HCNR200 4-20mA隔离采样电路设计:线性光耦特性、公式推导与工程校准
-
- 一、为什么4-20mA隔离采样电路需要特别关注?
- 二、4-20mA隔离采样电路理论分析
-
- [1. 电路拓扑与信号路径](#1. 电路拓扑与信号路径)
- [2. 公式推导:从ILOOP到VOUT的完整关系](#2. 公式推导:从ILOOP到VOUT的完整关系)
- 三、工程实践:如何解决K3离散性问题?
-
- [1. 校准方法选择](#1. 校准方法选择)
- [2. 软件校准实现方案(推荐)](#2. 软件校准实现方案(推荐))
- [3. 校准点选择建议](#3. 校准点选择建议)
- 四、电路优化设计要点
-
- [1. 电阻匹配精度](#1. 电阻匹配精度)
- [2. 温度补偿](#2. 温度补偿)
- [3. 电源稳定性](#3. 电源稳定性)
- [4. 电路布局注意事项](#4. 电路布局注意事项)
- 五、典型应用场景与设计案例
-
- [1. 工业过程控制系统](#1. 工业过程控制系统)
- [2. 智能传感器节点](#2. 智能传感器节点)
- 六、常见问题解答
-
- [Q1: 为什么不能直接使用线性光耦而需要校准?](#Q1: 为什么不能直接使用线性光耦而需要校准?)
- [Q2: 校准后还需要定期重新校准吗?](#Q2: 校准后还需要定期重新校准吗?)
- [Q3: K3值随温度如何变化?](#Q3: K3值随温度如何变化?)
- 七、总结
在工业自动化、过程控制和远程监测系统中,4-20mA电流环作为标准模拟信号传输方式,因其抗干扰能力强、传输距离远、易于隔离等优点被广泛应用。然而,当工程师设计4-20mA隔离采样电路时,常会遇到精度不达标、信号不稳定等问题。本文将深入剖析4-20mA隔离采样电路的原理、公式推导及工程实现细节,帮助你解决实际设计中的痛点。
一、为什么4-20mA隔离采样电路需要特别关注?
在工业现场环境中,4-20mA信号需要穿越不同电位的系统,电气隔离是必需的。线性光耦(如HCNR200/201)是实现4-20mA隔离采样的主流方案,但线性光耦的非理想特性常常导致设计失败:
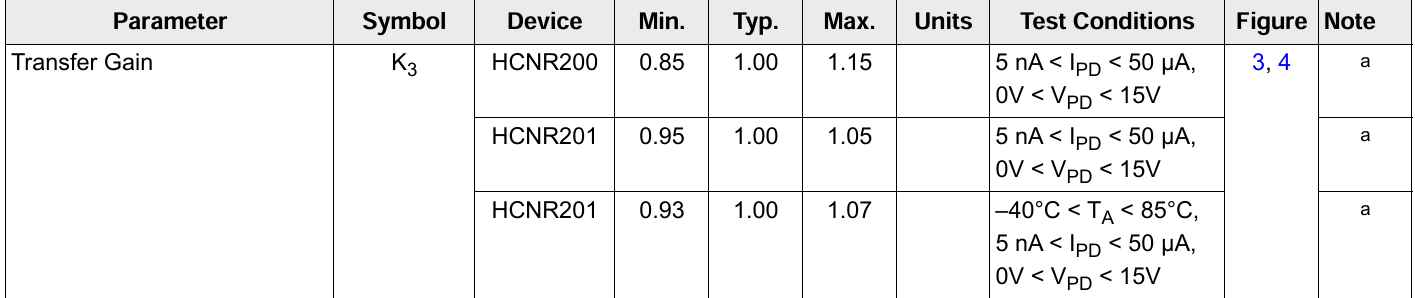
⚠️ 核心问题 :线性光耦的传输增益K3 存在显著离散性------典型值范围在 0.85~1.15 之间(±15%误差)!
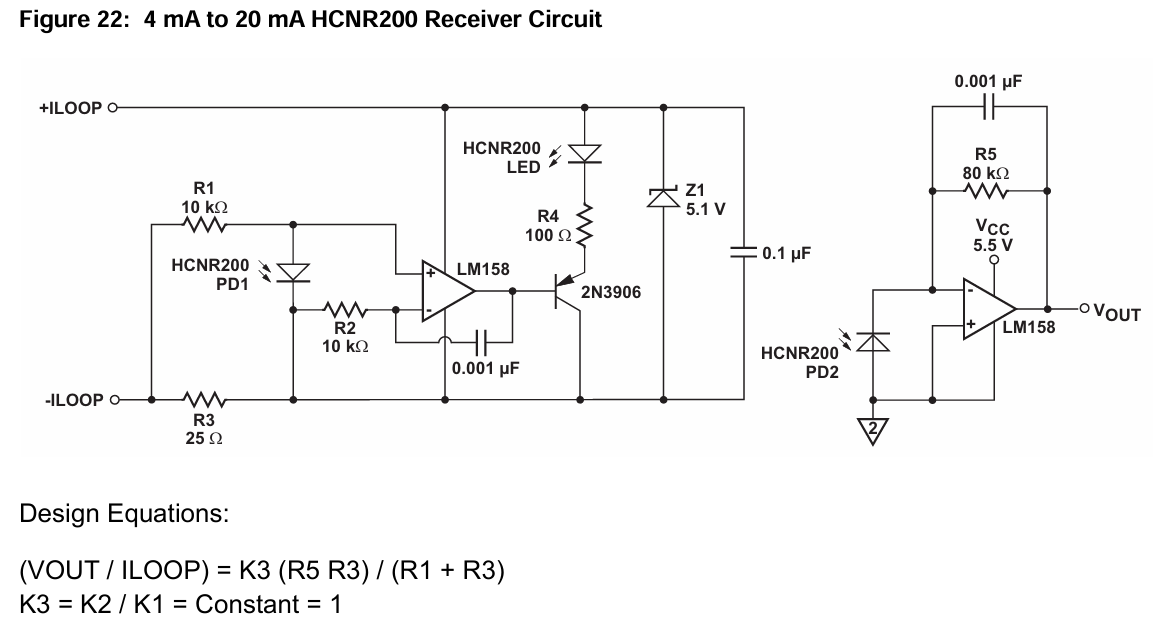
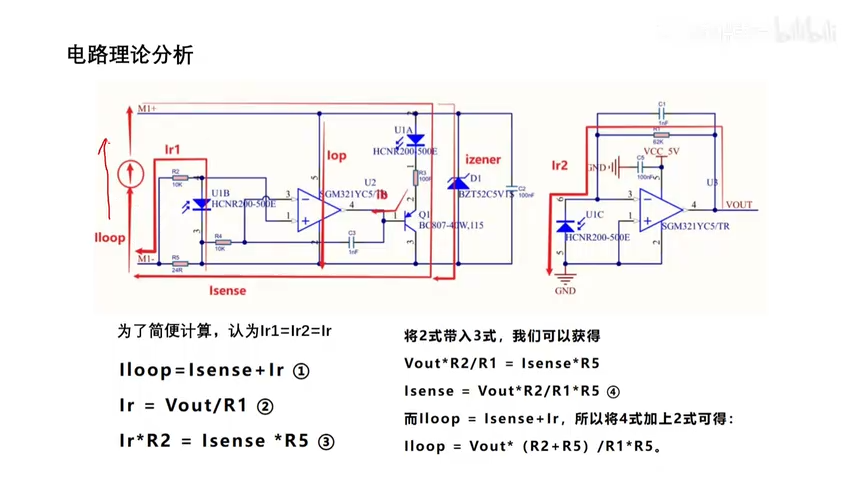
表:HCNR200/201的K3参数规格(来源:HCNR200手册)
从上表可见,即使是同一型号的线性光耦,K3值也可能在0.85~1.15之间波动。这意味着:
- 未经校准的电路可能产生高达±15%的测量误差
- 不同批次器件的测量结果不一致
- 温度变化和老化会导致K3进一步漂移
💡 工程启示 :任何基于线性光耦的4-20mA采样电路,必须设计校准环节!否则无法满足工业级精度要求(通常要求±0.5%或更高)。
二、4-20mA隔离采样电路理论分析
1. 电路拓扑与信号路径
4-20mA电流源(ILOOP)流入电路后,电流分为多条路径:
- Isense路径:通过R3(采样电阻)产生压降
- IR1路径:流经线性光耦接收端PD1
- IOP路径:供给运算放大器
- IB路径:作为三极管Q1的基极电流
关键假设 :线性光耦内部两个接收管(PD1/PD2)一致性良好,即光照强度相同,因此有 IR1 = IR2
2. 公式推导:从ILOOP到VOUT的完整关系
我们通过基尔霍夫电流定律进行理论推导:
步骤1:建立基本方程
-
环路电流方程 :
I L O O P = I s e n s e + I R 1 I_{LOOP} = I_{sense} + I_{R1} ILOOP=Isense+IR1 (式1)
-
隔离侧输出关系 :
I R 2 = V O U T R 1 I_{R2} = \frac{V_{OUT}}{R_1} IR2=R1VOUT
由于 I R 1 = I R 2 I_{R1} = I_{R2} IR1=IR2,故 I R 1 = V O U T R 1 I_{R1} = \frac{V_{OUT}}{R_1} IR1=R1VOUT (式2)
-
测量侧平衡方程 :
I R 1 × R 2 = I s e n s e × R 5 I_{R1} \times R_2 = I_{sense} \times R_5 IR1×R2=Isense×R5 (式3)
步骤2:联立方程求解
将式2代入式3:
V O U T R 1 × R 2 = I s e n s e × R 5 \frac{V_{OUT}}{R_1} \times R_2 = I_{sense} \times R_5 R1VOUT×R2=Isense×R5
⇒ I s e n s e = V O U T × R 2 R 1 × R 5 \Rightarrow I_{sense} = \frac{V_{OUT} \times R_2}{R_1 \times R_5} ⇒Isense=R1×R5VOUT×R2 (式4)
将式2和式4代入式1:
I L O O P = V O U T × R 2 R 1 × R 5 + V O U T R 1 I_{LOOP} = \frac{V_{OUT} \times R_2}{R_1 \times R_5} + \frac{V_{OUT}}{R_1} ILOOP=R1×R5VOUT×R2+R1VOUT
= V O U T × ( R 2 + R 5 R 1 × R 5 ) = V_{OUT} \times \left( \frac{R_2 + R_5}{R_1 \times R_5} \right) =VOUT×(R1×R5R2+R5)
最终得到:
V O U T = I L O O P × R 1 × R 5 R 2 + R 5 \boxed{V_{OUT} = I_{LOOP} \times \frac{R_1 \times R_5}{R_2 + R_5}} VOUT=ILOOP×R2+R5R1×R5 (式5)
步骤3:引入K3参数
从线性光耦手册可知:
V O U T I L O O P = K 3 × R 5 × R 3 R 1 + R 3 \frac{V_{OUT}}{I_{LOOP}} = K_3 \times \frac{R_5 \times R_3}{R_1 + R_3} ILOOPVOUT=K3×R1+R3R5×R3
令 K 3 = R 2 R 1 K_3 = \frac{R_2}{R_1} K3=R1R2,则上式简化为:
V O U T I L O O P = K 3 × R 5 × R 3 R 1 + R 3 \frac{V_{OUT}}{I_{LOOP}} = K_3 \times \frac{R_5 \times R_3}{R_1 + R_3} ILOOPVOUT=K3×R1+R3R5×R3
这与我们推导的式5一致,验证了电路设计的正确性。
📌 重要提示 :K3的离散性(0.85~1.15)意味着即使电路设计完美,实际增益也会有±15%的波动,必须通过校准消除。
三、工程实践:如何解决K3离散性问题?
1. 校准方法选择
| 校准方法 | 实现难度 | 适用场景 | 精度 | 备注 |
|---|---|---|---|---|
| 软件校准 | 低 | 批量生产 | ±0.1% | 需要已知标准源 |
| 硬件电位器校准 | 中 | 小批量生产 | ±0.2% | 需要手动调整 |
| 自动校准电路 | 高 | 高精度设备 | ±0.05% | 成本较高 |
2. 软件校准实现方案(推荐)
c
// 4-20mA采样校准算法示例
#define CALIBRATION_POINTS 2
float calibration_current[CALIBRATION_POINTS] = {4.0, 20.0}; // 校准点:4mA和20mA
float calibration_adc[CALIBRATION_POINTS] = {0}; // 存储ADC采样值
float k, b; // 增益系数和偏移量
// 执行校准过程
void perform_calibration() {
for(int i=0; i<CALIBRATION_POINTS; i++) {
// 1. 施加已知电流(4mA或20mA)
apply_current(calibration_current[i]);
// 2. 读取ADC值
calibration_adc[i] = read_adc();
}
// 3. 计算校准系数
k = (calibration_adc[1] - calibration_adc[0]) / (20.0 - 4.0);
b = calibration_adc[0] - k * 4.0;
}
// 采样函数
float get_current() {
float adc_value = read_adc();
return (adc_value - b) / k;
}3. 校准点选择建议
- 至少选择2个校准点(4mA和20mA)
- 理想情况下选择3个点(4mA、12mA、20mA),可校正非线性
- 校准环境:应在标准温度(25°C)下进行,避免温度漂移影响
四、电路优化设计要点
1. 电阻匹配精度
- R1和R2:建议使用0.1%精度的金属膜电阻
- R5和R3:根据需要选择0.1%~1%精度
- 注意:R1和R2的匹配度直接影响K3的稳定性
2. 温度补偿
-
选择温度系数低的电阻(如<25ppm/°C)
-
考虑温度补偿算法 :在软件中加入温度补偿项
I_corrected = I_measured * (1 + α * (T - T0))其中α为温度系数,T为当前温度,T0为校准温度
3. 电源稳定性
- VCC必须稳定:波动应<0.1%
- 增加LC滤波:在电源输入端增加LC滤波网络
- 使用基准电压源:对关键参考电压使用精密基准源(如TL431)
4. 电路布局注意事项
- 光耦两侧必须严格隔离:使用隔离槽、隔离地
- 模拟信号走线远离数字信号:避免串扰
- 关键节点增加去耦电容:0.1μF陶瓷电容+10μF电解电容组合
五、典型应用场景与设计案例
1. 工业过程控制系统
- 需求:±0.1%精度,0~100°C工作温度范围
- 方案 :
- HCNR201线性光耦(K3=0.95~1.05)
- 0.1%精度电阻
- 三点校准(4mA/12mA/20mA)
- 温度补偿算法
2. 智能传感器节点
- 需求:低功耗,±0.5%精度
- 方案 :
- HCNR200线性光耦(K3=0.85~1.15)
- 1%精度电阻
- 两点校准(4mA/20mA)
- 无温度补偿(在稳定环境中工作)
六、常见问题解答
Q1: 为什么不能直接使用线性光耦而需要校准?
A: 线性光耦的K3值存在±15%的离散性,这是由制造工艺决定的。即使同一型号的器件,K3值也会因批次、温度、老化等因素变化。未经校准的电路无法满足工业级精度要求。
Q2: 校准后还需要定期重新校准吗?
A: 是的。建议:
- 出厂前校准
- 每年现场校准一次(关键系统)
- 每次设备大修后校准
- 温度变化剧烈后校准
Q3: K3值随温度如何变化?
A: 典型线性光耦的K3温度系数约为-0.02%/°C。例如,HCNR200在-40°C~+85°C范围内,K3值变化可达±5%。这也是为什么温度补偿对高精度系统至关重要。
七、总结
| 关键点 | 说明 | 工程建议 |
|---|---|---|
| K3离散性 | 0.85~1.15(±15%) | 必须校准,否则精度无法达标 |
| 校准方法 | 软件/硬件校准 | 推荐软件两点校准,关键系统三点校准 |
| 电阻选择 | 匹配精度影响K3稳定性 | 关键电阻选0.1%精度,注意温度系数 |
| 温度影响 | K3温度系数约-0.02%/°C | 高精度系统需温度补偿算法 |
| 电路布局 | 隔离与布线影响性能 | 光耦两侧严格隔离,模拟信号远离数字信号 |
4-20mA隔离采样电路的设计精髓在于:理解线性光耦的非理想特性,通过合理的校准策略消除K3的离散性影响。 只有将理论分析与工程实践紧密结合,才能设计出稳定可靠的工业级采集系统。
希望本文对您的项目有所帮助!如果您在实际设计中遇到具体问题,欢迎在评论区留言讨论。