IsaacSim 版本:5.0
目录
问题2:导入后的爪子在晃以及和ur5e机器人结合时夹爪出现晃动
问题1:导入后的夹爪部分连杆不随着一起动
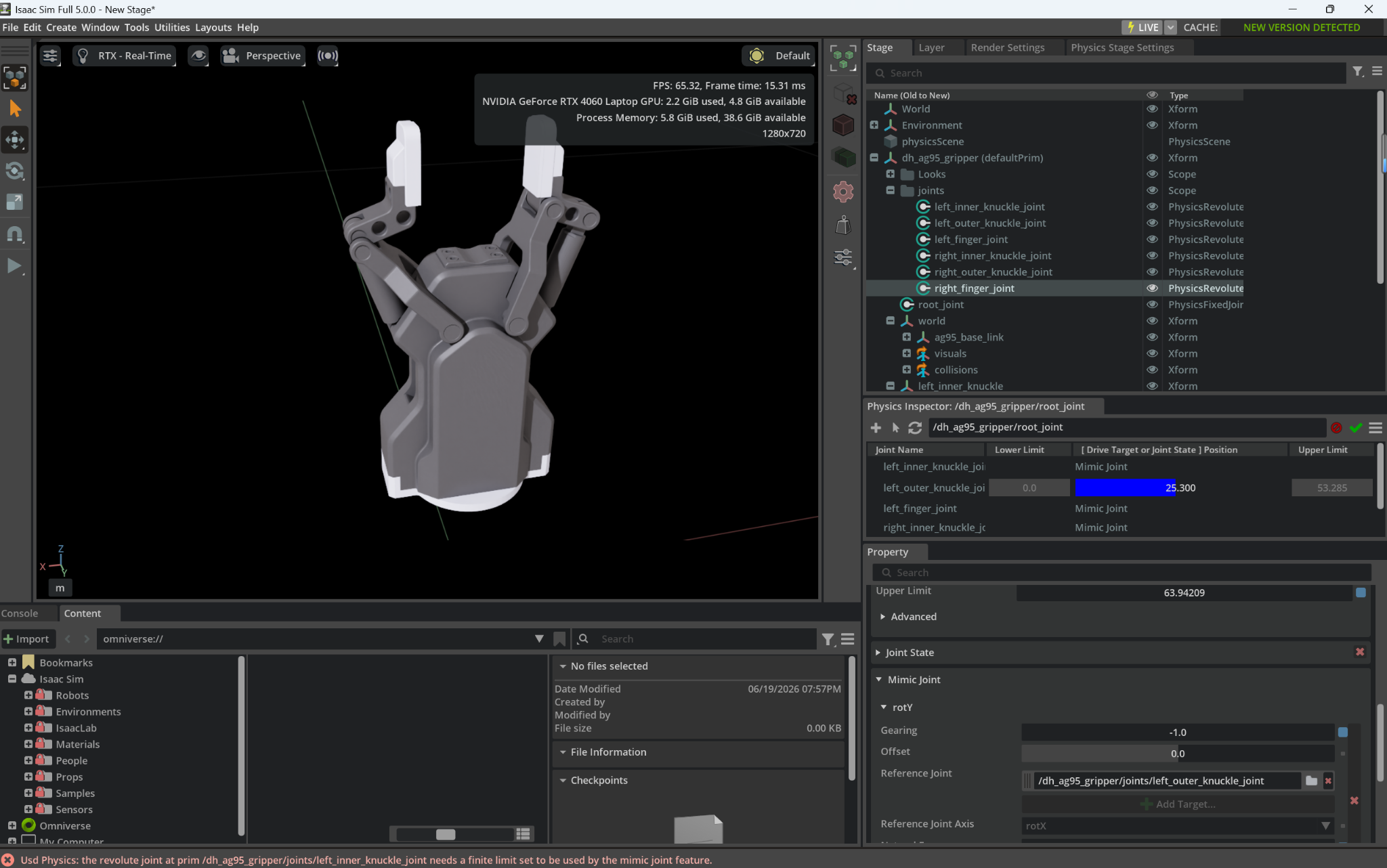
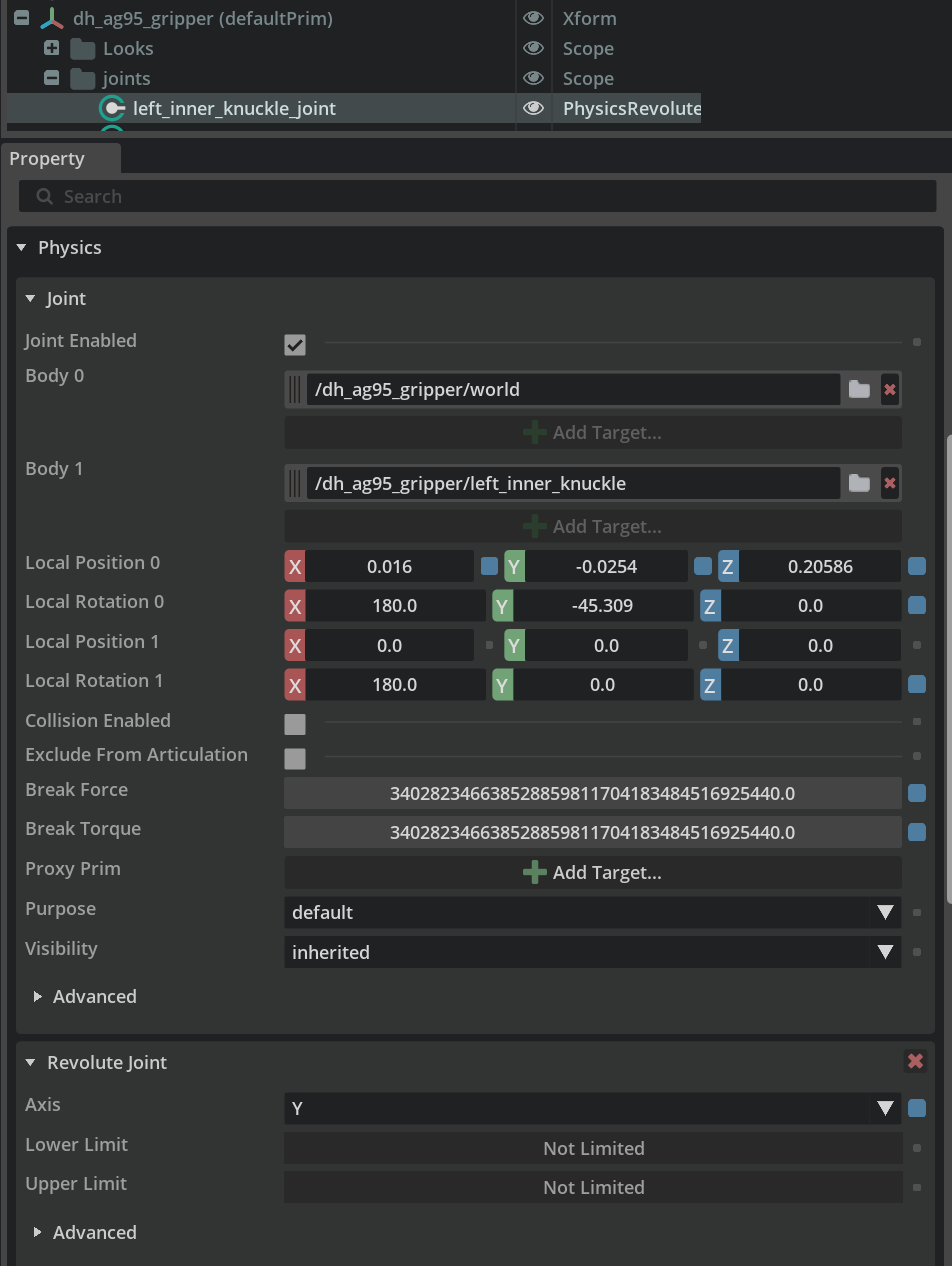
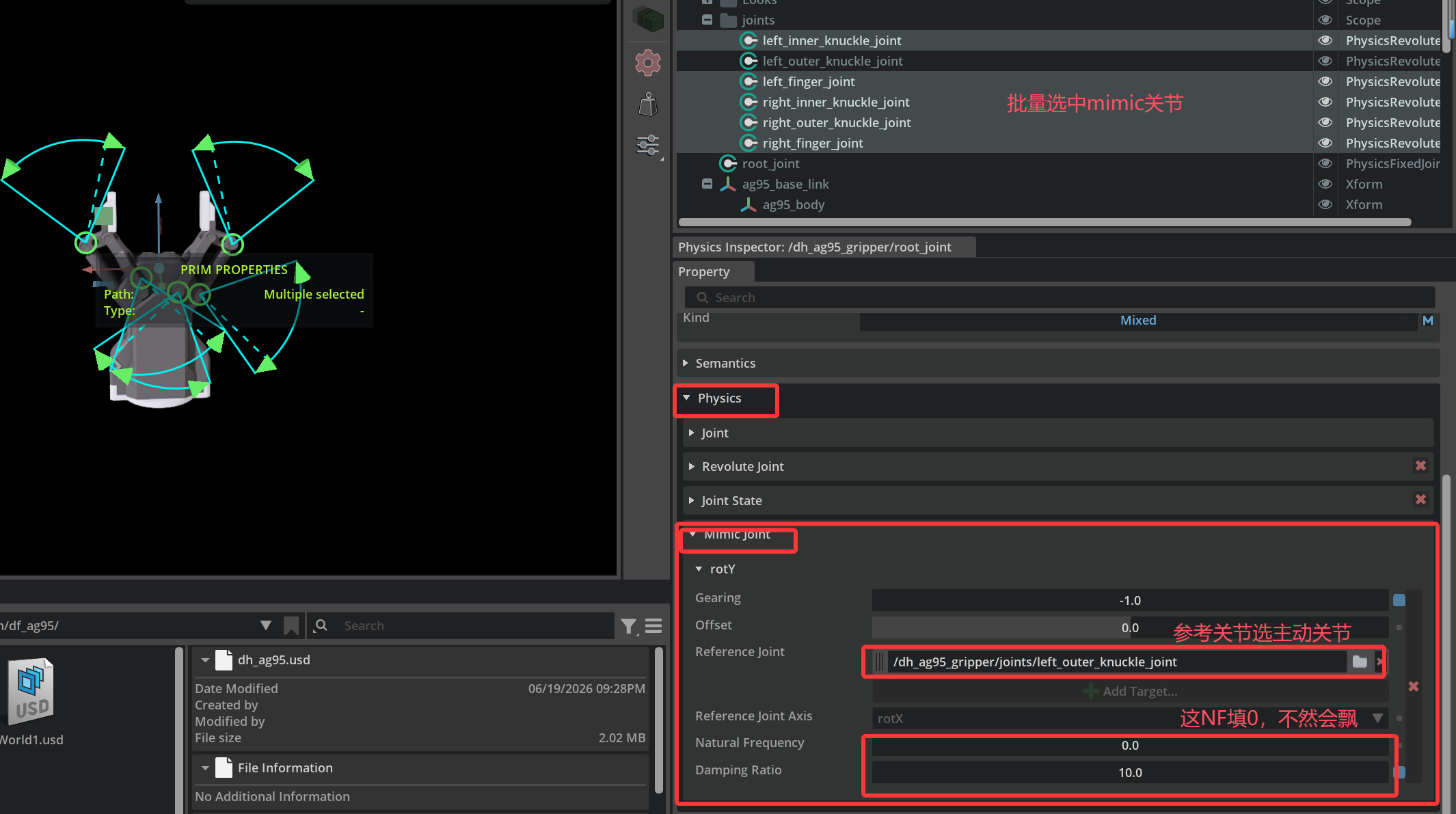
**原因:**导入后,该关节的上下限位丢失,需要自己补充。另外,还有个mimic关节 丢失了参考关节,需要设置为唯一的主动关节
问题2:导入后的爪子在晃以及和ur5e机器人结合时夹爪出现晃动
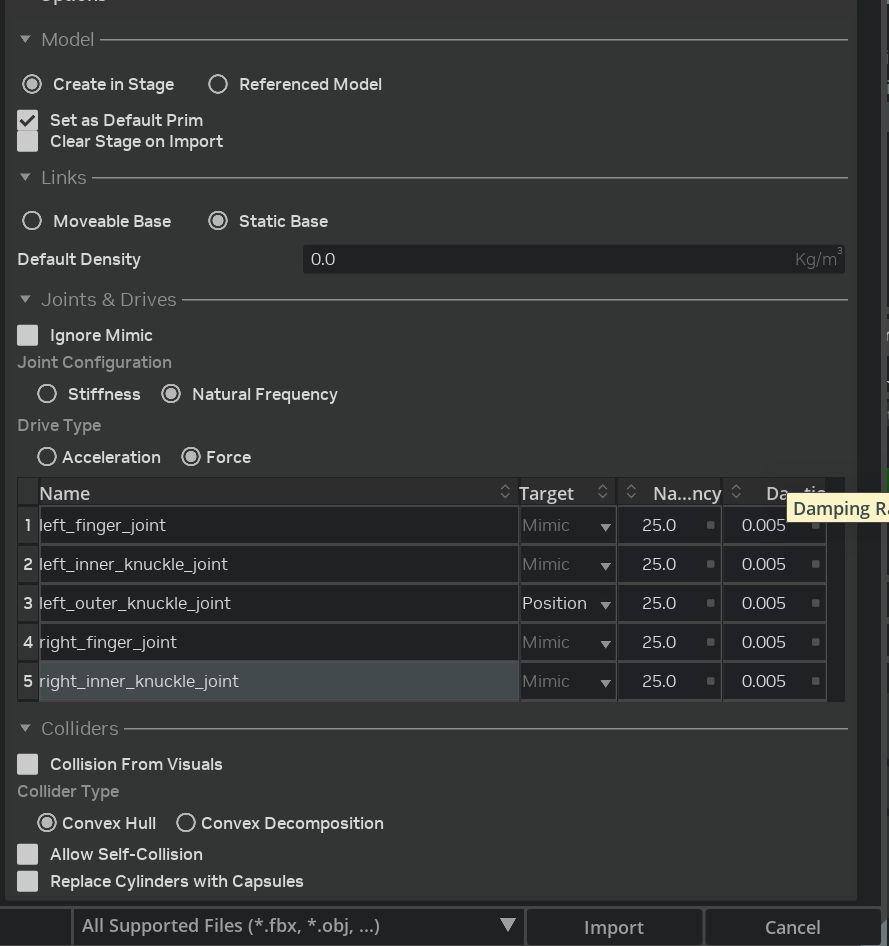
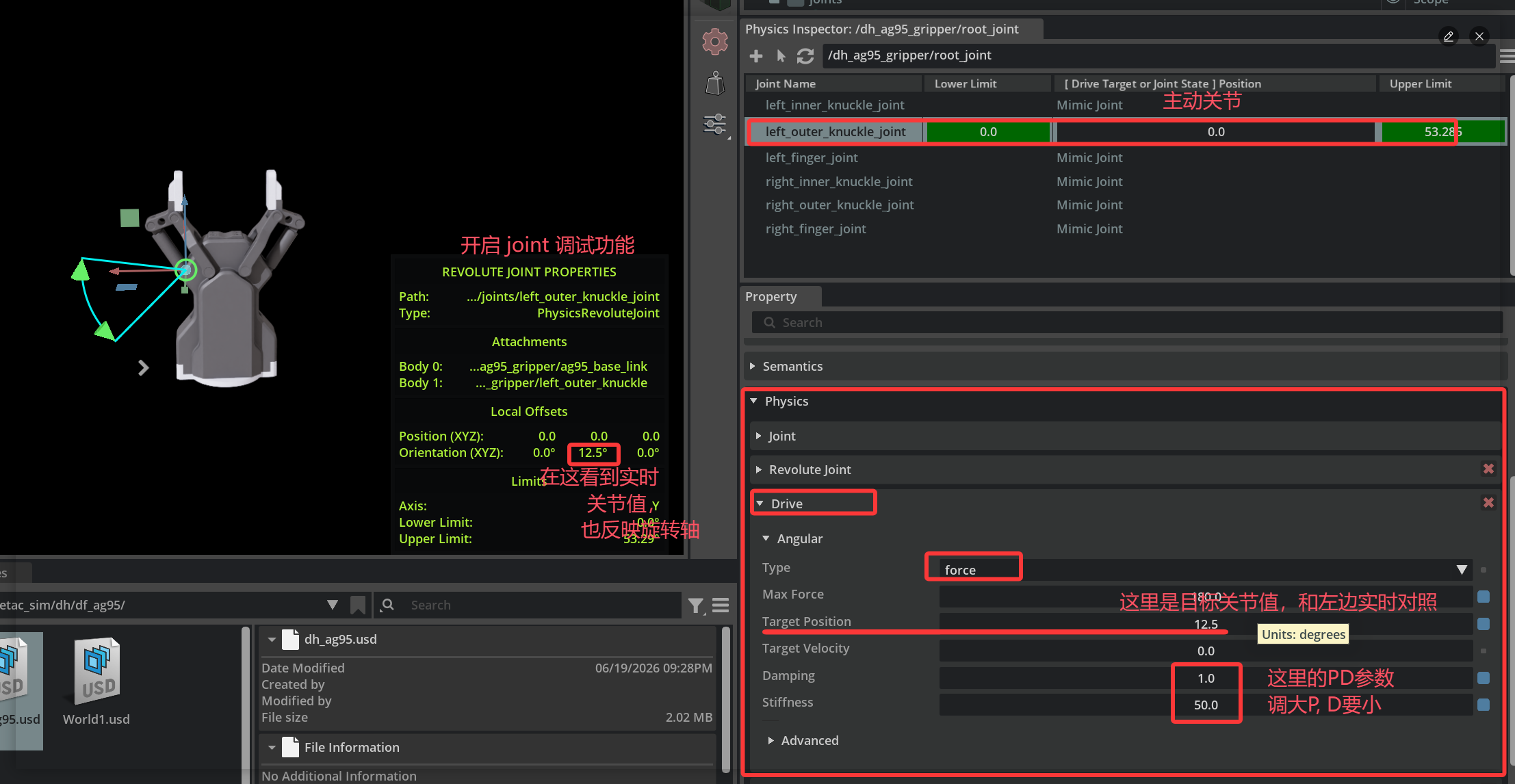
原因: Natural Frequency 与 Damping Ratio 或 Damping 与 Stiffness 参数不合理
按PD控制理解,调大P,能够提供响应速度,调大D,能够更加平滑
**解决:**对于夹爪,它有两类关节:主动关节和被动关节(mimic joint), 经过试验这里需要分别进行设置