支东祥 AUTOSAR组织

以下内容由AUTOSAR官方培训直播课程整理而成,了解更多:
AUTOSAR CP全新系统化培训上线!从底层到应用,三步阶梯,五大学习维度构建完整知识体系_auto sar培训-CSDN博客
在汽车电子电气架构从集中式向分布式快速演进的今天,多ECU、多传感器协同工作已成常态。无论是智能驾驶的环境感知数据融合,还是车身控制系统的指令协同,都离不开一个核心前提------数据时间同步。AUTOSAR标准中的Synchronized Time Base Manager(StbM,同步时基管理模块),正是解决这一关键问题的核心组件,为车载网络构建精准、可靠的全局时间体系。
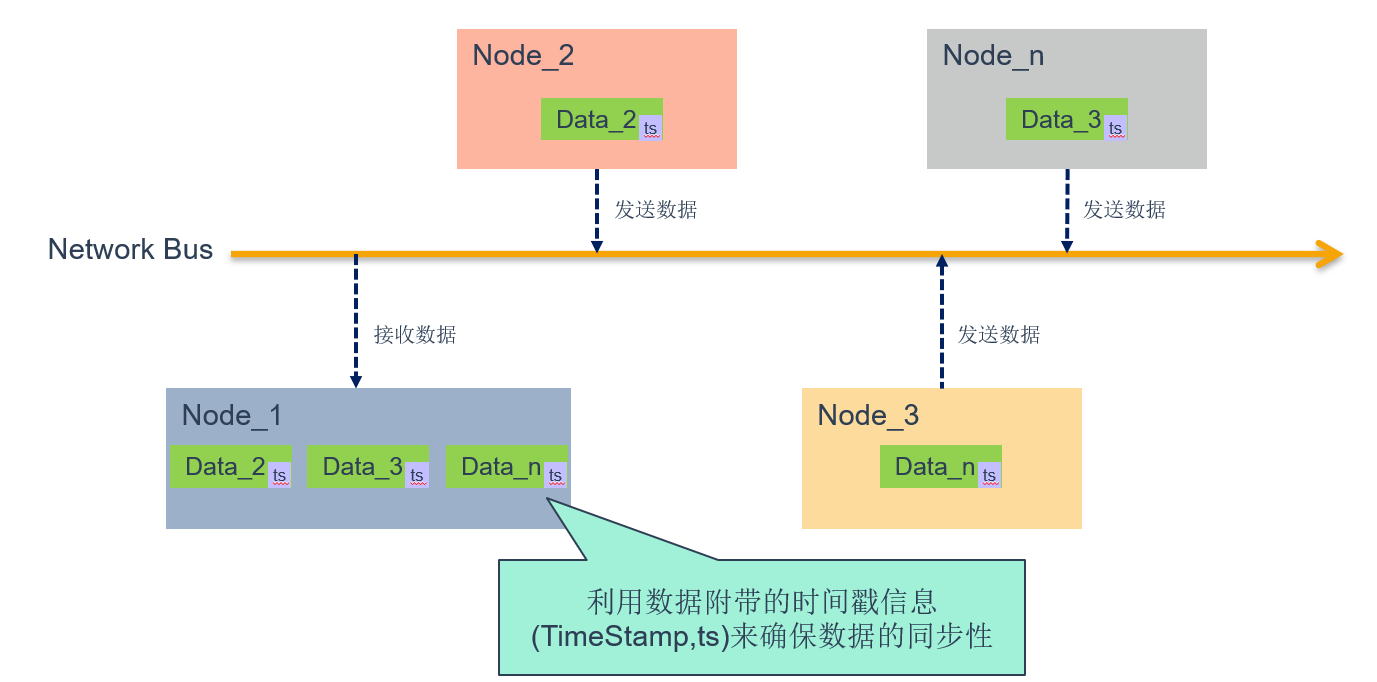
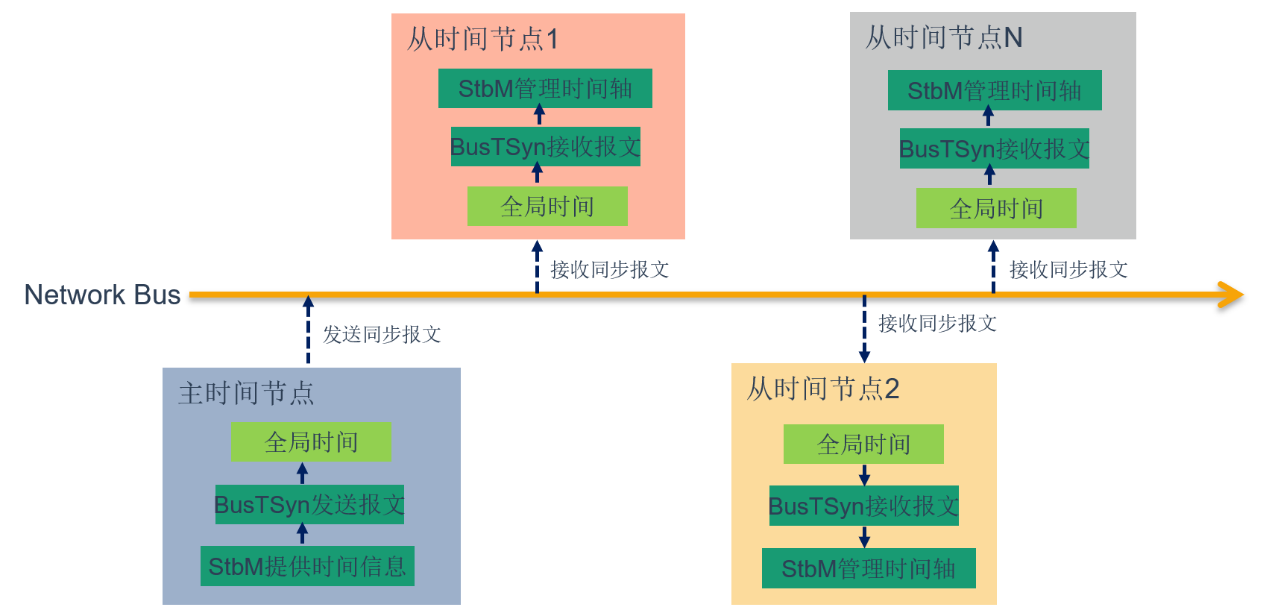
分布式架构下,车辆的传感器、控制器分布在不同节点,数据采集、传输、处理分散进行。若各节点时间各自独立,同一时刻采集的传感器数据会因时间戳偏差出现时序混乱,导致数据融合失效、控制逻辑出错,甚至影响行车安全。因此,全局时间同步是分布式车载系统稳定运行的基础。AUTOSAR 构建了 "主从节点 + 全局时间" 的同步架构:由一个主时间节点提供全局时间,其余从节点通过网络接收同步报文,校准自身时间,确保全网时间统一。而 StbM 与 BusTSyn(总线时间同步模块)协同分工,BusTSyn 负责同步报文的收发,StbM 则承担时间轴管理、时间计算与校正等核心工作,是整个时间同步体
系的 "大脑"。
StbM 的核心管理对象是时基(Time Base),即各类时钟源,可同时管理多个时基适配不同场景。按功能划分,时基分为三类:同步时基(ID 0-15),与全局时间同步后提供标准全局时间;偏移时基(ID 16-31),依附同步时基,提供全局时间及相对偏移量;纯本地时基(ID 32-127),默认基于本地时钟计时,同步后可输出全局时间。从网络角色看,时基又分为主时基、从时基和网关时基:主时基位于主节点,负责生成并分发全局时间;从时基在从节点,接收报文校准自身;网关时基则跨多个时间网络,承担时间转发同步功能,适配复杂多总线车载网络拓扑。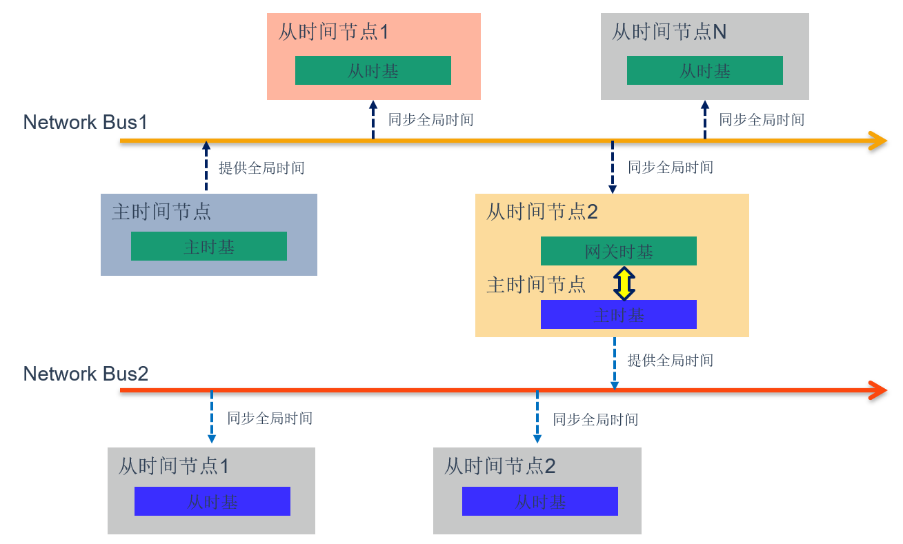
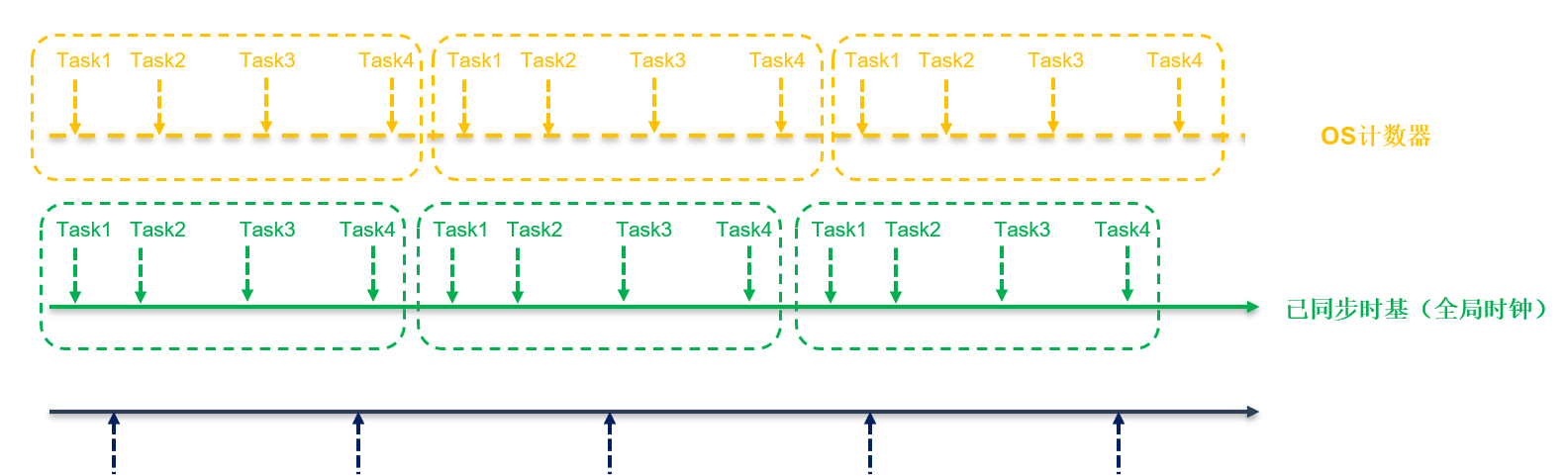
时间同步的关键是精准计算全局时间。StbM 依赖本地时钟源(支持 OsCounter、Gpt、EthIf 三种)获取本地时间,结合 BusTSyn 接收的全局时间报文,通过公式计算当前精准全局时间。由于本地时钟存在固有偏差,StbM 引入偏差率校正机制,偏差率由全局时间流逝量与本地时间流逝量的比值确定,代入公式优化计算结果,大幅提升时间精度。同时,StbM 支持定时校正测量,从节点通过周期性比对全局时间与本地时间,动态更新偏差率,抵消时钟漂移带来的误差,确保长期同步稳定性。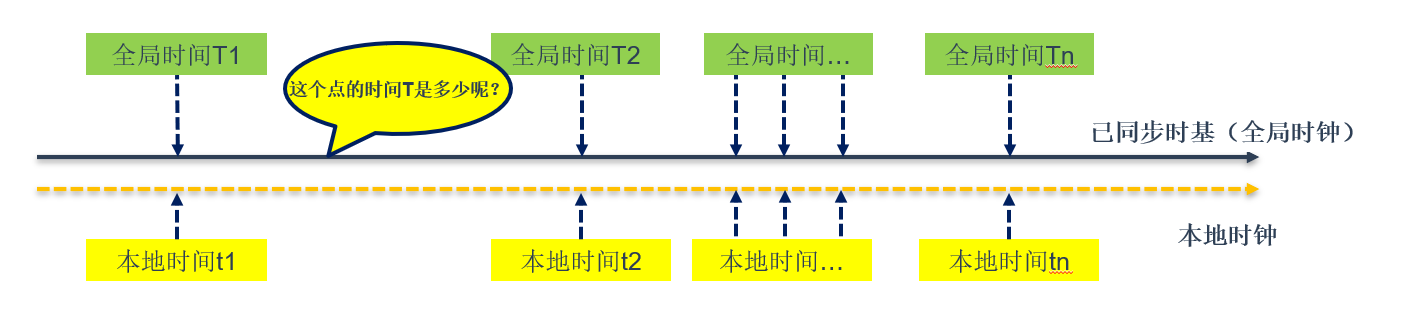
除基础时间同步外,StbM 还具备多项实用功能,适配车载场景多样化需求。定时通知功能可基于全局时间设定定时事件,配合 Gpt 定时器实现精准触发;OS 调度表同步功能能将操作系统任务调度与全局时间绑定,保证多 ECU 任务调度时序一致;全局时间记录功能可存储时间戳数据,用于精度校验与问题溯源,为系统调试优化提供依据。
在实际项目中,StbM 配置灵活,可适配 CAN、以太网、FlexRay 等多种总线。例如某控制器接入以太网和 CAN 双时间网络,以太网侧作为从节点接收全局时间,CAN 侧作为主节点分发时间,StbM 可分别配置 ETH 同步时基(本地时钟源为 EthIf,开启时间校正)和 CAN 同步时基(本地时钟源为 OsCounter),同时关联 OS 调度同步,满足复杂网络下的时间管理需求。配置过程涵盖通用参数、时基属性、本地时钟、校正策略等模块,适配不同硬件与业务场景。
从集中式到分布式,车载电子架构的升级,本质上是数据协同能力的升级。StbM 作为 AUTOSAR 时间同步的核心模块,以标准化设计解决了分布式系统的时间一致性难题,为传感器融合、跨 ECU 协同、智能驾驶决策等功能筑牢基础。随着智能网联汽车技术不断迭代,多传感器、多域控融合需求持续升级,StbM 的精准时间管理能力,将成为车载电子系统高可靠、高安全运行的重要支撑,助力汽车电子技术向更智能、更高效的方向持续突破。
