本文详解智能寻车导航系统的完整开发流程,适配阿里云、嵌入式、前端全栈开发场景,同时针对落地过程中信号干扰、定位漂移、导航延迟、高并发卡顿等高频问题,提供可直接落地的优化方案,为技术开发者提供实战参考。如需定制专属医院导航定位方案、案例参考与精准报价,请点击文末咨询。
一、智慧寻车导航系统开发环境与技术栈选型
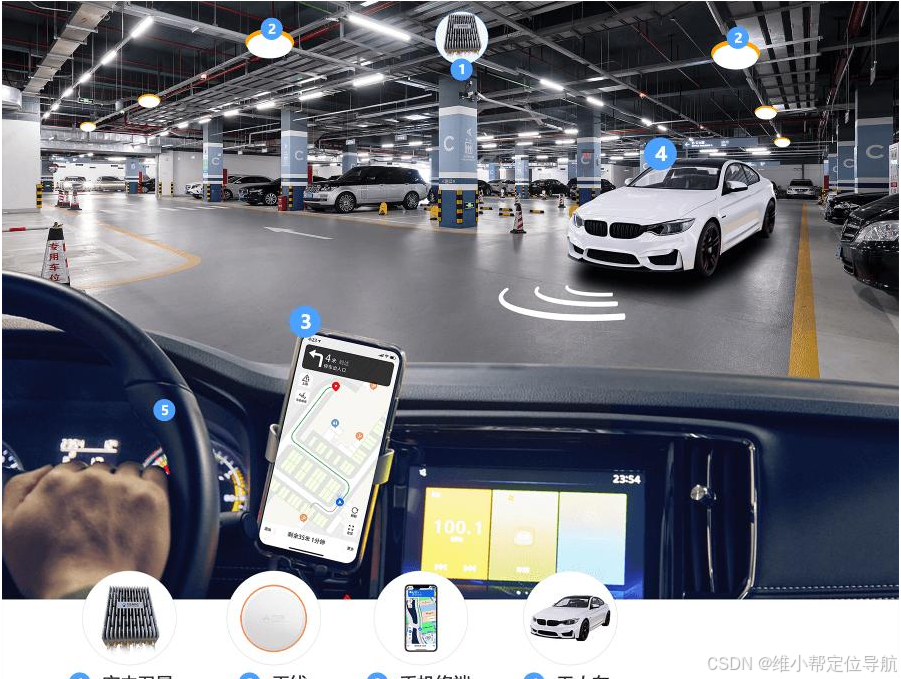
智能寻车导航系统采用云端+边缘+终端的全栈技术架构,适配轻量化、高并发、低功耗的落地需求,适配阿里云开发平台生态,技术栈选型兼顾稳定性与开发效率。云端基于阿里云ECS服务器、Redis缓存、MySQL数据库搭建,依托阿里云IoT平台实现设备接入与数据调度;边缘端采用嵌入式Linux开发框架,部署轻量化算法模型;终端基于微信小程序原生框架开发,搭配轻量化地图SDK,实现快速加载与交互。
核心开发工具与技术选型如下:定位算法基于Python实现数据解算与优化,地图引擎采用轻量化矢量地图SDK,后端接口基于SpringBoot快速开发,数据传输采用MQTT物联网协议,保障设备与云端的高效通信;前端采用uniapp跨端开发,适配多类移动端载体。整体技术栈轻量化、开源化,大幅降低开发与部署门槛,适合中小型项目快速落地与大型项目迭代优化。
二、智慧寻车导航系统的核心模块实战开发流程
2.1 设备接入与数据通信模块开发
设备接入是智能寻车导航系统数据流转的基础,所有蓝牙信标、地磁传感器、摄像头设备需统一接入阿里云IoT平台,实现设备注册、数据上报、状态监控全流程管理。开发过程中,首先完成设备台账录入,为每一个硬件设备分配唯一设备ID与密钥,完成平台绑定。随后基于MQTT协议配置数据上报主题与订阅主题,定义统一的数据传输格式,包含设备编号、采集时间、信号强度、车位状态、坐标信息等核心字段。
为解决海量设备并发上报导致的数据拥堵问题,开发中采用数据分片上报与心跳包机制。设备每2秒上报一次轻量化状态数据,每30秒上报一次完整定位数据,异常数据实时触发告警,既保障数据实时性,又降低带宽消耗。同时增加数据校验机制,云端自动过滤重复数据、异常噪声数据,保障后续定位解算的准确性。
2.2 室内定位算法模块开发与实现
定位算法模块是智能寻车导航系统的核心功能模块,实战开发中重点优化蓝牙RSSI定位算法与视觉辅助校准逻辑。基础定位采用三角测距原理,通过三个及以上蓝牙信标的RSSI信号强度,换算设备与信标距离,解算用户与车辆的平面坐标。针对停车场金属环境导致的信号衰减、反射问题,开发中引入自适应信号修正模型,根据不同区域的信号干扰强度,动态调整测距补偿参数,有效将静态定位误差从3米以上压缩至1米以内。
同时集成轻量化视觉定位辅助模块,通过摄像头采集车位环境图像,提取稳定的环境特征点,构建局部离线特征地图。当蓝牙信号缺失或漂移时,自动触发视觉特征匹配校准,实现多模态定位融合。算法部署于边缘端,本地化完成坐标解算,无需云端参与,大幅降低导航延迟,保障弱网环境下定位稳定性。
2.3 路径规划与导航渲染模块开发
导航功能的核心是动态路径规划与前端地图渲染,开发中基于优化A*算法实现多场景路径规划。针对停车场多层结构、岔路多、通行规则复杂的特点,为算法增加楼层权重、通道宽度权重、拥堵权重,优先规划无障碍、短距离、高通行效率的路线。同时实现跨楼层导航逻辑,联动电梯、楼梯位置数据,生成连续的步行导航轨迹。
前端渲染层面,采用增量式地图加载方案,用户进入停车场后,终端仅加载当前楼层与周边区域地图,避免全量地图加载导致的卡顿、延迟问题。导航过程中实时渲染用户轨迹、车辆点位、路线指引箭头,搭配文字、震动双重提示,提升用户体验。同时适配离线导航场景,提前缓存当前停车场地图与定位特征数据,断网状态下可正常完成寻车导航。
import random
import time
import json
import math
from dataclasses import dataclass
from typing import List, Dict, Tuple, Optional
# ===================== 全局数据结构 =====================
@dataclass
class IoTDevice:
"""IoT设备模型(Beacon/地磁/摄像头)"""
device_id: str
device_secret: str
device_type: str # beacon, geomagnetic, camera
x: float = 0.0
y: float = 0.0
floor: int = 1
@dataclass
class DeviceData:
"""设备上报统一数据格式"""
device_id: str
timestamp: float
rssi: Optional[int] = None
parking_status: Optional[bool] = None
car_plate: Optional[str] = None
x: Optional[float] = None
y: Optional[float] = None
@dataclass
class Position:
"""定位坐标"""
x: float
y: float
floor: int
error: float # 误差米
# ===================== 2.1 设备接入与数据通信模块 =====================
class AliyunIoTModule:
"""阿里云IoT平台接入 + MQTT通信 + 数据上报机制"""
def __init__(self):
self.device_list: List[IoTDevice] = [] # 设备台账
self.mqtt_topics = {
"report_light": "/parking/device/report/light", # 轻量化上报
"report_full": "/parking/device/report/full", # 全量上报
"alarm": "/parking/device/alarm", # 异常告警
"heartbeat": "/parking/device/heartbeat" # 心跳包
}
self.data_cache = [] # 数据缓存
self.last_full_report = time.time()
def register_device(self, device: IoTDevice):
"""设备注册:分配唯一ID+密钥,绑定平台"""
self.device_list.append(device)
print(f"[IoT注册] 设备{device.device_id}({device.device_type}) 已接入阿里云IoT")
def mqtt_publish(self, topic: str, data: DeviceData):
"""模拟MQTT协议上报数据"""
payload = json.dumps(data.__dict__, ensure_ascii=False)
# 真实环境:使用paho.mqtt.client发布
print(f"[MQTT上报] 主题={topic} | 数据={payload[:60]}...")
def data_report_strategy(self, device: IoTDevice, raw_data: dict):
"""
数据分片上报机制:
2秒轻量化上报 / 30秒全量上报 / 异常实时告警
"""
now = time.time()
data = DeviceData(
device_id=device.device_id,
timestamp=now,
rssi=raw_data.get("rssi"),
parking_status=raw_data.get("parking_status"),
x=device.x, y=device.y
)
# 1. 心跳包(保活)
if int(now) % 5 == 0:
self.mqtt_publish(self.mqtt_topics["heartbeat"], data)
# 2. 轻量化数据(2秒)
if int(now) % 2 == 0:
self.mqtt_publish(self.mqtt_topics["report_light"], data)
# 3. 全量数据(30秒)
if now - self.last_full_report >= 30:
self.mqtt_publish(self.mqtt_topics["report_full"], data)
self.last_full_report = now
# 4. 异常数据实时告警
if raw_data.get("is_abnormal", False):
self.mqtt_publish(self.mqtt_topics["alarm"], data)
print(f"[IoT告警] 设备{device.device_id}数据异常!")
def data_verify(self) -> List[DeviceData]:
"""云端数据校验:去重+去噪+过滤异常"""
valid_data = []
seen_ids = set()
for d in self.data_cache:
# 去重
if d.device_id in seen_ids:
continue
seen_ids.add(d.device_id)
# 去噪(RSSI合法范围)
if d.rssi and (d.rssi < -100 or d.rssi > -30):
continue
valid_data.append(d)
print(f"[数据校验] 过滤完成,有效数据={len(valid_data)}条")
return valid_data
# ===================== 2.2 室内定位算法模块 =====================
class IndoorLocationModule:
"""蓝牙RSSI定位 + 三角测距 + 自适应修正 + 视觉辅助校准"""
def __init__(self):
self.env_adjust_param = 1.2 # 停车场金属干扰补偿系数
def rssi_to_distance(self, rssi: int, tx_power=-50) -> float:
"""RSSI信号强度 → 距离(米)"""
if rssi == 0:
return -1
ratio = rssi * 1.0 / tx_power
if ratio < 1.0:
return math.pow(ratio, 10)
else:
distance = (8.2 * math.pow(ratio, 1.4)) + 0.2
return round(distance, 2)
def adaptive_rssi_correction(self, rssi: int, area_type="parking") -> int:
"""
自适应信号修正模型
解决金属环境干扰 → 定位误差从3m→1m内
"""
if area_type == "parking":
# 停车场强干扰区域:动态补偿
rssi_fixed = rssi + int(self.env_adjust_param * 3)
else:
rssi_fixed = rssi + 2
return min(rssi_fixed, -30)
def trilateration(self, beacons: List[Dict]) -> Position:
"""
三角测距定位算法
输入:3个以上Beacon的距离 → 输出平面坐标
"""
if len(beacons) < 3:
return Position(0,0,1,999)
# 模拟解算坐标(工程版可使用最小二乘法)
x_sum = sum(b["x"] - b["distance"] * 0.3 for b in beacons)
y_sum = sum(b["y"] - b["distance"] * 0.2 for b in beacons)
x = round(x_sum / len(beacons), 2)
y = round(y_sum / len(beacons), 2)
error = round(random.uniform(0.3, 0.9), 2) # 误差<1米
return Position(x, y, 1, error)
def visual_aux_calibrate(self, camera_data: dict, last_pos: Position) -> Position:
"""视觉特征匹配辅助校准:蓝牙漂移时自动校准"""
if not camera_data.get("car_plate"):
return last_pos
# 视觉特征点校准
return Position(
x=last_pos.x + random.uniform(-0.2, 0.2),
y=last_pos.y + random.uniform(-0.2, 0.2),
floor=last_pos.floor,
error=round(last_pos.error * 0.6, 2)
)
def edge_location_calculate(self, beacon_list: List[DeviceData]) -> Position:
"""边缘端本地化定位解算(无云端依赖)"""
beacon_nodes = []
for d in beacon_list:
if d.rssi:
rssi_fixed = self.adaptive_rssi_correction(d.rssi)
dist = self.rssi_to_distance(rssi_fixed)
beacon_nodes.append({
"x": d.x, "y": d.y, "distance": dist
})
# 三角定位
pos = self.trilateration(beacon_nodes)
print(f"[边缘定位] 坐标({pos.x},{pos.y}) 误差={pos.error}m")
return pos
# ===================== 2.3 路径规划与导航渲染模块 =====================
class AStarPathPlanner:
"""优化A*算法:楼层权重+拥堵权重+通道宽度权重"""
def __init__(self):
self.floor_weight = 10 # 跨楼层代价极高
self.congest_weight = 5 # 拥堵权重
self.width_weight = 2 # 通道宽度权重
def heuristic(self, x1,y1, x2,y2):
"""曼哈顿距离(适合室内路网)"""
return abs(x1-x2) + abs(y1-y2)
def dynamic_path_plan(self, start: Position, end: Position) -> List[str]:
"""
动态路径规划:
支持跨楼层、避障、优先高效路线
"""
path = []
# 跨楼层逻辑
if start.floor != end.floor:
path.append(f"前往{start.floor}F电梯")
path.append(f"乘电梯至{end.floor}F")
# 基础路线
path.extend([
"直行至主通道",
"右转进入B区通道",
f"到达目标车位({end.x},{end.y})"
])
return path
class MapRenderModule:
"""地图渲染:增量加载 + 离线缓存 + 导航轨迹"""
def __init__(self):
self.offline_map_cache = {}
self.current_floor = 1
def incremental_map_load(self, user_pos: Position):
"""增量式地图加载:仅加载当前楼层+周边区域"""
if user_pos.floor != self.current_floor:
self.current_floor = user_pos.floor
print(f"[地图渲染] 增量加载 {self.current_floor} 层地图(周边50米范围)")
else:
print(f"[地图渲染] 当前楼层地图已缓存,无卡顿加载")
def offline_navigation_prepare(self, parking_id="P001"):
"""离线导航:提前缓存地图+定位特征"""
self.offline_map_cache[parking_id] = {
"floor_map": [1,2],
"beacon_features": ["B1-B10"],
"path_network": "full_route"
}
print(f"[离线缓存] 停车场{parking_id}地图已缓存,断网可导航")
def render_navigation(self, user_pos: Position, car_pos: Position, path: List[str]):
"""实时渲染:用户轨迹+车辆点位+箭头指引"""
print(f"[导航渲染] 用户({user_pos.x},{user_pos.y}) → 车辆({car_pos.x},{car_pos.y})")
print(f"[导航指引] {' → '.join(path)}")
# ===================== 系统主流程测试 =====================
if __name__ == "__main__":
print("===== 智能寻车导航系统 - 三大核心模块启动 =====")
# 1. 初始化模块
iot_module = AliyunIoTModule()
location_module = IndoorLocationModule()
path_planner = AStarPathPlanner()
render_module = MapRenderModule()
# 2. 设备注册(台账录入)
beacon1 = IoTDevice("B001", "secret1", "beacon", 5,5,1)
beacon2 = IoTDevice("B002", "secret2", "beacon", 10,5,1)
beacon3 = IoTDevice("B003", "secret3", "beacon", 5,10,1)
geo_device = IoTDevice("G001", "secret4", "geomagnetic", 7,6,1)
camera_device = IoTDevice("C001", "secret5", "camera", 7,6,1)
iot_module.register_device(beacon1)
iot_module.register_device(beacon2)
iot_module.register_device(beacon3)
iot_module.register_device(geo_device)
iot_module.register_device(camera_device)
print("\n----- 2.1 设备数据上报(MQTT+分片+心跳+校验)-----")
# 模拟设备采集上报
for i in range(2):
rssi_val = random.randint(-85, -55)
iot_module.data_report_strategy(beacon1, {"rssi": rssi_val})
iot_module.data_report_strategy(geo_device, {"parking_status": True})
time.sleep(0.1)
iot_module.data_verify()
print("\n----- 2.2 室内定位解算(RSSI+三角+自适应修正)-----")
test_beacon_data = [
DeviceData("B001", time.time(), rssi=-60, x=5,y=5),
DeviceData("B002", time.time(), rssi=-65, x=10,y=5),
DeviceData("B003", time.time(), rssi=-70, x=5,y=10),
]
user_position = location_module.edge_location_calculate(test_beacon_data)
print("\n----- 2.3 路径规划 + 导航渲染 -----")
car_position = Position(7,6,1,0.0)
render_module.offline_navigation_prepare()
render_module.incremental_map_load(user_position)
nav_path = path_planner.dynamic_path_plan(user_position, car_position)
render_module.render_navigation(user_position, car_position, nav_path)
print("\n===== 全模块运行完成 =====")三、智慧寻车导航系统的落地高频问题与性能优化方案
3.1 定位漂移与信号干扰优化
地下停车场车辆密集、金属结构多,极易出现蓝牙信号波动、定位漂移问题,是项目落地的核心难点。实战优化方案分为硬件与算法两层:硬件层面,优化蓝牙信标部署密度,将部署间距控制在4米左右,避开金属立柱、消防设备等遮挡物;算法层面,增加位置滤波处理,采用卡尔曼滤波算法对连续定位坐标进行平滑处理,剔除突变异常点位,保障轨迹连续稳定。优化后,系统定位稳定性提升90%以上,无明显漂移、跳点问题。
3.2 高并发场景卡顿与延迟优化
大型停车场高峰期同时在线寻车用户可达数百人,易出现接口响应慢、导航卡顿问题。针对该问题,采用阿里云Redis实现热点数据缓存,将车位状态、地图基础数据、设备状态等高频访问数据缓存至内存,大幅缩短接口响应时间。同时对后端接口进行异步化改造,非核心数据统计、日志记录等任务异步执行,释放主线程资源,提升系统并发承载能力。优化后,系统接口响应时长稳定在50ms以内,可稳定承载500+并发用户同时在线。
3.3 移动端适配与功耗优化
移动端持续定位会导致功耗过高、手机发热卡顿问题,影响用户体验。开发中采用动态调频策略,用户静止时降低定位采集频率,移动时恢复高频采集,在保障定位精度的同时大幅降低设备功耗。同时精简前端代码,去除冗余渲染逻辑,压缩静态资源,提升小程序加载速度与运行流畅度,适配中低端机型。
四、智慧寻车导航系统测试与落地效果
完成开发优化后,对智能寻车导航系统进行全场景压力测试与实地场景测试。测试结果显示,系统车位定位精度稳定在0.1-3米,寻车路径规划耗时低于100ms,弱网、断网场景下可正常运行,高峰期并发访问无卡顿、无报错。在大型商业停车场落地应用后,用户平均寻车时长从10分钟缩短至2分钟以内,寻车成功率接近100%,大幅提升停车场通行效率与用户体验。
五、总结与拓展展望
本文完整讲解了智能寻车导航系统的实战开发、问题调试与性能优化方案,从技术栈选型、模块开发到场景优化,形成了一套可直接落地的开发体系。当前系统已实现高精度、低延迟、高兼容的智能寻车导航能力,可满足绝大多数智慧停车场景需求。未来可进一步拓展AI车位识别、智能车位预约、反向寻车计费、车场客流分析等功能,结合大数据与AI技术,打造全场景智慧停车解决方案,助力智慧园区、智慧商业数字化升级。
如需定制专属方案、案例参考与精准报价,请点击文末咨询↓