CVPR 2026 · TASK-AWARE CONTRASTIVE LEARNING
CVPR 2026 | TACO:定位和检测,终于可以相互"教"了
一个 LiDAR 网络,同时做定位 和3D 检测。TACO 的关键不是简单共享 backbone,而是让静态地理结构和可移动目标在对比学习中各司其职、互相补强。
🟧 Detection🟩 Localization🔁 Mutual TeachOxfoLD
📌 论文信息
题目: TACO: Task-Aware Contrastive Learning for Joint LiDAR Localization and 3D Object Detection | TACO:面向 LiDAR 定位与 3D 目标检测联合学习的任务感知对比学习
作者: Leyuan Xing*,Huanjia Zhang*, Dongyu Pan, Hai Wu, Qiming Xia, Kezheng Xiong, Wen Li,Chenglu Wen†,Cheng Wang†
* 共同第一作者† 通讯作者
单位: 厦门大学;鹏城实验室;布里斯托大学
发表: CVPR 2026
代码:
https://github.com/xmuxly/OxfoLD
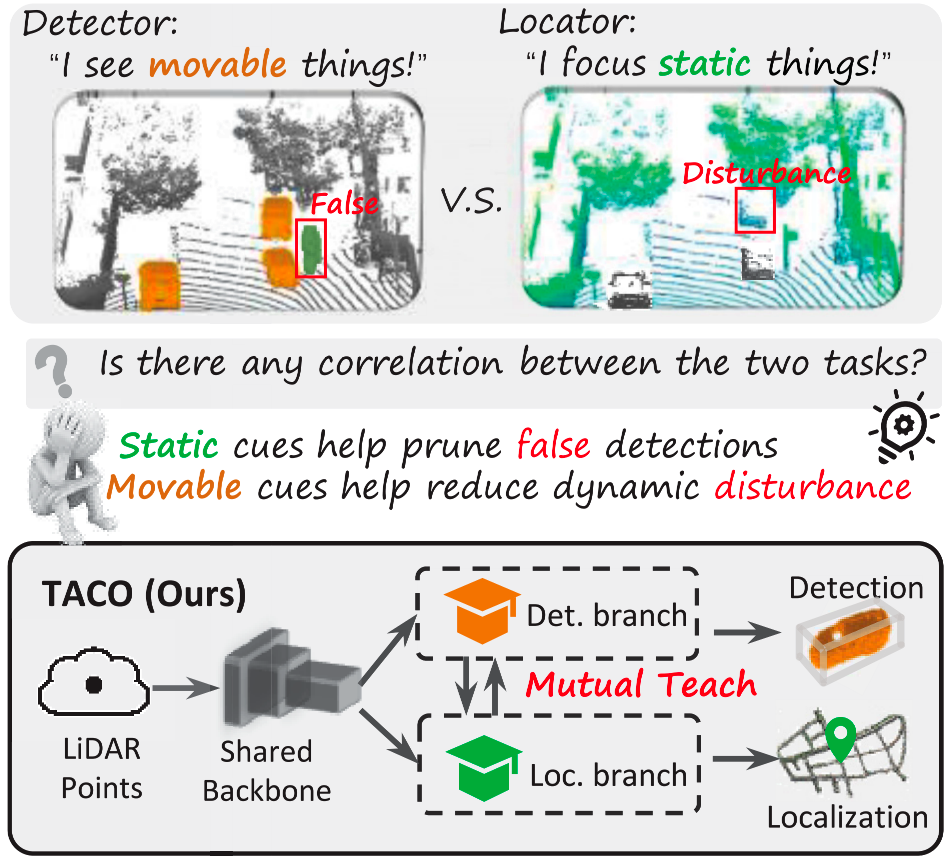
TACO的任务交互图如下所示。
导读:定位和检测不能各自为政的原因是什么?
自动驾驶系统中,定位 决定汽车的位置3D 检测考察一下周围的情况。传统的方法就是把两个任务分开来完成,分别设计网络、分别优化指标。
但是两者之间还是有一定的联系的:定位要靠道路、建筑物以及路肩等静态结构 ;检测要重视车辆、行人、骑车人等动态目标TACO要解决的问题就是:怎样让两个任务可以共享信息而互不干扰呢?
一句话就可以看懂TACO
TACO是一个统一的LiDAR多任务框架,即使用任务感知对比学习区分静态地理特征和可移动目标特征定位准确,检测结果可靠。
核心的问题就是两个任务的关注点是不一样的
检测器: 主要针对的是车辆、行人、骑行者等可以移动的目标,要具有局部、细粒度、以目标为中心的特征。
定位器: 更加依靠道路、建筑、路缘等长久不变的基础设施,对地理环境的要求比较高,要有一个稳定的、可以反复利用的地理环境。
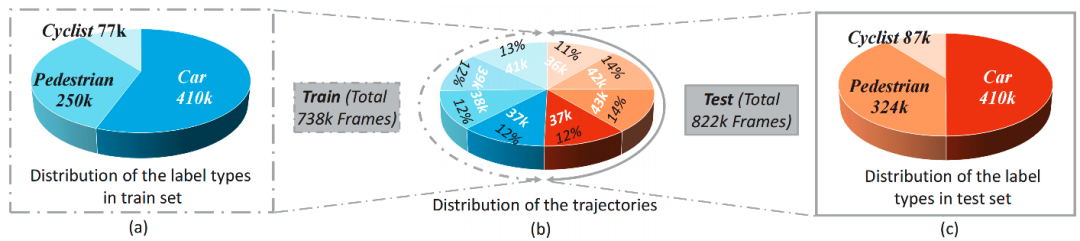
图 2 TACO 框架由共享特征提取以及任务感知对比学习组成。
⚙️ 方法设计:三个对比学习模块
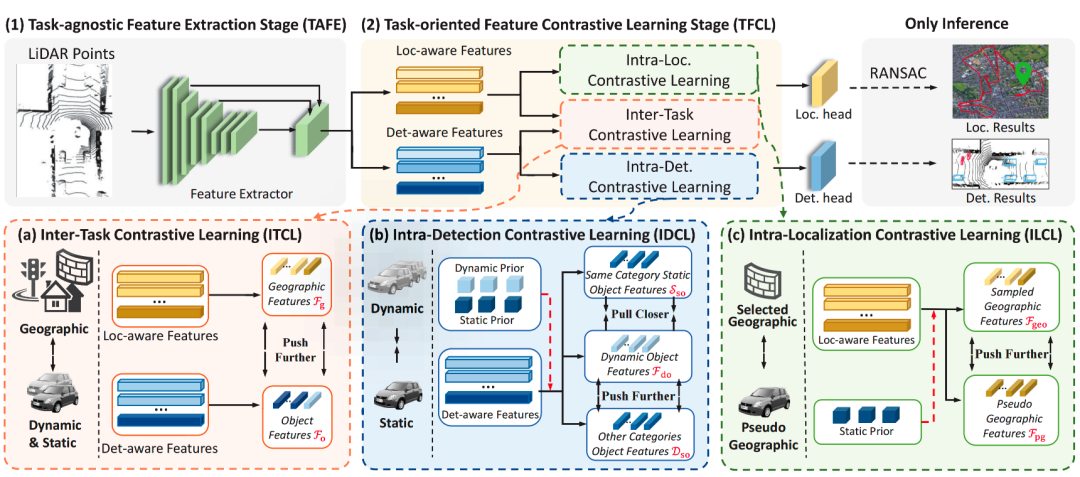
01 ITCL:任务间的对比学习
拉开静态地理特征与可移动目标特征减少定位与检测之间特征冲突的情况。
02 IDCL:进行内部对比学习检测
拉近同类型别的动态和静态的目标特性拉大各个类别目标特征之间的差距来提高检测判别的能力。
03 ILCL:进行内部对比学习
抑制静止车辆等"伪地理特征"干扰可以使得定位更加重视实际存在的地理地貌。
📦 OxfoLD:为联合任务补充数据缺口
论文同时提出OxfoLD数据集。它是从 Oxford RobotCar 发展出来的,并且增加了逐帧 3D 框标注的功能来实现同时支持LiDAR 定位和3D 目标检测。
目前的定位数据集没有3D目标框,而检测数据集又缺少多次重复采集的轨迹。OxfoLD 的价值就是把这两种需求放在同一个标准下进行比较。
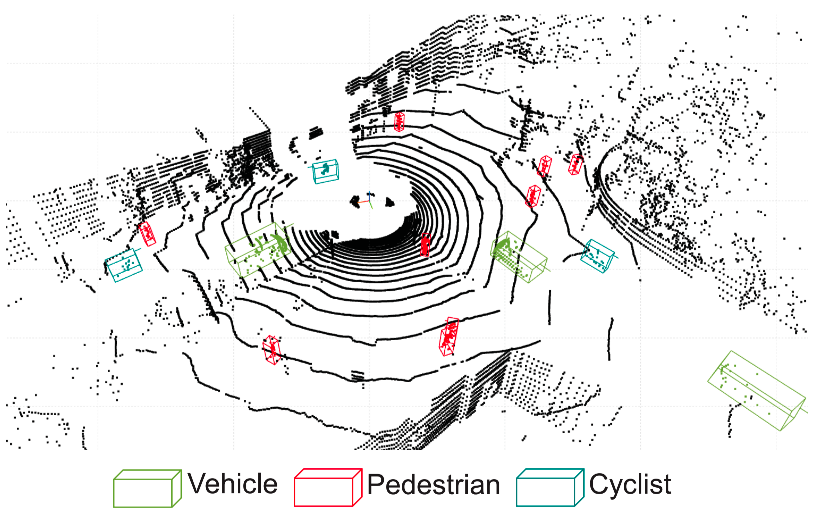
图 3 OxfoLD 会提供多条遍历路径以及 3D 目标标注。
📊 实验的结果是:定位更加准确,检测也更加稳定
在OxfoLD上,TACO达到了0.72m 平均位置误差和0.85° 平均方向误差比LiSA小24.21%和25.44%。
在3D检测任务上,TACO在Vehicle上达到了81.60%的AP@0.5同时在Pedestrian和Cyclist上也有一定的竞争力。
**关键结论:**真正有效的联合学习,并不是简单的共享backbone,而应该使模型知道哪些特征是该服务所定位的,哪些特征应该被该服务所检测。
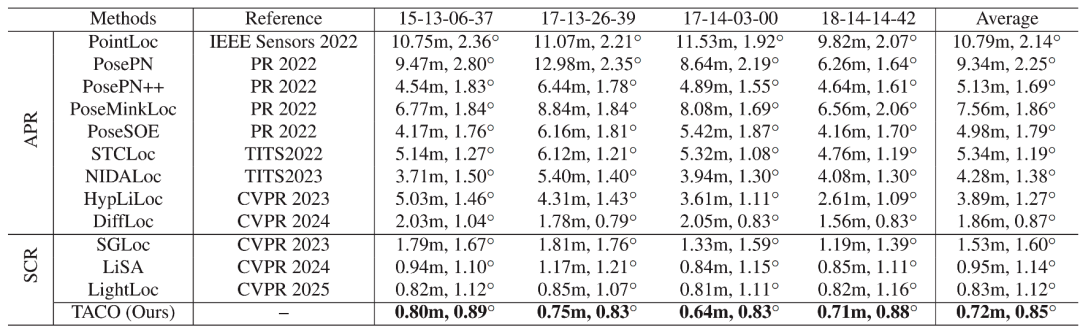
图4 TACO在定位和检测任务上都表现不错。
✨ 主要贡献
第一点贡献就是提出一个统一联合框架TACO
把 LiDAR 定位和 3D 目标检测放在一起,在同一个任务感知对比学习框架里进行联合优化。
贡献二:设计三个对比学习模块
通过ITCL、IDCL、ILCL分别解决任务之间的冲突、发现内部差异以及识别出假地理干扰。
贡献三:创建OxfoLD数据集
提供多次遍历 LiDAR 定位序列以及大量的 3D 目标框标注来支持联合定位与检测评价。
💡 简单点评
TACO 不仅把两个任务放在一起训练一个网络,而且是从任务特性出发来确定如何处理"静态结构"和"可移动目标"两者之间既有矛盾又有互补的地方。
这对自动驾驶多任务感知有很好的启示:未来的重点不一定是共享参数,而是要让任务之间建立起更加明确的语义边界以及交互关系。
📝 总结
TACO面向LiDAR 定位和3D 目标检测两个主要的任务就是提出一个统一的任务感知对比学习框架。
它通过显式解耦静态地理特征和可移动目标特征两个任务可以共享信息,但是不能互相干扰。
同时,OxfoLD数据集也为联合 LiDAR 定位和 3D 检测提供了一个新的实验平台,值得自动驾驶多任务感知的研究人员去注意。
往期推荐