介绍
条纹结构光是基于三角测量的测距技术,本文简要说明一下三角测量原理,介绍条纹结构光的单双目系统如何构成三角测量所需测量条件,并对比两个系统。
三角测量
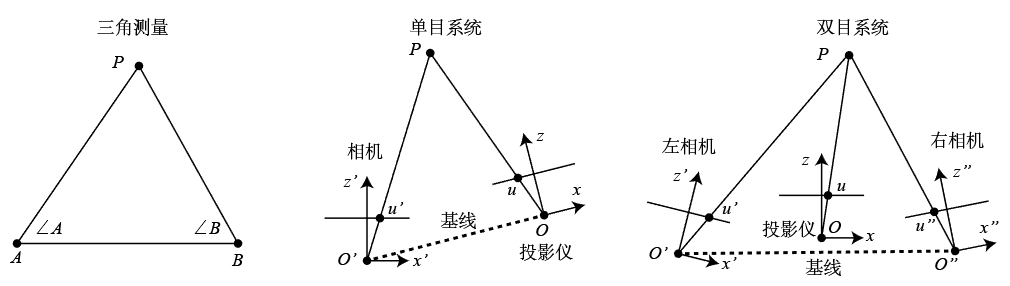
三角测量原理非常简单。如上图中左图所示,对于三角形△ABP\bigtriangleup ABP△ABP,如果已知边ABABAB的长度和∠A\angle A∠A、∠B\angle B∠B的大小,那么可以唯一确定PPP点的位置。
单目系统测距
单目系统由单个相机和单个投影仪构成。相机光心O′O'O′和投影仪光心OOO的连线构成了三角测量的边,被称为基线。投影仪投射图像的过程与相机成像过程相反,可以看作是一台"逆相机"。先按照计算机视觉中的相机模型对投影仪和相机进行标定,获取内参和外参,然后对相机采集的条纹图像进行解码,得到相机像素坐标u′u'u′对应的投影仪像素坐标u′u'u′,最后结合标定获得的内外参,得到∠u′O′O\angle u'O'O∠u′O′O和∠uOO′\angle uOO'∠uOO′的大小。两个角度与基线共同构成了三角测量的基础,从而实现对点PPP位置的测量。
双目系统测距
双目系统由两个相机和一个投影仪构成。双目系统中,左相机与投影仪、右相机与投影仪、左右相机之间均能构成三角测量关系,实现测距。不过,大多数情况下,使用左右相机构成的系统作为测距核心。左右相机光心O′O′′O'O''O′O′′的连线构成基线。首先对双相机进行内外参标定,然后对双相机采集的条纹图进行解码,若左相机像素坐标u′u'u′观察到投影仪像素坐标uuu投射的光线,则在右相机像素坐标中搜索匹配观察到相同光线的坐标u′′u''u′′,最后,结合标定获得的内外参,得到∠u′O′O′′\angle u'O'O''∠u′O′O′′和∠u′′O′′O′\angle u''O''O'∠u′′O′′O′,从而实现三角测量。在双目系统中,投影仪无需进行标定,主要用于投射图案补充纹理、方便实现同名点u′u'u′和u′′u''u′′的匹配。
两个系统对比
在条纹投影轮廓术中,选择单目系统(1个相机+1个投影仪)还是双目系统(2个相机+1个投影仪) ,本质上是在计算复杂度、测量精度和系统鲁棒性之间进行权衡。
以下是两种系统的详细对比:
1. 系统架构与基本原理
- 单目系统 (Monocular Setup): 将投影仪视为一个"逆向相机"。三维重建基于相机-投影仪单元的标定参数,通过三角测量(Triangulation)计算点云。
- 双目系统 (Binocular Setup): 投影仪仅作为提供人工纹理的工具。三维重建基于左相机-右相机单元的标定参数,通过相位匹配(Phase Matching)寻找同名点进行重建。
2. 深度对比:单目 vs 双目
| 比较维度 | 单目系统 (Camera-Projector) | 双目系统 (Camera-Camera) |
|---|---|---|
| 硬件成本 | 低。仅需一个相机,结构紧凑。 | 高。多一个相机,体积较大。 |
| 标定难度 | 高。投影仪标定复杂(需投射条纹辅助),且其畸变模型较难精确描述。 | 低。基于成熟的双目相机标定,投影仪甚至不需要严格标定(仅需保证对比度)。 |
| 重建精度 | 受限于投影仪。投影仪的光学非线性、镜头畸变残差、温漂直接进入重建误差。 | 高且稳定。精度取决于两个相机的像素分辨率和基线长度,对投影仪质量不敏感。 |
| 计算复杂度 | 小。直接建立相机像素坐标与投影仪像素坐标的对应关系。 | 大。需要进行双相机的相位匹配、极线搜索和双目重建。 |
3. 核心优缺点总结
单目系统:轻快灵活的方案
- 优点:
- 效率高: 不需要进行复杂的双目匹配,计算速度快,适合实时检测。
- 紧凑型: 设备体积小,易于集成到手持设备或受限空间中。
- 缺点:
- 误差敏感: 如果投影仪在使用过程中受热产生温漂(镜头变形),标定会失效,产生较大的系统误差。
- 模型依赖: 必须精确标定投影仪的所有内外参数。
双目系统:精密工业的标配
- 优点:
- 解耦投影误差: 投影仪只管"打光",它的位置稍微动一下或者画面有点模糊,只要左右相机能识别出相位特征,重建精度几乎不受影响。
- 高稳健性: 在工业现场环境中,相机的热稳定性通常优于投影仪,双目结构能维持长期的测量一致性。
- 缺点:
- 数据量大: 处理两路高清图像流,对计算机算力有一定要求。
- 匹配冗余: 在处理复杂遮挡时,若其中一个相机看不见条纹,该点将无法重建。