分布式具身智能平台(Distributed Embodied Intelligence Platform):UAV&UGV空地协同自治系统架构(GNSS拒止)
视频、雷达SLAM 巨视安防 2026年5月20日 07:00 上海
中文
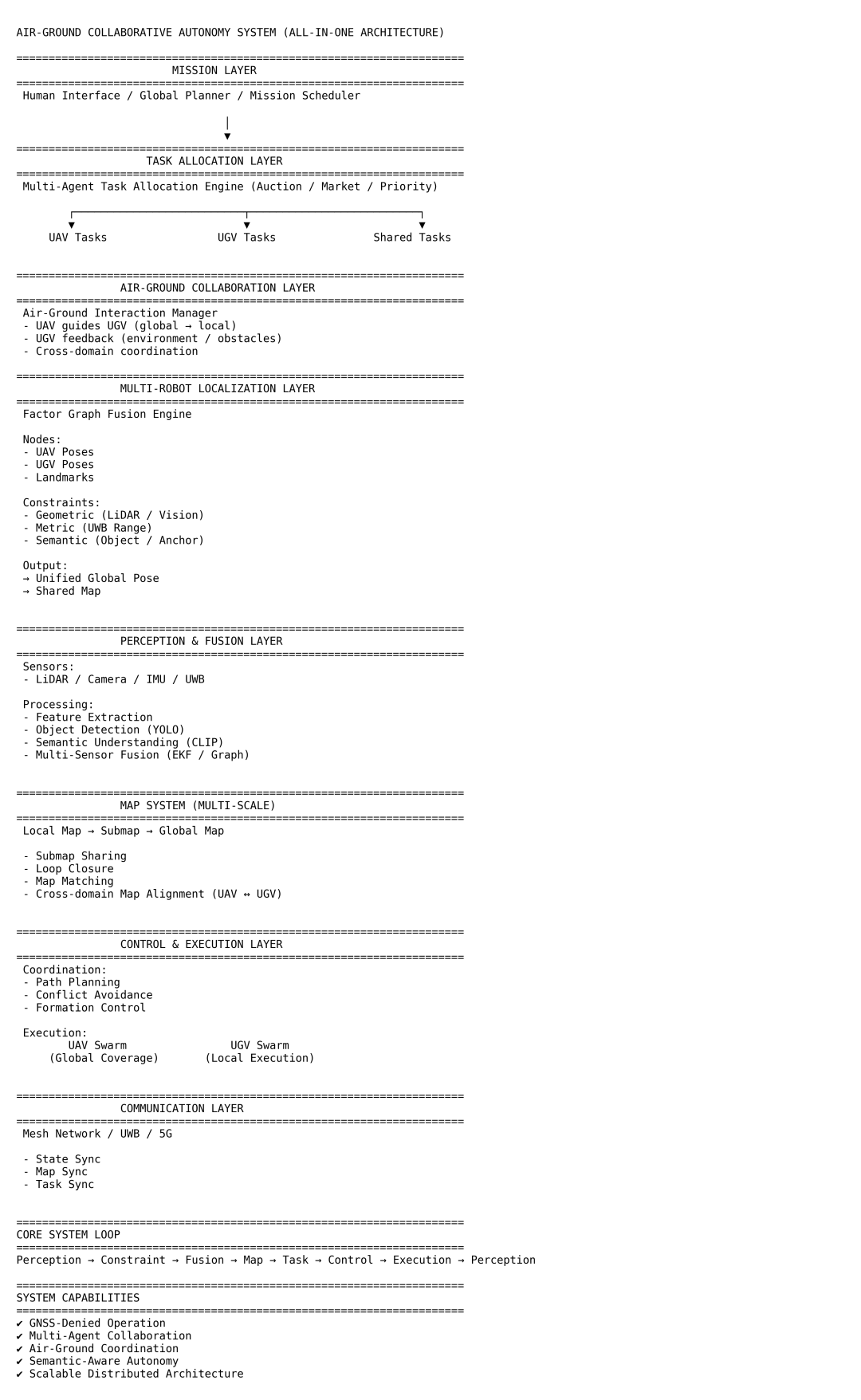
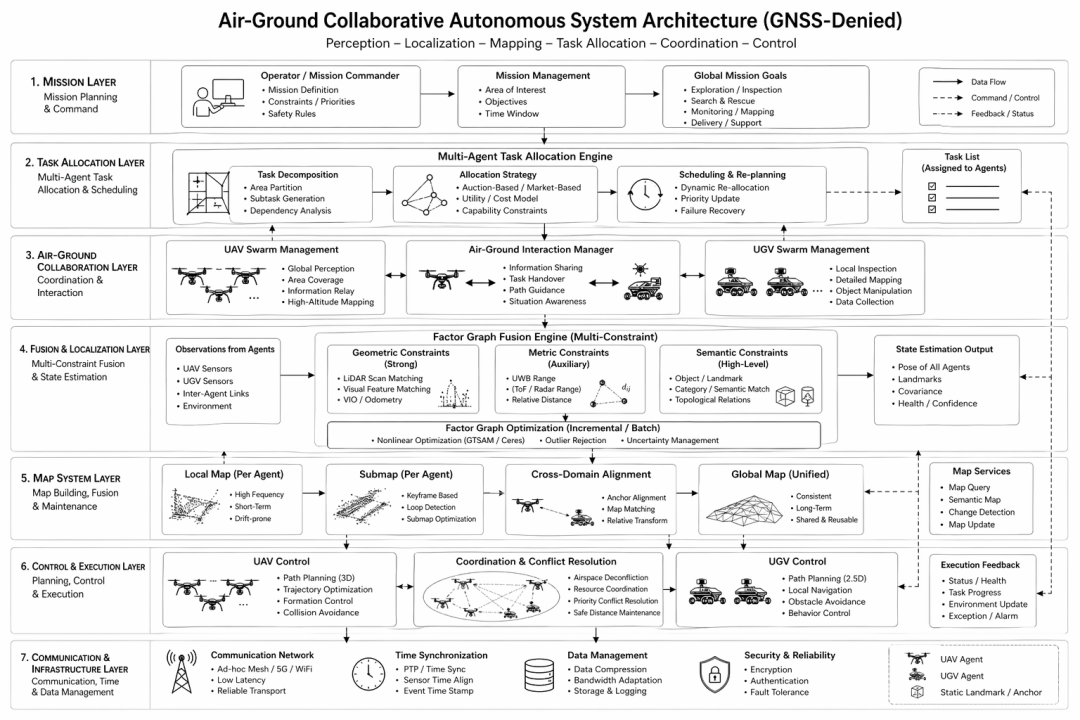
构建了一套面向GNSS拒止环境的空地协同自主系统,实现从多模态感知、多机器人融合定位,到任务分配与协同控制的全栈闭环能力。
英文
Provide a full-stack air-ground collaborative autonomy system, integrating perception, multi-robot localization, task allocation, and coordinated control under GNSS-denied environments.
分布式具身智能平台(Distributed Embodied Intelligence Platform)
包含四个核心壁垒:
🔥 1. 多约束融合
-
LiDAR / Vision / UWB / Semantic
-
Factor Graph统一建模
🔥 2. 空地协同
-
UAV(全局) + UGV(局部)
-
跨域协同
🔥 3. 多机任务系统
-
Task Allocation
-
动态重规划
🔥 4. 地图系统
-
Submap → Global Map
-
可复用 / 可扩展
1️⃣ 数据流
-
↓ 主流程(感知 → 决策 → 控制)
-
↔ 横向(UAV ↔ UGV)
-
↑ 反馈(执行 → 感知)
👉 形成闭环:
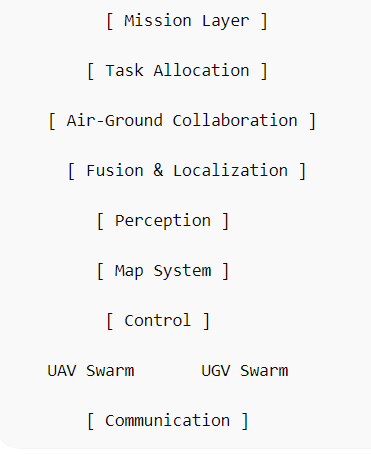
Perception → Fusion → Map → Task → Control → Execution → Perception
2️⃣ 空地协同被"视觉强化"
┌────────────────────┐
│ Air-Ground Manager │
└────────────────────┘
↙ ↘
UAV UGV
👉 明确表达:
-
UAV主导(全局)
-
UGV执行(局部)
3️⃣ 融合引擎
┌──────────────────────────────┐
│ Factor Graph Fusion Engine │
│------------------------------│
│ Geometric | Metric | Semantic │
└──────────────────────────────┘
4️⃣ Map System
Local Map → Submap → Global Map
-
Loop Closure
-
Map Matching
-
Cross-domain Alignment
5️⃣ UAV vs UGV差异
| UAV | UGV |
|---|---|
| Global View | Local Precision |
| Sparse | Dense |
| Fast | Stable |