目录
1.摘要
针对多无人机与多卡车车队协同调度问题,本文通过建立混合整数规划模型,统筹优化卡车路径与无人机起降时机,最小化包含行驶、固定及迟到惩罚总运营成本。为此,本文设计基于列生成启发式加速算法,并通过数值实验与敏感性分析验证了其高效性,提出了相应管理启示。
2.问题描述
模型考虑了客户、仓库及路网节点,允许卡车在行驶中收发多架无人机。模型以总运营成本最小化:
M i n i m i z e { ∑ k ∈ K s G ε k + ∑ k ∈ K ∑ i ∈ O ∑ j ∈ O + s K t i j K α i j k + ∑ k ∈ K ∑ d ∈ D i ∈ O − ∑ c ∈ C s D t i D β i c a k + ∑ k ∈ K d ∈ D j ∈ O + ∑ c ∈ C s D t j i D β c j i k + ∑ k ∈ K c ∈ C s T ( δ c k − e c ∑ d ∈ D i ∈ O − β i c a k ) + } \mathrm{Minimize}\left\{\sum_{k\in K}s^{G}\varepsilon_{k}+\sum_{k\in K}\sum_{i\in O}\sum_{j\in O_{+}}s^{K}t_{ij}^{K}\alpha_{ijk}+\sum_{k\in K}\sum_{d\in Di\in O_{-}}\sum_{c\in C}s^{D}t_{i}^{D}\beta_{icak}+\sum_{k\in Kd\in Dj\in O_{+}}\sum_{c\in C}s^{D}t_{ji}^{D}\beta_{cjik}+\sum_{k\in Kc\in C}s^{T}\left(\delta_{ck}-e_{c}\sum_{d\in Di\in O_{-}}\beta_{icak}\right)^{+}\right\} Minimize⎩ ⎨ ⎧k∈K∑sGεk+k∈K∑i∈O∑j∈O+∑sKtijKαijk+k∈K∑d∈Di∈O−∑c∈C∑sDtiDβicak+k∈Kd∈Dj∈O+∑c∈C∑sDtjiDβcjik+k∈Kc∈C∑sT δck−ecd∈Di∈O−∑βicak +⎭ ⎬ ⎫
约束条件包括卡车与无人机流守恒、客户唯一服务性、时序衔接、卡车容量限制以及子回路消除。针对原目标函数中客户迟到惩罚的非线性项,引入辅助变量 τ c k 1 + \tau^{1+}{ck} τck1+ 和 τ c k 1 − \tau^{1-}{ck} τck1− 增设线性约束:
δ c k − e c ∑ d ∈ D ∑ i ∈ O − β i c d k = τ c k 1 + − τ c k 1 − ∀ c ∈ C , k ∈ K \delta_{ck}-e_c\sum_{d\in D}\sum_{i\in O^-}\beta_{icdk}=\tau_{ck}^{1+}-\tau_{ck}^{1-}\quad\forall c\in C,k\in K δck−ecd∈D∑i∈O−∑βicdk=τck1+−τck1−∀c∈C,k∈K
3.基于列生成的启发式算法
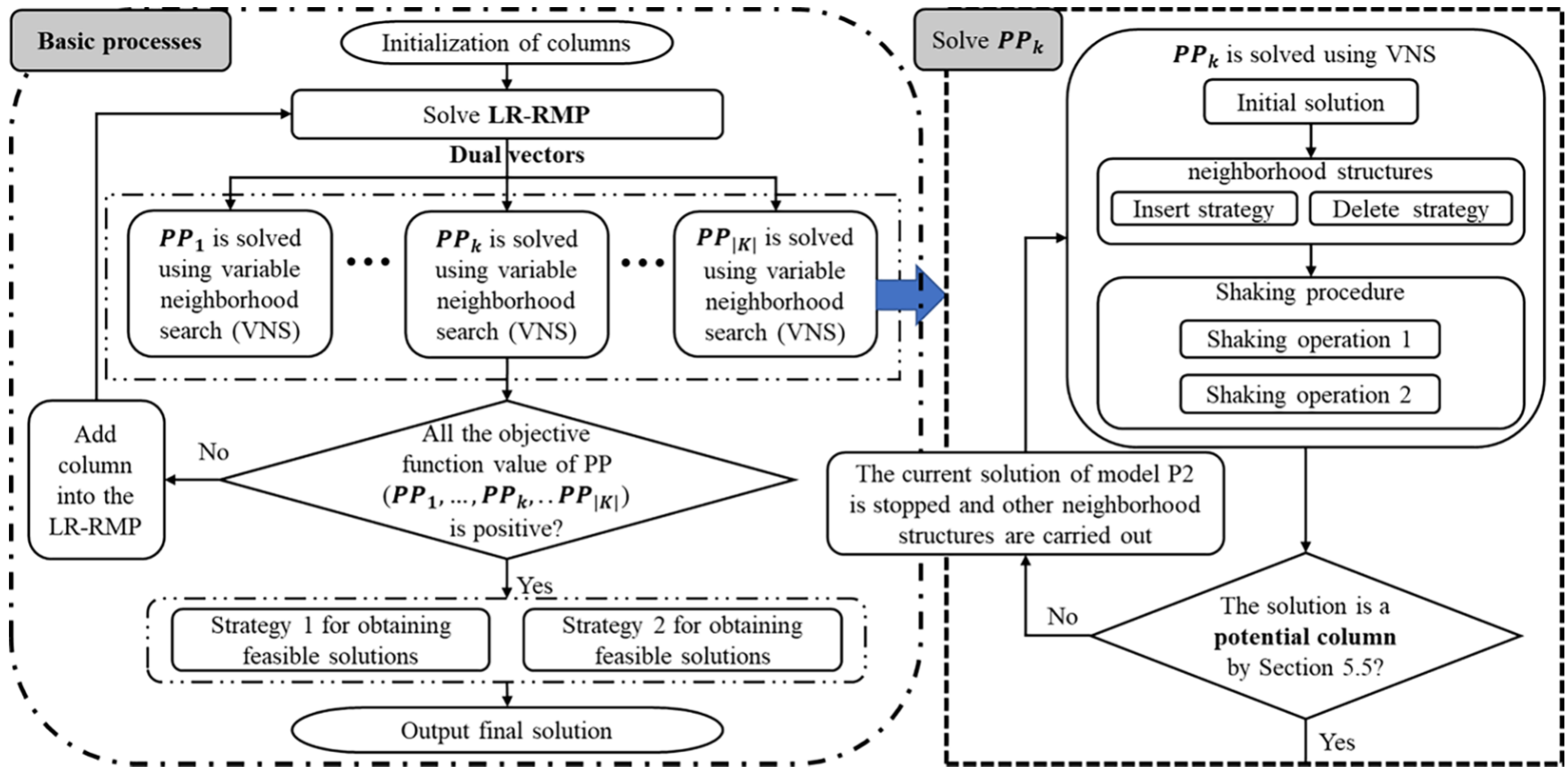
基于集合划分模型
列生成算法中原问题被转化为基于集合划分松弛主问题(LR-RMP)。设路径 r r r 的成本为 c r c_r cr,在由启发式算法生成的初始路径子集 R ′ R' R′ 上,通过松弛选择变量 ξ r \xi_r ξr 优化总成本:
min ∑ r ∈ R ′ c r ξ r \min\sum_{r\in R^{\prime}}c_r\xi_r minr∈R′∑crξr
子问题模型
子问题(PP)可分解为 ∣ K ∣ |K| ∣K∣ 个独立子问题 P P k PP_k PPk,对应各卡车车队。最小化检验成本:
min σ k = c r − ∑ j ∈ C ∑ i ∈ O − ∪ C ∑ d ∈ D β i j d θ j − π \min\sigma_k=c_r-\sum_{j\in C}\sum_{i\in O^-\cup C}\sum_{d\in D}\beta_{ijd}\theta_j-\pi minσk=cr−j∈C∑i∈O−∪C∑d∈D∑βijdθj−π
初始解生成采用贪心启发式算法,按需求量升序排列客户并分配给卡车,再依时间窗口均分给无人机。卡车贪心访问离客户最近的路网节点以确定主干路径,无人机在其间起降。固定路径变量后,用 CPLEX 求解时序模型。
子问题利用变邻域搜索算法(VNS)配合数学规划模型交替求解:
模型 P 1 P1 P1(卡车路径): 约束卡车必须访问节点集 R R RR RR,最小化卡车行驶成本
min ∑ i ∈ O − ∑ j ∈ O + s K t i j K α i j 1 \min \sum_{i\in O^-}\sum_{j\in O^+} s_K t^K_{ij} \alpha^1_{ij} \quad mini∈O−∑j∈O+∑sKtijKαij1
模型 P 2 P2 P2(无人机路径): 在 P 1 P1 P1 已知卡车路径 a i j a_{ij} aij 下,规划客户集 R D RD RD,最小化检验成本。 min ∑ i ∈ O − ∑ j ∈ O + s K t i j K a i j + ∑ d ∈ D ∑ i ∈ O − ∑ c ∈ C s D t i c D β i c d 2 + ∑ d ∈ D ∑ j ∈ O + ∑ c ∈ C s D t j c D β c j d 2 + ∑ c ∈ C s T ( δ c 2 − e c ∑ d ∈ D ∑ i ∈ O − β i c d 2 ) + + s G − ∑ j ∈ C ∑ i ∈ O − ∪ C ∑ d ∈ D β i j d 2 θ j − π \min \sum_{i\in O^-}\sum_{j\in O^+} s_K t^K_{ij} a_{ij} + \sum_{d\in D}\sum_{i\in O^-}\sum_{c\in C} s_D t^D_{ic}\beta^2_{icd} + \sum_{d\in D}\sum_{j\in O^+}\sum_{c\in C} s_D t^D_{jc}\beta^2_{cjd} + \sum_{c\in C} s_T \left(\delta^2_c - e_c\sum_{d\in D}\sum_{i\in O^-}\beta^2_{icd}\right)^+ + s_G - \sum_{j\in C}\sum_{i\in O^-\cup C}\sum_{d\in D} \beta^2_{ijd}\theta_j - \pi mini∈O−∑j∈O+∑sKtijKaij+d∈D∑i∈O−∑c∈C∑sDticDβicd2+d∈D∑j∈O+∑c∈C∑sDtjcDβcjd2+c∈C∑sT(δc2−ecd∈D∑i∈O−∑βicd2)++sG−j∈C∑i∈O−∪C∑d∈D∑βijd2θj−π
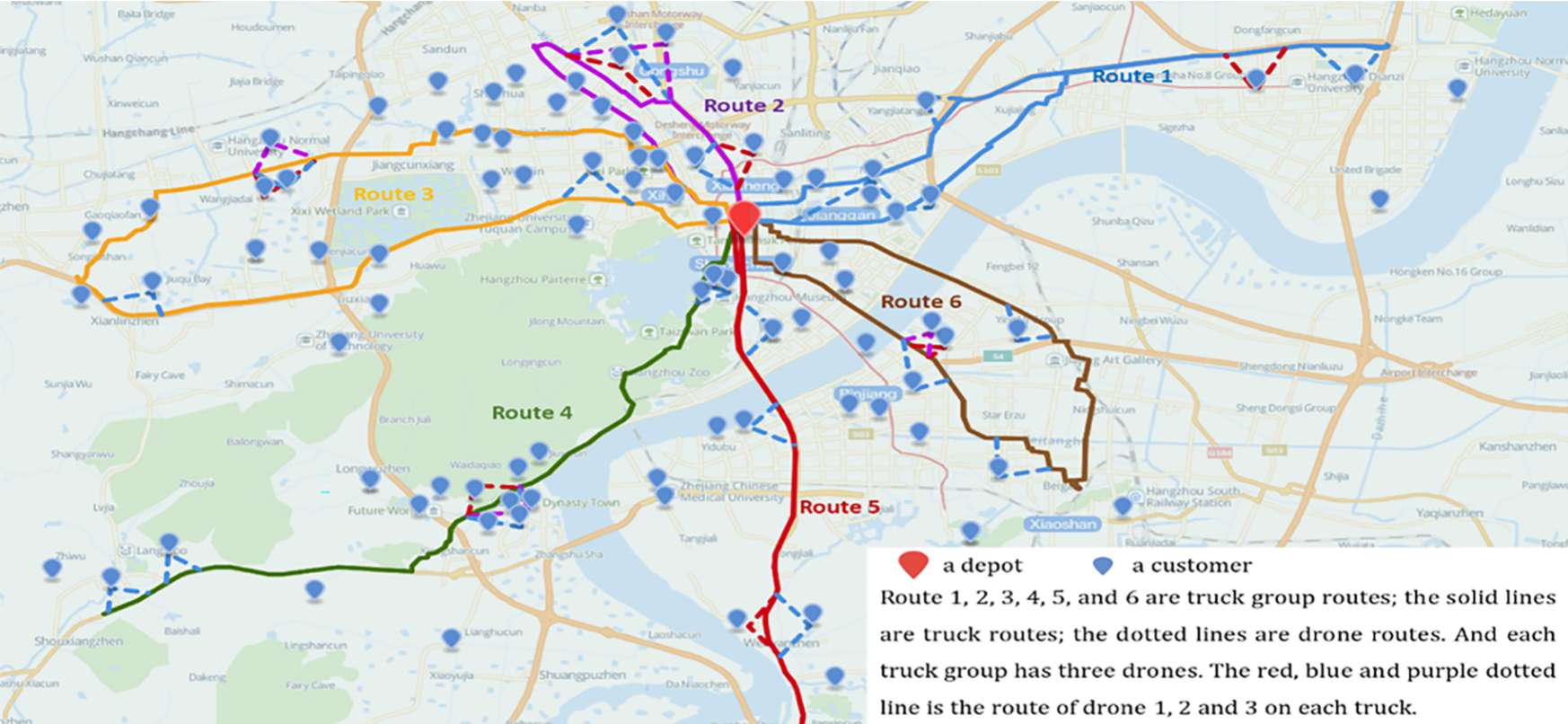
4.结果展示
实验以杭州城市圈为背景,子问题求解 加速VNS在大规模实例中较基础VNS效率提升5.69%,且远优于无法在3600秒内求解的CPLEX。可行解策略协同规划卡车与无人机路径的策略,在大规模实例中使目标值平均降低0.12%。
算法性能,列生成启发式算法可在15分钟内求解30个订单的规模,支持滚动时域运行,实际每小时可处理120个订单。
敏感性分析
无人机数量增加单车搭载的无人机数量可降低成本,但边际效益递减。
路网节点数增加节点能略微优化路径,但会显著提高计算复杂度。
无人机速度提升速度在一定范围内可降低成本,但超过阈值后受单位时间成本增加与时间窗口限制,总成本反而上升。
最大飞行时间引入航程限制会小幅增加总成本,因无人机无法无限度等待卡车,必须调整路径以满足时限。
5.参考文献
Gao J, Zhen L, Laporte G, et al. Scheduling trucks and drones for cooperative deliveriesJ. Transportation Research Part E: Logistics and Transportation Review, 2023, 178: 103267.
6.算法辅导·应用定制·读者交流
xx