在前一篇 GMR 工程梳理里(传送门),我主要总结的是"已有动作数据集如何重定向到机器人"。例如 AMASS中的 SMPL-X 动作,本身已经是一份结构化的人体运动数据;GMR 要做的是把这份人体动作送入机器人运动学模型,通过 IK 配置求解出目标机器人的 root 和关节轨迹。
这篇文章讨论的是另一个问题:如果我们不想只依赖公开动作数据集,而是希望自己录制动作,让机器人学习真实人体示教,应该怎么做?
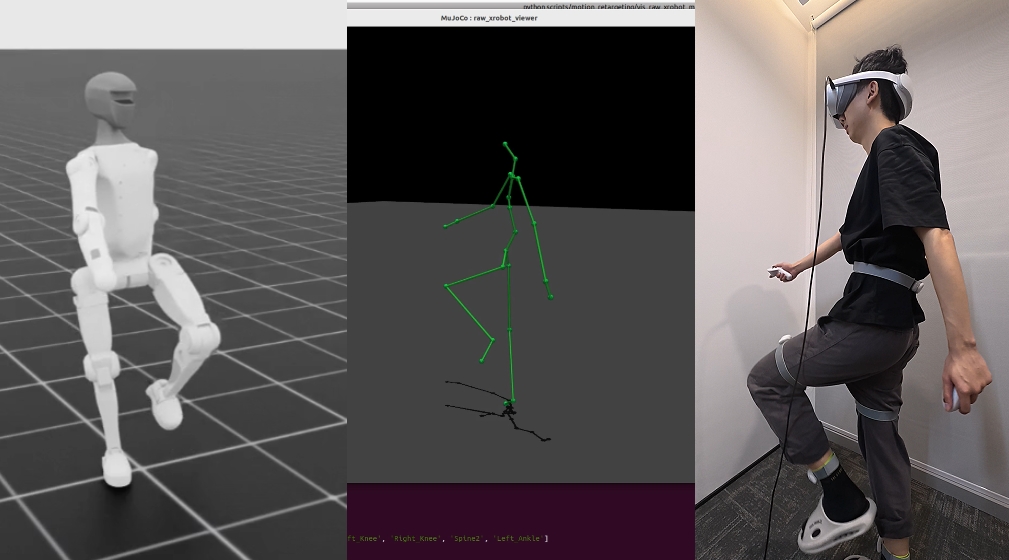
本文打通的流程是:使用 PICO 和 tracker 完成人体动作采集,通过 XRoboToolkit 获取实时人体骨架,再把这份骨架保存成 raw 动作数据,最后接入 GMR 的重定向框架,生成指定机器人的动作文件。
整体链路可以概括为:
text
真人动作
-> PICO 头显 / 手柄 / 5 个 tracker
-> PICO full-body tracking
-> XRoboToolkit Unity Client
-> XRoboToolkit PC Service
-> Python 侧 xrobotoolkit_sdk
-> XRobot raw skeleton npz
-> GMR xrobot source
-> 指定机器人 IK retargeting
-> robot motion pkl
-> 后续强化学习 / 模仿学习训练需要强调的是,这里 PICO 并不是直接遥操作机器人。我们真正想要的是一条"动作数据生产Pipeline":把真人表演固化成可保存、可回放、可反复重定向的数据,再生成机器人训练需要的动作轨迹。
一、背景:为什么选择 PICO,以及 XRoboToolkit 提供了什么
1. 从光学动捕到消费级 XR 动捕
传统机器人模仿学习中,如果要采集高质量人体动作,最经典的方案是光学动捕系统。光学 MOCAP 的优势很明显:精度高、延迟低、标定成熟,尤其适合实验室环境下的高质量动作采集。但它也有一些现实问题:
- 系统成本高;
- 场地和相机布置要求高;
- 标定和维护成本高;
- 对普通开发者和小团队并不友好;
- 采集流程不够轻量,难以快速反复试动作。
而 PICO 这类 XR 设备的优势,恰好在于它足够轻量。它本身是一款成熟的商业产品,已经迭代到 PICO 4 系列,并且有面向企业场景的版本。头显、手柄、全身体感 tracker、软件生态和调试工具都已经比较完整。对于机器人动作采集来说,它不是要完全替代高端光学动捕,而是提供了一条更低成本、更容易部署、更适合快速实验的数据采集路线。
在我们当前的使用方式里,PICO 配合 5 个 tracker,形成一套约 7 点追踪的身体观测输入。PICO 端的 full-body tracking 会进一步将这些观测融合为一套 24 关节人体骨架。也就是说,我们并不是直接使用 tracker 的原始点位,而是使用 PICO 追踪系统已经估计好的 body skeleton。
这点非常重要。因为 5 个 tracker 本身并不能覆盖人体所有关节,但 PICO 内部会利用人体模型、头显、手柄和 tracker 信息估计完整身体姿态。我们在 Python 侧拿到的,就是这套已经融合后的骨架结果。

2. XRoboToolkit 是什么
要从 PICO 里拿到这些实时追踪数据,需要一个数据通道。这里用到的是 XRoboToolkit。
XRoboToolkit 是 PICO / XR-Robotics 公开提供的 XR 机器人遥操作和数据采集工具链。它的核心仓库主要包括:
- XRoboToolkit Unity Client: https://github.com/XR-Robotics/XRoboToolkit-Unity-Client
- XRoboToolkit PC Service: https://github.com/XR-Robotics/XRoboToolkit-PC-Service
Unity Client 运行在 PICO 端,负责选择和发送头显、手柄、手部、PICO Motion Tracker 等追踪数据。PC Service 运行在电脑端,负责和头显建立连接,并通过 SDK 对外提供这些 XR 状态。
官方 Unity Client 的说明中也可以看到,它支持同步 head tracking、controller tracking、hand tracking,以及 PICO Motion Tracker 的 full body tracking 数据。对我们来说,最有价值的正是 full-body tracking 输出的人体骨架。
不过,PC Service 官方提供的主要是 C++ SDK。为了让 Python 脚本直接读取这些数据,我们还需要一层 Python binding,也就是 xrobotoolkit_sdk。这层 binding 的作用很单纯:把 C++ SDK 中的接口包装成 Python 模块,让我们可以在 GMR 侧直接调用:
python
import xrobotoolkit_sdk as xrt
xrt.init()
body_poses = xrt.get_body_joints_pose()因此,当前流程中真正需要的 XRoboToolkit 部分是:
text
PICO Unity Client
-> PC Service
-> C++ SDK
-> Python binding xrobotoolkit_sdk
-> Python 中的人体骨架数据对于这条动作采集到重定向的 pipeline 来说,XRoboToolkit 的角色很明确:把 PICO 的追踪结果稳定地送到 Python。
3. 哪些是 GMR 已有能力,哪些是我们新增的工作
为了说清楚这条链路,必须区分"GMR 原本已经有的能力"和"为了 PICO 动捕我们新增的能力"。
GMR 原本已经具备的核心能力包括:
GeneralMotionRetargeting的 IK 重定向框架;- MuJoCo 机器人模型加载;
- 基于
mink.solve_ik()的机器人 IK 求解; - SMPL-X / BVH 等人体数据源到机器人动作的基本范式;
RobotMotionViewer等可视化工具;- 机器人 motion pkl 的保存格式。
也就是说,GMR 已经解决了"给定一份人体骨架目标,如何求解机器人动作"的大问题。
我们这次新增或迁移变体的工作,主要集中在 PICO/XRobot 数据源上:
- 新增 XRobot 数据读取:从
xrobotoolkit_sdk获取 PICO body tracking; - 新增 raw skeleton 录制:把 PICO 输出的 24 关节骨架保存为
xrobot_raw_skeleton_v1; - 新增 raw skeleton 回放:单独验证动捕源数据是否正确;
- 新增 XRobot 离线重定向:把 raw
.npz转成 robot.pkl; - 新增或迁移 XRobot 到目标机器人的 IK 配置,例如
xrobot_to_target_robot.json; - 对已有可视化/对比脚本做适配,使其能识别 XRobot raw
.npz。
因此,这条 pipeline 的本质不是重写 GMR,而是给 GMR 增加了一种新的人体数据来源:src_human="xrobot"。
二、从 PICO 到 raw 动作数据:先把人体骨架录下来

1. 为什么 raw 数据是这条链路的核心
在动捕重定向里,最容易犯的错误是直接看机器人动作。如果机器人动得不对,马上开始调 IK 配置。但实际上,问题可能出在前面任何一层:PICO 校准、tracker 佩戴、PC Service 数据流、坐标系转换、关节命名、IK 映射等。
所以我们把流程拆成两段:
text
第一段:PICO -> XRobot raw skeleton npz
第二段:XRobot raw skeleton npz -> robot motion pkl第一段只回答一个问题:PICO 给出的人体骨架准不准?
第二段才回答另一个问题:机器人能不能模仿这份人体骨架?
这样拆开之后,调试就清楚很多。如果 raw skeleton 回放已经很准,说明 PICO、tracker、PC Service 和基础坐标转换基本没问题;如果机器人动作仍然不对,问题就应该集中到 GMR 的 IK 配置、机器人模型或后处理上。
更重要的是,raw skeleton 是可复现的数据。一旦录下来,后面无论怎么修改 xrobot_to_target_robot.json,都可以用同一份 raw .npz 反复转换,而不需要每次重新穿戴设备表演动作。
2. XRobot body skeleton 的数据结构
XRoboToolkit 输出的 full-body tracking 数据,在 Python 侧可以整理成 24 个关节。典型关节包括:
text
Pelvis, Left_Hip, Right_Hip, Spine1, Left_Knee, Right_Knee,
Spine2, Left_Ankle, Right_Ankle, Spine3, Left_Foot, Right_Foot,
Neck, Left_Collar, Right_Collar, Head, Left_Shoulder, Right_Shoulder,
Left_Elbow, Right_Elbow, Left_Wrist, Right_Wrist, Left_Hand, Right_Hand每个关节在每一帧包含两个核心量:
text
position: [x, y, z]
rotation: [qx, qy, qz, qw]XRoboToolkit 原始姿态四元数通常以 xyzw 形式从 SDK 返回,而 GMR 内部使用 wxyz。因此在 Python 整理数据时,需要统一四元数顺序。
最终每一帧会变成 GMR 熟悉的结构:
python
{
"Pelvis": (position, quaternion_wxyz),
"Left_Hip": (position, quaternion_wxyz),
"Right_Hip": (position, quaternion_wxyz),
...
}这和 SMPL-X 前向计算之后得到的人体关节字典,在形式上是一致的。区别只是:SMPL-X 是由人体模型参数计算出来的,XRobot 是由 PICO 实时追踪系统估计出来的。
3. 坐标系转换:参考 GMR 中已有的 G1 样本
PICO / Unity 和 MuJoCo / GMR 的坐标系并不天然一致。XRobot 数据不能直接送入 GMR,否则会出现左右方向、身体朝向、四肢旋转都不对的问题。
这个部分我们没有从零拍脑袋设计,而是参考了 GMR 工程中已经配置好的 xrobot_to_g1.json 样本。G1 是 GMR 已经支持的 XRobot 重定向目标,它相当于提供了一个可用的坐标系参照:XRobot 数据应该怎样从 Unity/PICO 的表达迁移到 GMR 的人体目标表达,再怎样进入 MuJoCo 机器人坐标系。
在 XRobot 数据进入 Python 后,会先进行 Unity 到右手坐标系的变换。位置变换使用的矩阵为:
text
[[1, 0, 0],
[0, 0, -1],
[0, 1, 0]]旋转也必须做对应变换,不能只变位置。否则骨架点的位置可能看起来差不多,但各关节局部坐标系会错,进入 IK 后就会表现为手臂方向错误、脚掌方向异常、躯干旋转不自然等问题。
在迁移到 target_robot 时,我们沿着 G1 样本的思路处理 XRobot 坐标系,然后重新建立 XRobot 关节到 target_robot MuJoCo body 的映射。也就是说,坐标系处理参考的是 GMR 已有 XRobot->G1 的成功样本;机器人匹配关系和偏移,则需要针对target_robot 单独配置。
4. raw skeleton 文件保存什么
我们最终把 PICO 输出的人体骨架保存成 .npz,格式命名为:
text
xrobot_raw_skeleton_v1它主要包含:
python
{
"format": "xrobot_raw_skeleton_v1",
"fps": 30.0 or 50.0,
"joint_names": [...],
"positions": (T, 24, 3),
"rotations": (T, 24, 4),
"valid": (T, 24),
"timestamps": (T,)
}其中:
positions保存每帧每个关节的三维位置;rotations保存每帧每个关节的四元数,统一为wxyz;valid标记关节在该帧是否有效;fps是录制帧率;timestamps保留来自设备或控制器侧的时间信息。
这份 raw .npz 是整条 pipeline 中最重要的中间数据。它不是机器人动作,也不是训练文件,而是一份"人体动作源数据"。它的价值在于可以独立回放、独立检查,并且可以被多次重定向到不同机器人。
5. raw skeleton 的质量判断
判断动捕质量时,应该先看 raw skeleton,而不是看机器人。
如果 raw skeleton 本身已经和 PICO 数字人的动作一致,说明人体追踪源数据是可信的。此时如果机器人姿态不对,重点就应该转向 IK 配置。
如果 raw skeleton 本身就有明显问题,例如左右脚错位、骨盆漂移、腿长异常、身体姿态不连续,那么优先检查:
- tracker 是否正确绑定;
- PICO 端 full-body tracking 是否开启;
- tracker calibration 是否准确;
- PC Service 是否稳定接收 body data;
- 坐标系转换是否正确。
这个判断顺序很重要。它可以避免把动捕源数据的问题误判成机器人重定向的问题。
三、从 raw skeleton 到机器人重定向
1. 接入 GMR 的方式:新增 src_human="xrobot"
当 raw skeleton 已经可靠之后,后面的工作就回到了 GMR 熟悉的范式:给定人体目标,求机器人 IK。
区别在于,SMPL-X 流程中的人体目标来自 SMPL-X body model 前向计算,而 PICO 流程中的人体目标来自 XRobot raw skeleton。为了让 GMR 统一处理,我们把 XRobot 也注册成一种人体数据源:
python
retargeter = GeneralMotionRetargeting(
src_human="xrobot",
tgt_robot="target_robot",
actual_human_height=actual_human_height,
)这样,GMR 会加载对应的 IK 配置,例如:
text
general_motion_retargeting/ik_configs/xrobot_to_target_robot.json从这一层开始,流程和 SMPL-X 重定向非常相似:缩放人体骨架、应用偏移、设置 IK target、调用 mink.solve_ik(),最后得到机器人 qpos。
因此,robot motion pkl 的结构和前文 SMPL-X 流程是同一种产物。这里不再重复展开,仍然可以理解为:
text
root_pos + root_rot + dof_pos + fps后续训练接口也不需要关心动作来自 SMPL-X 还是 PICO,只要它已经变成目标机器人的 motion pkl 即可。
2. 不能把 24 个关节全部无脑送进 IK
XRobot raw .npz 里有 24 个关节,但 IK 配置并不一定使用全部关节。
例如对 target_robot 来说,我们真正关心的通常是:
- Pelvis / Spine3:身体主干;
- Left_Hip / Right_Hip:髋部参考;
- Left_Knee / Right_Knee:膝部参考;
- Left_Foot / Right_Foot:脚部落点和方向参考;
- Left_Shoulder / Right_Shoulder:肩部参考;
- Left_Elbow / Right_Elbow:肘部参考;
- Left_Wrist / Right_Wrist:手腕参考。
这些关节会被写入 xrobot_to_target_robot.json,并定义各自的权重、偏移和旋转修正。没有进入配置表的关节,不应该随便传入 GMR 的匹配任务。否则不仅没有意义,还可能因为缺少 scale/offset 定义导致错误。
因此,离线转换时的正确做法是:
text
读取 xrobot_to_target_robot.json
-> 提取实际参与 IK 的人体关节名
-> 从 raw skeleton 每帧中取出这些关节
-> 构造 human_data
-> 调用 retargeter.retarget(human_data)这也是我们为 XRobot raw 数据新增离线转换脚本的核心逻辑。
3. xrobot_to_target_robot.json 才是重定向效果的核心
最初机器人动作异常时,raw skeleton 已经很准确,但机器人姿态仍然明显不对。这说明问题不在 PICO,而在 IK 配置。
这里需要特别强调:不能简单把 smplx_to_target_robot.json 改成 XRobot 关节名就直接使用。SMPL-X、BVH、XRobot 虽然都描述人体,但它们的关节坐标系、旋转语义和骨架定义并不相同。
xrobot_to_target_robot.json 需要独立处理:
- XRobot 关节到 target_robot MuJoCo body 的对应关系;
- 每个匹配点的位置权重;
- 每个匹配点的旋转权重;
- 人体点位到机器人 body 的位置偏移;
- XRobot 坐标系到机器人目标坐标系的旋转偏移;
- 各关节在人体尺度和机器人尺度之间的缩放关系。
这份配置决定了"机器人应该用哪个 body 去追踪人体哪个关节",也决定了"追位置更重要,还是追方向更重要"。
实际调试中,一旦坐标系和旋转偏移修正到位,机器人动作会从非常怪异变成比较自然。这也说明 GMR 的 IK 框架本身是可用的,关键是给它正确的人体目标和正确的匹配表。
4. 脚踝和脚掌是最容易踩坑的部分
PICO tracker 绑在脚踝附近,但这并不等于它能精确追踪机器人意义上的脚踝关节方向,更不等于能完全还原脚掌姿态。
PICO 数字人看起来脚很稳定,是因为 PICO 内部的人体模型会做约束和补全。但我们在 GMR 中拿到的是 skeleton 结果,再把它映射到机器人脚部 IK,如果过度相信局部旋转,就可能让机器人踝关节出现内扣、上翻、扭转等问题。
所以脚部目标需要谨慎设计:
- 对脚部位置,可以相对更信任;
- 对脚部旋转,要结合实际效果设置权重;
- 对机器人踝关节,可以根据需要做 clamp 或 fixed 后处理;
- 对脚掌偏移,要结合机器人 toe/ankle link 的实际位置调。
这个问题不是 PICO 独有。只要用稀疏 tracker 推断完整人体骨架,再重定向到机器人,脚部通常都是最敏感的位置之一。
5. 最终形成的数据闭环
最终得到的 robot motion pkl 和 SMPL-X 重定向得到的 pkl 在下游看来是同类数据。也就是说,训练系统不需要知道动作来自 AMASS、BVH,还是来自 PICO。只要它已经被转换成目标机器人的 root 和关节轨迹,就可以进入同一套训练流程。
完整闭环可以概括为:
text
PICO 真人动作采集
-> XRobot raw skeleton npz
-> XRobot 到目标机器人的 GMR IK 配置
-> robot motion pkl
-> 训练格式转换
-> 强化学习 / 模仿学习
-> 机器人学会真人动作这就是这条 pipeline 的意义:PICO 不只是一个实时交互设备,而是成为了我们生产机器人动作数据集的入口。相比只使用公开数据集,这让我们可以根据任务需求自己设计动作、自己录制动作,并把动作接入已有的 GMR 和训练框架。
四、总结:这条链路解决了什么
这次打通的核心,不是某一个脚本,而是把三件事连接了起来:
- 使用 PICO 和 XRoboToolkit 低成本采集真人动作;
- 将 PICO 输出的人体追踪结果保存为可复现的 XRobot raw skeleton;
- 基于 GMR 的通用 IK 框架,把这份 raw skeleton 重定向成指定机器人的动作。
和光学动捕相比,PICO 方案的绝对精度不一定占优,但它有部署简单、成本低、商业产品成熟、可快速反复采集的优势。对于机器人学习中的动作原型验证和示教数据生成,这些优势非常实际。
和普通 SMPL-X 重定向相比,PICO/XRobot 流程最大的变化在输入端:人体动作不再来自公开数据集,而是来自我们自己的真人表演。GMR 原有的机器人 IK 框架仍然发挥核心作用,只是新增了 xrobot 这一类人体数据源,以及面向目标机器人的独立 IK 配置。
最终,当机器人真的通过训练学会这份 PICO 录制的动作时,就说明这条链路已经完成闭环:
text
真人动作 -> PICO 动捕 -> raw skeleton -> 机器人重定向 -> 训练 -> 机器人动作技能这也是我认为它最有价值的地方:它把"我做一个动作"变成了"我可以生产一份机器人可学习的动作数据"。
后续,我们将继续探索有关实时遥操的工程实现,例如TWIST2等文章都有相关的工作。