1、问题背景
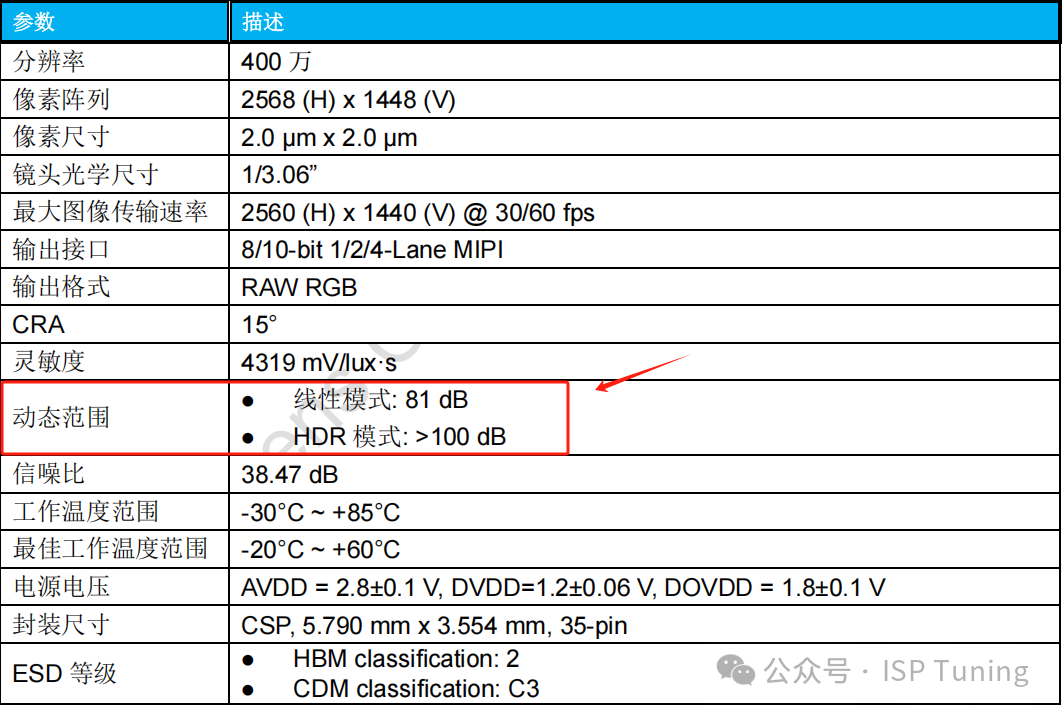
Sensor 支持两种模式输出,SDR模式(Standard Dynamic Range)也指通常所说的 linear模式,和HDR模式(High Dynamic Range),
在项目调试的前期,我们一般都需要和客户确认,是要调试哪个模式,还是两个模式都要调,因为这涉及到工作量和交付周期的不同,两个模式都要调的话,那调试周期就要加倍。
但如果和对方对接的是管项目的,他可能对此不太了解,一般都会询问这两个模式有什么差别?那种模式更好?所以本文主要从产品端来描述一下这两种模式输出的区别及优劣。
2、问题分析
优势:
1)动态范围:HDR能保留更多高光和阴影细节,避免SDR中常见的"过曝"或"死黑"现象。
以两曝光,行交叠HDR为例(sony的叫法是 digital overlap HDR,ov的叫法是staggered HDR)。
Exposure ratio = Long exposure time/ short exposure time, 假设Exposure ratio = 16,在信号没有饱和的条件下,相当于曝光最大值增大了16倍:2^4,也就是动态范围扩大了4个bit。
以此类推,每增加一个曝光帧,如果exposure ratio =16,动态范围就可以扩大4bit。
按照一般HDR sensor 单曝光为12bit来算的话,4曝光就可以让sensor输出的动态范围扩大到24bit(12+4+4+4)。
所以若设备使用场景对动态范围有要求(如门铃、车载相机),可选择使用支持HDR模式的Sensor。
局限:
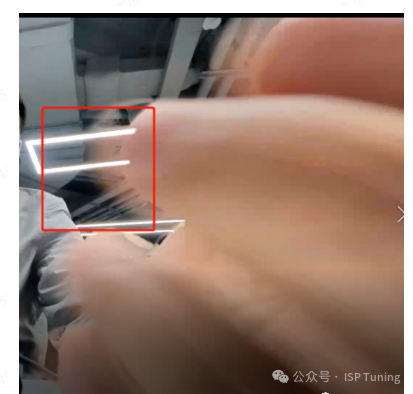
1) 存在运动伪影:Sony在推出 DOL(digital overlap) HDR 的时候,宣传DOL是'准同时'输出长短曝光。既然是'准同时',那就还不是同时,所以就会有一些典型时域多帧HDR的图像质量问题。
2)SNR(信噪比)下降:在图像中,SNR 反映了画面干净程度, SNR 高 → 噪声少; SNR 低 → 噪声多。
HDR 模式在某些亮度区域下会出现信噪比下降的现象(高亮区域来自短曝光帧,为防止高亮区饱和,短曝光时间很短,积累的光电子少,读出噪声占比更高,SNR会下降)。
3)Flicker:交流电供电光源会造成的flickering,形成banding。为了避免banding,就得让最小曝光时间是半周期的整数倍,这样就不会出现banding了。
但是由于最小曝光时间变大了,动态范围就损失了。所以有时候为了保证不损失动态范围,就得容忍Flickering;
4)车载应用丢失LED信号灯:在车载场景中,LED信号灯普遍采用 PWM 调光, 光源以高频闪烁的方式实现亮度控制。
在 HDR 模式下,长曝光时间较长,容易覆盖多个 LED 亮周期,因此能捕获到完整的光脉冲;短曝光帧时间短,如果恰好落在 LED 熄灭区间,就无法捕获到光信号。
当 HDR 合成时,部分像素来自长帧、部分来自短帧,如果短帧未捕捉到LED亮光,就会在合成图中出现 闪烁(Flicker)或信号灯缺失。这种闪烁或者信号灯信息丢失的问题在车载成像系统上是致命的。
5)数据传输带宽增加:如下是sensor厂提供的两套sensor setting(包括SDR和HDR模式),同样配置下HDR模式由于输出数据量大,mipi速率会更高,
在需要高分辨率或高帧率HDR的情况下,MIPI等接口的带宽可能成为瓶颈(比如我司平台支持的mipi速率,单lane需 < 1500Mbps)。

6) 功耗会提升: 在 HDR 模式下,Sensor 通常需要在同一帧周期内完成多次曝光与多次读出( 例如短帧、长帧 ),
ISP 需要进行 HDR 合成(帧间对齐、加权融合、去噪等),算法复杂度高,需要更多内存带宽与运算资源,导致 Sensor 和 ISP功耗都会上升。