
航点的是怎么影响无人机的姿态的?
打个断点停在上一个航点结束 下一个开始

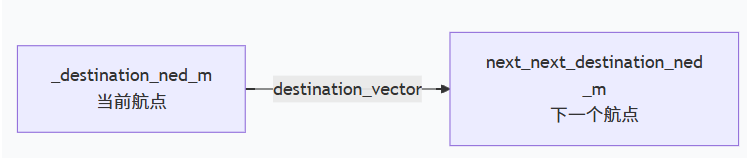
计算以当前点为原点的下一个目标点的向量值
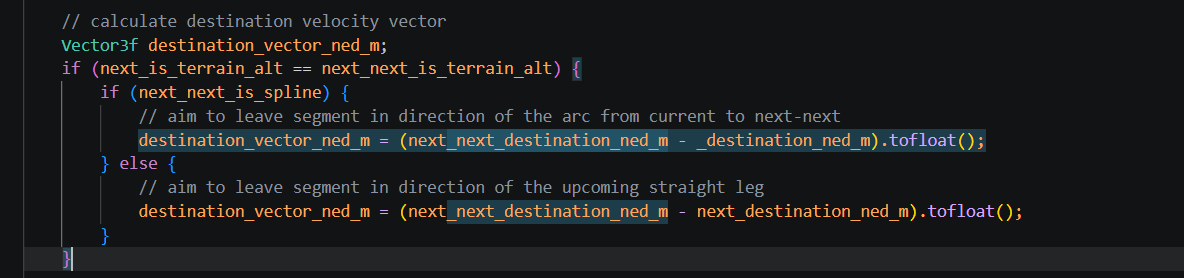
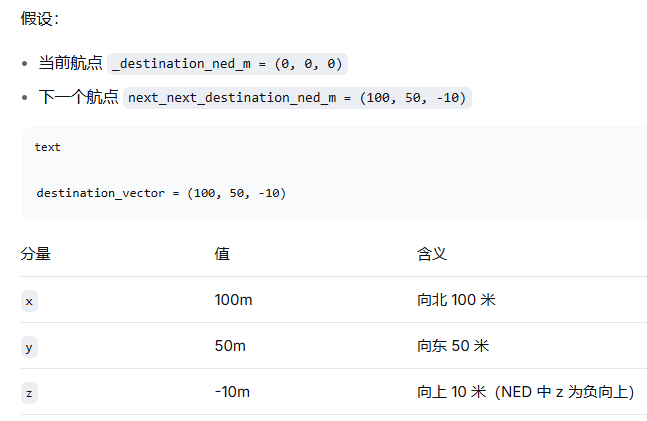
向量的三个分量:
-
x:北向距离(米) -
y:东向距离(米) -
z:垂直距离(米,向下为正)
这个方向向量通常用于航点导航中:
-
计算航向角:
float target_bearing = atan2(destination_vector.y, destination_vector.x);
-
计算距离:
float leg_length = destination_vector.length();
-
计算路径跟踪误差:
// 计算当前位置到目标航线的偏移 Vector3f position_error = current_pos - _destination_ned_m; float crosstrack_error = position_error.x * sin(leg_bearing) - position_error.y * cos(leg_bearing);
-
计算速度前馈:
// 将方向向量归一化后作为期望速度方向 Vector3f target_velocity = destination_vector.normalized() * wp_speed;
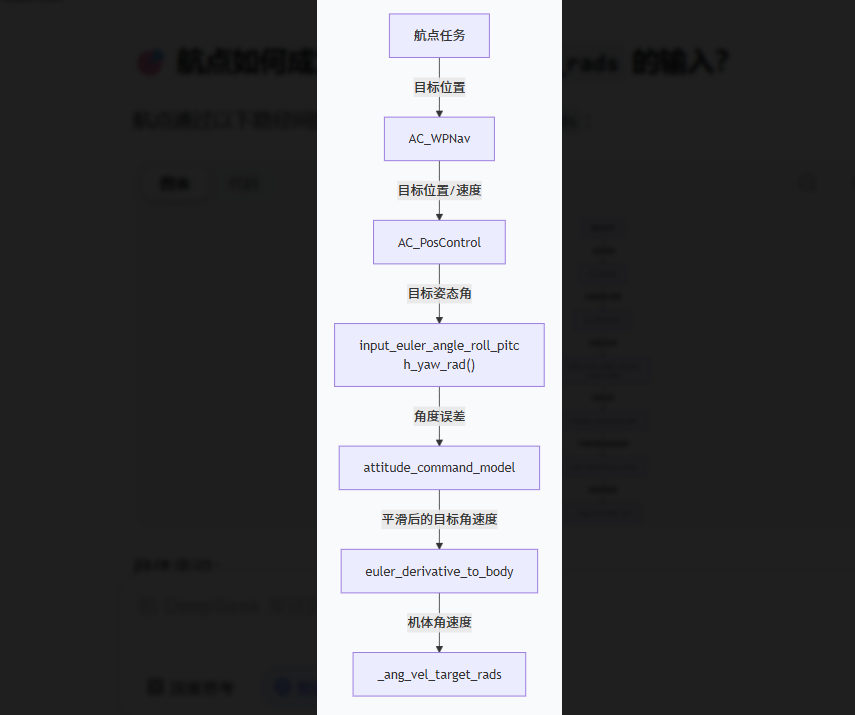
航点影响_ang_vel_target_rads
void ModeAuto::nav_attitude_time_run()
具体来说:
-
航点 → 位置控制器 :
AC_WPNav将航点位置传递给AC_PosControl。 -
位置控制器 → 目标姿态角 :
AC_PosControl::NE_update_controller()计算出_roll_target_rad和_pitch_target_rad。 -
目标姿态角 → 姿态控制器 :
ModeAuto或其他飞行模式调用attitude_control->input_euler_angle_roll_pitch_yaw_rad(),传入目标横滚/俯仰/偏航角。 -
姿态控制器 →
_ang_vel_target_rads:在input_euler_angle_roll_pitch_yaw_rad()中,attitude_command_model()计算角度误差对应的角速度,最终通过euler_derivative_to_body()转换为机体角速度,存入_ang_vel_target_rads。
_euler_angle_target_rad 来自与_ang_vel_target_rads
看下roll
(gdb) p ((AP_MotorsMatrix*)copter.motors)._roll_in
$16 = 0.383552969
roll_thrust = (_roll_in + _roll_in_ff) * compensation_gain;
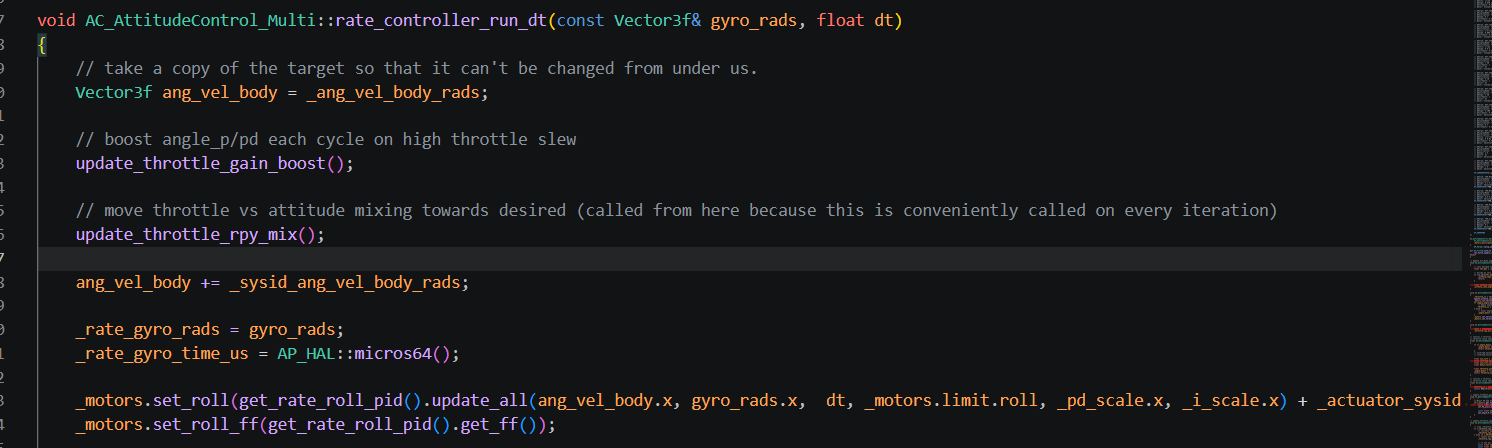
_roll_in =>
_motors.set_roll(get_rate_roll_pid().update_all(ang_vel_body.x, gyro_rads.x, dt, _motors.limit.roll, _pd_scale.x, _i_scale.x) + _actuator_sysid.x);
PID:
get_rate_roll_pid().update_all(ang_vel_body.x, gyro_rads.x, dt, _motors.limit.roll, _pd_scale.x, _i_scale.x)
| 变量 | 含义 |
|---|---|
_target |
滤波后的目标值 |
_error |
滤波后的误差值(target - measurement) |
_derivative |
滤波后的误差导数(D 项) |
_integrator |
积分项累积值(I 项) |
_target_derivative |
目标值导数(用于 D_FF 前馈) |