目录
[2、分辨率 & 视场角自由配置](#2、分辨率 & 视场角自由配置)
[3、物理级 HDR 真实光照成像](#3、物理级 HDR 真实光照成像)
一、引言
想象一下:你开发了一套自动驾驶相机感知算法 ,需要验证它在强光逆光、暴雨、摄像头镜面被泥水污染等极端场景下是否稳定可靠。
现实道路测试?
-
等一场大雨需要时间
-
制造一场大雾需要运气
-
一次完整的实车路测动辄百万成本
-
某些危险场景根本无法在公共道路上重现
这就是整个自动驾驶行业的共同痛点 :真实数据稀缺、场景覆盖率低、测试成本居高不下。
传统的硬件在环(HiL)测试 虽然能解决部分电控验证问题,但却难以真实模拟 传感器的物理感知过程,尤其是相机传感器的光学特性、成像质量以及复杂环境下的视觉退化。这就是为什么越来越多的 Tier1 和 OEM 开始将目光投向高保真传感器仿真平台。
那么,有没有一种方法,能够在实验室 里就精确模拟 出强光逆光、暴雨、泥污污染这些极端场景下的相机成像 ?这正是高保真传感器仿真平台需要解决的问题。下面,我们以aiSim为例,从传感器覆盖、相机模型、分辨率配置、HDR渲染到全栈可调参数,逐一拆解其技术实现。
二、全品类传感器统一仿真

aiSim 仿真核心
aiSim 依托自研 AIR 引擎 ,基于 Khronos Vulkan API 构建统一的 GPU 渲染管线,目前支持超过20 种传感器模型,覆盖主流自动驾驶感知体系:
-
**相机传感器(Camera):**支持光栅化与光线追踪两种渲染模式
-
**LiDAR 传感器:**支持旋转式与固态,可输出带语义的三维点云
-
**雷达传感器:**含高层目标列表与底层雷达目标仿真,支持多径反射建模
-
**GPS / IMU 传感器:**支持噪声注入的惯性导航仿真
-
此外,还有超声波传感器 、占用栅格传感器等多类 CPU 处理传感器
所有传感器均工作在统一的物理坐标系 下,支持多传感器联合仿真,输出可直接对接感知算法验证流水线。
aiSim GUI 传感器配置
三、详解相机:物理级仿真核心能力
相机 是自动驾驶感知的核心器件之一,其仿真保真度直接影响算法训练数据和测试结果的可信度。aiSim 基于自研 AIR 引擎,可实现物理级相机传感器的仿真渲染。
1、覆盖全场景的多种相机模型
aiSim 支持以下多种主流相机畸变模型:

每种模型配备独立的畸变参数(如焦距 focal_length、主点 principal_point、畸变系数 distortion_coefficients),精确还原真实镜头的光学特性。
3DGS地图下的多样化相机模型示例
(Perspective、OCam Fisheye、OpenCV Pinhole)
2、分辨率 & 视场角自由配置
相机的水平与垂直分辨率可在0 到 32768 像素 之间自由设置 (width / height),满足从低分辨率 IoT 摄像头到高分辨率感知相机的全覆盖需求。
视场角通过 render_y_fov 参数控制(范围 1°~180°),对于视场角超过 120° 的广角相机,推荐使用 Cube_6_Face六面体环境映射 以确保无盲区覆盖。此外,Auto_* 系列自动模式能根据传感器畸变分布自动选取 最优渲染策略,免去手动调参的烦恼。
3、物理级 HDR 真实光照成像
aiSim 的核心渲染哲学是"全链路物理光照 "------从光源(太阳辐照度 120,000 lx、IES 人工光、天空模型)到材质(PBR 材质、Cook-Torrance BRDF),再到相机成像,完整遵循渲染方程。
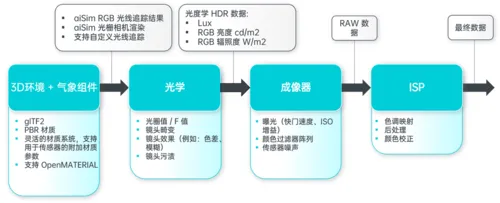
aiSim 相机传感器成像工作流
HDR 数据 存储在线性色彩空间(sRGB)中,默认采用 16 位浮点 RGB 格式(值 6.55×10⁴,精度 3.31 位小数),也可切换为 32 位浮点格式获得更高精度(值 3.4×10³⁸,精度 7.22 位小数)。
HDR 数据还可导出为EXR 或 DDS 格式 ,Alpha 通道携带表面辐照度(单位:lux);将 RGB 三元组从 sRGB 转换到 CIE XYZ 色彩空间后,Y 分量即为亮度值(单位:cd/m²),直接支持光度学分析。

不同参数下的光照渲染效果
4、全链路可调参数
aiSim 相机传感器提供了业界罕见 的全栈参数开放能力:
(1)光学参数
**-景深(DoF):**focus_distance(焦距,支持 infinity)、aperture_diameter(光圈直径,置 0 关闭 DoF)、sensor_size_scaling_number(像元尺寸,默认 4μm)
(2)成像管线参数
**- 曝光控制:**支持手动(F值 f_stop、快门速度 shutter_speed、ISO sensitivity)与自动(基于平均亮度 AutoFromAverageLuminance、基于 LUT AutoFromExposureLUT)多种模式
**- RAW 传感器输出:**通过 AimRawCFA16 模式模拟 CMOS/CCD 信号处理流程,支持 rgb_radiant_exposure_to_voltage(辐射曝光转电压)、analog_gain、adc_bit_precision(ADC 位深)等底层参数
**- 卷帘快门(Rolling Shutter):**逐行采样动态对象状态,精确重现运动模糊与卷帘畸变(需开启光线追踪)
(3)渲染质量参数
**- 光线追踪:**samples_per_pixel(每像素采样数)、max_depth(弹射深度)、denoiser_type(Intel OIDN 2.0 降噪,支持 Low/Balanced/High 三档)
**- 后处理:**色调映射(Filmic / FilmicACES / Reinhard / AMDFidelityFXLPM 等多种算法)、色彩校正、饱和度、Bloom、SSAO、SMAA 等
**- 色差(Chromatic Aberration):**基于 STN 模型,可独立平移红/绿/蓝通道,模拟真实镜头色散
(4)环境干扰参数
**- 传感器污染(Sensor Blockage):**支持泥污(Mud)和冷凝(Condensation)两种污染类型,bias 参数控制污染程度(0~100),seed 控制随机分布
**- 运动模糊:**基于每像素速度图,精确计算运动方向与模糊程度

aiSim 景深、光晕、色差示例
四、结语
从物理光照建模到镜头畸变还原,从HDR成像链路到底层RAW信号模拟,aiSim在相机传感器仿真的每个环节都提供了可量化 的参数配置接口 。其核心特征在于:覆盖11种 镜头畸变模型、支持0~32768像素分辨率 连续可调、实现了全链路物理光照 的HDR成像,并将光学、成像管线、渲染质量与环境退化参数全面开放。
这里是康谋,欢迎互动交流~
aiSim自动驾驶仿真平台 - 端到端智驾仿真工具 | 高保真环境模拟和场景重建 | 软件在环测试 | 康谋科技![]() https://keymotek.com/adas-simulator-aisim/
https://keymotek.com/adas-simulator-aisim/