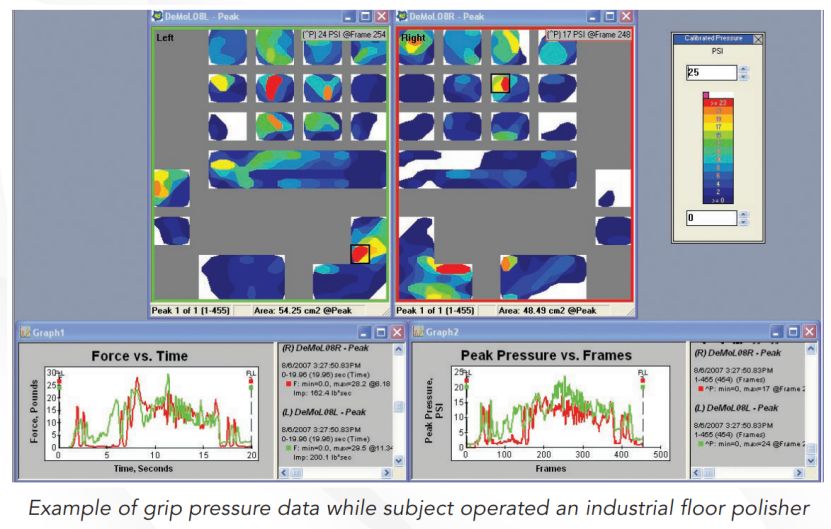
当下具身智能已从视觉单模态驱动,迈向视 - 触 - 动多模态融合 新阶段,高质量人手触觉数据 成为模型训练与灵巧操作研发的核心刚需。Tekscan 凭借深耕触觉传感的技术积累,以Tekscan压力分布 核心技术,打造Tekscan人手压力分布数据手套 (Grip System),作为Tekscan压力分布测量系统 明星单品,为具身智能数据采集提供高精度、高稳定的落地方案。

Grip System核心硬件参数
**· 超薄传感:**0.15mm 柔性传感器,不干扰手部自然动作、保障完整手部活动范围
**· 高密度感知:**349 个传感单元 + 18 个独立分区,精准覆盖五指与手掌关键解剖区域
**· 高采样率:**有线版最高 750Hz、无线版 200Hz,捕捉动态滑移、瞬态发力等精细动作
**· 高效数采:**支持左右手同步测量,2D/3D 数据实时呈现,可输出总力、峰值压力、力中心核心指标,兼容 ASCII/AVI 导出,导出数据可用于深度学习模型的数据预处理
具身智能数据采集核心优势
-
**高保真还原:**高时空分辨率捕捉人类抓握原生触觉特征,为模仿学习、强化学习提供真实数据,为机器人抓取力控优化提供数据参考
-
**无干扰采集:**穿戴式设计还原真实场景交互,可采集贴近真实握持状态的压力数据
-
**多模态融合:**可联动视觉、惯性、肌电设备,可辅助构建多模态触觉数据样本
-
**稳定易用:**商用成熟系统一致性强,可满足实验室常态化触觉数据采集需求

具身智能核心应用场景
-
人类示范数据采集:采集抓取、装配、工具操作等真实触觉数据,为机器人模仿学习提供原生参考
-
灵巧手力控标定:为仿人机器人灵巧手提供全手压力分布反馈,支撑易碎品、软质物体自适应夹持
-
触觉数据样本构建:采集标准化触觉数据,降低具身智能模型训练与真机试错成本
-
人机交互监测:实时监测接触力,可为协作机器人、外骨骼交互提供接触力数据参考
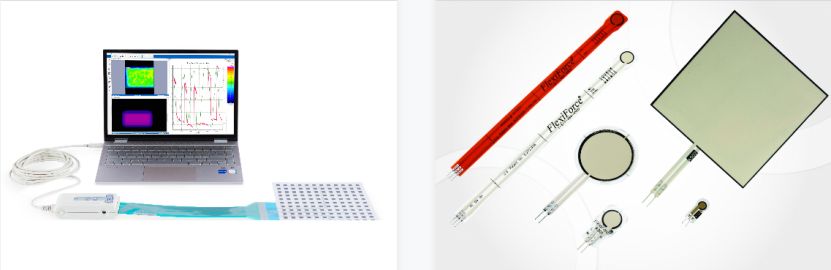
Tekscan压力分布测量系统全系列
同步提供 I-Scan界面压力测量、SeatScan座椅压力分析、GaitScan足底步态测试、FlexiForce单点柔性传感器等方案,覆盖工业、医疗、汽车、体育等多领域科研场景。
多元落地应用
除具身智能领域外,Tekscan 人手压力分布数据手套已应用于汽车方向盘人机工程、工业工具手柄优化、医疗手功能康复、运动器材握力分析等场景,为科研与产品研发提供稳定数据支撑。
具身智能的研究推进,离不开高精度感知与真实数据。Tekscan 人手压力分布数据手套 依托成熟的Tekscan 压力分布技术,打通 "人手真实交互→机器人精准复现" 数采链路,为具身智能科研提供实用硬件方案。
欢迎关注 "欣佰特科技 " ,持续为大家带来 "具身智能领域 "前沿技术及应用!详情可邮件咨询sales@cnbestec.com