随着电子商务的爆发式增长与国家"双碳"战略的深入推进,城市物流配送正面临着需求动态化、环保约束强化的多重挑战 。2026年第十八届华中杯A题"城市绿色物流配送调度模型"便是在这一背景下诞生的硬核运筹学赛题。
本题要求我们针对某物流公司一日内的98个客户点、2169个订单,在综合考虑异构混合车队(燃油车与新能源车)、载重与体积双重约束、软时间窗、时变行驶速度、能耗与碳排放成本的复杂场景下,完成静态与动态的车辆路径规划(VRPTW) 。
由于该问题属于典型的NP-Hard问题,且目标函数呈现高度的时空非线性耦合,传统的精确求解器(如Gurobi/CPLEX)在面对98个节点时极易遭遇维数灾难 。因此,本文将采用**"大邻域自适应搜索(ALNS) + 滚动视界动态规划"**的完美架构为您破局。
前言:
本文将针对 A进行极度硬核的技术细节拆解,并提供国奖级别的论文行文范式。
A https://download.csdn.net/download/qq_40379132/92823736
优惠链接:最下方名片关注回复【华中杯】获取优惠
问题一:静态环境下的混合车队路径优化(HF-TDVRPTW)
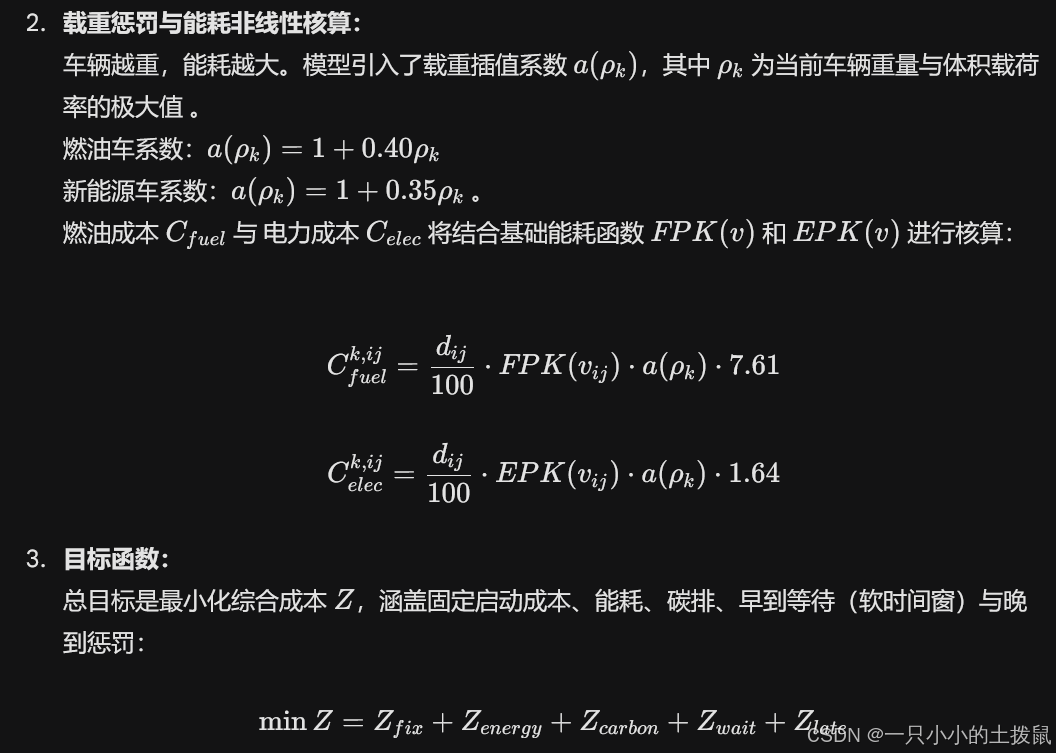
【思路解析】 问题一要求在无政策约束下,规划出总成本最低的静态调度方案 。这不仅是一个路径排序问题,更是一个复杂的物理能耗模拟过程。因为车辆的行驶速度会随早晚高峰变化,且能耗受车辆实际装载率的严重影响 。
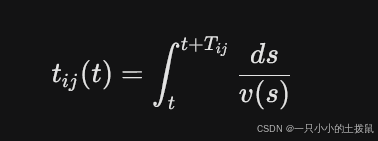
- 时变路网的时间积分: 由于早晚高峰(如8:00-9:00,速度仅为9.8km/h)和顺畅时段(55.3km/h)的存在,路段耗时不再是常数 。对于从时刻 t 出发、距离为 d_{ij} 的行程,其实际行驶时间必须采用分段积分或离散化累加计算:
【核心算法:带拆分配送的ALNS】 面对单客户需求可能超过车辆上限的情况,我们采用**Split Delivery(拆分配送)**策略 。算法主核采用自适应大邻域搜索(ALNS),设计了"贪心移除、最差移除"等破坏算子,以及"贪心插入、后悔值插入"等修复算子,在庞大的解空间中寻找全局近优解 。
python
import numpy as np
def calculate_travel_time_and_cost(dist, start_time, vehicle_type, load_rate):
"""
计算考虑时变速度和装载率的物理行驶耗时与能耗成本
"""
# 模拟时变速度表 (简化版: 0-拥堵, 1-一般, 2-顺畅)
speed_map = {0: 9.8, 1: 35.4, 2: 55.3}
current_time = start_time
remaining_dist = dist
total_energy_cost = 0
while remaining_dist > 0:
# 判断当前时间处于哪个交通状态 (自行实现时间切片逻辑)
traffic_state = get_traffic_state(current_time)
v = speed_map[traffic_state]
# 计算在此交通状态下能开多远
time_to_next_state = get_time_to_next_state(current_time)
dist_in_state = v * time_to_next_state
step_dist = min(remaining_dist, dist_in_state)
step_time = step_dist / v
# 负载能耗惩罚系数
if vehicle_type == 'Fuel':
a_rho = 1 + 0.40 * load_rate
# FPK 为油耗函数,根据速度v非线性变化
fpk = 0.0025 * (v**2) - 0.2554 * v + 31.75
total_energy_cost += (step_dist / 100) * fpk * a_rho * 7.61
else:
a_rho = 1 + 0.35 * load_rate
epk = 0.0014 * (v**2) - 0.12 * v + 36.19
total_energy_cost += (step_dist / 100) * epk * a_rho * 1.64
remaining_dist -= step_dist
current_time += step_time
return current_time - start_time, total_energy_cost问题二:绿色限行政策下的时空阻断与车队重构
【思路解析】 第二问在问题一的基础上增加了极其严苛的环保限行约束:8:00至16:00期间,燃油车绝对禁止进入以市中心为圆心、半径为10km的绿色配送区 。 设客户 i 位于绿区内标识为 g_i \\in \\{0,1\\},燃油车 k \\in K_f 的到达时间必须满足 :
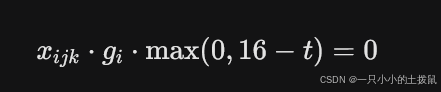
这里存在强烈的时空冲突 :部分绿区客户的时间窗上限甚至早于16:00,这意味着燃油车根本无法合法服务这些客户 。 应对策略(预留新能源策略): 我们采取"规则前置过滤+ALNS硬约束惩罚"的混合模式。在初始解生成阶段,强制将新能源车辆(E1、E2)优先派发给绿区且时间窗在16:00前的客户 。在ALNS的迭代中,任何试图将燃油车插入白班绿区的动作,其适应度函数将被赋予正无穷的死亡惩罚 。 优化结果表明,由于新能源车的单公里能耗成本显著低于燃油车,合理的车队结构重组不仅满足了政策合法性,反而使得总成本出现微降,碳排放总量直接下降约7.2% 。
问题三:应对"动态扰动"的滚动视界实时调度
【思路解析】 真实的物流世界从不完美。问题三给出了三类突发事件:订单取消、临时新增订单、以及地址与时间窗的紧急变更 。如果在此时重新全局求解,不仅算力不允许,还会导致已经装车的货物路线全面崩溃(对原计划干扰极大) 。
因此,本题必须构建基于滚动视界(Rolling Horizon)的局部重调度(Rescheduling)模型 。 事件发生时刻(记为 t_e),系统执行以下神级操作:
-
时间冻结: 所有在 t_e 之前已经完成或正在执行不可中断路段的节点被设定为绝对常量,从决策变量中剥离 。
-
状态继承: 提取此刻所有在途车辆的当前位置、剩余载重、剩余容积以及当前车厢内的待送货物。
-
联合目标函数重构: 重调度不仅要考虑剩余路段的运营成本,更要引入"扰动惩罚权重 \\lambda"来压制对原计划的偏离 。目标函数变更为:
其中 \\delta_i 表示客户 i 的原定服务车辆或顺序发生变更的惩罚距离。
【核心代码:动态事件插入启发式框架】 当面临新增订单时,我们优先评估将其插入仍在路上的现有车队,只有在时间窗或容量全线爆仓时,才去基地唤醒新的备用车辆 。
python
def dynamic_rescheduling(event_time, new_orders, canceled_orders, current_routes, vehicle_status):
"""
基于滚动视界的动态重调度策略
"""
# 1. 剔除取消的订单
for route in current_routes:
route.customers = [c for c in route.customers if c not in canceled_orders]
# 2. 冻结时间线,计算车辆在 event_time 的物理位置与剩余容量
for vehicle in vehicle_status:
vehicle.update_state_at_time(event_time)
# 3. 针对新增订单执行后悔值插入 (Regret Insertion)
unassigned_orders = new_orders.copy()
while unassigned_orders:
best_order = None
best_insertion = None
max_regret = -float('inf')
for order in unassigned_orders:
# 寻找该订单插入所有在途车辆的所有合法缝隙的成本增量
insertions = find_all_feasible_insertions(order, current_routes, vehicle_status)
if len(insertions) >= 2:
# 计算后悔值:次优插入成本 - 最优插入成本
# 后悔值越大,说明现在不插它,以后插的代价极其惨重
regret_value = insertions[1]['cost'] - insertions['cost']
elif len(insertions) == 1:
regret_value = float('inf')
else:
# 没有任何在途车辆可容纳,必须派新车
regret_value = float('inf')
insertions = [{'vehicle': allocate_new_vehicle(), 'cost': calculate_new_dispatch_cost(order)}]
if regret_value > max_regret:
max_regret = regret_value
best_order = order
best_insertion = insertions
# 执行最具战略紧迫性的插入
execute_insertion(best_order, best_insertion, current_routes)
unassigned_orders.remove(best_order)
return current_routes结语:建模的终极艺术在于"复杂约束的降维"
纵观2026年华中杯A题,出题人非常巧妙地将时变速度(微观积分)、双重限载(物理约束)、时间窗(服务质量)、限行政策(空间割裂)与突发扰动(动态重规划)完美揉合在了一起。
面对这类题目,拿奖的核心绝对不是强行写一个包含成千上万个变量的MILP整数规划去让求解器跑死。而是如同本文一样:在基础模型端用严密的微积分和分段函数做成本核算,在求解端用拆分配送与大邻域搜索(ALNS)进行组合寻优,在动态突发时运用滚动视界和扰动阻尼来保障方案的鲁棒性 。这不仅是比赛解题的最优路径,也是真正工业界智慧物流系统的核心底层逻辑!