目录
[4.1 Clark三相静止→两相静止坐标变换](#4.1 Clark三相静止→两相静止坐标变换)
[4.2 Park两相静止→两相旋转d-q坐标变换](#4.2 Park两相静止→两相旋转d-q坐标变换)
[4.3 转速外环PI控制(输出总q轴电流给定)](#4.3 转速外环PI控制(输出总q轴电流给定))
[4.4 双PI电流内环控制(两套绕组独立PI,核心双PI环节)](#4.4 双PI电流内环控制(两套绕组独立PI,核心双PI环节))
[4.5 Park逆变换(旋转轴转回静止α-β轴)](#4.5 Park逆变换(旋转轴转回静止α-β轴))
[4.6 双三相SVPWM调制](#4.6 双三相SVPWM调制)
[4.7 电机电磁转矩方程](#4.7 电机电磁转矩方程)
✨1.课题概述
双三相永磁同步电机由两套空间相位相差30°的三相定子绕组构成,采用双PI控制器分别对两套绕组的电流独立闭环调节,基于矢量控制将定子电流解耦为励磁d轴、转矩q轴分量,实现磁链与转矩独立控制;两套绕组电流分别经坐标变换、双PI电流环调节后合成驱动电压,经SVPWM调制驱动双三相逆变器,既抑制谐波电流、降低转矩脉动,又通过双PI实现两路电流精准跟踪,提升系统容错与带载能力。
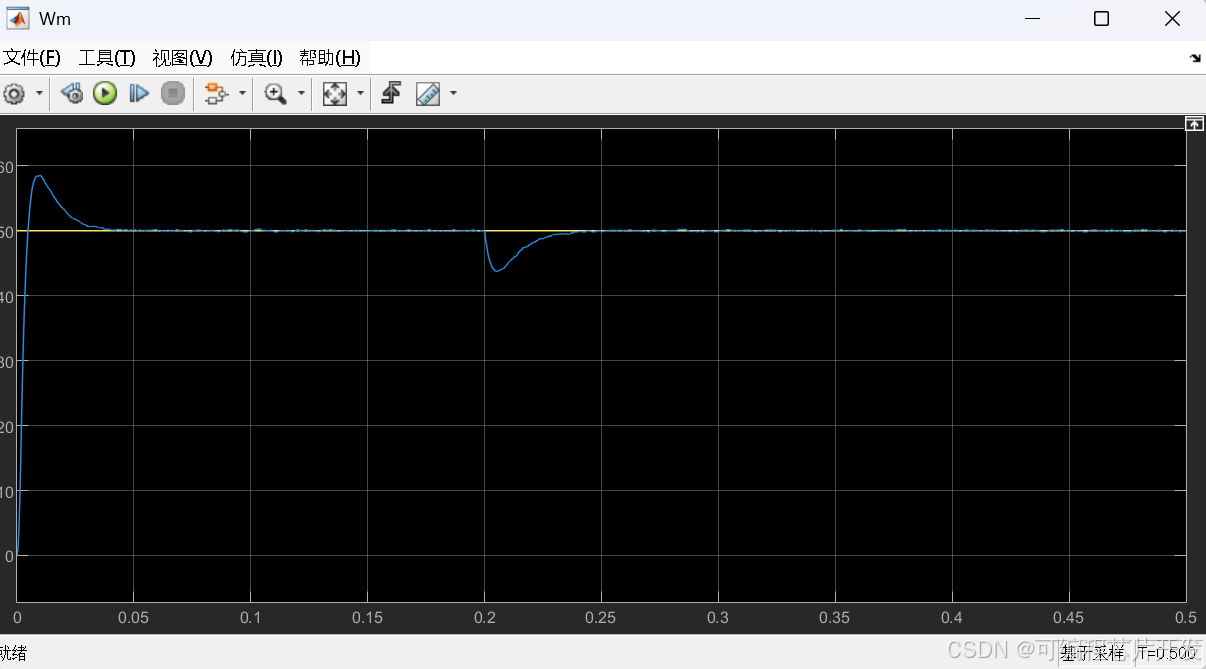
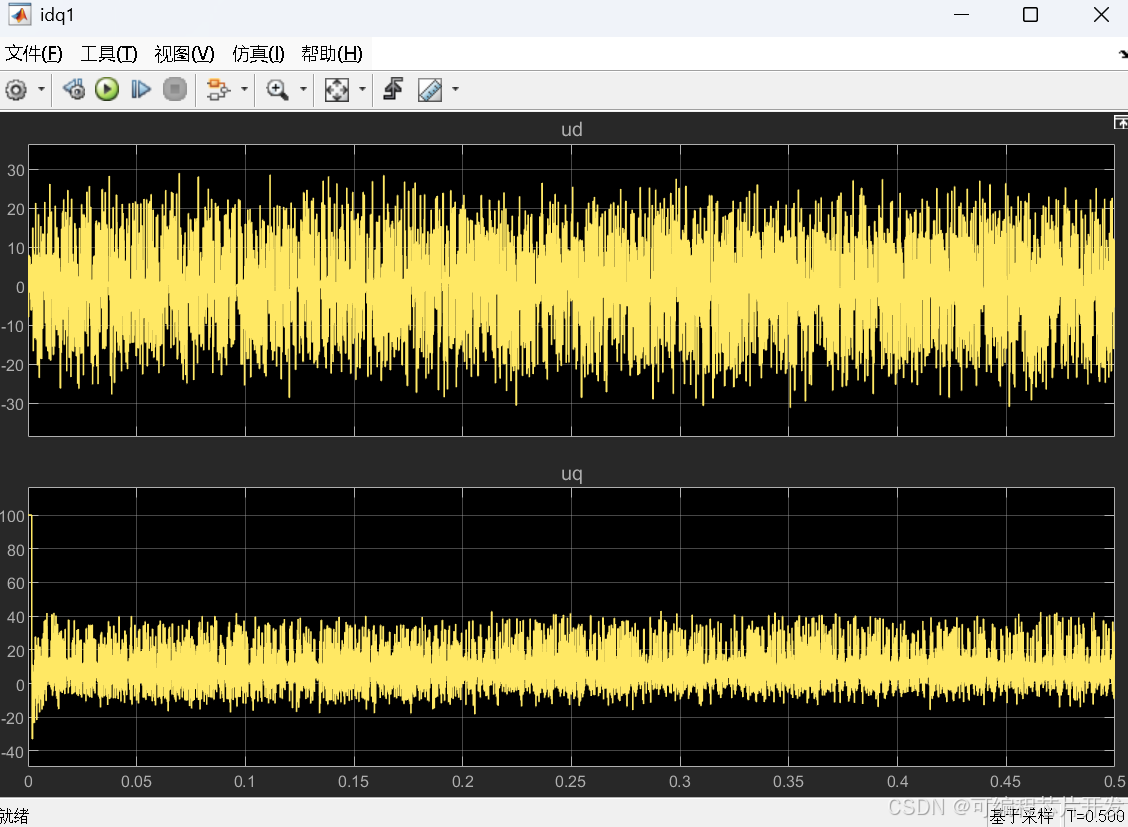
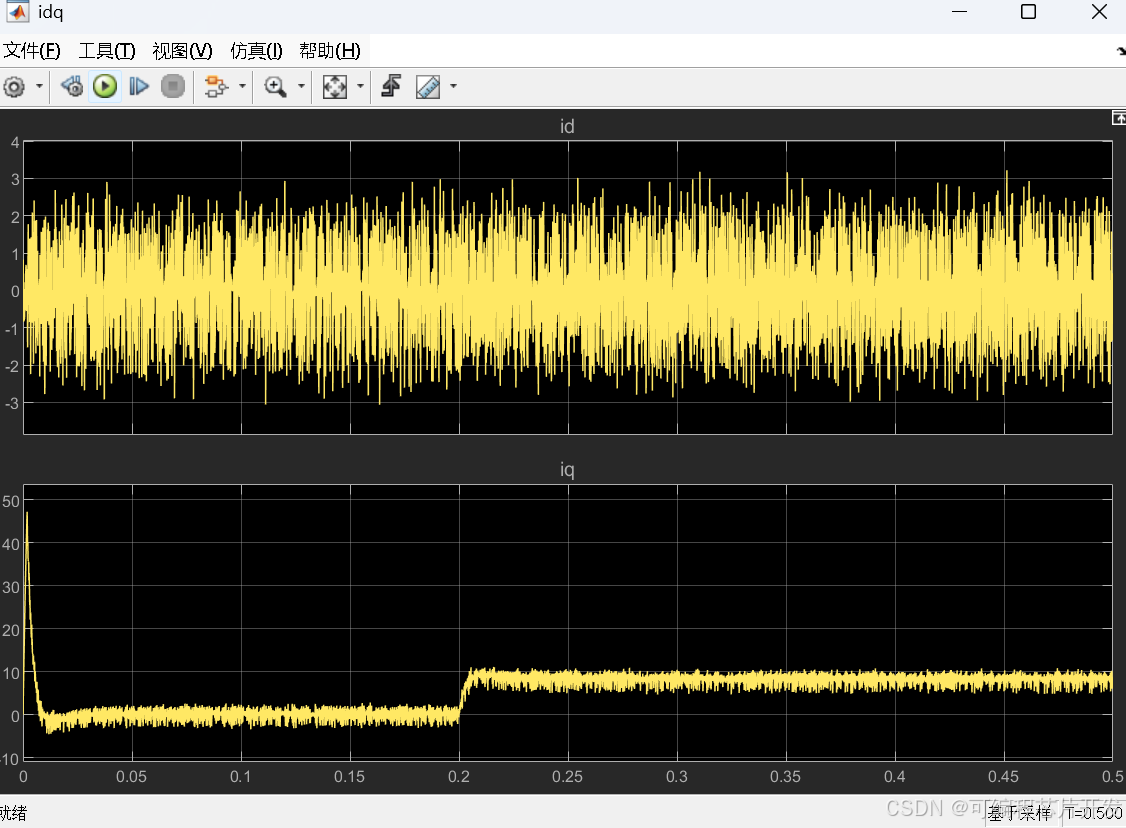
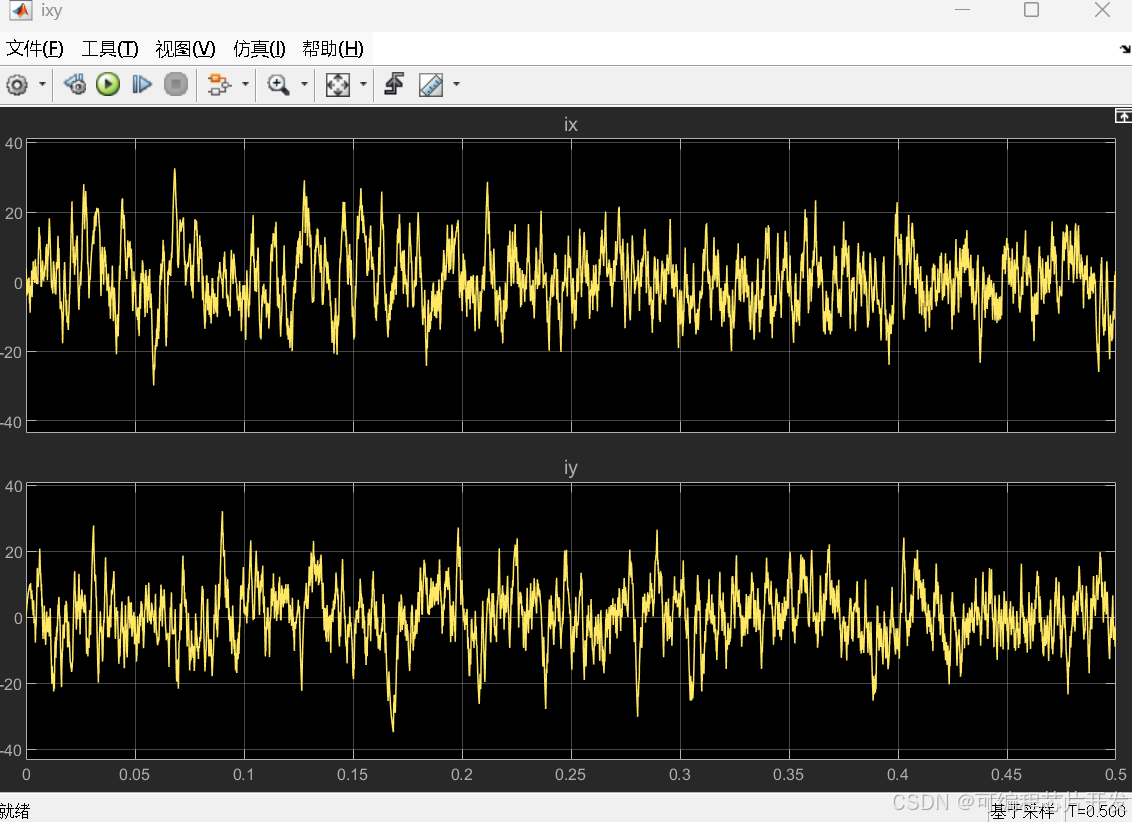
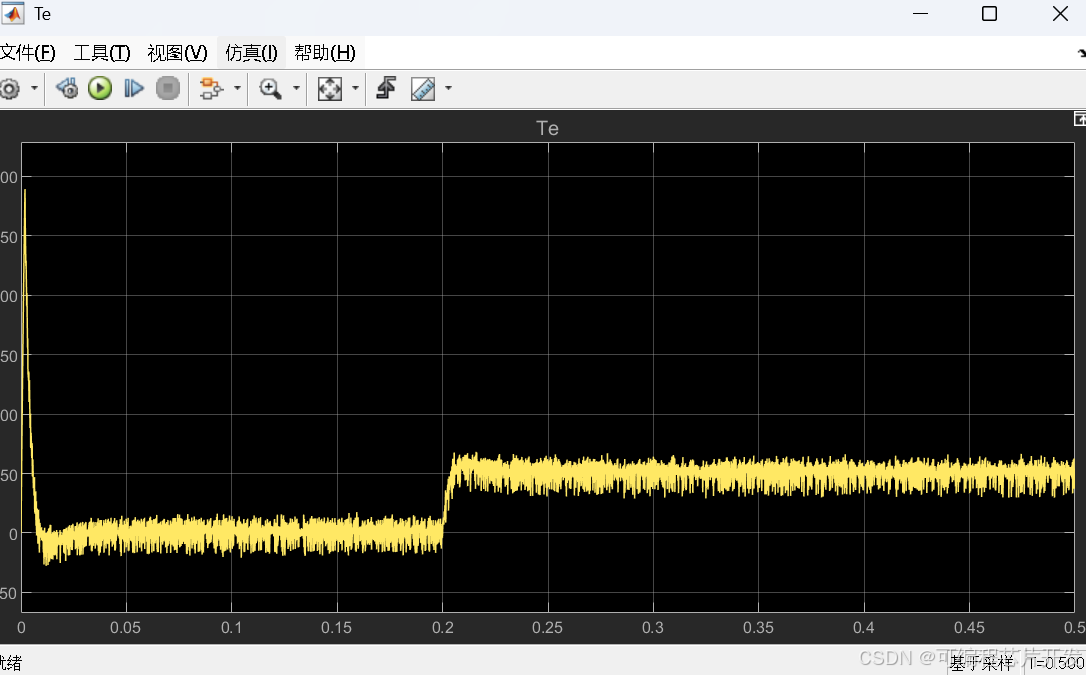
📊2.系统仿真结果
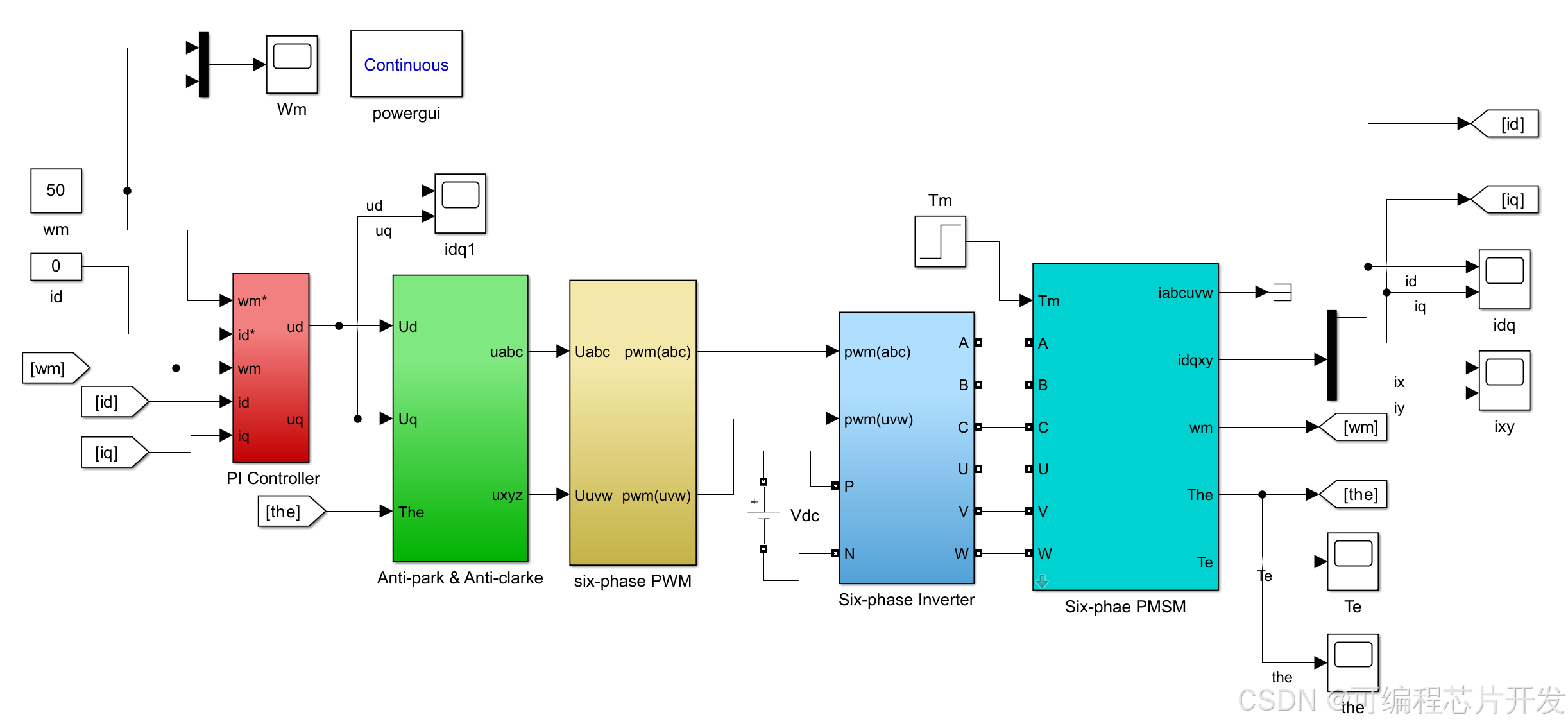
✅3.核心程序或模型
🚀4.系统原理简介
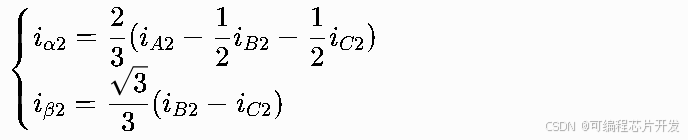
4.1 Clark三相静止→两相静止坐标变换
第一套三相绕组A₁B₁C₁:

第二套三相绕组A₂B₂C₂(绕组偏移30°):
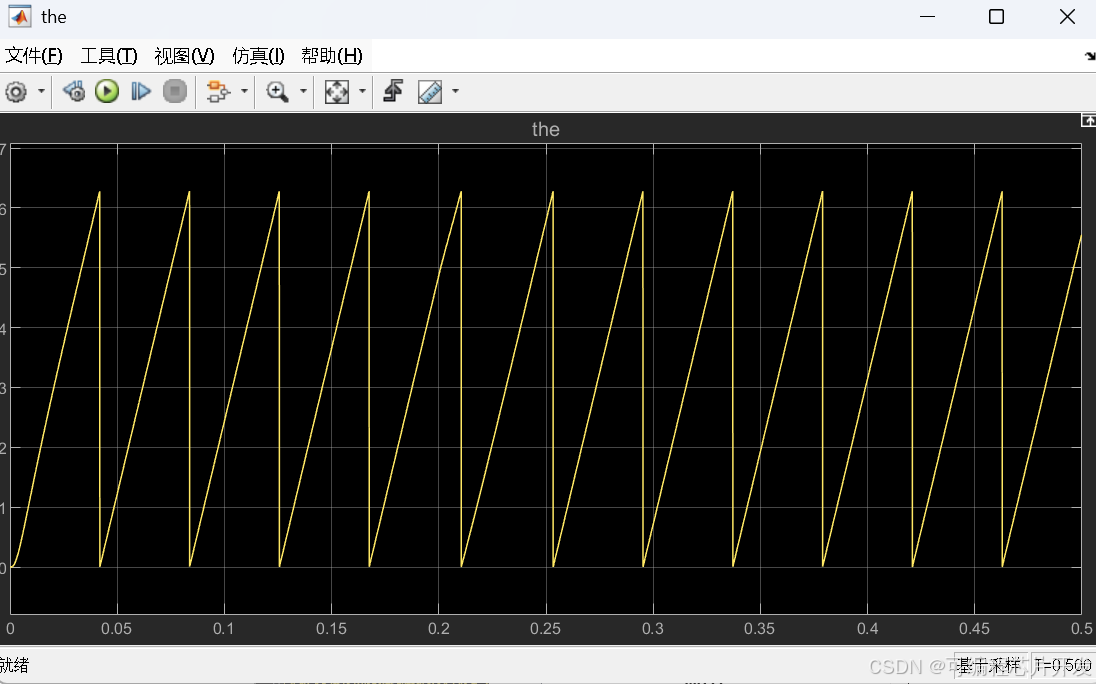
4.2 Park两相静止→两相旋转d-q坐标变换

θ为转子电角度,由位置传感器获取。
4.3 转速外环PI控制(输出总q轴电流给定)
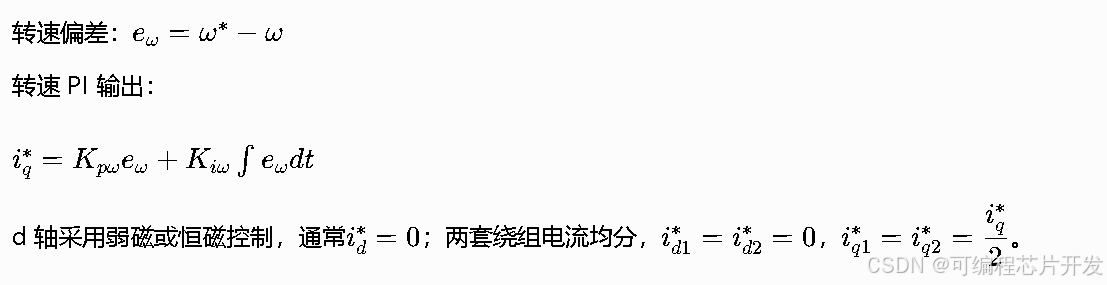
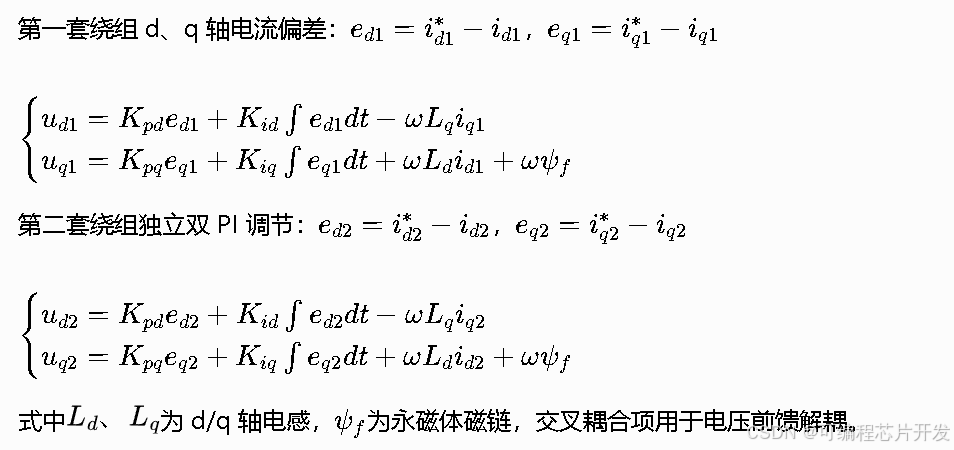
4.4 双PI电流内环控制(两套绕组独立PI,核心双PI环节)
4.5 Park逆变换(旋转轴转回静止α-β轴)

4.6 双三相SVPWM调制
分别对两套绕组α−β电压矢量进行空间电压矢量调制,计算各扇区作用时间,生成六路PWM驱动信号控制两套三相逆变器输出电压,施加于双三相定子绕组。
4.7 电机电磁转矩方程

p为电机极对数,转矩由两套绕组电流共同生成,双PI保证两路电流均衡分配。
系统采用单转速PI外环 + 双路独立电流PI内环架构,两套绕组各自完成坐标变换与电流闭环,双 PI分别抑制两路电流静差、扰动,实现两路功率均分;通过矢量解耦实现转矩、励磁独立调控,双三相结构结合双PI控制有效抑制5、7次谐波,降低转矩脉动,具备绕组故障下容错运行能力。
💢5.完整工程文件
v v
关注后,GZH回复关键词:a51