线阵相机 vs 面阵相机:区别与适用场景(选型不再纠结)
- [🎯线阵相机 vs 面阵相机:区别与适用场景(选型不再纠结)](#🎯线阵相机 vs 面阵相机:区别与适用场景(选型不再纠结))
-
- 🎯一、最核心的成像原理区别
-
- [面阵相机(Area Scan)](#面阵相机(Area Scan))
- [线阵相机(Line Scan)](#线阵相机(Line Scan))
- [🎯二、线阵相机 \& 面阵相机 核心对比](#🎯二、线阵相机 & 面阵相机 核心对比)
- [🎯三、面阵相机 适用场景(90%常规项目)](#🎯三、面阵相机 适用场景(90%常规项目))
- [🎯四、线阵相机 适用场景(高速/大幅面专属)](#🎯四、线阵相机 适用场景(高速/大幅面专属))
- 🎯五、选型极简口诀(直接套用)
- 🎯六、常见选型误区
- 🎯写在最后
🎯线阵相机 vs 面阵相机:区别与适用场景(选型不再纠结)
做工业视觉项目,最经典的选型问题:到底用线阵相机还是面阵相机?
很多新手默认全部用面阵相机,导致高速、大幅面、连续物料项目精度不足、漏检严重;也有人盲目上线阵,导致设备结构复杂、成本浪费。
其实两者没有好坏,只有场景适配与否。本文用最落地的视角,讲透线阵、面阵的核心区别、优缺点、以及对应的标准检测场景,看完彻底告别选型纠结。
🎯一、最核心的成像原理区别
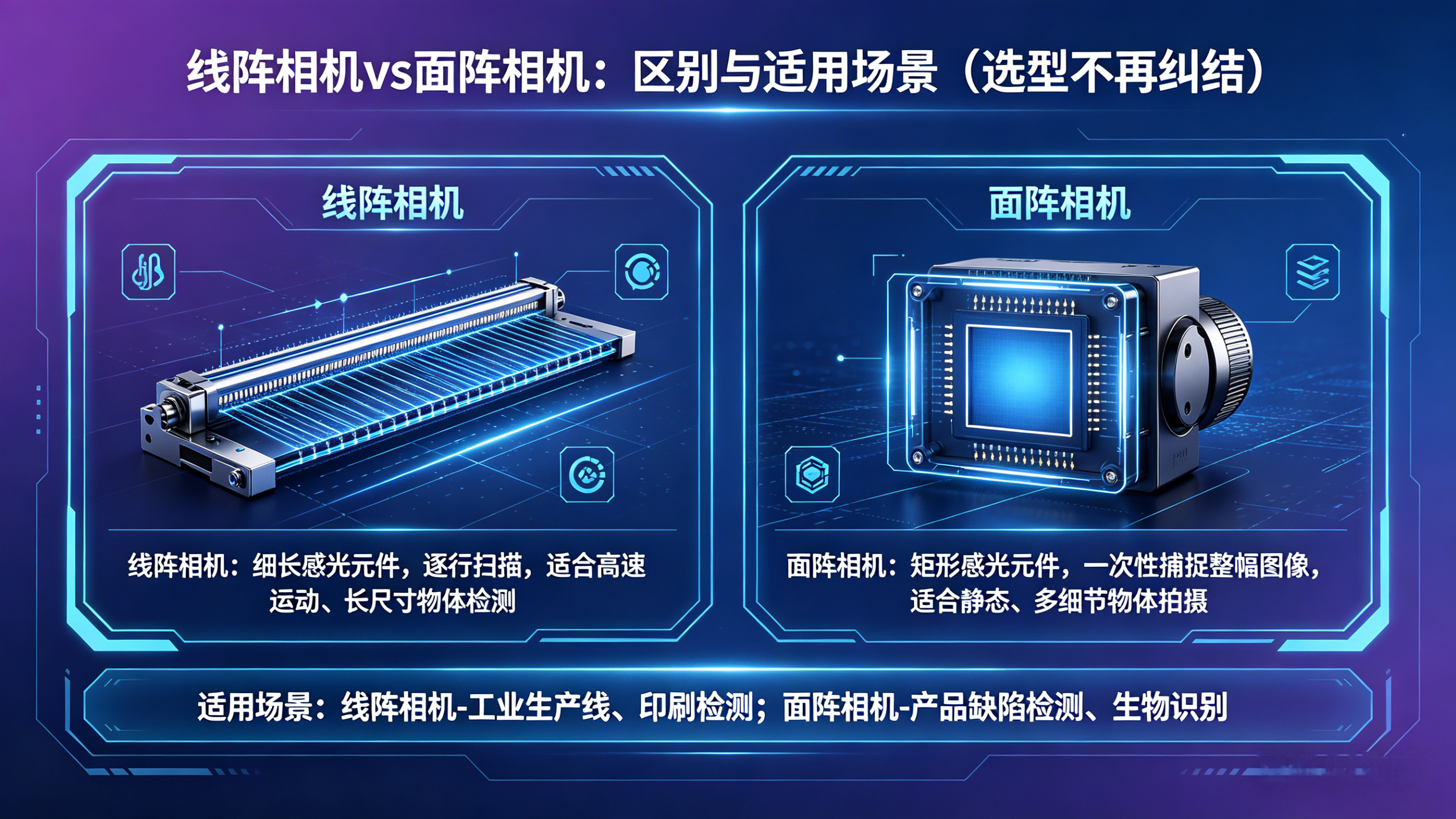
面阵相机(Area Scan)
成像方式:一次性拍摄一整幅二维图像(宽×高)。
特点:单帧即可成像,不需要依赖运动配合,拍照即出图。
我们日常见到的500万/1200万/2000万工业相机,基本都是面阵相机。
线阵相机(Line Scan)
成像方式 :每次只采集一行像素(单行数据),通过产线/平台连续运动,逐行拼接成完整大图。
特点 :必须配合连续运动,运动不停、采集不停,最终合成一张超高分辨率长条图像。
🎯二、线阵相机 & 面阵相机 核心对比
| 对比维度 | 面阵相机 | 线阵相机 |
|---|---|---|
| 成像方式 | 整帧一次性成像 | 单行逐行扫描、运动拼接成像 |
| 分辨率特点 | 固定视野,分辨率有限 | 可无限延伸视野,纵向分辨率极高 |
| 运动依赖 | 无需运动,可静态拍照 | 必须连续匀速运动 |
| 检测速度 | 中低速场景友好 | 适配超高速连续产线 |
| 成像精度 | 常规精度够用,大幅面精度受限 | 大幅面、长距离检测精度极高 |
| 设备成本 | 低、调试简单、结构简单 | 高,需专用光源、镜头、同步控制 |
| 调试难度 | 低,即拍即所见 | 高,需速度同步、拼接校正 |
🎯三、面阵相机 适用场景(90%常规项目)
核心定位:静态、小视野、独立工件、离散检测
只要是单个工件、固定视野、可停稳拍照、工位式检测,优先面阵。
典型应用:
-
3C零件外观缺陷(崩边、划伤、脏污、压伤)
-
产品有无检测、装配错位、正反检测
-
常规尺寸测量、孔径、间距、位置度
-
二维码、条码、字符识别(OCR)
-
机械手定位、对位、拾取
-
低速流水线、间歇式拍照工位
优势总结:部署快、成本低、调试简单、系统稳定,满足绝大多数离散工件检测需求。
🎯四、线阵相机 适用场景(高速/大幅面专属)
核心定位:连续运动、超长幅面、高速卷材、全覆盖检测
面阵相机最大短板:视野固定,大图分辨率不足、存在死角。
针对无限长、连续运动的物料,只能用线阵逐行扫描全覆盖。
典型应用:
-
薄膜、PET、保护膜、覆膜表面瑕疵检测
-
各类板材:PCB、玻璃、钢板、铝板、木板划痕检测
-
布匹、无纺布、纸张、烟包连续检测
-
锂电隔膜、铜箔、铝箔极片缺陷检测
-
大幅面瓷砖、光伏玻璃、面板全覆盖检测
-
高速流水线连续飞拍、无死角全检场景
优势总结:无视野盲区、分辨率均匀、适合无限长物料,是大面积、高一致性全检的唯一方案。
🎯五、选型极简口诀(直接套用)
离散工件、固定工位、可停拍、小视野 → 用面阵
连续卷材、板材超长、高速运动、全覆盖全检 → 用线阵
🎯六、常见选型误区
误区1:分辨率越高越好
大幅面连续检测,用高像素面阵依然会有视野边界、拼接盲区,无法替代线阵。
误区2:线阵=精度更高
静态小零件检测,面阵精度、稳定性、性价比全面优于线阵。
误区3:线阵可以随便替代面阵
线阵需要严格速度同步、专用光源、运动机构,小项目使用只会徒增成本与调试难度。
🎯写在最后
面阵相机赢在通用、稳定、简单、低成本,适配工业绝大多数离散工位;
线阵相机赢在超长视野、高速连续、无死角全覆盖,专攻大面积连续材料检测。
优秀的视觉选型,从来不是选最贵、参数最高的设备,而是场景匹配度最高的方案。
#工业视觉 #机器视觉 #线阵相机 #面阵相机 #相机选型 #视觉检测实战
(注:文档部分内容可能由 AI 生成)