单基地脉冲雷达工作原理
一、系统组成与信号流向
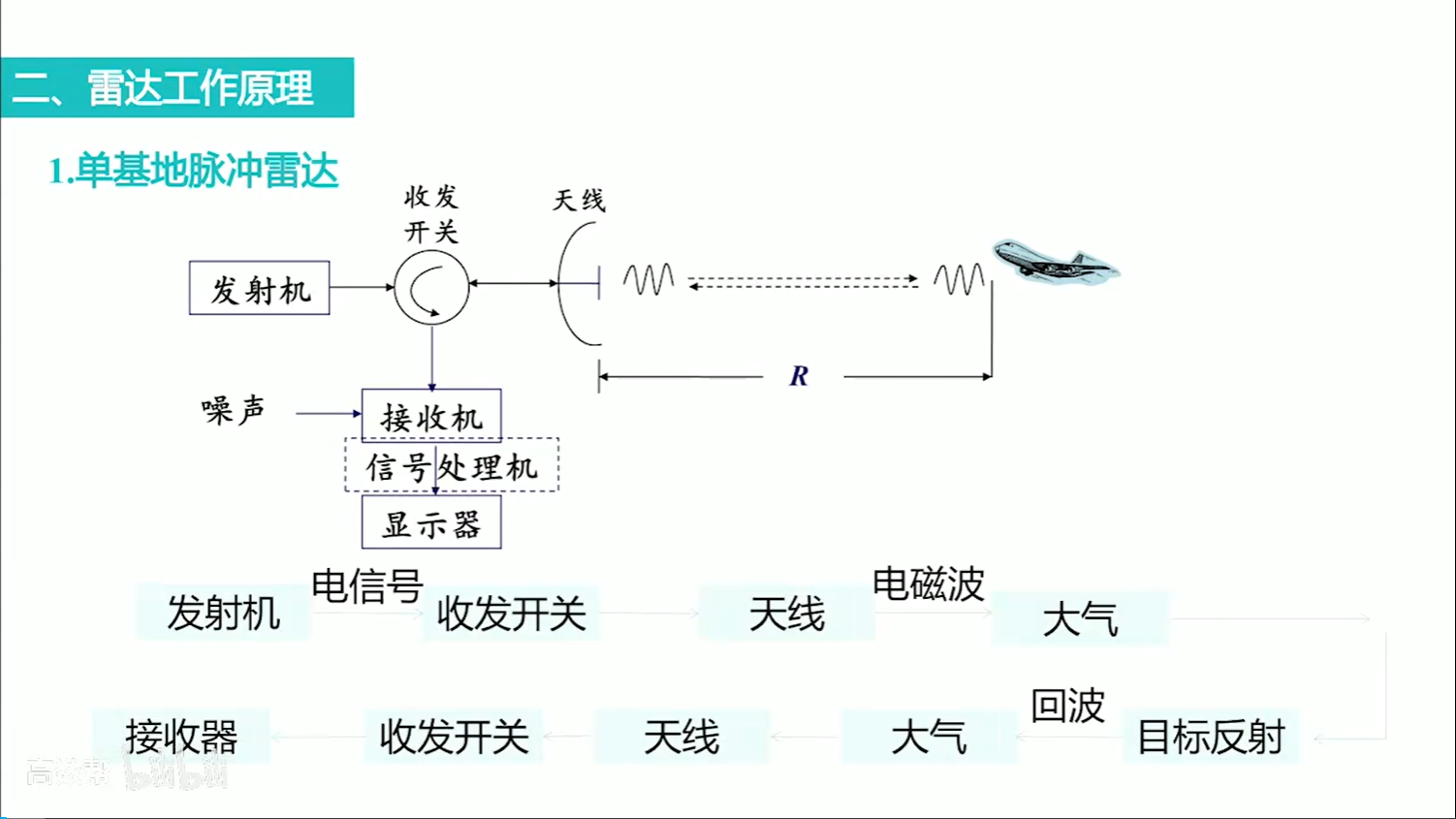
单基地脉冲雷达的核心特点是收发共用同一副天线,通过收发开关实现分时工作,避免发射信号直接烧毁接收机。
1. 发射链路(信号从雷达到目标)
发射机 → 收发开关 → 天线 → 大气传播 → 目标反射- 发射机:产生高频脉冲电信号(射频信号)
- 收发开关:发射时,将信号导向天线,同时断开接收机通路
- 天线:将电信号转换为电磁波,定向辐射到空间
- 大气传播:电磁波在大气中以光速传播,遇到目标后反射
2. 接收链路(信号从目标回雷达)
目标反射回波 → 大气传播 → 天线 → 收发开关 → 接收机 → 信号处理机 → 显示器- 天线:接收目标反射回来的微弱回波
- 收发开关:接收时,将天线信号导向接收机,同时断开发射机通路
- 接收机:放大、滤波微弱回波,抑制噪声和干扰
- 信号处理机:解算目标距离、速度、角度等参数
- 显示器:输出目标信息,供操作员查看
二、关键原理解读
-
距离测量
雷达通过测量电磁波往返时间 计算目标距离:
R=c⋅Δt2R = \frac{c \cdot \Delta t}{2}R=2c⋅Δt其中ccc为光速,Δt\Delta tΔt为发射脉冲与接收回波的时间差。
-
收发开关的作用
脉冲雷达发射功率很高(可达数千瓦),而回波信号极其微弱(纳瓦级)。收发开关通过分时工作,避免发射信号直接进入接收机造成损坏,同时保证回波信号能被正常接收。
-
噪声的影响
接收机自身会产生热噪声,限制了雷达的最小可检测信号强度,决定了雷达的灵敏度下限。
雷达检测目标的本质,是从背景噪声中识别出目标回波信号,** 信噪比(SNR)** 是衡量 "信号比噪声强多少" 的直接指标,决定了目标被可靠检测的概率。
- 发射机功率:会影响回波信号强度,但如果噪声同时增大,SNR 可能不会提升,因此不能单独决定检测能力。
- 噪声大小:噪声过大会淹没信号,但噪声本身不是检测能力的直接衡量标准,关键还是信号与噪声的比值。
- 接收机灵敏度:代表雷达能检测的最小信号强度,但最终能否检测目标,依然取决于该信号与噪声的比值。
单基地脉冲雷达各关键节点的信号波形与时间关系
一、信号波形逐行解析
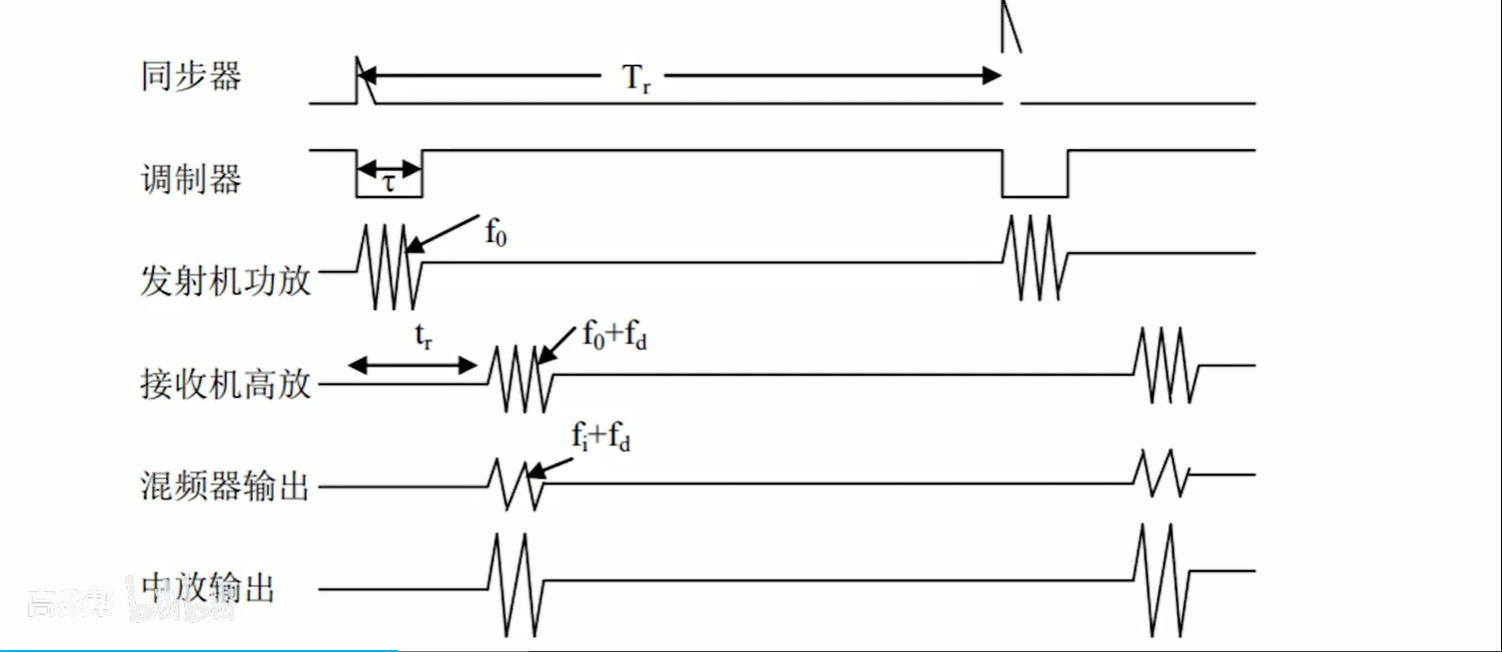
1. 同步器波形
- 表现:周期性的尖脉冲,周期为 TrT_rTr(脉冲重复周期)
- 作用:整个雷达系统的"时间基准",所有模块都以它为参考同步工作。
2. 调制器波形
- 表现:由同步脉冲触发,输出宽度为 τ\tauτ的矩形脉冲
- 作用:控制发射机的工作时长,决定了发射脉冲的宽度,直接影响雷达的距离分辨率。
3. 发射机功放输出波形
- 表现:受调制器控制的高频正弦脉冲,载波频率为 f0f_0f0
- 作用:将射频信号放大到足够功率,通过天线辐射出去,频率 f0f_0f0 就是雷达的工作频率。
4. 接收机高放输出波形
- 表现:延迟了 trt_rtr 时间的高频脉冲,频率变为 f0+fdf_0 + f_df0+fd
- 关键信息:
- trt_rtr:回波延迟时间,对应目标距离 R=c⋅tr2R = \frac{c \cdot t_r}{2}R=2c⋅tr
- fdf_dfd:多普勒频移,由目标径向运动产生,反映目标速度
5. 混频器输出波形
- 表现:中频脉冲信号,频率变为 fi+fdf_i + f_dfi+fd
- 作用:通过与本振信号混频,将高频回波信号下变频到中频 fif_ifi,便于后续放大和处理,同时保留多普勒信息。
6. 中放输出波形
- 表现:放大后的中频脉冲信号
- 作用:对中频信号进行放大和滤波,提高信噪比,为后续信号处理提供高质量的信号。
二、核心时间关系总结
- 同步器周期 TrT_rTr :决定了雷达的最大不模糊距离 Rmax=c⋅Tr2R_{\text{max}} = \frac{c \cdot T_r}{2}Rmax=2c⋅Tr。
- 调制器脉宽 τ\tauτ :决定了距离分辨率 ΔR=c⋅τ2\Delta R = \frac{c \cdot \tau}{2}ΔR=2c⋅τ,同时也决定了发射脉冲的能量。
- 回波延迟 trt_rtr:直接反映目标距离,是雷达测距的核心依据。
- 多普勒频移 fdf_dfd:叠加在载波频率上,混频后依然保留,是脉冲多普勒雷达测速的关键。
雷达方程
一、核心概念
雷达方程描述了雷达最大探测距离与雷达参数、目标特性之间的关系,是评估雷达探测能力的核心公式。
二、理想雷达方程(无损耗、无噪声)
1. 目标回波功率公式
Pr=PtGArσ(4π)2R4=PtG2λ2σ(4π)3R4 P_r = \frac{P_t G A_r \sigma}{(4\pi)^2 R^4} = \frac{P_t G^2 \lambda^2 \sigma}{(4\pi)^3 R^4} Pr=(4π)2R4PtGArσ=(4π)3R4PtG2λ2σ
其中天线有效面积与增益的关系为:
Ar=Gλ24π A_r = \frac{G \lambda^2}{4\pi} Ar=4πGλ2
2. 最大探测距离公式
当回波功率等于接收机灵敏度 PrminP_{r\text{min}}Prmin 时,雷达达到最大探测距离:
Rmax=(PtGArσ(4π)2Prmin)14=(PtG2λ2σ(4π)3Prmin)14 R_{\text{max}} = \left( \frac{P_t G A_r \sigma}{(4\pi)^2 P_{r\text{min}}} \right)^{\frac{1}{4}} = \left( \frac{P_t G^2 \lambda^2 \sigma}{(4\pi)^3 P_{r\text{min}}} \right)^{\frac{1}{4}} Rmax=((4π)2PrminPtGArσ)41=((4π)3PrminPtG2λ2σ)41
3. 参数说明
| 参数 | 物理意义 | 单位 |
|---|---|---|
| PtP_tPt | 发射脉冲功率 | W |
| GGG | 发射天线增益 | 倍 |
| ArA_rAr | 接收天线有效面积 | m² |
| λ\lambdaλ | 工作波长 | m |
| σ\sigmaσ | 目标雷达截面积(RCS) | m² |
| RRR | 雷达到目标的距离 | m |
| PrminP_{r\text{min}}Prmin | 接收机最小可检测信号功率(灵敏度) | W |
三、实际雷达方程(考虑噪声与损耗)
1. 关键修正项
- 噪声系数 FFF :描述接收机内部噪声对信噪比的恶化程度
F=NoNiGa=(SNR)i(SNR)o F = \frac{N_o}{N_i G_a} = \frac{(SNR)_i}{(SNR)_o} F=NiGaNo=(SNR)o(SNR)i - 系统损耗 LLL:包括发射/接收链路、大气传播、天线馈线等损耗
- 热噪声功率 :N=kToBN = k T_o BN=kToB,其中 kkk 为玻尔兹曼常数,ToT_oTo为等效噪声温度,BBB 为接收机带宽
2. 实际最大探测距离公式
Rmax=PtG2σλ2Ar(4π)3kToBFL(SNR)omin14 R_{\text{max}} = \left \\frac{P_t G\^2 \\sigma \\lambda\^2 A_r}{(4\\pi)\^3 k T_o B F L (SNR)_{o\\text{min}}} \\right^{\frac{1}{4}} Rmax=(4π)3kToBFL(SNR)ominPtG2σλ2Ar41
四、核心规律解读
- 四次方根关系 :雷达最大探测距离与发射功率、天线增益、目标RCS等参数的四次方根成正比。例如,要将探测距离翻倍,发射功率需要提升16倍。
- 波长的影响:在理想模型中,探测距离与波长的平方根成正比,因此低频段雷达(波长更长)天生具有更远的探测距离。
- 噪声与损耗的影响:实际工程中,噪声系数和系统损耗会显著降低雷达的探测性能,因此接收机设计和链路优化至关重要。
雷达方程本质上描述了电磁波能量的往返传播过程:
- 发射机的功率经天线增益后辐射出去,能量随距离平方衰减;
- 目标将能量散射回雷达,散射能力由RCS决定;
- 回波再次随距离平方衰减,被接收天线捕获;
- 最终能被检测到的信号功率,必须超过接收机噪声基底,才能被识别为目标。
雷达发射机核心知识点(任务、指标与信号特性)
一、发射机的核心任务与组成
1. 核心任务
产生**大功率、指定调制特性(振幅/相位)**的电磁波,为雷达提供探测所需的射频信号。
2. 基本组成方式
- 单级振荡式 :大功率振荡和调制一次完成,直接形成大功率射频信号。
- 特点:结构简单、成本低,但频率/相位稳定性差,仅适用于非相参雷达。
- 主振放大式 :先由主控振荡器产生小功率信号,再经多级放大链放大。
- 特点:信号相参性好、波形灵活,是现代相参雷达(PD/SAR)的主流方案。
二、发射机的主要质量指标
1. 工作频率/波段
决定雷达的基础工作频段,影响探测距离、分辨率和抗干扰能力。
2. 输出功率
-
峰值功率 PtP_tPt:脉冲期间的瞬时功率
-
平均功率 PavP_{av}Pav :单位时间内的平均功率,公式:
Pav=Pt×τTrP_{av} = P_t \times \frac{\tau}{T_r}Pav=Pt×Trτ其中 τ\tauτ 为脉冲宽度,TrT_rTr 为脉冲重复周期。
-
例题1解析 :
Pt=200 kW,τ=1 μs,Tr=200 μsP_t=200\ \text{kW}, \tau=1\ \mu\text{s}, T_r=200\ \mu\text{s}Pt=200 kW,τ=1 μs,Tr=200 μs
Pav=200×103×1×10−6200×10−6=1000 WP_{av} = 200\times10^3 \times \frac{1\times10^{-6}}{200\times10^{-6}} = 1000\ \text{W}Pav=200×103×200×10−61×10−6=1000 W
3. 总效率 η\etaη
定义为输出平均功率与输入总功率的比值:
η=Pav∑Pi\eta = \frac{P_{av}}{\sum P_i}η=∑PiPav
- 例题2解析 :
输入功率:220 V×15 A+28 V×20 A=3860 W220\ \text{V} \times 15\ \text{A} + 28\ \text{V} \times 20\ \text{A} = 3860\ \text{W}220 V×15 A+28 V×20 A=3860 W
η=10003860≈25.9%\eta = \frac{1000}{3860} \approx 25.9\%η=38601000≈25.9%
4. 信号形式分类
| 调制类型 | 具体形式 | 应用特点 |
|---|---|---|
| 振幅调制 | 脉冲、连续波 | 脉冲雷达用脉冲调制,连续波雷达用恒幅调制 |
| 载频调制 | 单载频、频率捷变、线性调频、频率分集、频率编码 | 线性调频用于脉冲压缩;频率捷变用于抗干扰 |
| 相位调制 | 随机相位、稳定相位、相位编码 | 相位编码用于脉冲压缩和抗干扰 |
三、信号稳定性指标(关键!)
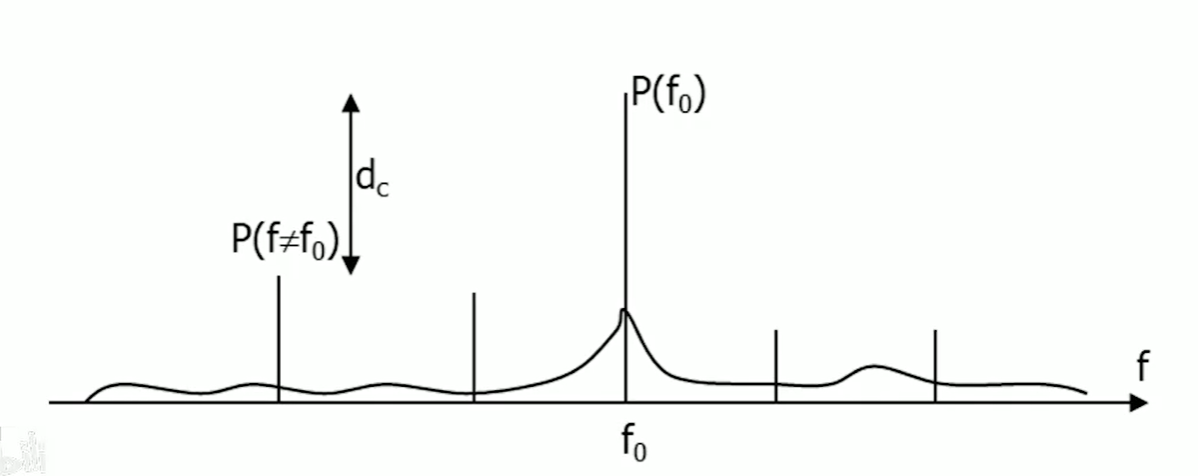
1. 周期性不稳:杂散抑制
衡量发射信号频谱中,主信号与杂散分量的比值,定义为:
dc=10lg(P(f0)Pmax(f≠f0))(dB)d_c = 10\lg\left(\frac{P(f_0)}{P_{\max}(f\neq f_0)}\right) \quad (\text{dB})dc=10lg(Pmax(f=f0)P(f0))(dB)
- 杂散分量会在接收端产生虚假目标,因此需要通过滤波、屏蔽等方式抑制。
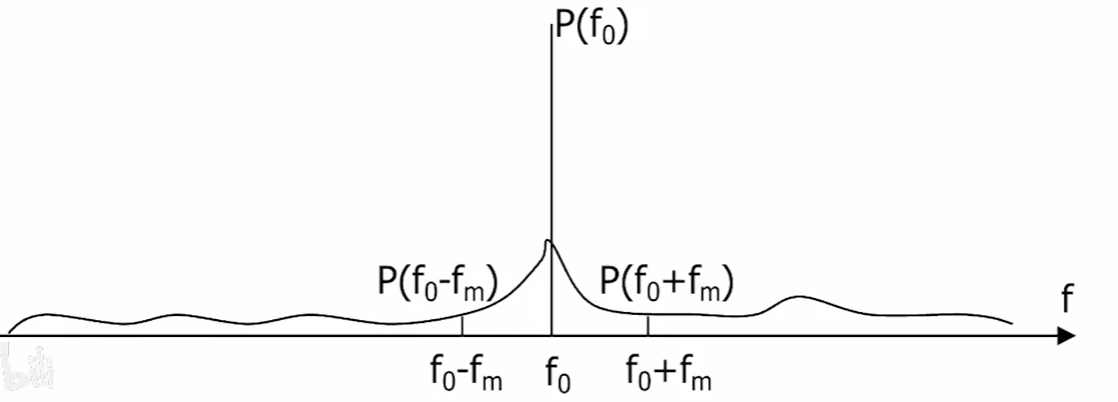
2. 随机性不稳:相位噪声
衡量载波信号的随机相位波动,定义为:
L(fm)=10lg(P(f0±fm)P(f0)×ΔB)(dBc/Hz)L(f_m) = 10\lg\left(\frac{P(f_0\pm f_m)}{P(f_0)\times \Delta B}\right) \quad (\text{dBc/Hz})L(fm)=10lg(P(f0)×ΔBP(f0±fm))(dBc/Hz)
- 相位噪声会导致目标回波的多普勒频谱展宽,降低测速精度和动目标检测性能,是相参雷达的关键指标。
四、核心考点总结
- 发射机的两个核心指标是平均功率 和效率 ,计算时关键在于占空比 τ/Tr\tau/T_rτ/Tr。
- 单级振荡式与主振放大式的核心区别在于信号相参性,后者是现代雷达的主流。
- 杂散抑制和相位噪声直接影响雷达的目标检测与测速性能,是工程设计的重点。
雷达接收机:动态范围、增益控制与滤波技术
一、动态范围(DR)
动态范围是接收机处理不同强度信号的能力上限,核心定义与分类如下:
1. 定义与公式
D (dB)=10lg(PimaxPimin)D\ (\text{dB}) = 10\lg\left(\frac{P_{i\max}}{P_{i\min}}\right)D (dB)=10lg(PiminPimax)
- PimaxP_{i\max}Pimax:接收机不饱和的最大输入信号功率
- PiminP_{i\min}Pimin:满足检测要求的最小输入信号功率(灵敏度)
2. 分类
| 类型 | 特点 | 适用场景 |
|---|---|---|
| 工作动态范围 | 允许通过增益控制调整最大输入信号 | 雷达全工作周期,处理远近目标 |
| 瞬时动态范围 | 同一时刻、同一增益状态下的最大输入信号 | 单次回波接收,限制放大器饱和 |
3. 需求来源
- 目标距离远近不同,回波功率随1/R41/R^41/R4衰减
- 目标RCS大小和起伏差异大
- 信号处理需要输入信号落在合适的线性范围内
二、增益控制(AGC)
增益控制是解决动态范围限制的关键技术,其中自动增益控制(AGC)应用最广。
1. 核心指标
- 控制范围:典型80-100dB,覆盖强弱信号差异
- 响应时间:秒级,适合慢变化的目标信号
- 控制特性曲线:输入信号强度与输出增益的关系
2. AGC工作流程
中放 → 包络检波 → 视放 → 波门选通 → 峰值检波 → 低通滤波 → 反馈控制中放增益- 特点:通过反馈环路自动调整中放增益,使输出信号幅度稳定,广泛用于自动跟踪雷达系统。
三、滤波与接收机带宽
1. 匹配滤波
- 定义 :满足最大信噪比准则的滤波器,是雷达信号处理的核心技术。
- 特性 :白噪声背景下,匹配滤波器的频率响应为:
H(ω)=S∗(ω)e−jωt0H(\omega) = S^*(\omega)e^{-j\omega t_0}H(ω)=S∗(ω)e−jωt0
即滤波器频率响应是输入信号频谱的共轭,能在特定时刻实现信噪比最大化。
2. 准匹配滤波
- 定义:用物理可实现的滤波器逼近理想匹配滤波器,称为准匹配滤波。
- 工程意义:理想匹配滤波器无法实现,实际中用近似的带通滤波器(如升余弦滤波器)替代,在可实现性与性能之间取得平衡。
四、核心考点总结
- 动态范围与AGC的关系:AGC通过调整增益,有效扩展了雷达的工作动态范围,是接收机处理大强度差异回波的必备手段。
- 匹配滤波的物理意义:通过信号与滤波器的共轭匹配,将回波能量集中到一个峰值上,最大化信噪比,是脉冲压缩雷达的关键。
- 工程实现:实际雷达中均采用准匹配滤波,在保证性能的同时,解决理想滤波器的物理可实现问题。
雷达最小可检测信号
一、基本雷达方程
雷达方程描述了雷达作用距离与系统参数、目标特性的关系,是评估雷达性能的核心公式。
1. 目标回波功率公式
Pr=PtGArσ(4π)2R4=PtG2λ2σ(4π)3R4P_r = \frac{P_t G A_r \sigma}{(4\pi)^2 R^4} = \frac{P_t G^2 \lambda^2 \sigma}{(4\pi)^3 R^4}Pr=(4π)2R4PtGArσ=(4π)3R4PtG2λ2σ
其中天线有效面积与增益的关系为:
Ar=Gλ24πA_r = \frac{G \lambda^2}{4\pi}Ar=4πGλ2
2. 最大作用距离公式
当回波功率等于接收机最小可检测信号 Si,minS_{i,\min}Si,min 时,雷达达到最大探测距离:
Rmax=(PtGArσ(4π)2Si,min)14=(PtG2λ2σ(4π)3Si,min)14R_{\max} = \left( \frac{P_t G A_r \sigma}{(4\pi)^2 S_{i,\min}} \right)^{\frac{1}{4}} = \left( \frac{P_t G^2 \lambda^2 \sigma}{(4\pi)^3 S_{i,\min}} \right)^{\frac{1}{4}}Rmax=((4π)2Si,minPtGArσ)41=((4π)3Si,minPtG2λ2σ)41
二、最小可检测信噪比(D0D_0D0)
定义:在满足虚警概率 PfaP_{fa}Pfa 和发现概率PdP_dPd 要求时,接收机输出端单个脉冲检测所需的最小信噪比:
D0=M=(SoNo)min∣Pfa=常数,Pd=常数D_0 = M = \left. \left( \frac{S_o}{N_o} \right){\min} \right|{P_{fa}=\text{常数}, P_d=\text{常数}}D0=M=(NoSo)min Pfa=常数,Pd=常数
它是衡量雷达检测能力的关键指标,直接影响雷达方程中的 Si,minS_{i,\min}Si,min。
三、门限检测与检测性能
1. 判决结果的四种情况
| 判决结果 | 定义 | 概率 |
|---|---|---|
| 虚警 | 无目标被判为有目标 | PfaP_{fa}Pfa |
| 漏警 | 有目标被判为无目标 | 1−Pd1-P_d1−Pd |
| 发现(检测) | 有目标被判为有目标 | PdP_dPd |
| 正确拒绝 | 无目标被判为无目标 | 1−Pfa1-P_{fa}1−Pfa |
2. 纽曼-皮尔逊(N-P)准则
为解决虚警与检测概率的矛盾,N-P准则要求:在满足虚警概率 PfaP_{fa}Pfa 要求的前提下,使检测概率 PdP_dPd 最大化,这也是恒虚警(CFAR)检测的理论基础。
- 白噪声背景下,虚警概率与检测门限的关系:
Pfa=e−VT22σ2P_{fa} = e^{-\frac{V_T^2}{2\sigma^2}}Pfa=e−2σ2VT2
反解可得检测门限:
VT=σ−2lnPfaV_T = \sigma\sqrt{-2\ln P_{fa}}VT=σ−2lnPfa - 结论:对于给定的 PfaP_{fa}Pfa,检测概率 PdP_dPd 仅是信噪比 S/NS/NS/N 的函数,信噪比越高,检测概率越大。
CFAR(恒虚警率)检测原理
在雷达信号处理中,CFAR(Constant False Alarm Rate,恒虚警率)检测是在背景噪声/杂波变化时,维持虚警概率稳定的关键技术。
一、为什么需要 CFAR?
常规的固定门限检测有一个致命缺陷:
- 当背景噪声/杂波强度变化时(如海面杂波、雨杂波、地杂波),固定门限要么导致虚警率飙升 (噪声增大时,噪声超过门限被判为目标),要么导致检测概率下降(噪声减小时,门限过高漏检目标)。
CFAR的核心目标:在变化的背景中,自动调整检测门限,始终保持虚警概率 PfaP_{fa}Pfa 恒定。
二、CFAR 的核心思想:"用周围估计背景"
CFAR 检测的本质是:
- 对于待检测单元(CUT,Cell Under Test),用它周围的参考单元估计背景噪声/杂波的功率;
- 基于估计的背景功率,按设定的虚警概率计算动态门限;
- 比较待检测单元的信号与动态门限,高于门限判为目标。
最基础、最经典的是 单元平均 CFAR(CA-CFAR),我们以它为例说明。
三、单元平均 CFAR(CA-CFAR)工作流程
1. 滑动窗口结构
以雷达的距离单元为例,滑动窗口包含:
- 1个待检测单元(CUT):当前需要判断是否有目标的单元;
- 保护单元(Guard Cells):紧邻CUT的单元,用于防止目标能量泄漏到参考单元,导致背景估计偏高;
- 参考单元(Reference Cells):保护单元两侧的N个单元,用于估计背景噪声/杂波的平均功率。
2. 背景功率估计
计算所有参考单元的功率平均值:
σ^2=1N∑i=1Nxi\hat{\sigma}^2 = \frac{1}{N} \sum_{i=1}^{N} x_iσ^2=N1i=1∑Nxi
其中 xix_ixi 为参考单元的功率,NNN 为参考单元数量。
3. 动态门限计算
基于背景估计值和设定的虚警概率 PfaP_{fa}Pfa,计算检测门限:
VT=α⋅σ^2V_T = \alpha \cdot \hat{\sigma}^2VT=α⋅σ^2
其中 α\alphaα 是由 PfaP_{fa}Pfa 和参考单元数 NNN 决定的门限因子,满足:
Pfa=(11+α)NP_{fa} = \left( \frac{1}{1+\alpha} \right)^NPfa=(1+α1)N
4. 目标判决
若待检测单元的功率 xCUT>VTx_{CUT} > V_TxCUT>VT,则判为有目标;否则判为无目标。
四、常见的 CFAR 改进算法
CA-CFAR 在均匀噪声背景下性能很好,但在非均匀背景中(如杂波边缘、多目标干扰)会失效,因此衍生出多种改进算法:
| 算法 | 核心改进 | 适用场景 |
|---|---|---|
| GO-CFAR(选大CFAR) | 分别计算左右参考单元的平均功率,取较大值估计背景 | 杂波边缘场景,防止门限过低导致虚警 |
| SO-CFAR(选小CFAR) | 分别计算左右参考单元的平均功率,取较小值估计背景 | 多目标场景,防止目标泄漏导致背景估计偏高、漏检目标 |
| OS-CFAR(有序统计CFAR) | 对参考单元功率排序,取第k个值作为背景估计 | 多目标和杂波边缘场景,鲁棒性更强 |
四、脉冲积累技术
脉冲积累是提高雷达检测性能的关键技术,通过对多个回波信号求和来提升信噪比。
1. 定义与分类
- 脉冲积累 :将同一距离单元的 nnn 个回波信号求和,再进行检测,数学表达式为:
y(t)=∑i=0n−1x(t−iTr)y(t) = \sum_{i=0}^{n-1} x(t-iT_r)y(t)=i=0∑n−1x(t−iTr)
分为:- 中频积累(相参/线性积累) :在中频阶段对信号进行同相相加,理想情况下,MMM 个脉冲可使信噪比提高 MMM 倍。
- 视频积累(非相参/非线性积累) :在视频阶段对信号包络进行相加,理想情况下,信噪比改善为 M∼M\sqrt{M} \sim MM ∼M 倍之间。
2. 积累脉冲数的确定
积累脉冲数 nnn由波束驻留时间和脉冲重复频率决定:
n=Tsfrn = T_s f_rn=Tsfr
其中 Ts=min(TSA,TSR)T_s = \min(T_{SA}, T_{SR})Ts=min(TSA,TSR),TSAT_{SA}TSA为波束在目标方向的驻留时间,TSRT_{SR}TSR 为目标在距离分辨单元的驻留时间。
- 机械扫描雷达波束驻留时间:
TSA=α0.5ΩαcosβT_{SA} = \frac{\alpha_{0.5}}{\Omega_\alpha \cos\beta}TSA=Ωαcosβα0.5 - 目标径向运动导致的驻留时间:
TSR=ΔRVrT_{SR} = \frac{\Delta R}{V_r}TSR=VrΔR
五、雷达方程拓展与例题解析
1. 单基地雷达方程例题
题目 :某雷达波长 λ=0.03 m\lambda=0.03\ \text{m}λ=0.03 m,Pt=2 MWP_t=2\ \text{MW}Pt=2 MW,G=5000G=5000G=5000,最小可检测信号 Si,min=0.05 pWS_{i,\min}=0.05\ \text{pW}Si,min=0.05 pW,目标RCS σ=10 m2\sigma=10\ \text{m}^2σ=10 m2。
- 求最大作用距离 RmaxR_{\max}Rmax
- 10个相参脉冲积累,作用距离不变时,发射功率可降低为多少?
解答:
- 代入单基地雷达方程:
Rmax=(2×106×50002×0.032×10(4π)3×0.05×10−12)14≈260 kmR_{\max} = \left( \frac{2\times10^6 \times 5000^2 \times 0.03^2 \times 10}{(4\pi)^3 \times 0.05\times10^{-12}} \right)^{\frac{1}{4}} \approx 260\ \text{km}Rmax=((4π)3×0.05×10−122×106×50002×0.032×10)41≈260 km - 相参积累使信噪比提高10倍,作用距离与信噪比的四次方根成正比,因此发射功率可降为原来的 (1/10),即 (P_t' = 200\ \text{kW})。
2. 二次雷达方程与例题
二次雷达通过目标上的应答机协同工作,作用距离取收发链路的最小值:
Rmax=min{Rmax1,Rmax2}R_{\max} = \min\{R_{\max1}, R_{\max2}\}Rmax=min{Rmax1,Rmax2}
其中收发链路的作用距离分别为:
Rmax1=(Pt2Gr1Gt2λ2(4π)2L1Si,min1)12,Rmax2=(Pt1Gr2Gt1λ2(4π)2L2Si,min2)12R_{\max1} = \left( \frac{P_{t2} G_{r1} G_{t2} \lambda^2}{(4\pi)^2 L_1 S_{i,\min1}} \right)^{\frac{1}{2}}, \quad R_{\max2} = \left( \frac{P_{t1} G_{r2} G_{t1} \lambda^2}{(4\pi)^2 L_2 S_{i,\min2}} \right)^{\frac{1}{2}}Rmax1=((4π)2L1Si,min1Pt2Gr1Gt2λ2)21,Rmax2=((4π)2L2Si,min2Pt1Gr2Gt1λ2)21
双基地雷达方程
1. 什么是双基地雷达?
与收发同地的单基地雷达不同,双基地雷达的发射机和接收机位于不同位置,目标被照射后,回波信号被远处的接收机接收。这种体制的优势包括:
- 抗干扰能力强(发射机可隐蔽,接收机无源工作)
- 反隐身性能好(利用目标的非后向散射特性)
- 可实现远距离探测
2. 核心公式解析
(1)接收信号功率公式
Pr=PtGtGrσλ2(4π)3LR12R22P_r = \frac{P_t G_t G_r \sigma \lambda^2}{(4\pi)^3 L R_1^2 R_2^2}Pr=(4π)3LR12R22PtGtGrσλ2
| 参数 | 物理意义 |
|---|---|
| PtP_tPt | 发射机功率 |
| GtG_tGt | 发射天线增益 |
| GrG_rGr | 接收天线增益 |
| σ\sigmaσ | 目标的雷达截面积(RCS) |
| λ\lambdaλ | 雷达工作波长 |
| LLL | 系统损耗(包括大气衰减、馈线损耗等) |
| R1R_1R1 | 发射机到目标的距离 |
| R2R_2R2 | 目标到接收机的距离 |
关键区别 :单基地雷达的回波功率与 R4R^4R4 成反比,而双基地雷达与 R12R22R_1^2 R_2^2R12R22 成反比,能量随两段路径衰减。
(2)最大作用距离公式
当回波功率等于接收机灵敏度 Si,minS_{i,\min}Si,min 时,雷达达到最大探测能力:
(R1R2)max=(PtGtGrσλ2(4π)3LSi,min)12(R_1 R_2){\max} = \left( \frac{P_t G_t G_r \sigma \lambda^2}{(4\pi)^3 L S{i,\min}} \right)^{\frac{1}{2}}(R1R2)max=((4π)3LSi,minPtGtGrσλ2)21
这个公式给出了收发路径乘积 的最大值。也就是说,只要 R1×R2R_1 \times R_2R1×R2 不超过该值,目标就能被检测到。
3. 适用条件与示意图
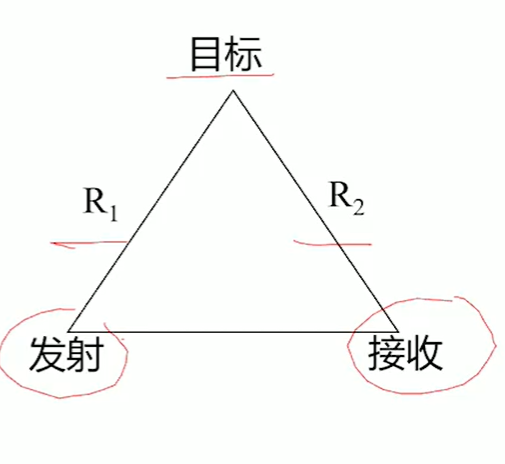
公式的适用前提是:发射天线和接收天线均对准目标 。
图中的三角形直观展示了三者的几何关系:
- 顶点为目标
- 底边两端分别为发射机和接收机
- R1R_1R1、R2R_2R2 为两段路径
4. 与单基地雷达的对比
| 对比维度 | 单基地雷达 | 双基地雷达 |
|---|---|---|
| 收发位置 | 同地 | 异地 |
| 回波功率衰减 | R−4R^{-4}R−4 | (R1R2)−2(R_1 R_2)^{-2}(R1R2)−2 |
| 抗干扰能力 | 弱(发射机易被定位) | 强(接收机无源工作) |
| 目标散射特性 | 后向散射 | 双基地散射(非后向) |
目标雷达截面积(RCS)
雷达截面积(RCS,Radar Cross Section)是衡量目标反射电磁波能力的核心指标,直接决定雷达对目标的探测距离。
一、RCS 的物理定义
RCS 描述目标将入射雷达波向接收方向散射的能力,定义式为:
σ=4πR2S2S1\sigma = 4\pi R^2 \frac{S_2}{S_1}σ=4πR2S1S2
其中:
- S1S_1S1:入射电磁波的功率密度;
- S2S_2S2:距离目标 (R) 处的散射电磁波功率密度;
- RRR:目标到接收点的距离。
也可通过散射功率表示:σ=P2S1\sigma = \frac{P_2}{S_1}σ=S1P2,其中 P2P_2P2 为目标散射的总功率。
二、RCS 的标准球测量法
工程中常用标准金属球法测量目标 RCS,步骤如下:
-
测量标准球回波功率
已知标准金属球的 RCS 为 σ0\sigma_0σ0,在距离 RRR 处测量其回波功率:
Pr0=PtG2λ2σ0(4π)3R4P_{r0} = \frac{P_t G^2 \lambda^2 \sigma_0}{(4\pi)^3 R^4}Pr0=(4π)3R4PtG2λ2σ0标准球通常采用镀金/银的金属球,其 RCS 可精确计算。
-
测量目标回波功率
在相同条件下,测量目标在距离 R1R_1R1 处的回波功率:
Pr1=PtG2λ2σ(4π)3R14P_{r1} = \frac{P_t G^2 \lambda^2 \sigma}{(4\pi)^3 R_1^4}Pr1=(4π)3R14PtG2λ2σ尽量使 R=R1R=R_1R=R1,以降低大气衰减差异的影响。
-
计算目标 RCS
联立两式消去雷达参数,可得:
σ=σ0⋅Pr1Pr0⋅(RR1)4\sigma = \sigma_0 \cdot \frac{P_{r1}}{P_{r0}} \cdot \left( \frac{R}{R_1} \right)^4σ=σ0⋅Pr0Pr1⋅(R1R)4
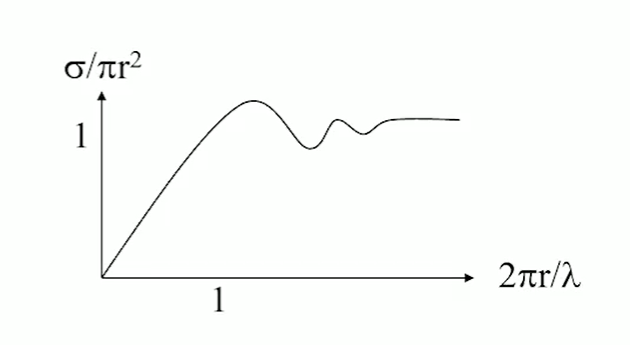
三、RCS 与波长的关系(目标散射分区)
以半径为 rrr 的金属球为例,RCS 随目标尺寸与波长的比值 2πr/λ2\pi r/\lambda2πr/λ 变化,分为三个区域:
| 区域 | 条件 | RCS 特性 | 物理本质 |
|---|---|---|---|
| 瑞利区 | r≪λr \ll \lambdar≪λ | σ≪πr2\sigma \ll \pi r^2σ≪πr2,与 r6/λ4r^6/\lambda^4r6/λ4 成正比 | 目标尺寸远小于波长,散射极弱,呈透射状态 |
| 谐振区 | r≈λr \approx \lambdar≈λ | σ≈πr2\sigma \approx \pi r^2σ≈πr2,随频率剧烈振荡 | 目标尺寸与波长相当,产生谐振散射(如半波长箔条干扰) |
| 光学区 | r≫λr \gg \lambdar≫λ | σ=πr2\sigma = \pi r^2σ=πr2,基本稳定 | 目标尺寸远大于波长,散射以镜面反射为主,特性稳定 |
雷达系统损耗与传播效应
雷达系统的实际作用距离远小于理论值,核心原因是各类系统损耗与传播效应。
一、系统内部损耗
这些损耗发生在雷达系统内部,直接降低发射功率和接收信号强度,总损耗为各类损耗的dB值之和:L(dB)=∑Li(dB)L(\text{dB}) = \sum L_i(\text{dB})L(dB)=∑Li(dB)。
| 损耗类型 | 成因 | 典型场景 |
|---|---|---|
| 射频传输损耗 | 信号在传输线、开关、旋转关节、波导中的衰减 | 机械扫描雷达的旋转关节损耗、高频段波导损耗 |
| 天线波束形状损耗 | 目标不在波束中心时,天线增益低于最大值 | 扫描雷达边缘波束的目标探测 |
| 叠加损耗 | 脉冲积累中部分回波不含目标信号 | 目标穿越波束时的部分脉冲丢失 |
| 设备不完善损耗 | 匹配滤波不理想、时频漂移、采样边缘化 | 接收机滤波器非理想特性导致的信噪比损失 |
对雷达方程的影响 :系统损耗直接引入雷达方程,修正后的作用距离公式为:
Rmax=(PtG2σλ2(4π)3Si,min⋅100.1L)14R_{\max} = \left( \frac{P_t G^2 \sigma \lambda^2}{(4\pi)^3 S_{i,\min} \cdot 10^{0.1L}} \right)^{\frac{1}{4}}Rmax=((4π)3Si,min⋅100.1LPtG2σλ2)41
其中 LLL 为系统总损耗(dB)。
二、大气传播影响
电磁波在大气中传播时,会因气体吸收和气象条件产生衰减,是影响远程雷达性能的关键因素。
1. 大气衰减的成因与特点
- 主要由水蒸气和氧气的吸收作用引起,衰减量与频率、仰角、气象条件密切相关。
- 频率越高,衰减越大:40GHz以下氧气衰减较平缓,100GHz附近存在"传播窗";远程雷达通常选用较低频率以降低衰减。
- 需通过查表获取晴天/雨雾天的单程衰减系数 δ\deltaδ(dB/km),再对雷达作用距离进行修正。
2. 作用距离修正方法
- 先计算无衰减时的理论作用距离 RmaxR_{\max}Rmax;
- 根据大气衰减系数和传播距离,计算总衰减量,再通过查表得到修正后的实际作用距离 Rmax′R'_{\max}Rmax′。
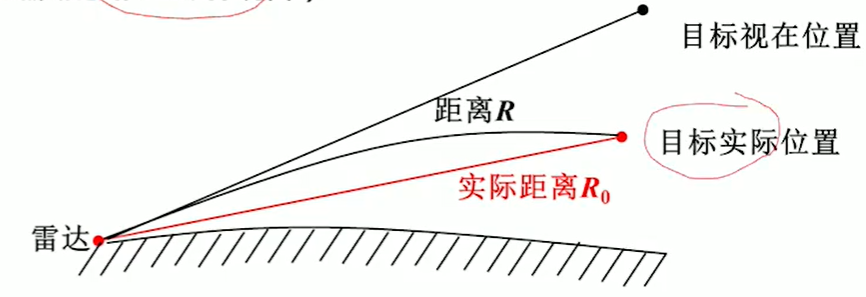
三、大气折射与雷达直视距离
地球曲率和大气折射共同限制了雷达的视线传播距离,这是地面雷达探测低空目标的主要瓶颈。
1. 大气折射的影响
大气密度不均匀,使电磁波向地表弯曲,等效于"增大"了地球半径。考虑大气折射后,等效地球半径为 R=8490 kmR=8490\ \text{km}R=8490 km(约为真实半径的4/3倍)。
2. 直视距离公式
雷达直视距离由雷达天线高度 hah_aha 和目标高度 hth_tht 决定,公式为:
RS=Ra+Rt≈4.12(ha(m)+ht(m)) kmR_S = R_a + R_t \approx 4.12\left( \sqrt{h_a(\text{m})} + \sqrt{h_t(\text{m})} \right) \ \text{km}RS=Ra+Rt≈4.12(ha(m) +ht(m) ) km
其中 RaR_aRa 为雷达地平线距离,RtR_tRt 为目标地平线距离。
四、地面/水面反射与多径效应
当雷达主瓣打地(仰角较小)且表面粗糙度 <λ/8<\lambda/8<λ/8 时,镜面反射会产生多径效应,严重影响目标回波强度。
1. 多径路程差分析
直接波与反射波的路程差近似为:
ΔR≈2hahtR\Delta R \approx \frac{2h_a h_t}{R}ΔR≈R2haht
其中 hah_aha 为雷达高度,hth_tht 为目标高度,RRR 为目标距离。
2. 对作用距离的影响
多径效应会使目标回波强度随距离起伏,修正后的雷达方程为:
Rmax=2(PtG2σλ2(4π)3100.1LSi,min)18×(πhahtλ)12×10−0.2δRR_{\max} = 2\left( \frac{P_t G^2 \sigma \lambda^2}{(4\pi)^3 10^{0.1L} S_{i,\min}} \right)^{\frac{1}{8}} \times \left( \frac{\pi h_a h_t}{\lambda} \right)^{\frac{1}{2}} \times 10^{-0.2\delta R}Rmax=2((4π)3100.1LSi,minPtG2σλ2)81×(λπhaht)21×10−0.2δR
在某些距离点上,多径干涉会使回波增强,作用距离提升;而在另一些点上会形成"零深",导致目标丢失。
3. 多径效应的解决方法
- 采用垂直极化波,减小镜面反射强度;
- 选用较高频率,使表面粗糙度条件不满足,避免镜面反射;
- 提高雷达或目标高度,增大仰角,减少主瓣打地的概率。
脉冲测距技术
脉冲测距是雷达最基础的测距方式,核心原理是通过测量电磁波往返目标的时间,计算目标距离。
一、雷达测距的基本原理
1. 测距的本质:给电磁波"打标记"
单载频连续波雷达无法测距,因为其信号带宽过窄,无法区分发射时间和回波时间。根据傅里叶变换原理:
- 要测量传输时间,必须在信号上加入尖锐的定时标志;
- 定时标志越尖锐,信号频谱越宽,测距精度越高。
脉冲雷达通过发射短脉冲实现这一目标:脉冲相当于电磁波的"时间戳",通过测量发射脉冲与回波脉冲的时间差,即可计算目标距离。
2. 测距公式
目标距离 RRR 与往返时间 trt_rtr 的关系为:
R=ctr2R = \frac{ct_r}{2}R=2ctr
其中 ccc 为电磁波传播速度(约 3×108 m/s3\times10^8\ \text{m/s}3×108 m/s),除以2是因为电磁波经历了"发射-目标反射-接收"的往返过程。
二、脉冲测距的实现方法
1. 三种调制方式
| 调制方式 | 实现原理 | 典型应用 |
|---|---|---|
| 调幅(脉冲法) | 发射矩形脉冲信号,通过测量脉冲回波延迟时间测距 | 常规脉冲雷达 |
| 调频(频率法) | 发射线性调频信号,通过频率差计算延迟时间 | 调频连续波(FMCW)雷达 |
| 调相(相位法) | 对信号进行相位调制,通过相位差测量延迟 | 高精度测距雷达 |
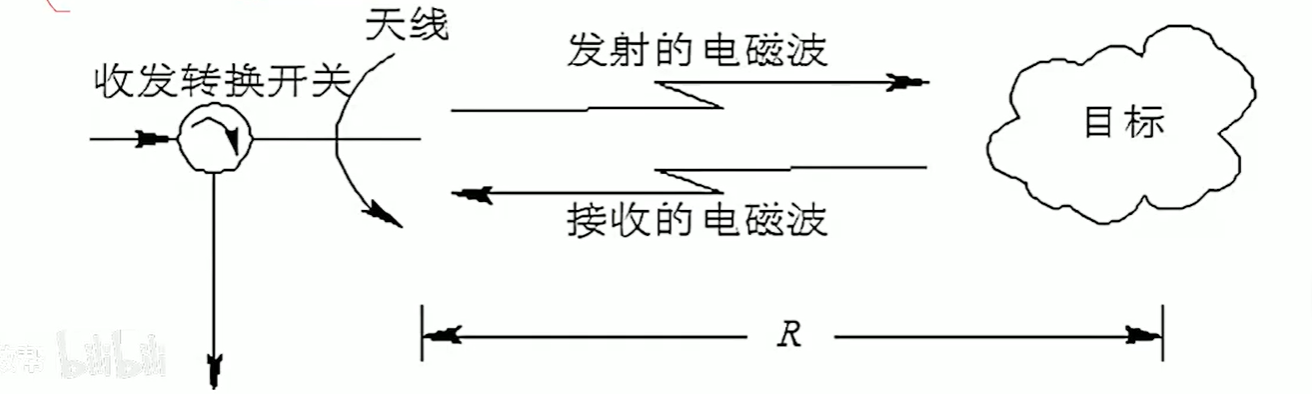
2. 脉冲雷达的工作流程
常规脉冲雷达按一定重复周期(PRI)发射单载频矩形脉冲,收发转换开关控制天线分时工作:
- 发射阶段:天线发射高功率脉冲信号;
- 接收阶段:天线接收目标回波信号;
- 信号处理:通过包络检波、门限检测提取回波延迟时间。
3. 回波到达时刻的测量方法
回波脉冲的到达时刻直接影响测距精度,常用两种测量方式:
- 前沿测量法:以回波包络过门限的时刻作为到达时刻,实现简单,但易受波形畸变和噪声影响,精度较低;
- 中值测量法:通过微分-过零点检测,以回波包络的中心时刻作为到达时刻,抗噪声和波形畸变能力强,精度更高。
三、影响测距精度的因素
测距误差分为系统误差和随机误差,由距离公式 R=ctr2R = \frac{ct_r}{2}R=2ctr可推导出误差公式:
ΔR=c2Δtr+RcΔc\Delta R = \frac{c}{2}\Delta t_r + \frac{R}{c}\Delta cΔR=2cΔtr+cRΔc
1. 系统误差
- 电磁波传播速度变化:由大气折射、温度湿度变化引起,导致传播路径弯曲或速度改变;
- 测量原理缺陷:如脉冲前沿畸变、门限设置偏差;
- 设备固有误差:收发转换开关延迟、时钟频率漂移等。
2. 随机误差
由噪声干扰、目标起伏、气象条件变化等偶然因素引起,即使消除系统误差,多次测量仍会存在误差。
四、距离分辨力与测距范围
1. 距离分辨力
指雷达区分两个相邻目标的最小距离差,公式为:
Δr=c2B\Delta r = \frac{c}{2B}Δr=2Bc
其中 BBB 为发射信号带宽,带宽越宽,距离分辨力越高。对于常规脉冲雷达,脉冲宽度 τ\tauτ 与带宽 BBB 近似满足 B≈1/τB \approx 1/\tauB≈1/τ,因此也可表示为:
Δr=cτ2\Delta r = \frac{c\tau}{2}Δr=2cτ
2. 最大单值测距范围
由脉冲重复周期 TrT_rTr 决定,目标回波必须在下一个脉冲发射前到达接收机,否则会产生距离模糊:
Rmax=cTr2R_{\max} = \frac{cT_r}{2}Rmax=2cTr
3. 距离模糊与解模糊方法
当目标距离超过最大单值测距范围时,回波会与后续发射脉冲混淆,导致误判为近目标,公式为:
R=12c(mTr+tR)R = \frac{1}{2}c(mT_r + t_R)R=21c(mTr+tR)
其中 mmm 为模糊次数,tRt_RtR 为回波与最近发射脉冲的延迟时间。
常用解模糊方法:
- 多种脉冲重复频率法 :采用不同 TrT_rTr 发射脉冲,通过多组测量结果计算真实距离;
- 舍脉冲法:周期性发射"空脉冲",通过回波丢失情况判断模糊次数。
雷达距离跟踪原理
距离跟踪是雷达对目标实施连续定位的核心技术,通过持续估计目标回波的延迟时间,实时输出目标的距离参数。
一、距离跟踪的本质
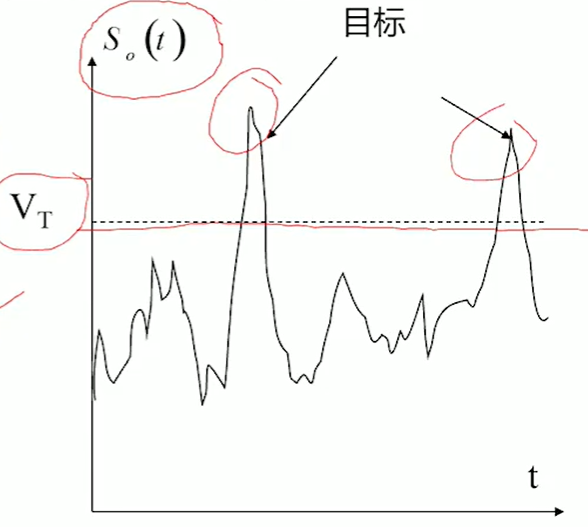
雷达距离跟踪的核心定义是:连续估计和输出特定目标的空间参数。
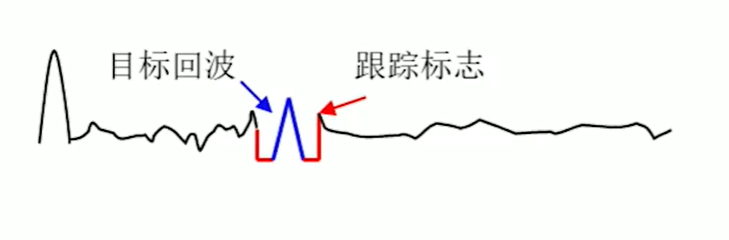
- 其本质是在每次发射脉冲后,通过一个"跟踪标志"(如距离波门)锁定目标回波,并根据回波位置的变化,不断调整跟踪标志的位置,实现对运动目标的持续测距。
- 图中展示了典型的跟踪标志与目标回波的关系:跟踪标志(红色框选的波形)始终对准目标回波(蓝色箭头),两者的位置差会被用来驱动距离跟踪系统调整波门位置。
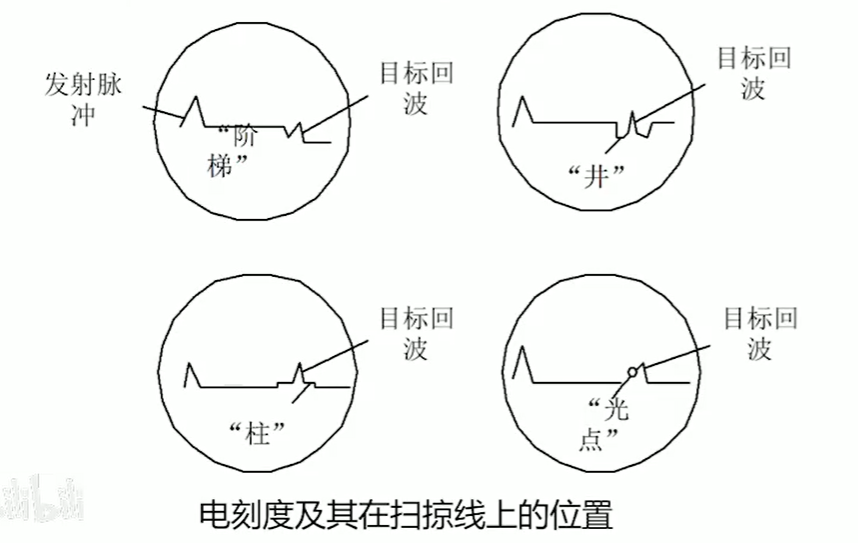
二、人工距离跟踪(早期雷达实现方式)
人工距离跟踪是早期雷达采用的方式,由操作员通过显示器手动对准目标回波,典型的电刻度形式有以下几种:
| 电刻度类型 | 显示方式 | 操作方式 |
|---|---|---|
| "阶梯"刻度 | 扫描线上的阶梯状标记 | 操作员转动旋钮,调整阶梯的位置,使其对准目标回波 |
| "井"刻度 | 扫描线上的矩形缺口标记 | 操作员将缺口对准目标回波中心,读取对应距离 |
| "柱"刻度 | 扫描线上的凸起柱状标记 | 操作员移动柱状标记,使其压在目标回波上 |
| "光点"刻度 | 扫描线上的亮点标记 | 操作员将光点移动到目标回波的中心位置 |
工作流程
- 雷达发射脉冲,在显示器上形成扫描线;
- 目标回波出现在扫描线上,位置对应目标距离;
- 操作员通过旋钮调整电刻度位置,使其与目标回波对齐;
- 电刻度的位置直接转换为目标距离,输出给雷达系统。
三、自动距离跟踪(现代雷达主流方式)
现代雷达已普遍采用自动距离跟踪,核心是利用距离波门实现闭环跟踪,原理如下:
- 距离波门设置:在目标回波的预期位置,设置一对前后波门,分别覆盖回波的前沿和后沿。
- 误差信号生成:比较前后波门内的回波能量,若回波中心偏移,前后波门的能量差会产生误差信号。
- 闭环调整:误差信号驱动波门发生器调整波门位置,使波门始终对准回波中心,实现自动跟踪。
自动距离跟踪的优势:
- 响应速度快,可跟踪高速运动目标;
- 不受操作员疲劳影响,精度和稳定性更高;
- 可同时跟踪多个目标,是现代多目标雷达的必备功能。
核心考点总结
- 跟踪本质:通过持续对准目标回波,实现目标距离的连续估计;
- 人工跟踪:依赖操作员手动调整电刻度,实现简单但精度和效率较低;
- 自动跟踪:利用距离波门和闭环控制,实现高精度、高稳定性的连续测距。