仿真合成 → VLA训练 → Sim2Real落地的全链路无缝闭环,使研究人员和开发者能够快速构建完整的机器人训练流程。
实际演示:流畅完成复杂灵巧任务

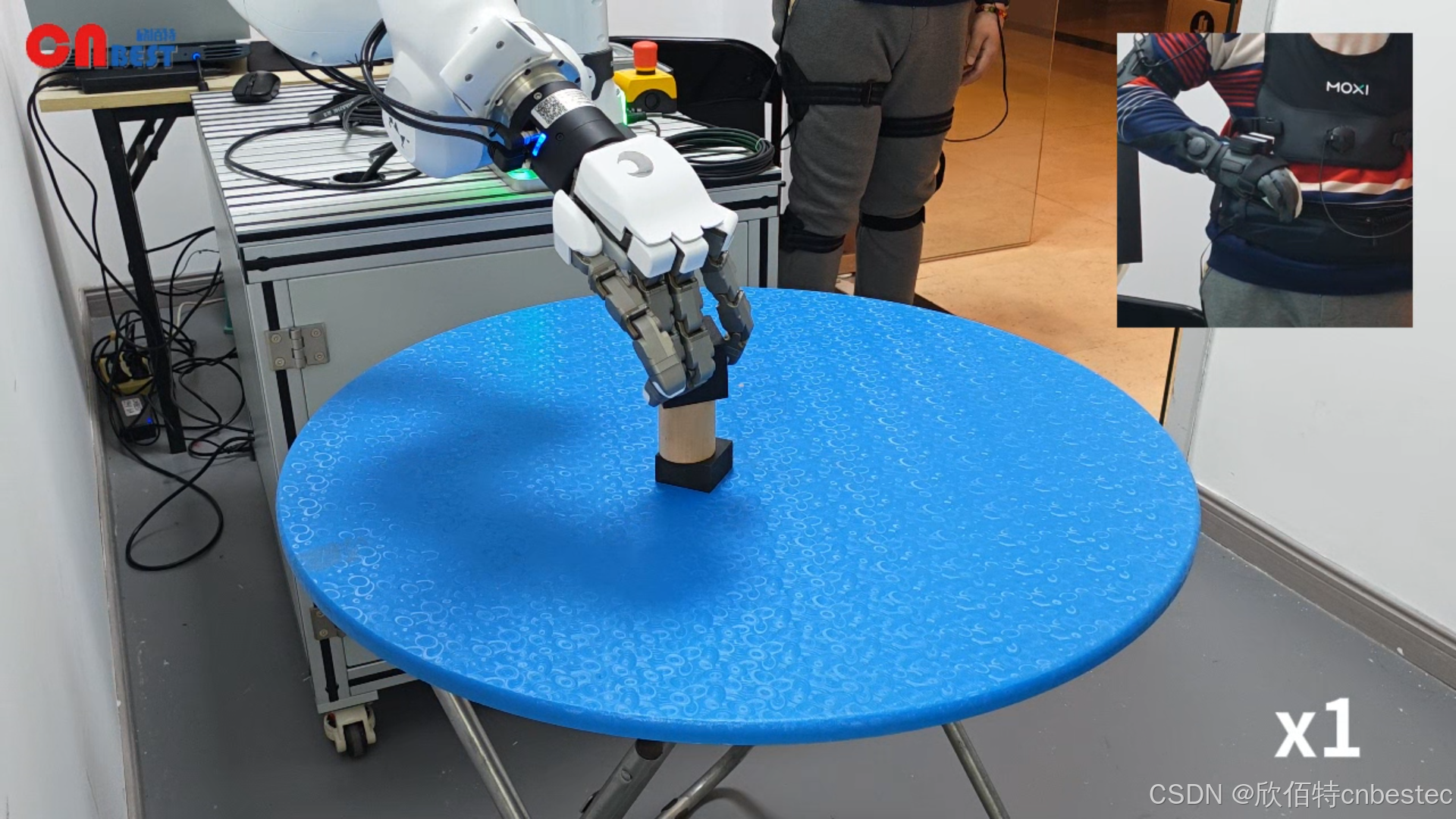
在最新演示视频中,MOXI × Manus采集的高保真动捕数据,在Isaac Sim中实时遥操作Franka FR3七轴机械臂与Tesollo DG-5F-M五指灵巧手,流畅完成了抓取倒水、积木精准抓取与堆叠等连续灵巧任务。这一演示验证了动作高精度映射与高效数据采集的实际效果。
MOXI 全身动捕 的三大核心优势
科研级精度保障:15个九轴IMU传感器,结合手指模块,达到±2°的精度和100Hz刷新率,为AI训练提供高效可靠的数据基础。
无缝开发集成体验:兼容Jetson平台和ROS2框架,支持Omniverse/Isaac Sim生态系统,提供离线处理能力和标准接口,实现开箱即用。
机器人原生适配能力:MOXI引擎支持一键骨骼映射,已适配宇树机器人、Franka FR3、UR机械臂、睿尔曼等主流机器人平台,简化全身控制与机械臂协同的开发流程。
行业意义与未来展望

MOXI与Manus的合作,不仅实现了动捕技术的优势互补,更构建了机器人VLA训练的完整闭环,有效破解了行业数据采集与链路协同的核心痛点,对推动具身智能训练技术的普及与升级具有重要意义。
据悉,基于MOXI×Manus组合的UR真机部署方案即将重磅上线,届时将进一步拓展技术应用场景,推动具身智能技术在工业制造、科研实验、服务机器人等更多领域的规模化落地。
欢迎关注 "欣佰特科技 " ,持续为大家带来 "具身智能领域 "前沿技术及应用!详情可邮件咨询++++sales@cnbestec.com++++