CenterPoint:不用锚框也能做3D检测?无锚框方法的革命
作者:小探 | 首发:探物 AI | 序列:3D感知网络的第3篇文章 | 转载请注明出处
上一篇我们学习了PointPillars,理解了如何用柱子化将3D点云转为伪图像实现实时检测。但PointPillars需要设计大量锚框,正负样本严重不平衡。这一篇我们来看CenterPoint------一个不用锚框、直接检测物体中心的3D检测方法,既快又准,成为当前主流!
一、从锚框检测到无锚框检测
1.1 锚框检测(PointPillars)的贡献?
PointPillars的贡献:
✅ 实时3D检测(62 FPS)
✅ 端到端训练
✅ 工业可用
PointPillars的问题:
❌ 需要设计锚框(先验知识)
❌ 锚框数量巨大(每个位置多个锚框)
❌ 正负样本不平衡(大部分锚框是负样本)
❌ 锚框尺寸需要针对数据集调整1.2 锚框检测的具体问题
问题1:锚框设计需要先验知识
不同数据集需要不同的锚框:
- KITTI:车辆 (4.0, 1.6, 1.5)
- nuScenes:车辆 (4.5, 1.8, 1.5)
- Waymo:车辆 (4.7, 1.9, 1.5)
问题:
- 需要统计每个数据集的目标尺寸
- 不同类别需要不同锚框
- 迁移性差,但是话说过来工业恒定场景非常合适
问题2:正负样本不平衡
每个位置生成2-6个锚框
100×100网格 × 6锚框 = 60,000个锚框
实际目标可能只有几个!
正样本:~100个
负样本:~59,900个
比例:1:600
问题:
- 训练困难(大量简单负样本)
- 需要复杂的采样策略
问题3:锚框编码复杂
锚框 → 预测偏移量
需要编码:Δx, Δy, Δz, Δw, Δl, Δh, Δyaw
问题:
- 编码/解码复杂
- 需要NMS后处理
- 容易产生重复检测1.3 无锚框检测的核心思想
无锚框检测(CenterPoint):
不预测锚框的偏移,直接预测物体的中心点!
传统方法:
锚框 → 预测偏移 → 解码 → NMS → 结果
CenterPoint:
直接预测中心点 → 回归尺寸 → 结果
优势:
✅ 不需要设计锚框
✅ 不需要NMS(每个中心点只预测一次)
✅ 正负样本更平衡
✅ 训练更简单1.4 发展路线
PointPillars (2019)
│ 锚框检测,62 FPS
↓
CenterPoint (2021)
│ 无锚框检测,中心点检测
↓
CenterPoint + 速度估计
│ 加入时序信息
↓
TransFusion (2022)
│ Transformer融合
↓
StreamPETR (2023)
│ 流式Transformer
↓
自动驾驶实际部署二、CenterPoint的核心思想
2.1 一句话概括
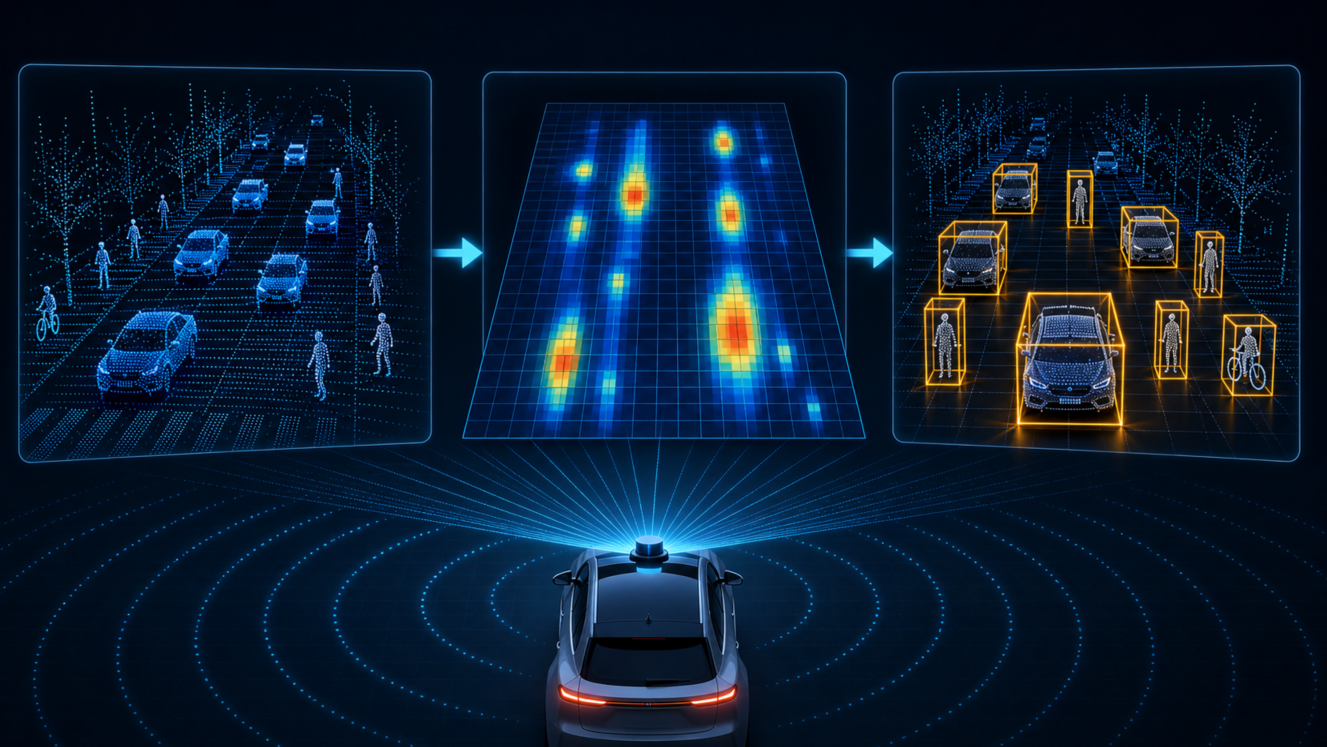
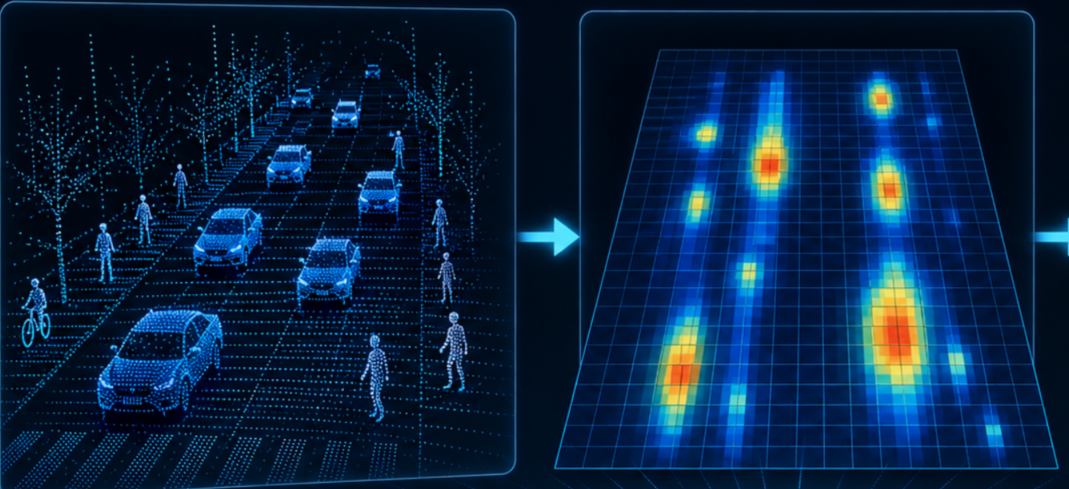
将3D检测转化为中心点热力图预测,直接检测物体中心,然后回归3D尺寸和朝向,无需锚框和NMS。
2.2 与PointPillars的本质区别
PointPillars(锚框方法):
1. 生成大量锚框(60,000+)
2. 预测每个锚框的偏移
3. 解码得到边界框
4. NMS去除重复
CenterPoint(无锚框方法):
1. 预测中心点热力图
2. 在热力图上找峰值(物体中心)
3. 直接回归每个中心的3D属性
4. 无需NMS!
对比:
┌──────────────┬──────────────┬──────────────┐
│ │ PointPillars │ CenterPoint │
├──────────────┼──────────────┼──────────────┤
│ 检测方式 │ 锚框偏移 │ 中心点热力图 │
│ 锚框数量 │ ~60,000 │ 0 │
│ 正负样本比 │ 1:600 │ 更平衡 │
│ NMS │ 需要 │ 不需要 │
│ 训练难度 │ 较难 │ 较易 │
│ 速度 │ 62 FPS │ 15-30 FPS │
│ 精度 │ 较高 │ 更高 │
└──────────────┴──────────────┴──────────────┘2.3 CenterPoint的三大步骤
步骤1:中心点热力图预测
预测每个类别的物体中心位置
步骤2:3D属性回归
对每个中心点,回归3D尺寸、朝向、高度等
步骤3:后处理(可选)
简单的阈值过滤,无需NMS图解整体流程:
输入点云 [N×4]
│
↓
┌─────────────────────────────────────────────┐
│ 步骤1:特征提取(PointPillars骨干) │
│ │
│ - 柱子化 │
│ - 2D卷积骨干 │
│ - 特征金字塔 │
└─────────────────────────────────────────────┘
│
↓
BEV特征图 [C×H×W]
│
↓
┌─────────────────────────────────────────────┐
│ 步骤2:中心点热力图预测 │
│ │
│ - 对每个类别预测热力图 │
│ - 热力图峰值 = 物体中心 │
│ - 无需锚框! │
└─────────────────────────────────────────────┘
│
↓
热力图 [K×H×W]
(K个类别)
│
↓
┌─────────────────────────────────────────────┐
│ 步骤3:3D属性回归 │
│ │
│ - 对每个中心点回归: │
│ - 3D尺寸 (w, l, h) │
│ - 高度 z │
│ - 朝向角 yaw │
│ - 速度 (vx, vy) │
└─────────────────────────────────────────────┘
│
↓
3D检测结果:
- 中心点位置 (x, y)
- 高度 z
- 尺寸 (w, l, h)
- 朝向 yaw
- 速度 (vx, vy)
- 类别 + 置信度2.4 为什么这样做更好?
1. 不需要锚框设计
- 不需要统计目标尺寸
- 不同数据集通用
- 迁移性好
2. 正负样本更平衡
- 只在物体中心附近是正样本
- 其他位置是负样本
- 比例更合理
3. 不需要NMS
- 每个物体只有一个中心点
- 热力图峰值天然去重
- 后处理更简单
4. 训练更简单
- 损失函数更直观
- 不需要复杂的采样策略
- 收敛更快
5. 精度更高
- 中心点定位更准
- 减少锚框带来的误差三、CenterPoint的网络结构详解
3.1 整体架构
输入点云
│
↓
┌─────────────────────────────────────────────┐
│ PointPillars特征提取 │
│ │
│ 柱子化 → 柱子编码器 → 伪图像 │
│ → 2D骨干网络 → 特征金字塔 │
└─────────────────────────────────────────────┘
│
↓
BEV特征图 [C×H×W]
│
├──→ 中心点热力图头 ──→ 热力图 [K×H×W]
│
├──→ 尺寸回归头 ──→ 尺寸图 [3×H×W]
│
├──→ 高度回归头 ──→ 高度图 [1×H×W]
│
└──→ 朝向回归头 ──→ 朝向图 [2×H×W]
│
↓
后处理 → 3D检测结果3.2 中心点热力图预测(核心创新)
核心思想:用热力图表示物体中心位置,峰值处即为中心
python
class CenterPointHead(nn.Module):
def forward(self, bev_feat):
return {
"heatmap": self.heatmap_head(bev_feat), # 中心点概率图
"size": self.size_head(bev_feat), # w, l, h
"height": self.height_head(bev_feat), # z
"orientation": self.orientation_head(bev_feat), # sin(yaw), cos(yaw)
"velocity": self.velocity_head(bev_feat), # vx, vy(可选)
}初始化部分本质上就是几组卷积头:一个负责"哪里是中心",其余负责"这个中心对应的3D属性"。
热力图图解:
3.3 高斯热力图生成(标签编码)
python
def generate_heatmap(targets):
heatmap = zeros([num_classes, H, W])
for x, y, cls_id in targets:
cx, cy = world_to_grid(x, y)
draw_gaussian(heatmap[cls_id], center=(cx, cy), sigma=sigma)
return heatmap高斯热力图图解:
单个物体的热力图标签:
真实中心点:(10, 20)
高斯核大小:sigma = 2
热力图值分布:
18 19 20 21 22
8 [ 0.0 0.0 0.0 0.0 0.0 ]
9 [ 0.0 0.1 0.2 0.1 0.0 ]
10 [ 0.0 0.3 0.8 0.3 0.0 ] ← 中心行
11 [ 0.0 0.1 0.2 0.1 0.0 ]
12 [ 0.0 0.0 0.0 0.0 0.0 ]
中心值最高(接近1),周围逐渐衰减
为什么用高斯而不是二值?
- 二值:只有中心是1,其他是0
- 高斯:中心附近都有值
- 优势:提供更多监督信号,训练更稳定3.4 3D属性回归
python
def decode_predictions(pred):
peaks = find_local_peaks(pred["heatmap"], threshold=0.3)
boxes = []
for cls_id, y, x, score in peaks:
center = grid_to_world(x, y)
size = read_at(pred["size"], y, x)
z = read_at(pred["height"], y, x)
yaw = decode_yaw(read_at(pred["orientation"], y, x))
boxes.append((center, z, size, yaw, cls_id, score))
return boxes解码过程图解:
热力图:
┌─────────────────────────────────────┐
│ │
│ ▓▓▓ │ ← 峰值位置
│ ▓▓▓ │
│ │
└─────────────────────────────────────┘
找到峰值位置 (x_idx, y_idx)
在该位置读取回归值:
- 高度图 → z = 0.5m
- 尺寸图 → w=1.6m, l=4.0m, h=1.5m
- 朝向图 → sin(yaw)=0.5, cos(yaw)=0.866 → yaw=30°
组装3D检测框:
(x, y, 0.5, 1.6, 4.0, 1.5, 30°)3.5 损失函数
python
loss = focal_loss(pred["heatmap"], target["heatmap"])
for name in ["size", "height", "orientation", "velocity"]:
# 只在真实中心点附近计算属性回归损失
loss += l1_loss(pred[name], target[name], mask=target["center_mask"])损失函数图解:
热力图损失(Focal Loss):
正样本(中心点):loss = -(1-p)^α * log(p)
负样本(其他):loss = -(1-t)^β * p^α * log(1-p)
效果:
- 正样本:预测越准,损失越小
- 负样本:简单负样本损失小,难负样本损失大
- 解决正负样本不平衡
属性损失(L1 Loss):
只在热力图峰值位置计算
位置 (10, 20):
预测:w=1.5, l=3.9, h=1.4
真实:w=1.6, l=4.0, h=1.5
损失:|1.5-1.6| + |3.9-4.0| + |1.4-1.5| = 0.3
其他位置:不计算损失四、CenterPoint代码骨架(精简版)
4.1 网络前向流程
python
class CenterPoint(nn.Module):
def forward(self, pillars, indices, num_points, grid_size):
pillar_feat = self.pillar_encoder(pillars, indices, num_points)
pseudo_image = create_pseudo_image(pillar_feat, indices, grid_size)
bev_feat = self.backbone(pseudo_image)
bev_feat = self.fpn(bev_feat)
return self.head(bev_feat)4.2 训练流程
python
for batch in train_loader:
pred = model(batch["pillars"], batch["indices"], batch["num_points"], grid_size)
loss = centerpoint_loss(pred, batch["targets"])
optimizer.zero_grad()
loss.backward()
optimizer.step()五、CenterPoint的改进版本
5.1 加入时序信息(CenterPoint-Temporal)
问题:单帧检测无法估计速度
解决:融合多帧信息
CenterPoint-Temporal:
当前帧特征 → 检测
↓
上一帧特征 → 检测 → 变换到当前帧
↓
融合 → 更准确的检测 + 速度估计
python
current_feat = detector.extract_features(current_points)
previous_feat = detector.extract_features(previous_points)
# 先把上一帧对齐到当前帧坐标系,再融合
previous_feat = warp_to_current_frame(previous_feat, ego_motion)
fused_feat = temporal_fusion(current_feat, previous_feat)
pred = detector.head(fused_feat)5.2 加入速度估计
python
# 单帧:直接从当前BEV特征预测速度
velocity = velocity_head(current_feat)
# 多帧:加入"当前帧 - 上一帧"的特征差,速度更稳定
velocity = velocity_head(concat([current_feat, current_feat - previous_feat]))5.3 CenterPoint vs PointPillars
KITTI数据集对比:
┌─────────────────┬───────────┬───────────┬───────────┐
│ 方法 │ AP Easy │ AP Mod │ AP Hard │
├─────────────────┼───────────┼───────────┼───────────┤
│ PointPillars │ 82.58 │ 74.31 │ 68.99 │
│ CenterPoint │ 85.62 │ 77.45 │ 72.13 │
└─────────────────┴───────────┴───────────┴───────────┘
nuScenes数据集对比:
┌─────────────────┬───────────┬───────────┬───────────┐
│ 方法 │ NDS │ mAP │ FPS │
├─────────────────┼───────────┼───────────┼───────────┤
│ PointPillars │ 45.3 │ 30.5 │ 62 │
│ CenterPoint │ 67.3 │ 59.6 │ 15 │
└─────────────────┴───────────┴───────────┴───────────┘
结论:
CenterPoint精度更高,但速度较慢
适合对精度要求高的场景六、CenterPoint在自动驾驶中的应用
6.1 检测流水线
python
def detect(point_cloud):
pillars = preprocess(point_cloud)
pred = model(pillars)
boxes = decode_predictions(pred)
boxes = filter_by_score(boxes, threshold=0.3)
return topk(boxes, k=100)6.2 与其他传感器融合
python
lidar_result = lidar_detector(lidar_points)
if camera_images is not None:
camera_result = camera_detector(camera_images)
result = fuse(lidar_result, camera_result)
else:
result = lidar_result七、常见问题解答(FAQ)
Q1: CenterPoint为什么不需要NMS?
答:
传统方法(PointPillars):
- 每个位置有多个锚框
- 一个物体可能被多个锚框检测到
- 需要NMS去除重复
CenterPoint:
- 每个物体只有一个中心点
- 热力图峰值天然去重
- 每个峰值只预测一个物体
图解:
PointPillars: CenterPoint:
┌───┬───┬───┐ ┌───┬───┬───┐
│ A │ A │ │ │ │ ● │ │
├───┼───┼───┤ ├───┼───┼───┤
│ A │ A │ │ │ │ │ │
└───┴───┴───┘ └───┴───┴───┘
A = 锚框(多个) ● = 中心点(一个)
需要NMS去重 不需要NMSQ2: 热力图峰值检测怎么实现?
答:
方法1:最大值池化
- 3x3最大值池化
- 找局部最大值
- 简单有效
方法2:阈值过滤
- 热力图值 > 阈值
- 可能有多个点
- 需要后处理
方法3:非极大值抑制
- 对热力图做NMS
- 更精确
- 计算量稍大
常用方法:最大值池化 + 阈值过滤Q3: CenterPoint的速度为什么比PointPillars慢?
答:
原因1:检测头更复杂
PointPillars:分类 + 回归
CenterPoint:热力图 + 尺寸 + 高度 + 朝向 + 速度
原因2:后处理不同
PointPillars:简单NMS
CenterPoint:峰值检测 + 解码
原因3:精度更高
更复杂的网络 → 更高的精度
解决方法:
1. 轻量化骨干网络
2. 优化后处理
3. TensorRT加速Q4: 如何处理遮挡物体?
答:
CenterPoint本身不处理遮挡
解决方法:
1. 时序融合
- 融合多帧信息
- 利用历史位置
2. 多传感器融合
- LiDAR + Camera
- 不同视角互补
3. 3D占用感知
- 预测遮挡区域
- 结合CenterPoint使用
实际系统:
CenterPoint(快速检测)
+ 时序融合(速度估计)
+ 占用感知(遮挡处理)Q5: CenterPoint能检测多远的物体?
答:
取决于激光雷达和设置
典型设置:
- KITTI:0-70m
- nuScenes:0-100m
- Waymo:0-150m
远处物体的问题:
- 点数少(稀疏)
- 热力图峰值弱
- 检测困难
解决方法:
1. 多尺度特征(FPN)
2. 远处用更大的感受野
3. 结合Camera(远处更清晰)八、总结:CenterPoint的精髓
8.1 核心思想
- 中心点热力图:用热力图表示物体中心,峰值处即为中心
- 无锚框:不需要设计锚框,直接预测中心点
- 属性回归:对每个中心点回归3D属性
- 无需NMS:热力图峰值天然去重
8.2 一句话总结
CenterPoint通过将3D检测转化为中心点热力图预测,直接检测物体中心并回归3D属性,无需锚框和NMS,实现了更高的精度和更简洁的设计。
8.3 关键创新
| 创新 | 作用 |
|---|---|
| 中心点热力图 | 直接预测物体中心 |
| 无锚框设计 | 不需要先验知识 |
| Focal Loss | 处理正负样本不平衡 |
| 属性回归 | 直接预测3D属性 |
8.4 下一步学习
- 3D占用感知:从检测到分割,完整场景理解
- BEVFormer:鸟瞰图视角的多传感器融合
- TransFusion:Transformer融合
附录:关键术语表
| 术语 | 英文 | 含义 |
|---|---|---|
| 无锚框 | Anchor-Free | 不使用预定义锚框的检测方法 |
| 热力图 | Heatmap | 表示物体中心概率的2D图 |
| Focal Loss | - | 处理正负样本不平衡的损失函数 |
| NMS | Non-Maximum Suppression | 非极大值抑制 |
| BEV | Bird's Eye View | 鸟瞰图视角 |
| 峰值检测 | Peak Detection | 在热力图上找局部最大值 |
下期预告:《从检测到感知------3D占用网格如何让自动驾驶"看穿"遮挡?》