目录
1.摘要
海上网络承载贸易与资源输送,却易受灾害、事故、恶劣天气和航路中断影响。传统保障多依赖经验布设与固定路线,难以应对动态需求。本文提出一个乐观双层规划框架:上层决定保障中心与无人系统配置以控制长期成本,下层决定 USV-UAV 协同路径以缩短任务完成时间。算法采用两阶段思路,先用嵌套下层模型的遗传算法处理上层,再用受约束 k-means 与混合 PSO-GA 启发式求解路径。
2.问题描述与模型
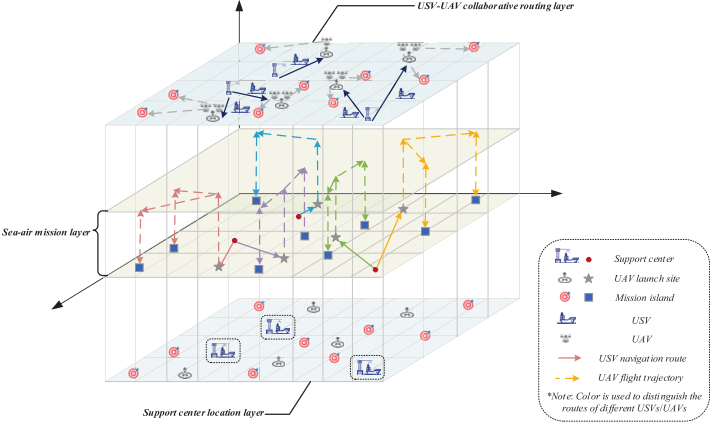
海上保障网络定义在无向图 G = ( V , A , S ) G=(V,A,S) G=(V,A,S) 上。 V = C ∪ V V=C\cup \mathcal V V=C∪V,其中 C C C 为需保障岛礁或设施, V \mathcal V V 为中继/候选节点; A A A 为可航行弧;任务集合 M = { ( j , d , f ) } M=\{(j,d,f)\} M={(j,d,f)} 表示 USV j j j 从中心 d d d 出发,到达 UAV 发射点 f f f,再由 UAV 服务需求点。目标是在有限中心、USV 和 UAV 资源下,确定中心位置、UAV 发射点、USV 闭环路径与 UAV 服务分配。
不确定性主要来自需求等级、风阻、航路降速和航路阻塞。需求等级影响资源量,风阻影响 UAV 速度与续航,航路状态影响 USV 航行距离和时间。
模型采用乐观双层规划。上层领导者决定中心数量与位置、USV/UAV 数量和发射点,目标是长期总成本最小;下层跟随者在上层配置下决定 USV-UAV 路径,目标是任务完成时间最小。若下层存在多个最优解,则选对上层最有利的解。
决策变量规模为:
2 ∣ V ∣ + ∣ F ∣ ∣ C ∣ + ∣ F ∣ 2 ∣ T ∣ + ∣ D ∣ + ∣ D ∣ ∣ T ∣ + 4 + 3 ∣ F ∣ + ∣ F ∣ 2 2|V|+|F||C|+|F|^2|T|+|D|+|D||T|+4+3|F|+|F|^2 2∣V∣+∣F∣∣C∣+∣F∣2∣T∣+∣D∣+∣D∣∣T∣+4+3∣F∣+∣F∣2
其中, F F F 为允许 UAV 起降的节点集, D D D 为候选中心, T T T 为 USV 集合。
上层相当于设施选址与资源配置,下层相当于协同路径规划。双层结构把长期投资与短期执行分离,同时允许下层最优路径反馈到上层成本评价中,因而比单层加权目标更贴近实际决策。
3.求解方法
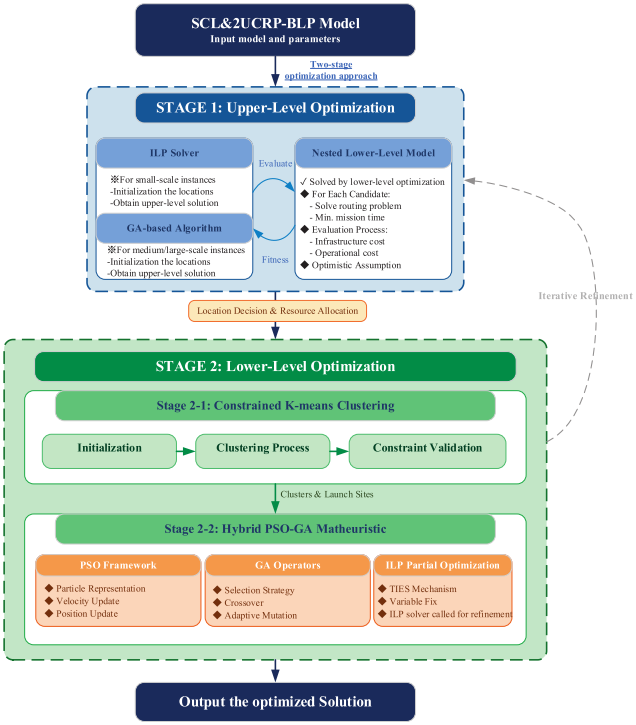
由于模型变量多、组合性强,直接用 ILP 求解随规模迅速失效。采用两阶段框架:第一阶段用嵌套下层模型的 GA 搜索上层配置;第二阶段先用受约束 k-means 确定 UAV 发射点与服务簇,再用混合 PSO-GA 数学启发式优化 USV-UAV 路径,并周期性调用 ILP 做局部精修。
第一阶段:嵌套下层模型 GA
每个染色体表示保障中心位置和无人系统配置。GA 通过选择、交叉、变异生成上层候选解;每个候选解都调用下层路径优化计算运行成本,再以总系统成本作为适应度。已评估方案缓存,避免重复求解。
第二阶段:受约束 k-means
普通 k-means 只考虑空间距离,本文加入 UAV 续航、载荷和 USV 搭载能力。初始簇数按容量下界给出:
k m i n = ⌈ ∑ c ∈ C q c C U S V C U A V ⌉ k_{min}=\left\lceil\frac{\sum_{c\in C}q_c}{C_{USV}C_{UAV}}\right\rceil kmin=⌈CUSVCUAV∑c∈Cqc⌉
若某簇超出 UAV 航程、载荷或 USV 搭载约束,则增加簇数并重聚类,直到可行。
第二阶段:混合 PSO-GA 启发式
算法用 PSO 做全局路径搜索,用 GA 保持多样性,用 ILP 精修关键路径片段。粒子位置表示 UAV 发射点访问序列,适应度为下层任务时间及可行性。
TIES 机制 从当前 USV 路径中选择关键发射点及其时间邻域,固定其余 y f f ′ j y_{ff'j} yff′j 变量,仅对局部子问题调用 ILP。若改进成功,则把新解放回 PSO-GA 群体继续搜索。
4.结果展示
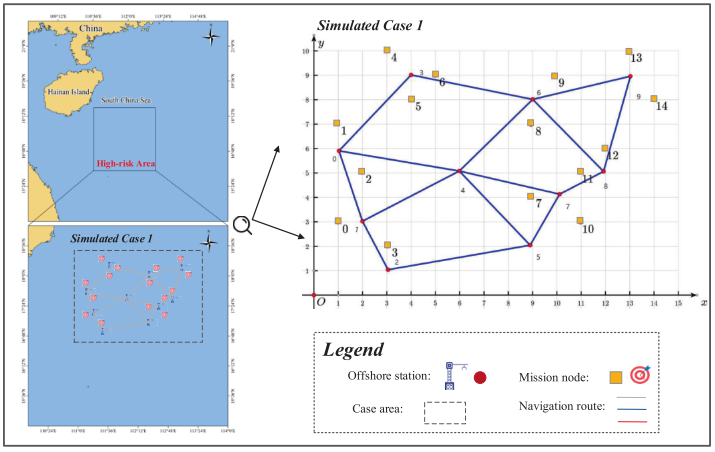
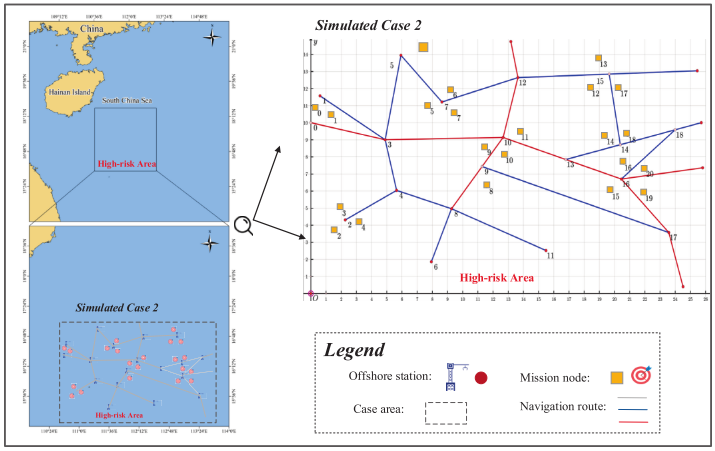
案例来自南海某海上钻井平台区域,论文设置两个场景:场景 1 为航路成熟、节点连通较好的海区;场景 2 为远海复杂区域,航路风险、需求和风阻更强。
双层建模效果
将 BLP 与顺序优化、单层加权优化和层次分解比较。BLP 在所有场景下成本最低,优势在高不确定和大规模实例中更明显。顺序优化最快但忽视路径反馈,成本偏高;单层加权理论上完整但计算过重,常到达时间上限;层次分解有一定效果,但缺少显式反馈,稳定性较弱。
结论
成熟海区宜采用多中心分布式布局,以换取覆盖弹性;远海复杂区域宜把中心集中布设在可靠航路附近,以降低级联失效风险。需求不确定主要通过 UAV 容量与分配吸收,风阻不确定可通过聚类和冗余容量缓冲,航路不确定影响最大,应配置动态重构方案。
5.参考文献
Cui X, Wang S, Li B, et al. Joint optimization of support center location and USV-UAV collaborative routing for maritime network under uncertainty: a bilevel programming modelJ. Computers & Industrial Engineering, 2026: 111845.
6.算法辅导·应用定制·读者交流
xx