向量空间
1.成为线性空间的条件or其性质3.子空间/基的线性无关4.坐标表示5.空间的维度7.换基
向量空间?内容和之前提到的基本一样我上面还要单独列出来?
其实向量空间是将概念宏观化,将原来只能(箭头+线段)的向量扩大到只要符合条件就可以成为向量空间的"向量"。比如连续函数也可以是一个向量空间里面的"向量"部分
(大部分内容前面都提到过所以不再单独讲解)
向量空间和子空间
1.依旧遵循加法封闭乘法封闭封闭
2.0⃗\vec 00 −x⃗-\vec x−x 都是唯一的
子空间
1)条件:1.有0⃗\vec 00 2.对加法封闭 3.对乘法封闭
证明基张成子空间
基满足条件+能够表示处于这个子空间的向量

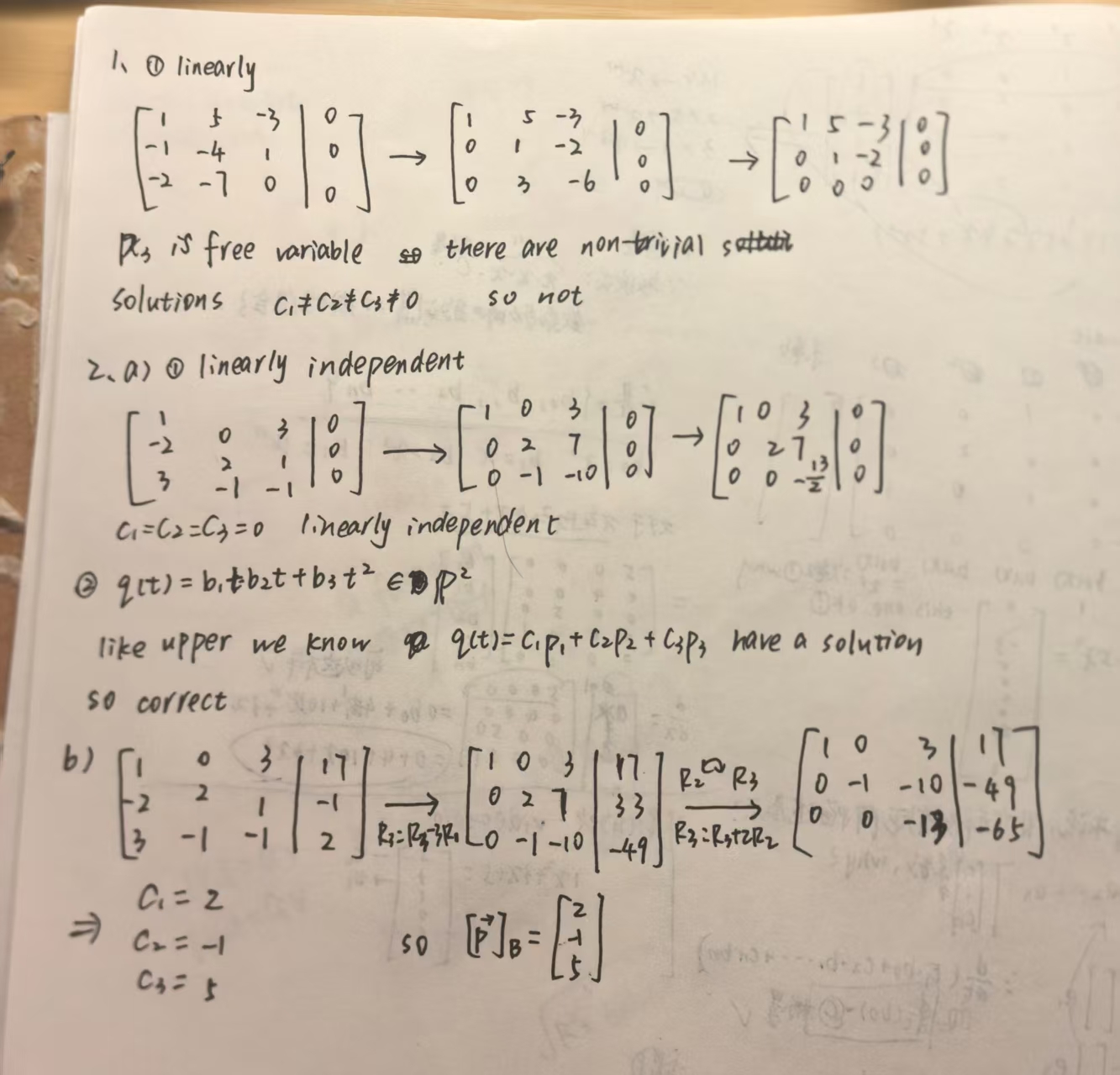
step1:证明线性无关
x1p(t)1+x2p(t)2+x3p(t)3=0x_1p(t)_1+x_2p(t)_2+x_3p(t)_3=0x1p(t)1+x2p(t)2+x3p(t)3=0
(1−4−20−21100750)\begin{pmatrix}1&-4&-2&0\\-2&1&1&0\\0&7&5&0\end{pmatrix} 1−20−417−215000
echelon form
(1−4−200−7−300020)\begin{pmatrix}1&-4&-2&0\\0&-7&-3&0\\0&0&2&0\end{pmatrix} 100−4−70−2−32000
所以{p⃗1p⃗2p⃗3\vec p_1 \vec p_2 \vec p_3p 1p 2p 3}线性无关
step2:证明能够构成其中空间中的向量
假设q⃗(t)=b1+b2t+b3t2\vec q(t)=b_1+b_2t+b_3t^2q (t)=b1+b2t+b3t2属于该空间
就有(1−4−2b1−211b2075b3)\begin{pmatrix}1&-4&-2&b_1\\-2&1&1&b_2\\0&7&5&b_3\end{pmatrix} 1−20−417−215b1b2b3
依旧可以得到解
所以这组基是子空间的基
2)S = {V1,....,VpV_1,...., V_pV1,....,Vp} be a set in VVV and HHH = span{vi,...,vpv_i,...,v_pvi,...,vp}
如果HHH不是0空间,那么SSS也是HHH的一组基;
如果SSS中的v⃗k\vec v_kv k是其他向量的线性组合出来的,那么除去这个向量依旧可以张成空间HHH
线性相关与基
1.
坐标系统
空间维度
向量空间VVV的维度就是他的基(满足线性无关条件!!!)的个数

换基
定义有:Let B={b1,...,bn}\mathcal{B} = \{\mathbf{b}_1, \dots, \mathbf{b}_n\}B={b1,...,bn} and C={c1,...,cn}\mathcal{C} = \{\mathbf{c}_1, \dots, \mathbf{c}_n\}C={c1,...,cn} be bases of a vector space VVV.
Then there is a unique matrix PC←BP_{\mathcal{C} \leftarrow \mathcal{B}}PC←B such that
xC=PC←BxB\\mathbf{x}{\mathcal{C}} = P{\mathcal{C} \leftarrow \mathcal{B}} \\mathbf{x}_{\mathcal{B}}xC=PC←BxB
More precisely,
PC←B=\[b1Cb2C...bnC].P_{\mathcal{C} \leftarrow \mathcal{B}} = \begin{bmatrix} \\mathbf{b}_1{\mathcal{C}} & \\mathbf{b}_2{\mathcal{C}} & \dots & \\mathbf{b}_n_{\mathcal{C}} \end{bmatrix}.PC←B=\[b1Cb2C...bnC].
The above equation implies (PC←B)−1xC=xB\left(P_{\mathcal{C} \leftarrow \mathcal{B}}\right)^{-1} \\mathbf{x}{\mathcal{C}} = \\mathbf{x}{\mathcal{B}}(PC←B)−1xC=xB. Thus (PC←B)−1=PB←C\left(P_{\mathcal{C} \leftarrow \mathcal{B}}\right)^{-1} = P_{\mathcal{B} \leftarrow \mathcal{C}}(PC←B)−1=PB←C.
也就是说,如果你想将基底从b转换到c,只需要找到b所对应的c`即可
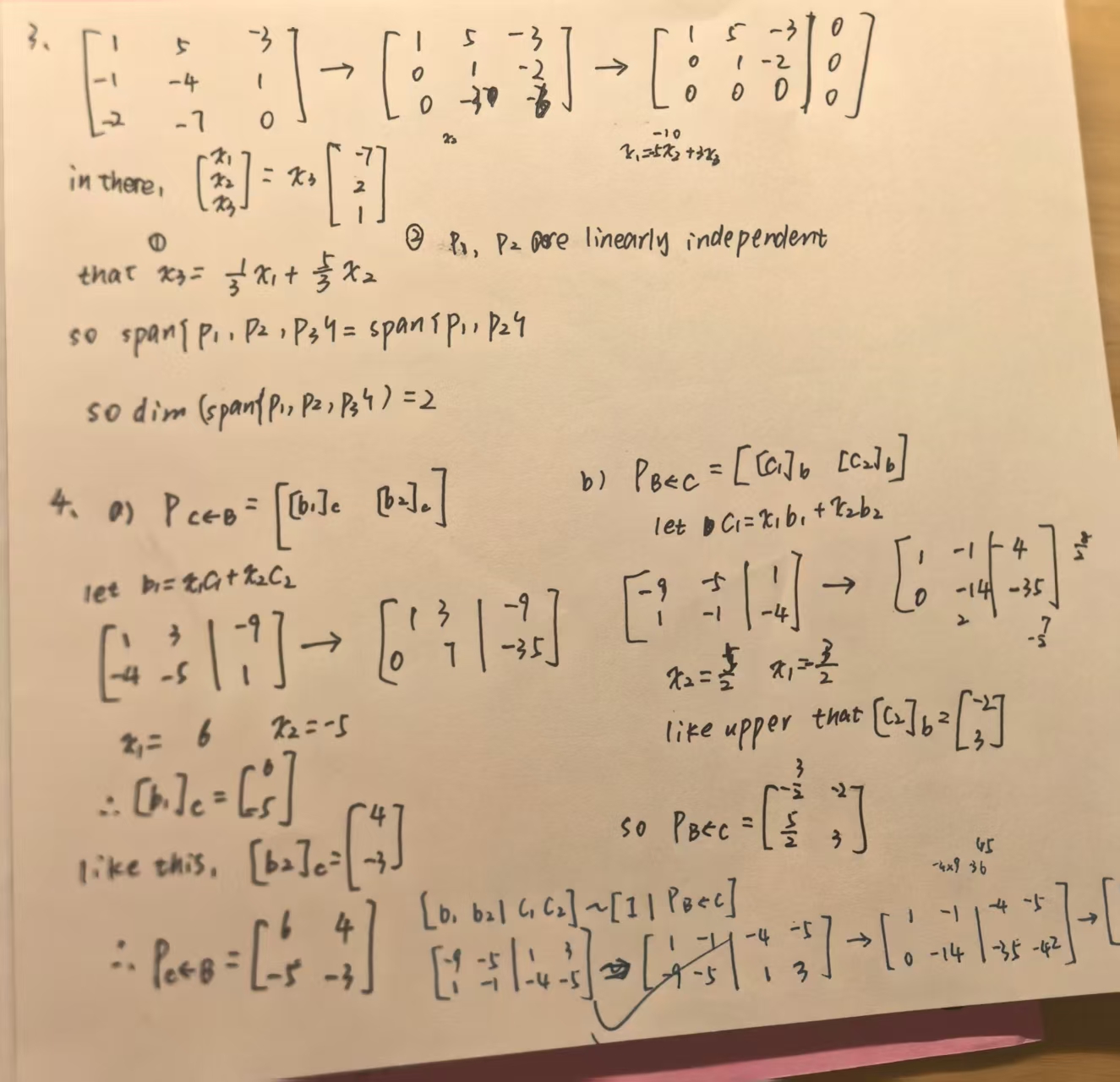
例题答案
拓展:线性代数和导数的联系
看上去,线性代数和导数不是一个东西,但在今天学了向量空间之后我们知道函数也可以是一个向量,那么函数就可以通过某些方式,写成类似于向量的存在,并且求导也可以写成线性代数的形式
首先,我们需要确定向量空间的基。我们就规定
向量的基{b0,b1,....bnb_0,b_1,....b_nb0,b1,....bn}并且满足关系:b0=x0=1,b1=x,b2=x2.....b_0=x^0=1,b_1=x,b_2=x^2.....b0=x0=1,b1=x,b2=x2.....
其次,多项式(函数)其实就是基数乘相加的结合,比如f(x)=3x4+x3+6x2−1f(x)=3x^4+x^3+6x^2-1f(x)=3x4+x3+6x2−1就是3∗b⃗4+1∗b⃗3+6∗b⃗2+0∗b⃗1−1∗b⃗)3*\vec b_4+1*\vec b_3+6*\vec b_2+0*\vec b_1-1*\vec b_)3∗b 4+1∗b 3+6∗b 2+0∗b 1−1∗b ),所以他是可以表示成向量(−10613)\begin{pmatrix}-1\\0\\6\\1\\3\end{pmatrix} −10613 的
并且,在求导的时候有一个特性和线性代数一样,就是倍数或者加法是可以单独列出来的
ddx(f(x)+g(x))=ddxf(x)+ddxg(x)\frac d{dx}(f(x)+g(x))=\frac d{dx}f(x)+\frac d{dx}g(x)dxd(f(x)+g(x))=dxdf(x)+dxdg(x)ddx(3f(x))=3ddxf(x)\frac d{dx}(3f(x))=3\frac d{dx}f(x)dxd(3f(x))=3dxdf(x)
之后求导其实可以用一个矩阵来描述ddx(b0)=0=e⃗1=(0000....0);\frac d{dx}(b_0)=0=\vec e_1=\begin{pmatrix}0\\0\\0\\0\\....\\0\end{pmatrix};dxd(b0)=0=e 1= 0000....0 ;ddx(b1)=1=e⃗2=(0100....0);\frac d{dx}(b_1)=1=\vec e_2=\begin{pmatrix}0\\1\\0\\0\\....\\0\end{pmatrix};dxd(b1)=1=e 2= 0100....0 ;
ddx(b2)=2=e⃗3=(0020....0);\frac d{dx}(b_2)=2=\vec e_3=\begin{pmatrix}0\\0\\2\\0\\....\\0\end{pmatrix};dxd(b2)=2=e 3= 0020....0 ;
ddx(bn)=n=e⃗n+1=(0000....n);\frac d{dx}(b_n)=n=\vec e_{n+1}=\begin{pmatrix}0\\0\\0\\0\\....\\n\end{pmatrix};dxd(bn)=n=e n+1= 0000....n ;
所以最终求导就可以用
ddxf(x)e⃗n+1=(00....0010...0002...00....0....n)(c1c2..........cn);\frac d{dx}f(x)\vec e_{n+1}=\begin{pmatrix}0&0&....&0\\0&1&0&...&0\\0&0&2&...&0\\0&....&0&....&n\end{pmatrix}\begin{pmatrix}c_1\\c_2\\...\\...\\....\\c_n\end{pmatrix};dxdf(x)e n+1= 0000010........0200..........00n c1c2..........cn ;
这样,两个看似没什么关联的数学知识就串联起来了