文章目录
摘要
无线系统中的通感一体化(Integrated Sensing and Communication, ISAC)已经成为一种很有前景的范式,它有潜力提升系统性能、提高资源利用效率,并促成雷达感知与无线通信之间的互利交互,从而塑造未来无线技术的发展方向。本文提出两种新方法,用于解决双基地 ISAC 系统中的联合到达角(Angle of Arrival, AoA)和离开角(Angle of Departure, AoD)估计问题。所提出的方法包括一种利用复值神经网络的深度学习(Deep Learning, DL)方案,以及一种参数化算法。通过利用估计得到的信道矩阵,并引入由粗定时估计组成的预处理步骤,我们能够显著降低输入规模并提高计算效率。研究结果强调了所提出 DL 方法的突出潜力:它能够达到与显式利用多输入多输出(Multiple-Input Multiple-Output, MIMO)模型的参数化方法相近的性能,同时表现出明显更低的计算复杂度。
关键词
通感一体化(Integrated Sensing and Communication, ISAC),双基地雷达,深度学习(Deep Learning, DL),到达角(Angle of Arrival, AoA)估计,离开角(Angle of Departure, AoD)估计。
I. 引言
通感一体化(ISAC)的出现,是面向 6G 网络的一项变革性突破 1。过去,雷达感知和无线通信通常分别独立发展;而联合通信与感知的兴起带来了一种颠覆性范式,为提升频谱效率、降低硬件成本和功耗,以及重新定义网络感知和交互环境的方式创造了前所未有的机会。在这一背景下,ISAC 得到了学术界和工业界的广泛关注。已有研究探索了多种场景和挑战,包括双功能雷达通信(Dual-Functional Radar and Communication, DFRC)2、无人机(Unmanned Aerial Vehicle, UAV)3、波形设计 4、波束成形设计 5、安全 6, 7 以及智能反射面 8, 9。
以通信为中心的 ISAC 利用优化后的通信波形执行感知任务,是一个很有前景的研究方向。它通过复用发射通信信号增强感知能力,有望带来富有价值的结果。复用信道状态信息估计流程,可以为精确确定目标的物理感知参数提供机会,例如到达方向(Direction of Arrival, DoA)、距离和速度。大量研究已经考察并验证了双基地雷达拓扑与基于正交频分复用(Orthogonal Frequency-Division Multiplexing, OFDM)的信号处理相结合,用于通信辅助感知优化 10, 11, 12。特别地,相关工作在实际双基地设置中探索了这种方法 13,展示了其在准确检测和估计目标延迟、多普勒频移等参数方面的有效性。此外,14 进行了功率预算分析,研究通信信噪比和雷达信噪比(Signal-to-Noise Ratio, SNR)随距离变化的行为。
不过,在实际系统中处理接收通信信号以获得高质量感知仍然具有挑战性,因为通信系统和雷达系统并不是共同针对感知功能进行优化的。在设计雷达信号处理功能时,会遇到多种挑战,包括高峰均功率比 15、杂波噪声、多径反射、未优化的旁瓣,以及由循环前缀(Cyclic Prefix, CP)导致的多普勒模糊 16。
本文研究 ISAC 系统中双基地雷达设置下的参数估计问题,重点是同时估计 AoA 和 AoD。由于最大似然估计器是一个高维优化问题,难以在实际硬件资源下实时实现,因此我们建议利用神经网络(Neural Network, NN)作为通用逼近器的能力,通过低复杂度的优化 NN 架构解决这一复杂估计问题。在已有文献 17 中,AoA 和 AoD 估计问题通常被表述为回归问题 18, 19,例如训练多层感知机(Multi-Layer Perceptron, MLP)来最小化估计角度与真实角度之间的均方误差(Mean Squared Error, MSE);或者被表述为基于谱的感知估计问题 20, 21,其中 NN 在独热编码的真值向量上训练,这些向量表示离散角度网格上目标存在的可能性。在后一种情况下,网络不依赖关于目标数量的先验知识,而是输出估计谱,随后需要额外的目标检测步骤从峰值中提取角度估计,这与 MUSIC 等传统方法的常见做法类似。也有其他 DL 方法被提出,例如由多任务自编码器和一系列并行多层分类器组成的多阶段 DL 方法 22。
本文提出一种新的感知估计方法。该方法使用不同于常规输入的信道相关输入,并训练复值 NN,使其在由理想系统模型生成的数据集上最小化 MSE 目标函数。此外,本文还提出一种利用模型知识的参数化算法,用作性能基准。更具体地,参数化二维方法利用阵列导向矢量和 OFDM 子载波规则结构的完整知识,估计目标的 AoA 和 AoD。虽然模型中假设使用 OFDM,但本文方法仍适用于任意预编码 OFDM 调制方式,例如离散傅里叶变换扩展 OFDM(DFT-spread OFDM)。作为比较,文中也给出了克拉美-罗界(Cramer-Rao Bound, CRB)。结果表明,基于 DL 的方案能够提供与参数化方法相近的估计性能,同时需要显著更少的计算量。
本文的主要贡献概括如下。
- 新的联合 AoA/AoD DL 估计器:本文提出一种新的 DL 技术,用于估计 ISAC 系统中的感知参数,即 AoA 和 AoD。该方法不同于常规输入源,而是使用估计信道矩阵;该矩阵包含关于感知参数的关键信息。DL 模型采用复值神经网络,包括复值卷积层和复值线性层,其权重表示为复矩阵,从而增强模型准确表示信道矩阵的能力。激活函数选用复值修正线性单元(Complex Rectified Linear Unit, CReLU)。网络结构由三个隐藏层和一个用于预测感知参数的最终输出层构成。训练阶段使用 MSE 作为目标函数。
- 新的参数化 AoA/AoD 估计器设计:本文开发了一种参数化 AoA/AoD 估计方法,它利用完整模型知识,包括阵列几何结构。该方法利用发射端和接收端的均匀线阵(Uniform Linear Array, ULA)结构,将接收信道矩阵变换为具有给定子阵规模的较小信道矩阵。该方法利用诱导出的 Hankel 结构进一步计算某些特征值,从而辅助 AoD 估计。对于 AoA 估计,则在算法后续阶段需要一次最小二乘(Least Squares, LS)拟合。
此外,本文还揭示了若干重要观察。
- 通过仿真,本文研究训练 SNR 对最终 MSE 性能的影响。具体而言,MLP 架构使用在特定 SNR 下生成的仿真数据进行训练,并在覆盖一系列给定 SNR 的测试数据集上评估网络性能。我们观察到训练过程中损失曲线稳步下降,说明模型能够有效学习并泛化到未见数据。针对过拟合问题,本文采用学习率调度。此外,本文展示了多种仿真结果,说明所提出方法与基准相比具有更优性能和潜力,并且接近 CRB 基准。
- 本文对两种所提出方法进行了全面的计算复杂度分析,重点统计其实现所需的乘法和加法总数。该分析包括对 DL 技术复杂度的详细考察;该技术使用三层隐藏层架构,并通过统计不同操作中的复杂度来完成分析。对于参数化方法,本文给出了与特定模块相关的计算复杂度分解,例如信道估计、粗定时估计和感知估计。这包括突出估计开销,并详细说明每个模块的总操作数。本文还给出了当前估计问题的最大似然准则,强调两种方法相对于最大似然估计器(Maximum Likelihood Estimator, MLE)所获得的显著复杂度降低。另外,仿真结果表明,与参数化二维估计过程相比,所提出 DL 技术具有更低的计算复杂度。例如,当接收天线数为 8 时,二维算法所需乘法次数是 DL 方法的 6.5 倍;换言之,DL 方法的乘法复杂度仅为二维算法的 15.27%。尽管存在性能下降,尤其是在较高 SNR 下,这些结果仍凸显出 DL 设计在计算效率和可扩展性方面的显著提升。
- 本文研究天线辐射方向图对双基地 ISAC 系统性能的影响。将这些方向图纳入系统模型之后,本文探索其参数变化如何影响 CRB。分析表明,更窄、更聚焦的波束需要更高 SNR 才能达到预设的目标感知 CRB。这一发现强调了天线设计选择和 ISAC 系统性能之间复杂的相互作用,也突出了在实际应用中集成辐射方向图特性以提升感知精度的重要性。
本文后续结构如下。第 II 节介绍以通信为中心的 ISAC 系统模型,以及全文使用的信道估计器和粗定时估计。第 III 节推导该估计问题的最大似然估计器。第 IV 节给出基于机器学习的 AoA 和 AoD 估计器,并分析其计算复杂度。第 V 节提出二维参数化估计器及其详细计算复杂度分析。第 VI 节通过数值结果验证分析,最后第 VII 节总结全文。
记号: 大写和小写粗体字母分别表示矩阵和向量。 ( ⋅ ) T (\cdot)^T (⋅)T、 ( ⋅ ) ∗ (\cdot)^* (⋅)∗、 ( ⋅ ) H (\cdot)^H (⋅)H 和 ( ⋅ ) † (\cdot)^\dagger (⋅)† 分别表示转置、共轭、共轭转置和伪逆算子。用 ∗ * ∗ 表示卷积算子。对于任意复数 z ∈ C z\in\mathbb{C} z∈C,其幅度记为 ∣ z ∣ |z| ∣z∣,相位记为 arg ( z ) \arg(z) arg(z)。 z z z 的实部记为 ℜ ( z ) \Re(z) ℜ(z),虚部记为 ℑ ( z ) \Im(z) ℑ(z)。向量 x \mathbf{x} x 的 ℓ 2 \ell_2 ℓ2 范数记为 ∥ x ∥ \|\mathbf{x}\| ∥x∥。矩阵 F \mathbf{F} F 和 I \mathbf{I} I 分别表示具有适当维度的傅里叶矩阵和单位矩阵。矩阵 A \mathbf{A} A 的第 ( i , j ) (i,j) (i,j) 个元素记为 A i , j \\mathbf{A}{i,j} Ai,j,其第 j j j 列记为 A : , j \mathbf{A}{:,j} A:,j。算子 ⊗ \otimes ⊗ 表示 Kronecker 积。大 O O O 记号写作 O ( ⋅ ) O(\cdot) O(⋅)。 r e s M , N ( x ) res_{M,N}(\mathbf{x}) resM,N(x) 是重塑算子,它返回一个维度为 M × N M\times N M×N 且包含与输入数据 x \mathbf{x} x 相同条目的数组。算子 mod y ( x ) \operatorname{mod}_y(x) mody(x) 表示 x / y x/y x/y 的余数。
II. 系统模型
考虑一个具有 N t N_t Nt 根天线的基站(Base Station, BS),它在下行链路中发送 OFDM 符号。不含 CP 的 OFDM 符号时长记为 T = 1 / Δ f T=1/\Delta f T=1/Δf,其中 Δ f \Delta f Δf 为子载波间隔。在表达发射符号之前,先描述与双基地雷达相关的无线信道。ISAC 框架可分为三类:以通信为中心、以雷达为中心,以及联合设计 23, 24。本文主要关注以通信为中心的 ISAC,其中雷达感知可被视为通信系统的一个"附加功能"25。这种设计方法的核心目标是利用通信波形,通过对目标回波进行信号处理来提取雷达信息。另一方面,在以雷达为中心的设计中,通常是在既有雷达波形中调制信息信号,例如 chirp 波形 26。联合设计类别则包括从一开始就协同设计的系统,以便在感知和通信性能之间实现灵活平衡 27, 2。
本文考察的场景中,通信信号由主要服务通信任务的 BS 发给各用户,雷达接收机利用反向散射的通信信号来精确估计目标感知参数,因此该配置可有效归入以通信为中心的 ISAC 类别。此外,本文使用通信标准中的前导知识执行感知任务,因此属于一种 ISAC 集成。已有文献也涉及通信中心式 ISAC。例如,28 描述了采用正交时频空间(Orthogonal Time Frequency Space, OTFS)数字调制的单基地 ISAC 设置;29 采用了时分双工(Time-Division Duplexing, TDD)大规模 MIMO 系统,其中 BS 为通信用户服务,同时利用散射信号感知环境。系统模型如 Fig. 1 所示。
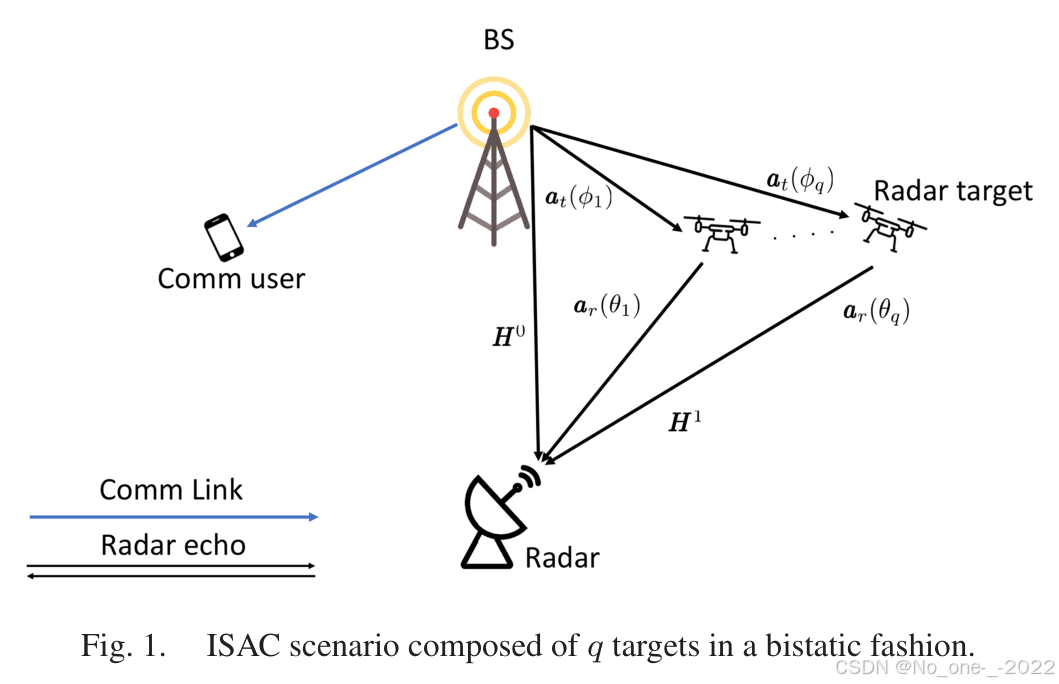
Fig. 1. 双基地 ISAC 中由 q q q 个目标组成的场景。
A. 双基地雷达信道模型
在无杂波、BS 与雷达单元之间无频偏和时偏、目标固定等简化假设下,BS 的第 n t n_t nt 根发射天线与雷达单元的第 n r n_r nr 根接收天线之间的一般信道冲激响应(Channel Impulse Response, CIR)可表示为
h n r , n t ( t , τ ) = ∑ m = 0 q α m a ˉ n r ( θ m ) a ˉ n t ( ϕ m ) δ ( τ − τ m ) . (1) h_{n_r,n_t}(t,\tau)=\sum_{m=0}^{q}\alpha_m\bar{a}{n_r}(\theta_m)\bar{a}{n_t}(\phi_m)\delta(\tau-\tau_m). \tag{1} hnr,nt(t,τ)=m=0∑qαmaˉnr(θm)aˉnt(ϕm)δ(τ−τm).(1)
其中,对于 N r N_r Nr 根接收天线和 N t N_t Nt 根发射天线,有 n r = 1 , ... , N r n_r=1,\ldots,N_r nr=1,...,Nr 且 n t = 1 , ... , N t n_t=1,\ldots,N_t nt=1,...,Nt。此外, α m \alpha_m αm 和 τ m \tau_m τm 分别表示第 m m m 个反射的信号衰减系数和延迟,并假设它们在参数估计期间保持时不变。函数 δ ( ⋅ ) \delta(\cdot) δ(⋅) 为 Dirac delta 函数, q q q 为目标数量。 θ m \theta_m θm 表示第 m m m 个目标与雷达单元之间的 AoA, ϕ m \phi_m ϕm 表示 BS 与第 m m m 个目标之间的 AoD。进一步地, a ˉ n t ( ϕ ) \bar{a}{n_t}(\phi) aˉnt(ϕ) 是 BS 第 n t n_t nt 根发射天线朝向角度 ϕ \phi ϕ 的实际导向系数;类似地, a ˉ n r ( θ ) \bar{a}{n_r}(\theta) aˉnr(θ) 是雷达第 n r n_r nr 根接收天线朝向角度 θ \theta θ 的实际导向系数。
通常,天线能够在特定方向辐射能量,从而在空间中的特定区域内实现定向辐射。这与全向天线不同,后者对所有空间坐标上的信号均匀响应。为刻画这一点,本文使用天线辐射方向图;它被定义为关于方向的复函数,其函数值给出远场区域中辐射场强度 30。假设 BS 使用相同但未知的发射天线,则发射导向矢量可定义为 31
a ˉ n t ( ϕ ) = g t ( ϕ ) a n t ( ϕ ) , (2) \bar{a}{n_t}(\phi)=g_t(\phi)a{n_t}(\phi), \tag{2} aˉnt(ϕ)=gt(ϕ)ant(ϕ),(2)
其中 g t ( ϕ ) g_t(\phi) gt(ϕ) 是角度 ϕ \phi ϕ 处的发射天线辐射方向图。类似地,接收导向矢量可定义为
a ˉ n r ( θ ) = g r ( θ ) a n r ( θ ) , (3) \bar{a}{n_r}(\theta)=g_r(\theta)a{n_r}(\theta), \tag{3} aˉnr(θ)=gr(θ)anr(θ),(3)
其中 g r ( θ ) g_r(\theta) gr(θ) 是接收天线辐射方向图,同样假设未知。注意,在 (2) 和 (3) 中,实际发射/接收导向矢量被写成假想各向同性导向矢量 a n t ( ϕ ) a_{n_t}(\phi) ant(ϕ) 和 a n r ( θ ) a_{n_r}(\theta) anr(θ) 的函数。换言之,若令 g t ( ϕ ) g_t(\phi) gt(ϕ)(以及类似的 g r ( θ ) g_r(\theta) gr(θ))为 1,则退化为假想各向同性情形。第一条路径,即 m = 0 m=0 m=0,表示 BS 与雷达单元之间的视距(Line of Sight, LoS)路径。式 (1) 给出的信道可在第 n n n 个子载波上以矩阵形式表示到离散频域中:
H n = A ˉ r ( Θ ) Ψ D n ( τ ) A ˉ t T ( Φ ) ∈ C N r × N t . (4) \mathbf{H}_n=\bar{\mathbf{A}}_r(\boldsymbol{\Theta})\boldsymbol{\Psi}\mathbf{D}_n(\boldsymbol{\tau})\bar{\mathbf{A}}_t^T(\boldsymbol{\Phi})\in\mathbb{C}^{N_r\times N_t}. \tag{4} Hn=Aˉr(Θ)ΨDn(τ)AˉtT(Φ)∈CNr×Nt.(4)
其中
A ˉ t ( Φ ) = a ˉ t ( ϕ 0 ) a ˉ t ( ϕ 1 ) ⋯ a ˉ t ( ϕ q ) , (5) \bar{\mathbf{A}}_t(\boldsymbol{\Phi}) = \begin{bmatrix} \bar{\mathbf{a}}_t(\phi_0) & \bar{\mathbf{a}}_t(\phi_1) & \cdots & \bar{\mathbf{a}}_t(\phi_q) \end{bmatrix}, \tag{5} Aˉt(Φ)=aˉt(ϕ0)aˉt(ϕ1)⋯aˉt(ϕq),(5)
并且
A ˉ r ( Θ ) = a ˉ r ( θ 0 ) a ˉ r ( θ 1 ) ⋯ a ˉ r ( θ q ) . (6) \bar{\mathbf{A}}_r(\boldsymbol{\Theta}) = \begin{bmatrix} \bar{\mathbf{a}}_r(\theta_0) & \bar{\mathbf{a}}_r(\theta_1) & \cdots & \bar{\mathbf{a}}_r(\theta_q) \end{bmatrix}. \tag{6} Aˉr(Θ)=aˉr(θ0)aˉr(θ1)⋯aˉr(θq).(6)
它们分别是由 BS-目标之间的 AoD 和目标-雷达之间的 AoA 形成的实际导向矩阵。此外, Ψ = diag ( α 0 ⋯ α q ) \boldsymbol{\Psi}=\operatorname{diag}(\\alpha_0\\ \\cdots\\ \\alpha_q) Ψ=diag(α0 ⋯ αq) 包含信号衰减系数; D n ( τ ) = diag ( c n ( τ 0 ) ⋯ c n ( τ q ) ) \mathbf{D}_n(\boldsymbol{\tau})=\operatorname{diag}(c_n(\\tau_0)\\ \\cdots\\ c_n(\\tau_q)) Dn(τ)=diag(cn(τ0) ⋯ cn(τq)) 是包含所有延迟的矩阵,其中 c n ( τ ) = e − j 2 π n Δ f τ c_n(\tau)=e^{-j2\pi n\Delta f\tau} cn(τ)=e−j2πnΔfτ。下一小节将描述雷达侧看到的频域接收信号。
利用 (2) 和 (3),实际导向矩阵可由其假想对应形式写为
A ˉ t ( Φ ) = G t ( Φ ) A t ( Φ ) , (7) \bar{\mathbf{A}}_t(\boldsymbol{\Phi})=\mathbf{G}_t(\boldsymbol{\Phi})\mathbf{A}_t(\boldsymbol{\Phi}), \tag{7} Aˉt(Φ)=Gt(Φ)At(Φ),(7)
以及
A ˉ r ( Θ ) = G r ( Θ ) A r ( Θ ) , (8) \bar{\mathbf{A}}_r(\boldsymbol{\Theta})=\mathbf{G}_r(\boldsymbol{\Theta})\mathbf{A}_r(\boldsymbol{\Theta}), \tag{8} Aˉr(Θ)=Gr(Θ)Ar(Θ),(8)
其中, G t ( Φ ) = diag ( g t ( ϕ 0 ) ⋯ g t ( ϕ q ) ) \mathbf{G}_t(\boldsymbol{\Phi})=\operatorname{diag}(g_t(\\phi_0)\\ \\cdots\\ g_t(\\phi_q)) Gt(Φ)=diag(gt(ϕ0) ⋯ gt(ϕq)) 且 G r ( Θ ) = diag ( g r ( θ 0 ) ⋯ g r ( θ q ) ) \mathbf{G}_r(\boldsymbol{\Theta})=\operatorname{diag}(g_r(\\theta_0)\\ \\cdots\\ g_r(\\theta_q)) Gr(Θ)=diag(gr(θ0) ⋯ gr(θq)),它们分别由 BS 阵列和雷达阵列处的天线辐射方向图影响产生。 A t ( Φ ) \mathbf{A}_t(\boldsymbol{\Phi}) At(Φ) 和 A r ( Θ ) \mathbf{A}_r(\boldsymbol{\Theta}) Ar(Θ) 是假想导向矩阵,其定义分别类似于 (5) 和 (6) 中的 A ˉ t ( Φ ) \bar{\mathbf{A}}_t(\boldsymbol{\Phi}) Aˉt(Φ) 和 A ˉ r ( Θ ) \bar{\mathbf{A}}_r(\boldsymbol{\Theta}) Aˉr(Θ)。将 (7) 和 (8) 代入 (4),并利用对角矩阵的可交换性,即任意两个对角矩阵 Y \mathbf{Y} Y 和 Z \mathbf{Z} Z 满足 Y Z = Z Y \mathbf{Y}\mathbf{Z}=\mathbf{Z}\mathbf{Y} YZ=ZY,可将模型概括为
H n = A r ( Θ ) G D n ( τ ) A t T ( Φ ) , (9) \mathbf{H}_n=\mathbf{A}_r(\boldsymbol{\Theta})\mathbf{G}\mathbf{D}_n(\boldsymbol{\tau})\mathbf{A}_t^T(\boldsymbol{\Phi}), \tag{9} Hn=Ar(Θ)GDn(τ)AtT(Φ),(9)
其中 G \mathbf{G} G 同时包含衰减分量以及发射/接收天线辐射方向图,即 G = G r ( Θ ) Ψ G t ( Φ ) \mathbf{G}=\mathbf{G}_r(\boldsymbol{\Theta})\boldsymbol{\Psi}\mathbf{G}_t(\boldsymbol{\Phi}) G=Gr(Θ)ΨGt(Φ)。注意, G \mathbf{G} G 保持对角结构,并可表示为
G = diag ( α 0 g t ( ϕ 0 ) g r ( θ 0 ) ⋯ α q g t ( ϕ q ) g r ( θ q ) ) . \mathbf{G}=\operatorname{diag}\left( \begin{bmatrix} \alpha_0g_t(\phi_0)g_r(\theta_0) & \cdots & \alpha_qg_t(\phi_q)g_r(\theta_q) \end{bmatrix} \right). G=diag(α0gt(ϕ0)gr(θ0)⋯αqgt(ϕq)gr(θq)).
为简化记号,本文记 α ˘ k = α k g t ( ϕ k ) g r ( θ k ) \breve{\alpha}_k=\alpha_kg_t(\phi_k)g_r(\theta_k) α˘k=αkgt(ϕk)gr(θk),并将 α ˘ k \breve{\alpha}_k α˘k 视为一个未知量;它包含信道未知分量以及发射/接收天线辐射方向图的影响。
B. 雷达信号模型
BS 发送 K K K 个 OFDM 信号为场景中的通信用户服务。第 k k k 个 OFDM 信号可表示为
x k ( t ) = ∑ n = 1 N s n , k c n ( − t ) Π ( t − k T o ) , ∀ k = 1 , ... , K , (10) x_k(t)=\sum_{n=1}^{N}\mathbf{s}_{n,k}c_n(-t)\Pi(t-kT_o),\quad \forall k=1,\ldots,K, \tag{10} xk(t)=n=1∑Nsn,kcn(−t)Π(t−kTo),∀k=1,...,K,(10)
其中 N N N 是每个 K K K 个 OFDM 符号中占用的有效子载波数量, T o = T + T C P T_o=T+T_{CP} To=T+TCP 是总 OFDM 符号时长。此外, Π ( t ) \Pi(t) Π(t) 是窗函数。本文假设理想矩形函数:
Π ( t ) = { 1 , t ∈ − T C P , T , 0 , o t h e r w i s e . (11) \Pi(t)= \left\{ \begin{array}{ll} 1, & t\in-T_{CP},T,\\ 0, & \mathrm{otherwise}. \end{array} \right. \tag{11} Π(t)={1,0,t∈−TCP,T,otherwise.(11)
其中 T C P T_{CP} TCP 为 CP 时长,它应大于最大传播延迟,以保证与信道发生循环卷积。此外, s n , k ∈ C N t × 1 \mathbf{s}{n,k}\in\mathbb{C}^{N_t\times 1} sn,k∈CNt×1 是第 k k k 个 OFDM 符号内调制到第 n n n 个 OFDM 子载波上的符号。注意,对于预编码 OFDM, s n , k \mathbf{s}{n,k} sn,k 只表示在预编码与第 k k k 个传输块相关的数据符号之后,第 n n n 个子载波上实际要发射的信号。结合 (4)、(10)、(11),并应用快速傅里叶变换(Fast Fourier Transform, FFT),雷达单元在第 n n n 个子载波和第 k k k 个 OFDM 符号上读取的数据为
y n , k = H n s n , k + w n , k ∈ C N r × 1 . (12) \mathbf{y}{n,k}=\mathbf{H}n\mathbf{s}{n,k}+\mathbf{w}{n,k}\in\mathbb{C}^{N_r\times 1}. \tag{12} yn,k=Hnsn,k+wn,k∈CNr×1.(12)
向量 w n , k \mathbf{w}_{n,k} wn,k 是第 n n n 个子载波和第 k k k 个符号上的加性白高斯噪声(Additive White Gaussian Noise, AWGN),均值为零,协方差为 σ 2 I \sigma^2\mathbf{I} σ2I。本文关注以通信为中心的 ISAC 问题,其中已有基础设施执行通信任务,而雷达单元用于估计不同目标的感知参数。
C. 信道估计
本小节描述用于基于 DL 方法和参数化方法估计 AoA/AoD 的信道估计量。假设发射 K P K_P KP 个 OFDM 符号,每个符号占用 N P N_P NP 个子载波,并且雷达单元已知被发送的数据符号,则信道估计可通过经典 LS 完成:
H ˉ n = Y n S P , n H ( S P , n S P , n H ) − 1 . (13) \bar{\mathbf{H}}n=\mathbf{Y}n\mathbf{S}{P,n}^H(\mathbf{S}{P,n}\mathbf{S}_{P,n}^H)^{-1}. \tag{13} Hˉn=YnSP,nH(SP,nSP,nH)−1.(13)
其中, Y n \mathbf{Y}n Yn 包含所有导频 OFDM 符号,即 { y n , k } k = 1 K P \{\mathbf{y}{n,k}\}{k=1}^{K_P} {yn,k}k=1KP。类似地, S P , n \mathbf{S}{P,n} SP,n 包含已知导频信息 { s n , k } k = 1 K P \{\mathbf{s}{n,k}\}{k=1}^{K_P} {sn,k}k=1KP。注意, H ˉ n = H n + W P , n S P , n H ( S P , n S P , n H ) − 1 \bar{\mathbf{H}}n=\mathbf{H}n+\mathbf{W}{P,n}\mathbf{S}{P,n}^H(\mathbf{S}{P,n}\mathbf{S}{P,n}^H)^{-1} Hˉn=Hn+WP,nSP,nH(SP,nSP,nH)−1。为了更方便地表示信道状态信息(Channel State Information, CSI)估计,写作
H ˉ = vec ( H ˉ 1 ) vec ( H ˉ 2 ) ⋯ vec ( H ˉ N P ) , (14) \bar{\mathbf{H}} = \begin{bmatrix} \operatorname{vec}(\bar{\mathbf{H}}_1) & \operatorname{vec}(\bar{\mathbf{H}}2) & \cdots & \operatorname{vec}(\bar{\mathbf{H}}{N_P}) \end{bmatrix}, \tag{14} Hˉ=vec(Hˉ1)vec(Hˉ2)⋯vec(HˉNP),(14)
其中 H ˉ ∈ C N t N r × N P \bar{\mathbf{H}}\in\mathbb{C}^{N_tN_r\times N_P} Hˉ∈CNtNr×NP,其每一行包含一个发射/接收天线组合在所有频率上的频域信道。可将 H ˉ \bar{\mathbf{H}} Hˉ 表示为真实项和噪声项之和:
H ˉ = H + W ˉ , (15) \bar{\mathbf{H}}=\mathbf{H}+\bar{\mathbf{W}}, \tag{15} Hˉ=H+Wˉ,(15)
其中 H = vec ( H 1 ) ⋯ vec ( H N P ) \mathbf{H}=\\operatorname{vec}(\\mathbf{H}_1)\\ \\cdots\\ \\operatorname{vec}(\\mathbf{H}_{N_P}) H=vec(H1) ⋯ vec(HNP),且
W ˉ = vec ( W P , 1 S P , 1 † ) ⋯ vec ( W P , N P S P , N P † ) . (16) \bar{\mathbf{W}} = \begin{bmatrix} \operatorname{vec}(\mathbf{W}{P,1}\mathbf{S}{P,1}^{\dagger}) & \cdots & \operatorname{vec}(\mathbf{W}{P,N_P}\mathbf{S}{P,N_P}^{\dagger}) \end{bmatrix}. \tag{16} Wˉ=vec(WP,1SP,1†)⋯vec(WP,NPSP,NP†).(16)
其中,为简记, S P , n † \mathbf{S}{P,n}^{\dagger} SP,n† 表示 S P , n \mathbf{S}{P,n} SP,n 的伪逆,即对所有 n n n 有 S P , n † = S P , n H ( S P , n S P , n H ) − 1 \mathbf{S}{P,n}^{\dagger}=\mathbf{S}{P,n}^H(\mathbf{S}{P,n}\mathbf{S}{P,n}^H)^{-1} SP,n†=SP,nH(SP,nSP,nH)−1。
注:
接收合并器固定的混合接收情形。 若对固定子载波 n n n,接收端模拟合并器在不同训练符号 k k k 上保持不变,即 U n , k = U n \mathbf U_{n,k}=\mathbf U_n Un,k=Un,则点除已知标量符号后的观测为
y ~ n , k = U n H H n f n , k + w ~ n , k . \tilde{\mathbf y}{n,k} = \mathbf U_n^{H}\mathbf H_n\mathbf f{n,k} + \tilde{\mathbf w}_{n,k}. y~n,k=UnHHnfn,k+w~n,k.
将 K P K_P KP 个训练符号堆叠,可得
Y ~ n = U n H H n F n + W ~ n , F n = f n , 1 , ... , f n , K P . \tilde{\mathbf Y}_n = \mathbf U_n^{H}\mathbf H_n\mathbf F_n + \tilde{\mathbf W}_n, \qquad \mathbf F_n= \\mathbf f_{n,1},\\ldots,\\mathbf f_{n,K_P}. Y~n=UnHHnFn+W~n,Fn=fn,1,...,fn,KP.
如果 F n \mathbf F_n Fn 满行秩且条件数良好,即 rank ( F n ) = N t \operatorname{rank}(\mathbf F_n)=N_t rank(Fn)=Nt,则可右乘伪逆消去发射训练矩阵:
H ^ n , e f f = Y ~ n F n H ( F n F n H ) − 1 ≈ U n H H n . \widehat{\mathbf H}_{n,\mathrm{eff}} = \tilde{\mathbf Y}_n \mathbf F_n^{H} (\mathbf F_n\mathbf F_n^{H})^{-1} \approx \mathbf U_n^{H}\mathbf H_n. H n,eff=Y~nFnH(FnFnH)−1≈UnHHn.
因此,在接收端存在模拟压缩且 U n \mathbf U_n Un 不变时,发射端满秩训练只能恢复接收压缩后的等效信道 U n H H n ∈ C R r × N t \mathbf U_n^H\mathbf H_n\in\mathbb{C}^{R_r\times N_t} UnHHn∈CRr×Nt。除非接收端也通过足够多的独立合并配置覆盖完整接收阵列维度,否则无法仅凭该式恢复完整 H n ∈ C N r × N t \mathbf H_n\in\mathbb{C}^{N_r\times N_t} Hn∈CNr×Nt。
式 (13) 的隐含接收假设。 这里的 LS 信道估计默认雷达接收端能够直接获得完整的 N r N_r Nr 维接收向量 y n , k \mathbf{y}{n,k} yn,k,因此可以估计完整的 H n ∈ C N r × N t \mathbf{H}n\in\mathbb{C}^{N_r\times N_t} Hn∈CNr×Nt。若接收端存在模拟合并器 U n , k ∈ C N r × R r \mathbf U{n,k}\in\mathbb{C}^{N_r\times R_r} Un,k∈CNr×Rr,且发射端第 k k k 个训练符号的有效发射波束为 f n , k = W n , k 1 ∈ C N t × 1 \mathbf f{n,k}=\mathbf W_{n,k}\mathbf 1\in\mathbb{C}^{N_t\times1} fn,k=Wn,k1∈CNt×1,则点除已知标量符号后的观测应写成
y ~ n , k = U n , k H H n f n , k + w ~ n , k . \tilde{\mathbf y}{n,k} = \mathbf U{n,k}^{H}\mathbf H_n\mathbf f_{n,k} + \tilde{\mathbf w}_{n,k}. y~n,k=Un,kHHnfn,k+w~n,k.
此时若 U n , k \mathbf U_{n,k} Un,k 也随 k k k 改变,就不能只要求 F n = f n , 1 , ... , f n , K P \mathbf F_n=\\mathbf f_{n,1},\\ldots,\\mathbf f_{n,K_P} Fn=fn,1,...,fn,KP 满秩。更一般地,向量化后有
y ~ n , k = ( f n , k T ⊗ U n , k H ) vec ( H n ) + w ~ n , k . \tilde{\mathbf y}{n,k} = \left( \mathbf f{n,k}^{T}\otimes\mathbf U_{n,k}^{H} \right) \operatorname{vec}(\mathbf H_n) + \tilde{\mathbf w}_{n,k}. y~n,k=(fn,kT⊗Un,kH)vec(Hn)+w~n,k.
将所有 k k k 堆叠后,只有整体 Kronecker 测量矩阵
A n = f n , 1 T ⊗ U n , 1 H f n , 2 T ⊗ U n , 2 H ⋮ f n , K P T ⊗ U n , K P H \mathbf A_n= \begin{bmatrix} \mathbf f_{n,1}^{T}\otimes\mathbf U_{n,1}^{H}\\ \mathbf f_{n,2}^{T}\otimes\mathbf U_{n,2}^{H}\\ \vdots\\ \mathbf f_{n,K_P}^{T}\otimes\mathbf U_{n,K_P}^{H} \end{bmatrix} An= fn,1T⊗Un,1Hfn,2T⊗Un,2H⋮fn,KPT⊗Un,KPH
满列秩且条件数良好时,才可以通过 LS 恢复完整 H n \mathbf H_n Hn。如果接收合并器固定不变,则发射端满秩通常只能恢复接收压缩后的等效信道 U H H n \mathbf U^H\mathbf H_n UHHn,而不是完整天线域信道。
为什么式 (13) 可以直接取 S P , n \mathbf S_{P,n} SP,n 的伪逆。 论文式 (13) 写成
H ˉ n = Y n S P , n H ( S P , n S P , n H ) − 1 , \bar{\mathbf H}n = \mathbf Y_n \mathbf S{P,n}^{H} \left( \mathbf S_{P,n} \mathbf S_{P,n}^{H} \right)^{-1}, Hˉn=YnSP,nH(SP,nSP,nH)−1,
隐含前提是 S P , n ∈ C N t × K P \mathbf S_{P,n}\in\mathbb C^{N_t\times K_P} SP,n∈CNt×KP 已经是从 N t N_t Nt 根发射天线实际发出的天线域训练矩阵。也就是说,发射端可以直接设计一个满行秩训练矩阵,使
rank ( S P , n ) = N t , S P , n S P , n H ≈ K P I N t . \operatorname{rank}(\mathbf S_{P,n})=N_t, \qquad \mathbf S_{P,n}\mathbf S_{P,n}^{H} \approx K_P\mathbf I_{N_t}. rank(SP,n)=Nt,SP,nSP,nH≈KPINt.
在这种全数字训练假设下,右乘 S P , n \mathbf S_{P,n} SP,n 的伪逆自然很直接。
但在混合模拟-数字预编码结构中,天线域训练矩阵不能任意选取,而必须写成
S P , n e f f = W n , ℓ S n , ℓ , \mathbf S_{P,n}^{\mathrm{eff}} = \mathbf W_{n,\ell}\mathbf S_{n,\ell}, SP,neff=Wn,ℓSn,ℓ,
其中 W n , ℓ ∈ C N t × R s \mathbf W_{n,\ell}\in\mathbb C^{N_t\times R_s} Wn,ℓ∈CNt×Rs 是等效发射预编码矩阵, S n , ℓ ∈ C R s × K P \mathbf S_{n,\ell}\in\mathbb C^{R_s\times K_P} Sn,ℓ∈CRs×KP 是导频矩阵。单组配置满足
rank ( W n , ℓ S n , ℓ ) ≤ R s ≪ N t , \operatorname{rank} ( \mathbf W_{n,\ell}\mathbf S_{n,\ell} ) \le R_s \ll N_t, rank(Wn,ℓSn,ℓ)≤Rs≪Nt,
因而无法像式 (13) 那样直接构造一个 N t N_t Nt 维满秩的 S P , n \mathbf S_{P,n} SP,n。这就是为什么混合结构下通常需要多组发射预编码配置,将
W n , 1 S n , 1 , ... , W n , L c S n , L c \] \[ \\mathbf W_{n,1}\\mathbf S_{n,1}, \\ldots, \\mathbf W_{n,L_c}\\mathbf S_{n,L_c} \] \[Wn,1Sn,1,...,Wn,LcSn,Lc
拼成整体满行秩的等效训练矩阵。差别不在 LS 公式本身,而在硬件约束改变了可实现的训练矩阵集合。
多 RF 数据流/导频流的情形。 为避免记号混淆,这里把 ℓ = 1 , ... , L c \ell=1,\ldots,L_c ℓ=1,...,Lc 作为发射预编码配置索引,把 k = 1 , ... , K P k=1,\ldots,K_P k=1,...,KP 作为同一配置下的训练 OFDM 符号索引。对固定子载波 n n n,若接收合并器在这些训练中保持为 U n \mathbf U_n Un,第 ℓ \ell ℓ 组发射端等效预编码矩阵记为
W n , ℓ = F R F , n , ℓ F B B , n , ℓ ∈ C N t × R s . \mathbf W_{n,\ell} = \mathbf F_{\mathrm{RF},n,\ell} \mathbf F_{\mathrm{BB},n,\ell} \in\mathbb C^{N_t\times R_s}. Wn,ℓ=FRF,n,ℓFBB,n,ℓ∈CNt×Rs.
其中 F R F , n , ℓ \mathbf F_{\mathrm{RF},n,\ell} FRF,n,ℓ 是模拟预编码, F B B , n , ℓ \mathbf F_{\mathrm{BB},n,\ell} FBB,n,ℓ 是已知数字预编码, R s R_s Rs 是同时发送的导频流数。若不单独区分数字预编码,也可以直接把 W n , ℓ \mathbf W_{n,\ell} Wn,ℓ 理解为已知的等效发射波束赋形矩阵。
第 ℓ \ell ℓ 组配置、第 k k k 个训练符号的观测为
y n , ℓ , k = U n H H n W n , ℓ s n , ℓ , k + w n , ℓ , k , s n , ℓ , k ∈ C R s × 1 . \mathbf y_{n,\ell,k} = \mathbf U_n^{H} \mathbf H_n \mathbf W_{n,\ell} \mathbf s_{n,\ell,k} + \mathbf w_{n,\ell,k}, \qquad \mathbf s_{n,\ell,k}\in\mathbb C^{R_s\times1}. yn,ℓ,k=UnHHnWn,ℓsn,ℓ,k+wn,ℓ,k,sn,ℓ,k∈CRs×1.
在固定 ℓ \ell ℓ 下堆叠 K P K_P KP 个训练 OFDM 符号:
Y n , ℓ = y n , ℓ , 1 , ... , y n , ℓ , K P ∈ C R r × K P , \mathbf Y_{n,\ell} = \\mathbf y_{n,\\ell,1},\\ldots,\\mathbf y_{n,\\ell,K_P} \in\mathbb C^{R_r\times K_P}, Yn,ℓ=yn,ℓ,1,...,yn,ℓ,KP∈CRr×KP,
S n , ℓ = s n , ℓ , 1 , ... , s n , ℓ , K P ∈ C R s × K P . \mathbf S_{n,\ell} = \\mathbf s_{n,\\ell,1},\\ldots,\\mathbf s_{n,\\ell,K_P} \in\mathbb C^{R_s\times K_P}. Sn,ℓ=sn,ℓ,1,...,sn,ℓ,KP∈CRs×KP.
于是
Y n , ℓ = U n H H n W n , ℓ S n , ℓ + N n , ℓ . \mathbf Y_{n,\ell} = \mathbf U_n^{H} \mathbf H_n \mathbf W_{n,\ell} \mathbf S_{n,\ell} + \mathbf N_{n,\ell}. Yn,ℓ=UnHHnWn,ℓSn,ℓ+Nn,ℓ.
如果 S n , ℓ \mathbf S_{n,\ell} Sn,ℓ 满行秩且条件数良好,即 rank ( S n , ℓ ) = R s \operatorname{rank}(\mathbf S_{n,\ell})=R_s rank(Sn,ℓ)=Rs,则可先通过 LS 消去导频矩阵:
Z n , ℓ = Y n , ℓ S n , ℓ H ( S n , ℓ S n , ℓ H ) − 1 ≈ U n H H n W n , ℓ . \mathbf Z_{n,\ell} = \mathbf Y_{n,\ell} \mathbf S_{n,\ell}^{H} \left( \mathbf S_{n,\ell} \mathbf S_{n,\ell}^{H} \right)^{-1} \approx \mathbf U_n^H\mathbf H_n\mathbf W_{n,\ell}. Zn,ℓ=Yn,ℓSn,ℓH(Sn,ℓSn,ℓH)−1≈UnHHnWn,ℓ.
这里"导频功率为 1"只表示能量归一化,并不自动保证满秩。真正需要的是不同导频流在 K P K_P KP 个训练符号上彼此线性独立,理想情况下可设计成 S n , ℓ S n , ℓ H = K P I R s \mathbf S_{n,\ell}\mathbf S_{n,\ell}^{H}=K_P\mathbf I_{R_s} Sn,ℓSn,ℓH=KPIRs。
对所有 L c L_c Lc 组发射预编码配置横向堆叠:
Z a l l = Z n , 1 , ... , Z n , L c ≈ U n H H n W a l l , \mathbf Z_{\mathrm{all}} = \\mathbf Z_{n,1},\\ldots,\\mathbf Z_{n,L_c} \approx \mathbf U_n^H\mathbf H_n\mathbf W_{\mathrm{all}}, Zall=Zn,1,...,Zn,Lc≈UnHHnWall,
其中
W a l l = W n , 1 , ... , W n , L c ∈ C N t × L c R s . \mathbf W_{\mathrm{all}} = \\mathbf W_{n,1},\\ldots,\\mathbf W_{n,L_c} \in\mathbb C^{N_t\times L_cR_s}. Wall=Wn,1,...,Wn,Lc∈CNt×LcRs.
若 W a l l \mathbf W_{\mathrm{all}} Wall 满行秩且条件数良好,即
rank ( W a l l ) = N t , \operatorname{rank}(\mathbf W_{\mathrm{all}})=N_t, rank(Wall)=Nt,
则可右乘其伪逆,恢复接收压缩后的等效信道:
H ^ n , e f f = Z a l l W a l l H ( W a l l W a l l H ) − 1 ≈ U n H H n . \widehat{\mathbf H}{n,\mathrm{eff}} = \mathbf Z{\mathrm{all}} \mathbf W_{\mathrm{all}}^H (\mathbf W_{\mathrm{all}}\mathbf W_{\mathrm{all}}^H)^{-1} \approx \mathbf U_n^H\mathbf H_n. H n,eff=ZallWallH(WallWallH)−1≈UnHHn.
注意,这一步恢复的是 U n H H n \mathbf U_n^H\mathbf H_n UnHHn,仍不是完整的 H n \mathbf H_n Hn。若要恢复完整天线域信道,还需要接收端也使用多组足够独立的合并矩阵,使整体 Kronecker 测量矩阵满列秩。
与之相比,若所有 RF 链只发送同一个标量符号,即 s n , ℓ , k = s n , ℓ , k 1 \mathbf s_{n,\ell,k}=s_{n,\ell,k}\mathbf 1 sn,ℓ,k=sn,ℓ,k1,则每个发射配置只产生一个等效发射向量
f n , ℓ = W n , ℓ 1 ∈ C N t × 1 . \mathbf f_{n,\ell} = \mathbf W_{n,\ell}\mathbf 1 \in\mathbb C^{N_t\times1}. fn,ℓ=Wn,ℓ1∈CNt×1.
此时堆叠矩阵变为
F n = f n , 1 , ... , f n , L c = W n , 1 1 , ... , W n , L c 1 ∈ C N t × L c . \mathbf F_n = \\mathbf f_{n,1},\\ldots,\\mathbf f_{n,L_c} = \\mathbf W_{n,1}\\mathbf 1,\\ldots,\\mathbf W_{n,L_c}\\mathbf 1 \in\mathbb C^{N_t\times L_c}. Fn=fn,1,...,fn,Lc=Wn,11,...,Wn,Lc1∈CNt×Lc.
要恢复 U n H H n \mathbf U_n^H\mathbf H_n UnHHn,需要 rank ( F n ) = N t \operatorname{rank}(\mathbf F_n)=N_t rank(Fn)=Nt。因此,多 RF 导频流的优势是保留了每个 W n , ℓ \mathbf W_{n,\ell} Wn,ℓ 的 R s R_s Rs 个列方向,而单流同符号只保留 W n , ℓ 1 \mathbf W_{n,\ell}\mathbf 1 Wn,ℓ1 这一个合成方向。在理想独立设计下,多流配置数下限约为 ⌈ N t / R s ⌉ \lceil N_t/R_s\rceil ⌈Nt/Rs⌉,单流配置数下限约为 N t N_t Nt;所以通常更容易满足的是 rank ( W a l l ) = N t \operatorname{rank}(\mathbf W_{\mathrm{all}})=N_t rank(Wall)=Nt,而不是 rank ( F n ) = N t \operatorname{rank}(\mathbf F_n)=N_t rank(Fn)=Nt。
已知发射符号是否点除。 若发射符号 s n , k s_{n,k} sn,k 已知且非零,不点除并不会让 H n \mathbf H_n Hn 更容易估计。未点除时模型为
y n , k = s n , k U n , k H H n f n , k + w n , k , \mathbf y_{n,k} = s_{n,k} \mathbf U_{n,k}^{H}\mathbf H_n\mathbf f_{n,k} + \mathbf w_{n,k}, yn,k=sn,kUn,kHHnfn,k+wn,k,
相当于把 s n , k s_{n,k} sn,k 吸收到测量矩阵中:
y n , k = s n , k ( f n , k T ⊗ U n , k H ) vec ( H n ) + w n , k . \mathbf y_{n,k} = s_{n,k} \left( \mathbf f_{n,k}^{T}\otimes\mathbf U_{n,k}^{H} \right) \operatorname{vec}(\mathbf H_n) + \mathbf w_{n,k}. yn,k=sn,k(fn,kT⊗Un,kH)vec(Hn)+wn,k.
当 ∣ s n , k ∣ = 1 |s_{n,k}|=1 ∣sn,k∣=1 时,点除与不点除在秩条件和噪声方差上等价;当 ∣ s n , k ∣ |s_{n,k}| ∣sn,k∣ 不同时,更规范的做法是保留 s n , k s_{n,k} sn,k 并进行加权 LS,避免小幅度符号导致噪声放大。若 s n , k s_{n,k} sn,k 未知,则问题会变成关于 s n , k s_{n,k} sn,k 和 H n \mathbf H_n Hn 的双线性估计,存在尺度模糊,不能再直接用普通 LS 求解。
D. 粗定时估计
为了估计 AoA 和 AoD,可以降低式 (14) 中信道估计矩阵的规模,从而减少机器学习(Machine Learning, ML)算法的输入尺寸。由于 H ˉ \bar{\mathbf{H}} Hˉ 的每一行表示给定发射/接收天线对上的频域信道,可以对 (14) 的行执行逆快速傅里叶变换(Inverse Fast Fourier Transform, IFFT),并寻找与目标反射时延对应的峰值。这可被解释为对延迟的粗定时估计,即延迟被估计为采样时间的整数倍。注意,AoA 和 AoD 与时域峰值的相位有直接关系,因此,可使用由这些峰值组成的 N t × N r N_t\times N_r Nt×Nr 矩阵来估计这些参数,而不是使用更大的 (14) 矩阵。该方法简述如下。
对每个发射/接收天线对执行 IFFT:
h ˉ n = IFFT ( H ˉ n , : ) = F H H ˉ n , : T , ∀ n = 1 , ... , N r N t . (17) \begin{aligned} \bar{\mathbf{h}}n &=\operatorname{IFFT}\left(\bar{\mathbf{H}}{n,:}\right)\\ &=\mathbf{F}^H\bar{\mathbf{H}}^T_{n,:},\quad \forall n=1,\ldots,N_rN_t. \end{aligned} \tag{17} hˉn=IFFT(Hˉn,:)=FHHˉn,:T,∀n=1,...,NrNt.(17)
随后,任务基本上是从 h ˉ n = h ˉ n \[ 1 ⋯ h ˉ n N P ] ∈ C N P \bar{\mathbf{h}}_n=\\bar{\\mathbf{h}}_n\[1\ \cdots\ \bar{\mathbf{h}}_nN_P]\in\mathbb{C}^{N_P} hˉn=hˉn\[1 ⋯ hˉnNP]∈CNP 的所有天线对幅度 ∣ h ˉ n k ∣ |\bar{\mathbf{h}}_nk| ∣hˉnk∣ 中,寻找与 q q q 个最可能峰值对应的索引 k k k,定义为
k ∈ { i ^ 1 , ... , i ^ q } . (18) k\in\{\hat{i}_1,\ldots,\hat{i}_q\}. \tag{18} k∈{i^1,...,i^q}.(18)
这些索引通过分析所有 N t N r N_tN_r NtNr 个天线对的峰值得到。注意,通过缩放索引可获得到达时间(Time of Arrival, ToA)的粗估计,即 τ ^ k = i ^ k / ( N P Δ f ) \hat{\tau}_k=\hat{i}_k/(N_P\Delta f) τ^k=i^k/(NPΔf), ∀ k = 1 , ... , q \forall k=1,\ldots,q ∀k=1,...,q。
考虑两个极端情形。第一,在完全分离情形中,即所有 i k i_k ik 互不相同( i 1 ≠ i 2 ≠ ⋯ ≠ i q i_1\neq i_2\neq \cdots\neq i_q i1=i2=⋯=iq),可以容易验证, F H H ˉ T \mathbf{F}^H\bar{\mathbf{H}}^T FHHˉT 的第 i k i_k ik 行是唯一包含关于 θ k \theta_k θk 和 ϕ k \phi_k ϕk 信息的行。第二,在另一个极端情形中,所有 τ k \tau_k τk 都落入同一个时间索引,即 i ≜ i 1 = i 2 = ⋯ = i q i\triangleq i_1=i_2=\cdots=i_q i≜i1=i2=⋯=iq,则 F H H ˉ T \mathbf{F}^H\bar{\mathbf{H}}^T FHHˉT 的第 i i i 行是唯一包含全部 AoA 和 AoD 信息的行。为了适应最坏情形,本文描述一种能够区分所有 AoA 和 AoD 的算法。在该情形下, F H H ˉ T \mathbf{F}^H\bar{\mathbf{H}}^T FHHˉT 的第 i i i 行可重塑为
H ^ = r e s N r , N t ( F H ) \[ i , : H ˉ T ] = A r ( Θ ) G A t T ( Φ ) + W ~ . (19) \begin{aligned} \hat{\mathbf{H}} &=res_{N_r,N_t}\left(\\mathbf{F}\^H)_{\[i,:}\bar{\mathbf{H}}^T\right]\\ &=\mathbf{A}_r(\boldsymbol{\Theta})\mathbf{G}\mathbf{A}_t^T(\boldsymbol{\Phi})+\tilde{\mathbf{W}}. \end{aligned} \tag{19} H^=resNr,Nt(FH)\[i,:HˉT]=Ar(Θ)GAtT(Φ)+W~.(19)
其中 W ~ = r e s N r , N t ( F H ) \[ i , : W ˉ T ] \tilde{\mathbf{W}}=res_{N_r,N_t}(\\mathbf{F}\^H)_{\[i,:}\bar{\mathbf{W}}^T] W~=resNr,Nt(FH)\[i,:WˉT], W ˉ \bar{\mathbf{W}} Wˉ 已在 (16) 中定义。对于完全分离情形, F H H ˉ T \mathbf{F}^H\bar{\mathbf{H}}^T FHHˉT 的第 i k i_k ik 行将为 α k g t ( ϕ k ) g r ( θ k ) a r ( θ k ) a t T ( ϕ k ) + W ~ k \alpha_kg_t(\phi_k)g_r(\theta_k)\mathbf{a}_r(\theta_k)\mathbf{a}_t^T(\phi_k)+\tilde{\mathbf{W}}_k αkgt(ϕk)gr(θk)ar(θk)atT(ϕk)+W~k,即 (19) 的特殊情形。也可以讨论一种中间情形,其中某些路径,例如 p < q p<q p<q 条路径,落入同一个 bin。此时,对应行仍可写成 (19),但维度 q q q 需要替换为 p p p。
需要注意的是,信道估计和粗定时估计本质上都是通信领域中的经典方法。例如,信道估计过程对应成熟的 LS;粗定时估计过程也可用于通信帧同步。因此,本文的主要目标是说明:通过应用熟悉的预处理技术,也可以有效实现感知。这些技术被研究社区广泛认可,并且易于实现。
III. 最大似然估计器
本节描述观测数据 (12) 的确定性 MLE 准则。确定性 MLE 将样本函数视为未知确定性序列,而不是随机过程。为此,数据的联合密度函数可表示为
f ( Y ) = ∏ n = 1 N P ∏ k = 1 K P 1 π det ( σ 2 I ) exp ( − 1 σ 2 ∥ y n , k − H n s n , k ∥ 2 ) . f(\mathbf{Y})= \prod_{n=1}^{N_P}\prod_{k=1}^{K_P} \frac{1}{\pi\det(\sigma^2\mathbf{I})} \exp\left(-\frac{1}{\sigma^2} \left\|\mathbf{y}_{n,k}-\mathbf{H}n\mathbf{s}{n,k}\right\|^2 \right). f(Y)=n=1∏NPk=1∏KPπdet(σ2I)1exp(−σ21∥yn,k−Hnsn,k∥2).
其中, Y \mathbf{Y} Y 的第 k k k 列为 Y : , k = y 1 , k ⋯ y N P , k T \mathbf{Y}{:,k}=\\mathbf{y}_{1,k}\\ \\cdots\\ \\mathbf{y}_{N_P,k}^T Y:,k=y1,k ⋯ yNP,kT。注意, f ( Y ) f(\mathbf{Y}) f(Y) 以导频 s n , k \mathbf{s}{n,k} sn,k、 σ 2 \sigma^2 σ2、 α ˘ = α ˘ 0 ⋯ α ˘ q \breve{\boldsymbol{\alpha}}=\\breve{\\alpha}_0\\ \\cdots\\ \\breve{\\alpha}_q α˘=α˘0 ⋯ α˘q、 Θ \boldsymbol{\Theta} Θ 和 Φ \boldsymbol{\Phi} Φ 为条件;为简洁起见,记号中省略了这种依赖。对数似然可写为
L ≜ log f ( Y ) = g ( σ 2 ) − 1 σ 2 ∑ n = 1 N P ∑ k = 1 K P ∥ y n , k − H n s n , k ∥ 2 , \begin{aligned} L\triangleq \log f(\mathbf{Y}) &=g(\sigma^2)-\frac{1}{\sigma^2} \sum_{n=1}^{N_P}\sum_{k=1}^{K_P} \left\|\mathbf{y}_{n,k}-\mathbf{H}n\mathbf{s}{n,k}\right\|^2, \end{aligned} L≜logf(Y)=g(σ2)−σ21n=1∑NPk=1∑KP∥yn,k−Hnsn,k∥2,
其中 g g g 仅是 σ 2 \sigma^2 σ2 的函数。由于本文关注感知参数,可将 MLE 重写为
arg min α ˘ , Θ , Φ , τ ∥ Y − I N P ⊗ A r ( Θ ) G D ( τ ) I N P ⊗ A t T ( Φ ) S ∥ 2 . (20) \operatorname*{arg\,min}_{\breve{\boldsymbol{\alpha}},\boldsymbol{\Theta},\boldsymbol{\Phi},\boldsymbol{\tau}} \left\| \mathbf{Y}- \\mathbf{I}_{N_P}\\otimes\\mathbf{A}_r(\\boldsymbol{\\Theta})\\mathbf{G} \mathbf{D}(\boldsymbol{\tau}) \\mathbf{I}_{N_P}\\otimes\\mathbf{A}_t\^T(\\boldsymbol{\\Phi})\mathbf{S} \right\|^2. \tag{20} α˘,Θ,Φ,τargmin Y−INP⊗Ar(Θ)GD(τ)INP⊗AtT(Φ)S 2.(20)
其中, S \mathbf{S} S 的第 k k k 列为 S : , k = s 1 , k ⋯ s N P , k T \mathbf{S}_{:,k}=\\mathbf{s}_{1,k}\\ \\cdots\\ \\mathbf{s}_{N_P,k}^T S:,k=s1,k ⋯ sNP,kT。此外, D ( τ ) = diag ( D 1 ( τ ) , ... , D N P ( τ ) ) \mathbf{D}(\boldsymbol{\tau})=\operatorname{diag}(\mathbf{D}1(\boldsymbol{\tau}),\ldots,\mathbf{D}{N_P}(\boldsymbol{\tau})) D(τ)=diag(D1(τ),...,DNP(τ))。要获得 AoA 和 AoD 信息,需要穷举求解 (20) 中的多维优化问题,该问题涉及 5 q 5q 5q 维搜索。因此,本文转向机器学习方法和参数化方法来估计感知参数。更具体地,如果对 (20) 中的 MLE 准则进行网格搜索,其复杂度为
O ( G τ q G θ q G ϕ q G α 2 q ⋅ ( N r N P q 2 N P 3 N t + N r N P 2 N P K P ) ) , O\left(G_{\tau}^{q}G_{\theta}^{q}G_{\phi}^{q}G_{\alpha}^{2q}\cdot \left(N_rN_Pq^2N_P^3N_t+N_rN_P^2N_PK_P\right)\right), O(GτqGθqGϕqGα2q⋅(NrNPq2NP3Nt+NrNP2NPKP)),
其中 G τ G_{\tau} Gτ、 G θ G_{\theta} Gθ、 G ϕ G_{\phi} Gϕ、 G α G_{\alpha} Gα 分别是 ToA、AoA、AoD 和路径增益的网格大小。