打破感知壁垒:ZED双目视觉方案为人形机器人注入"空间智能"
人形机器人的进化,正从"能动"向"会动"跨越。然而,要实现真正的具身智能(Embodied AI),机器必须先学会"看见"和"理解"物理世界。面对复杂的非结构化环境,传统的视觉方案往往难以兼顾高精度感知与海量数据吞吐。如何解决这一落地痛点?Stereolabs 带来了专为人形机器人量身定制的 ZED 双目3D视觉解决方案,一套致力于打造高保真空间视觉数据底座的核心方案。
【ZED核心方案:紧扣人形机器人的特殊需求】
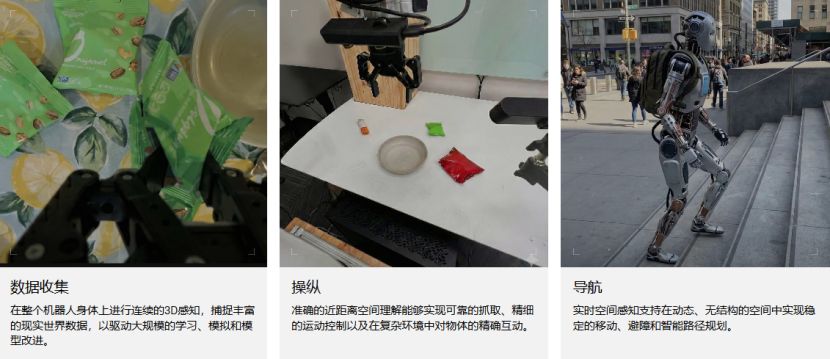
在人形机器人走向真实场景的过程中,高保真的环境理解与双向数据流转至关重要。ZED相机 不仅能持续输出高保真的彩色、深度及位姿数据,支撑机器人进行实时的SLAM、动态避障与智能路径规划,更无缝兼容 NVIDIA Isaac Sim / Omniverse 以及 ROS2 生态系统。
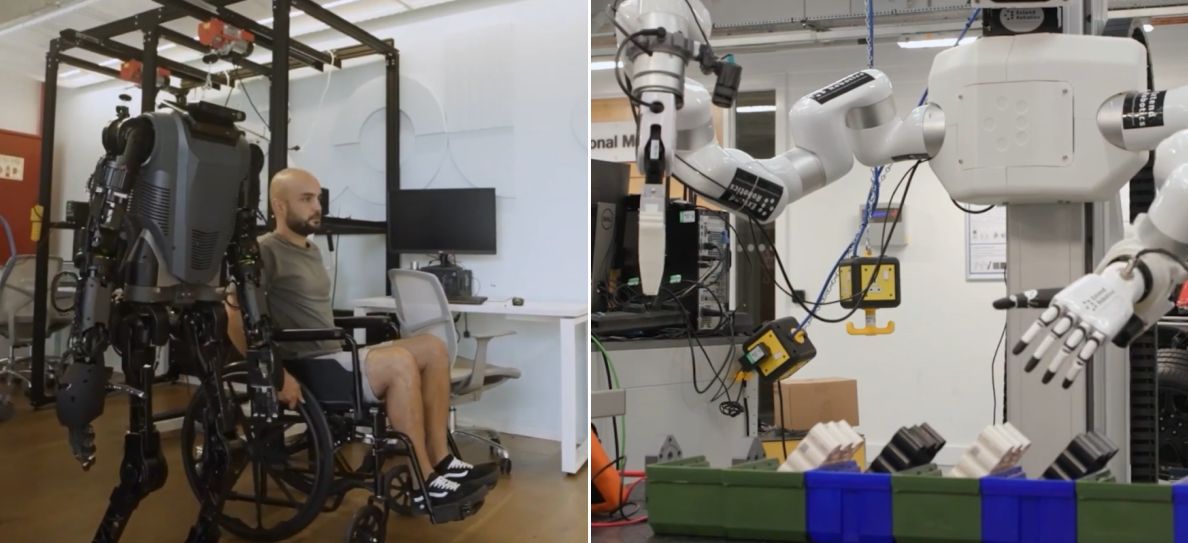
这一特性极大地打通了"仿真训练"到"真实部署(Sim-to-Real)"的数据闭环。通过低延迟的原始数据流,开发者可以轻松获取高质量的空间视觉数据集 ,无论是用于遥操作(Teleoperation) 的沉浸式视觉反馈,还是为端到端大模型提供强化学习的养料,ZED 都在背后扮演着关键的基础设施角色。
【ZED硬件矩阵:覆盖全身的多点位感知部署】
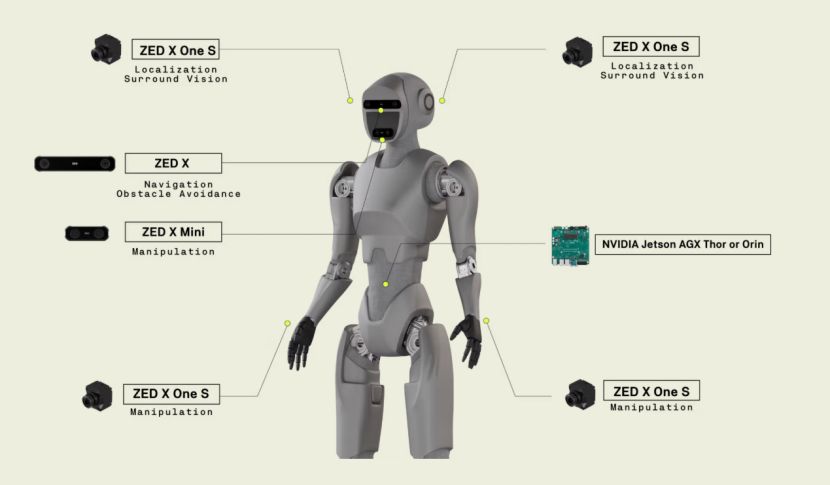
人形机器人的作业高度仿生,需要在极受限的空间内实现多点位感知。Stereolabs 提供的 ZED双目相机 产品线,以其超紧凑的设计和差异化性能,完美契合了头部、躯干到肢体的部署需求:

【结语】
通过将 ZED X One S 、ZED X 或 ZED X Mini 灵活集成于机器人的头部、胸腔或手腕,人形机器人终于能够获得连贯、动态且类人的空间感知能力。
结合内置目标跟踪、点云生成及传感器融合算法的 ZED SDK,Stereolabs成功将复杂的视觉堆叠转化为开发者手中开箱即用的工具,显著缩短了从原型设计到规模化部署的周期,推动人形机器人在动态、非结构化环境中实现更智能的感知与交互,为具身智能时代的到来奠定坚实基础。
欢迎关注 "欣佰特科技 " ,持续为大家带来 "具身智能领域 "前沿技术及应用!详情可邮件咨询sales@cnbestec.com