哈喽大家好,我是疯狂读论文的戴夫。今天继续啃一篇论文。
多机器人系统听起来很美好。
一群无人机可以一起巡检仓库、协同搬运、搜索救援;地面机器人和飞行机器人也可以混合工作,一个在地面移动,一个从空中穿越障碍。
但只要机器人一多,问题就来了。
它们不能撞到障碍物; 不能撞到彼此; 还要满足自己的动力学限制; 如果是多架无人机靠得很近,还会有气流干扰。
比如两架无人机上下错开飞,下面那架可能被上面旋翼的气流影响;如果规划时完全不管这个气动力交互,轨迹看起来没撞,真实飞起来却可能偏离计划。
所以,多机器人运动规划真正难的地方是:
在多个机器人同时运动时,既要考虑碰撞,又要考虑动力学,还要考虑无人机靠近时的相互气流影响。
这篇 TRO 2026 论文讨论的就是这个问题。
论文题目是:
db-ECBS: Interaction-Aware Multirobot Kinodynamic Motion Planning
DOI:10.1109/TRO.2025.3637148
可以理解为:
一种考虑机器人交互的多机器人动力学运动规划方法。
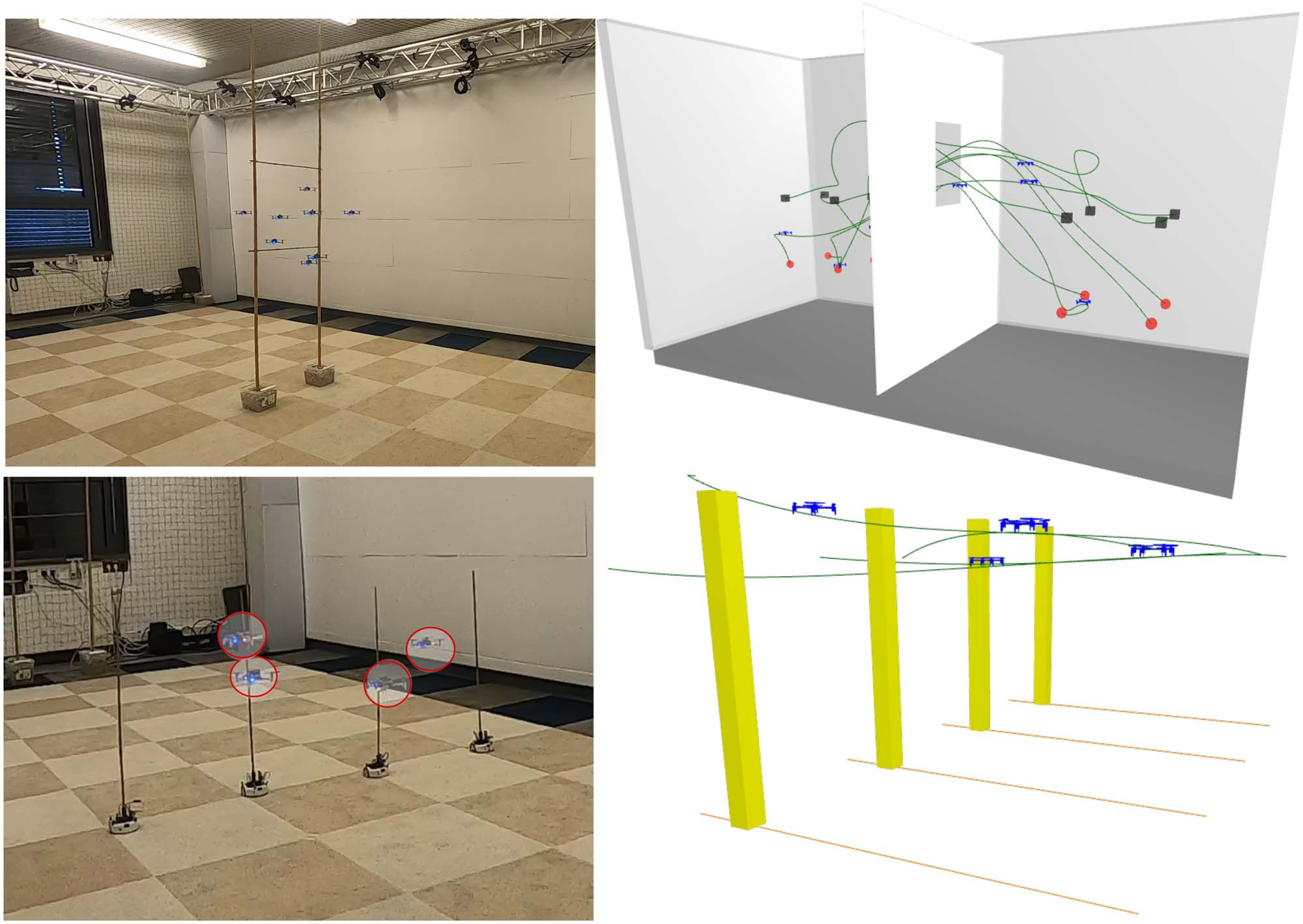
图1 多机器人规划实验场景
一、这篇论文讲什么?
这篇论文研究的是 multirobot kinodynamic motion planning,多机器人动力学运动规划。
普通路径规划关心的是:
机器人从起点到终点怎么走,别撞就行。
但动力学运动规划还要进一步考虑:
速度不能突然变; 加速度不能超过限制; 轨迹必须是机器人真实能执行的; 飞行机器人还要考虑推力、控制输入和气流扰动。
如果只有一个机器人,这已经不简单。
如果有一群机器人,同时还要穿过狭窄空间,难度就会明显上升。
作者提出的方法叫 db-ECBS。
它的目标是为一组机器人规划轨迹,让它们尽快到达目标,同时满足三个要求:
不撞障碍物; 不撞其他机器人; 满足机器人自身动力学和控制限制; 对于飞行机器人,还要避免过大的气动力交互。
这篇论文的核心,是把多机器人路径规划,从"几何避障问题"推进到"动力学可执行 + 交互力安全"的规划问题。
二、现有方法卡在哪里?
现有方法主要卡在三个地方。
第一,只看路径,不看动力学。
很多多机器人路径规划方法会把空间离散成网格,然后让机器人在格子上移动。
这样做很高效,但很容易忽略真实机器人能不能这样动。
路径可能看起来可行,但真实执行时速度、加速度或转向能力跟不上。
第二,联合规划太难扩展。
如果把所有机器人放到一个超大的联合状态空间里一起规划,理论上很完整,但机器人数量一多,计算量就爆炸。
两个机器人还能算,十几个机器人就很难。
第三,飞行机器人之间的气流影响经常被忽略。
多架无人机近距离飞行时,不只是有碰撞风险,还有旋翼气流造成的相互扰动。
如果规划时只要求"几何上不相交",可能仍然不安全。
所以这篇论文的切入点是:
多机器人规划不能只追求"不撞",还要让轨迹真实可飞、可控,并且知道机器人靠太近时会互相影响。
三、作者怎么解决?
作者的解决思路可以概括成三步:
先让每个机器人各自找路,再逐个解决冲突,最后把所有轨迹一起优化成真实可执行的运动。
1. 先各自找一条能动的路
第一步,每个机器人先单独规划。
这里用的是 db-A*,也就是 discontinuity-bounded A*。
它不是在普通网格上走,而是在一组提前生成好的 motion primitives,运动基元 上搜索。
运动基元可以理解成一小段机器人真实能执行的动作。
比如向前飞一段、转弯一段、加速一段。
这样规划出来的路,天然更接近真实机器人能执行的轨迹。
不过,为了让搜索更容易,作者允许这些短轨迹之间存在一点点"不连续"。
这就是 db 里的 discontinuity-bounded,有界不连续。
通俗说:
先允许轨迹有一点小接缝,别一开始就要求完美平滑。
2. 再逐个解决机器人之间的冲突
每个机器人各自找路后,放到一起可能会出问题。
可能两个机器人在同一时刻靠得太近; 也可能两架无人机虽然没有撞,但气动力交互超过安全范围。
这时,db-ECBS 会像 CBS/ECBS 一样,在高层搜索里发现冲突,然后加约束,让相关机器人重新规划。
这里的冲突不只是"碰撞",还包括 interaction force violation,交互力超限。
也就是说:
如果两架无人机靠得太近,导致气流干扰太强,系统也会把它当成一个需要解决的冲突。
3. 最后做联合轨迹优化
前两步得到的是一组"基本不冲突"的轨迹,但里面可能还有小的不连续接缝。
所以作者最后再做一次 joint-space trajectory optimization,联合空间轨迹优化。
这一步会把所有机器人放在一起优化,把前面搜索得到的轨迹作为初始猜测。
它的作用是:
修掉不连续跳变; 让轨迹满足真实动力学; 进一步优化总时间或其他代价。
如果优化失败,或者作者想要更好的解,算法就会继续加入更多运动基元,并减小允许的不连续程度,再来一轮。
所以 db-ECBS 的整体逻辑就是:
先粗略找到能过的路,再解决机器人之间的冲突,最后用优化把轨迹修成真正能执行的版本。

图2 db-ECBS 的规划流程
四、关键设计拆解
这篇论文可以用 4 个关键设计来理解。
1. 不只规划路径,还要满足动力学
很多多机器人规划方法得到的是"路线"。
但机器人真正需要的是"轨迹"。
路线只告诉你从哪里到哪里; 轨迹还要告诉你什么时候到、速度多大、加速度怎么变。
db-ECBS 从一开始就使用运动基元,这些运动基元本身就考虑机器人动力学。
这让规划结果不是一条抽象路径,而是更接近真实机器人能执行的运动。
2. 有界不连续:先粗后精
这篇论文一个很重要的技巧,是允许早期搜索阶段出现小的不连续。
听起来有点反直觉。
轨迹不连续,不是不能执行吗?
确实,最终轨迹必须连续、可执行。
但在搜索阶段,如果强行要求每一小段动作都完美接上,问题会变得很难。
作者的做法是:
先允许小接缝,把大致路线找出来; 再通过联合优化把接缝修平。
通俗说就是:
先拼出大概路线,再打磨成平滑轨迹。
3. 用 ECBS 思路提高扩展性
CBS 是多机器人路径规划里的经典框架。
它的思想很简单:
先让每个机器人各走各的; 发现冲突后,再给其中一个机器人加约束重新规划; 不断重复,直到没有冲突。
ECBS 是 CBS 的一个有界次优版本。
它不一定每一步都追求绝对最优,而是在一定质量保证内,更快找到可用解。
db-ECBS 借用了这个思路。
这让它比 db-CBS 更适合机器人数量较多的场景。
它不是盲目追求最优,而是在可接受的次优范围内,换取更好的规模扩展性。
4. 把气流干扰也当成规划约束
这篇论文最有特色的一点,是 interaction-aware,交互感知。
多架无人机靠近时,旋翼气流会产生额外扰动。
作者没有简单地把每架无人机都套一个很大的安全椭球,强行让它们离得很远。
那样虽然保守,但会让密集场景很难通过。
他们进一步使用残余交互力模型,估计机器人之间靠近时产生的气动力影响。
如果交互力超过安全阈值,就把它当成冲突,在规划中避开。
通俗说:
它不是只问"会不会撞上",还问"靠这么近飞,会不会被彼此的气流影响到不安全"。
五、实验怎么验证?
作者做了三类实验。
第一类是标准 benchmark。
论文一共测试了 65 个问题,覆盖 6 种不同机器人动力学模型。
包括一阶独轮车、二阶独轮车、二维/三维双积分器、带拖车的小车,以及异构机器人团队。
这些实验用来验证 db-ECBS 在不同动力学系统和不同机器人数量下是否能稳定工作。
第二类是交互感知规划实验。
作者专门设计了多架飞行机器人必须近距离通过的场景。
比如:
多架无人机穿过墙上的小窗口; 8 架无人机在狭窄窗口两侧互换位置; 大小不同的飞行机器人在狭窄空间内交换位置。
这些场景重点考察:如果机器人必须靠得很近,交互力建模到底有没有用。
第三类是真实机器人实验。
作者在真实场地里测试了两种场景:
8 架 Crazyflie 飞行机器人穿过狭窄窗口互换位置; 4 个地面机器人和 4 架飞行机器人混合运动,地面机器人还安装了 60 cm 的竹竿,增加避障难度。

图3 真实机器人验证场景
六、实验结果说明什么?
实验结果可以概括成四点。
1. 机器人数量增加时,db-ECBS 更稳定
在没有气流交互力的场景里,db-CBS 有时能得到更快或更低代价的解。
但随着机器人数量增加,db-CBS 的成功率会下降。
db-ECBS 的优势在于更稳定。
简单说,机器人少的时候,精细搜索可以慢慢算;机器人多的时候,更需要一个能稳定给出可行解的方法。
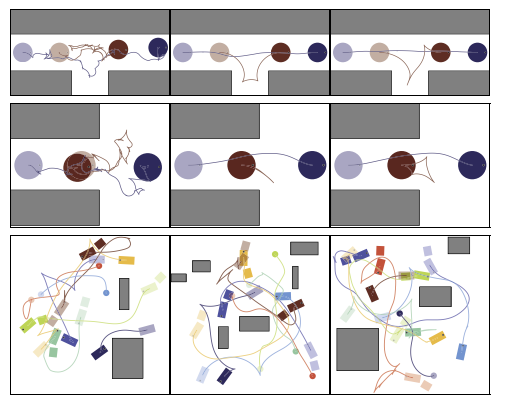
图4 典型 benchmark 对比
2. 它有 anytime 特性,给它更多时间会继续变好
db-ECBS 不是只给一个固定答案。
它可以先快速给出一个可行解,然后继续优化,逐步降低总代价。
论文中的 Kink 例子很直观。
db-ECBS 先找到一条可行轨迹,然后很快把总代价从 60.9 s 降到 45.2 s。
这说明 db-ECBS 更像一个"先给能用方案,再不断改进方案"的规划器。
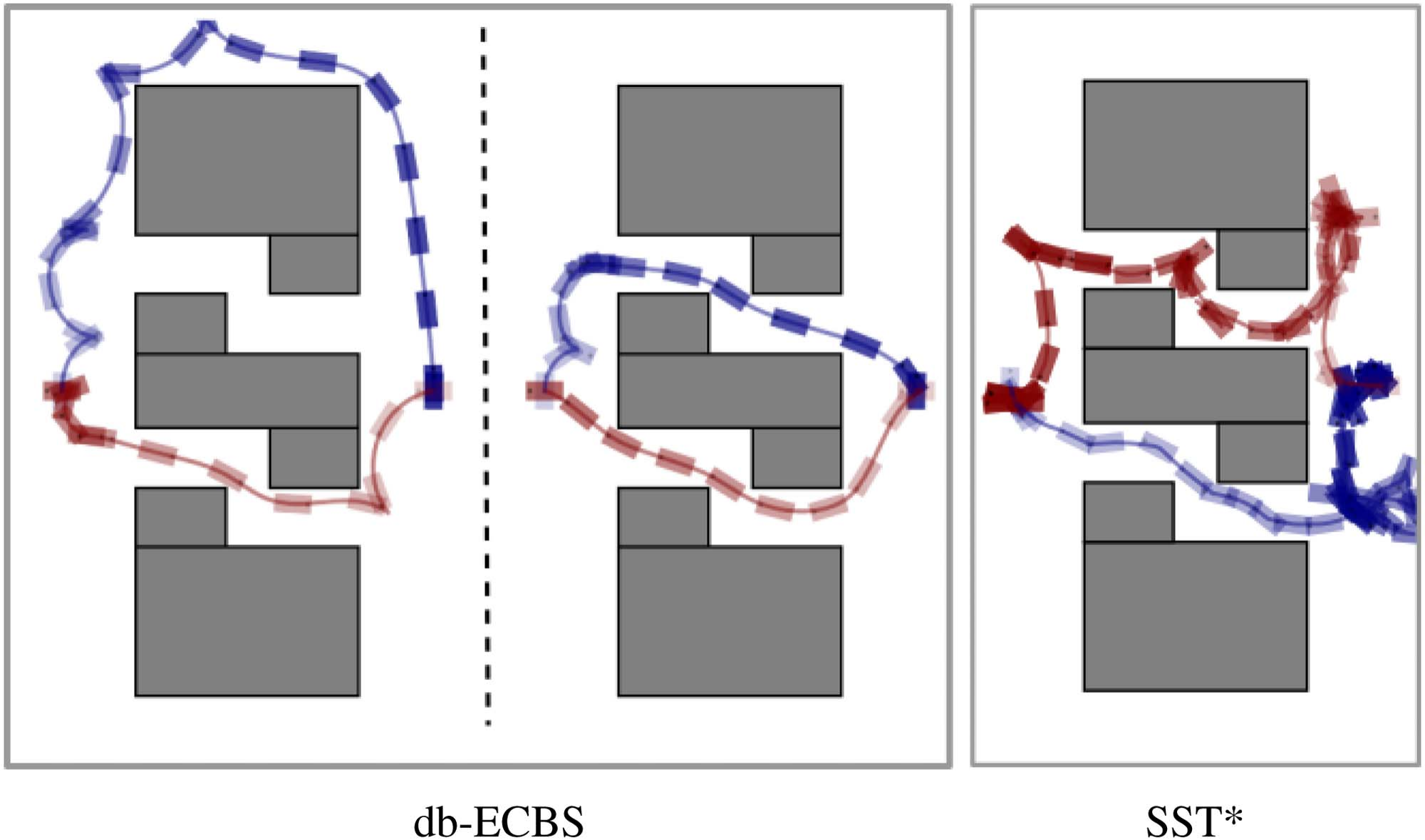
图5 Kink 场景中的 anytime 效果
3. 在密集飞行场景中,交互感知很关键
真正体现 interaction-aware 价值的是密集无人机场景。
保守椭球方法容易因为"安全壳"太大而难以通过,而使用残余交互力模型的 db-ECBS-R 可以保持 100% 成功率,并且得到更好的轨迹代价。
这说明在空间比较宽的时候,保守避让还能凑合;一旦空间变窄,必须准确判断气流交互,而不是简单让无人机离得越远越好。
4. 真实机器人能安全跟踪规划轨迹
最后,作者把规划结果拿到真实机器人上验证。
8 架飞行机器人能够穿过窗口互换位置。
在另一个场景中,4 个地面机器人携带竹竿移动,4 架飞行机器人需要穿过这些移动障碍到达目标。
这说明 db-ECBS 得到的轨迹不是只在仿真里好看,而是可以被真实飞行机器人和地面机器人跟踪执行。
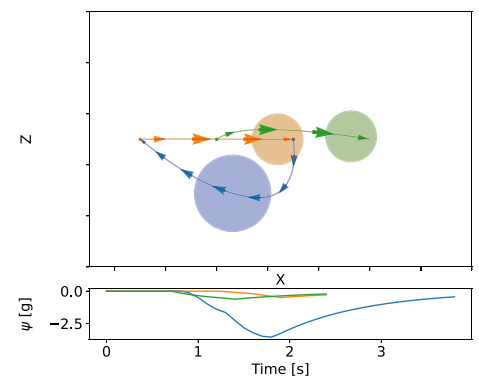
图6 异构飞行机器人交互感知规划结果
七、论文画像
应用范围: 应用范围较广,主要面向多机器人运动规划、无人机集群、仓储机器人、异构机器人协同、空地协同系统,以及需要近距离协作的机器人团队。
复现友好度: 中等偏高。论文代码和 benchmark 可用,但完整复现实验需要运动基元生成、ECBS/db-A* 实现、非线性轨迹优化、碰撞检测库,以及真实机器人平台。
方法新颖度: 较高。亮点在于把 ECBS 的多机器人冲突解决框架,推广到连续空间和动力学约束下,并进一步纳入飞行机器人之间的交互力限制。
思维借鉴度: 很高。尤其值得借鉴的是"先搜索、后优化"的分层思路:搜索负责找拓扑和避障关系,优化负责修复动力学细节。
技术完整度: 较高。论文从问题定义、单机器人 db-A*、多机器人 db-ECBS、交互力建模、理论性质,到仿真 benchmark 和真实机器人验证,形成了完整闭环。
实验充分性: 较充分。实验覆盖 65 个问题、6 种动力学模型、最多 16 个机器人、交互感知密集场景和真实机器人验证,能够支撑主要结论。
最后总结
这篇 TRO 论文的核心价值在于:
它把多机器人运动规划从"几何避碰"推进到了"动力学可执行、可扩展、并考虑飞行器气流交互"的层面。
这篇文章最值得学的地方有三个。
第一,复杂问题可以分层解决。
db-ECBS 没有一上来就在所有机器人联合空间里暴力搜索,而是先单机规划,再冲突修正,最后联合优化。
第二,近距离无人机规划不能只看碰撞。
无人机之间即使没有几何碰撞,也可能因为气流扰动而影响安全和轨迹跟踪。
第三,先粗后精是很实用的工程策略。
允许小的不连续,可以让搜索更容易;最后再用优化把轨迹修成真实可执行版本。
记住一句话:
db-ECBS 想解决的不是"多机器人怎么排队不撞",而是"多种机器人在真实动力学和相互干扰下,怎么一起安全、高效地运动"。