1.摘要
传统无人机车辆路径问题常假定车辆速度固定,难以反映城市拥堵、碳排放和服务时效。本文研究无人机参与的时间依赖车辆路径问题(TDVRP-D),以总运营成本和最大运输时间为双目标,提出非支配排序自适应大邻域搜索算法(NSALNS)求 Pareto 解。实验显示,NSALNS 相比 NSSA 平均成本和时间分别降低 6.23% 与 7.50%,相比 NSVNS 分别降低 5.19% 与 6.91%。
关键词:多目标优化;时间依赖车辆路径;自适应大邻域搜索;卡车---无人机协同配送
2.问题描述与建模框架
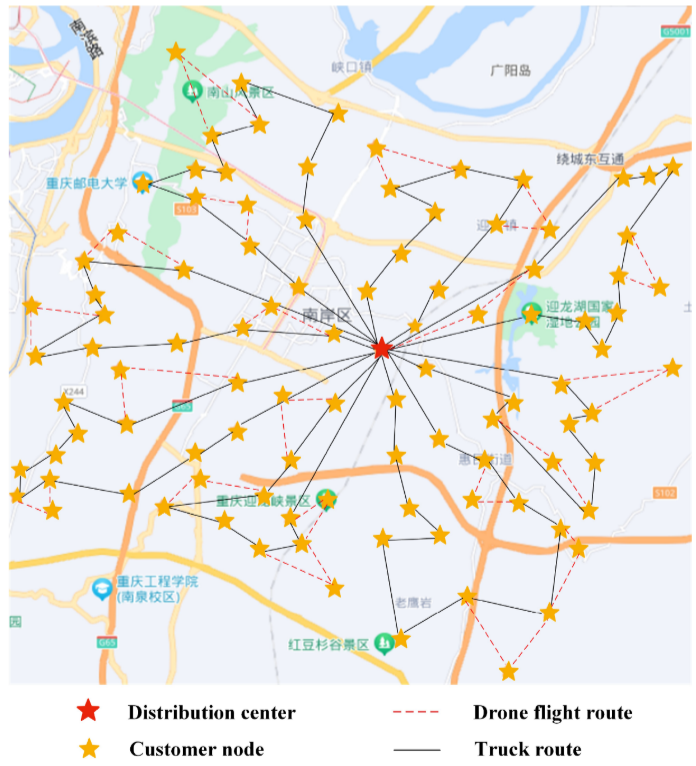
配送系统由一个配送中心、若干客户、若干卡车和对应无人机组成,卡车与无人机一一绑定。每个客户只能由卡车或其绑定无人机服务一次,需求不可拆分;无人机一次只服务一个客户,可在配送中心或卡车路径上的客户节点起飞、回收;卡车和无人机可相互等待;无人机完成任务后更换满电电池,换电时间不计。问题是在满足载重、同步和访问约束下,确定卡车路径、无人机任务和回收点。
总运营成本由卡车运输成本、无人机运输成本和卡车碳排放成本构成:
C=∑k∈K∑i∈N1∑j∈N2c1dijxijk+∑k∈K∑i∈N1∑j∈N∑h∈N2c2(dij+djh)yijhk+λ∑k∈K∑i∈N1∑j∈N2Eijkxijk C=\sum_{k\in K}\sum_{i\in N_1}\sum_{j\in N_2} c_1d_{ij}x^k_{ij} +\sum_{k\in K}\sum_{i\in N_1}\sum_{j\in N}\sum_{h\in N_2}c_2(d_{ij}+d_{jh})y^k_{ijh} +\lambda\sum_{k\in K}\sum_{i\in N_1}\sum_{j\in N_2}E^k_{ij}x^k_{ij} C=k∈K∑i∈N1∑j∈N2∑c1dijxijk+k∈K∑i∈N1∑j∈N∑h∈N2∑c2(dij+djh)yijhk+λk∈K∑i∈N1∑j∈N2∑Eijkxijk
最长运输时间为各卡车总运输时间的最大值:
Δ=max{δ1,δ2,...,δm} \Delta=\max\{\delta_1,\delta_2,\ldots,\delta_m\} Δ=max{δ1,δ2,...,δm}
多目标模型目标为:
minf1=C,minf2=Δ \min f_1=C,\qquad \min f_2=\Delta minf1=C,minf2=Δ
3.多目标 NSALNS 算法
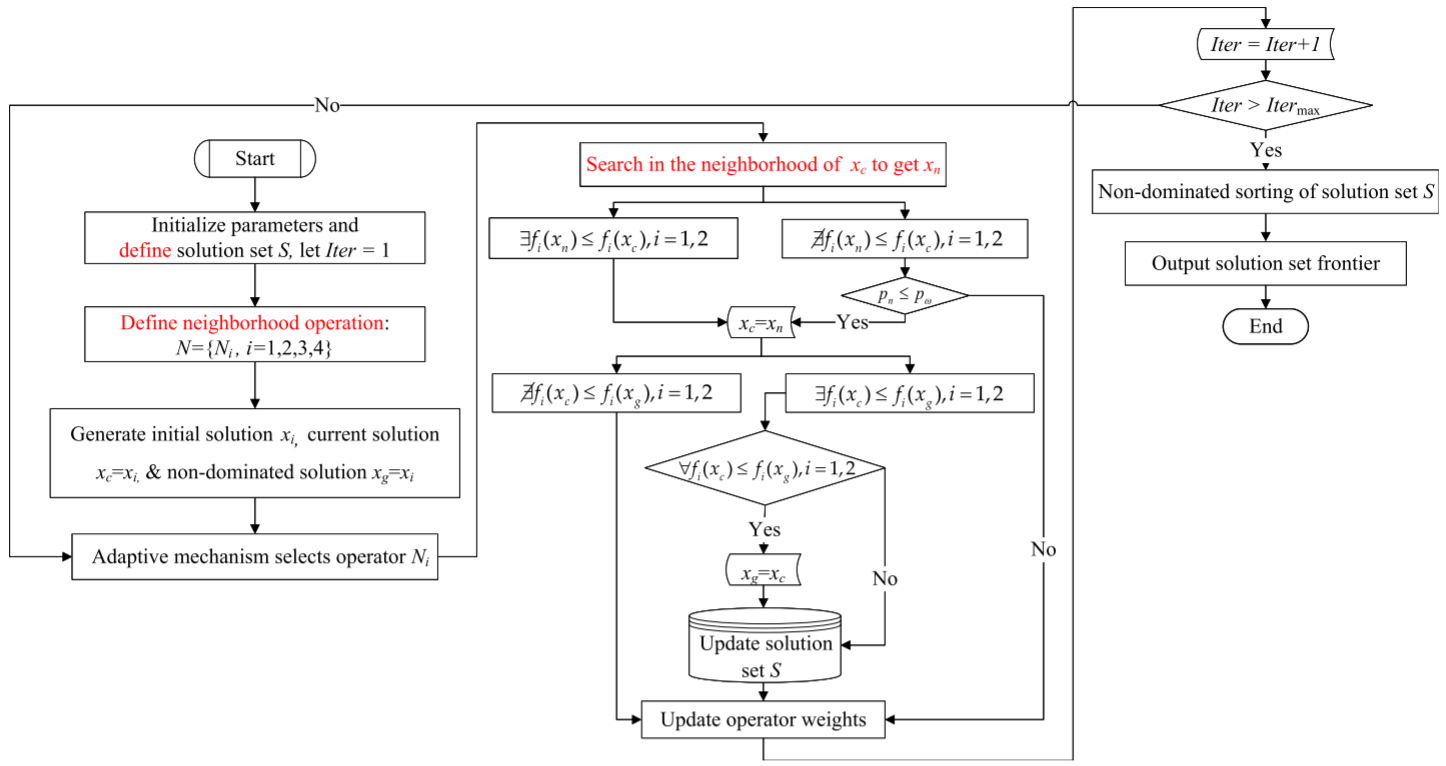
NSALNS 以 ALNS 的破坏---修复搜索为主体,用非支配关系评估新解并维护 Pareto 解集。若新解支配当前解或与其非支配,则接受并加入候选集;否则按概率接受,以避免陷入局部最优。迭代中不断用非支配排序删除被支配解,保留 Pareto 前沿。
初始解生成
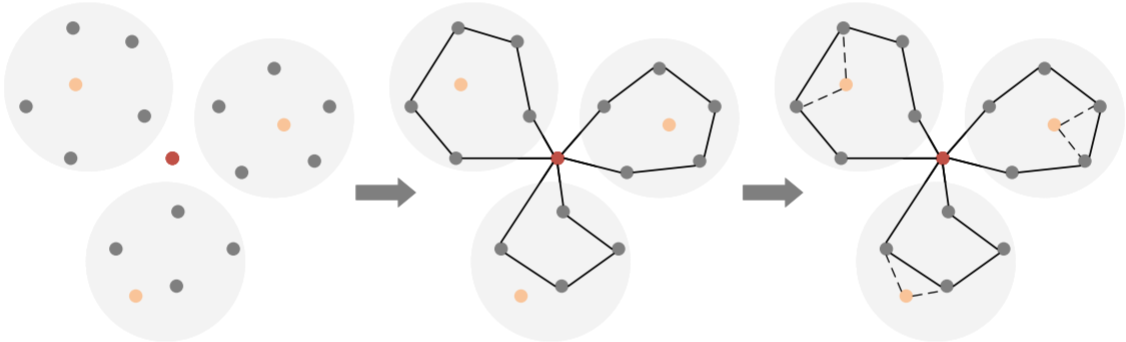
初始解先用 K-means 将客户分组,并按比例选择无人机服务客户;再在每条路径上用贪心法为无人机客户寻找最近的起飞与回收节点;若多个无人机任务冲突,则调整起飞和回收节点。
邻域操作
算法设计四类邻域 路径内移除并重插客户;路径内交换两个纯卡车客户;移除一组无人机起飞---服务---回收节点并重插;在不同子路径间重新分配客户,使各车任务量更均衡,减少最长运输时间。
自适应调整机制
算子按效果得分并动态更新权重,轮盘赌选择下一算子。权重更新为:
ωn={ωn,Tn=0(1−ξ)ωn+ξρnTn,Tn>0pn=ωn∑m=14ωm \omega_n= \begin{cases} \omega_n, & T_n=0\\ (1-\xi)\omega_n+\xi\frac{\rho_n}{T_n}, & T_n>0 \end{cases} \qquad p_n=\frac{\omega_n}{\sum_{m=1}^{4}\omega_m} ωn={ωn,(1−ξ)ωn+ξTnρn,Tn=0Tn>0pn=∑m=14ωmωn
若新解同时改善两个目标,算子得分最高;若只形成非支配关系,得分次之;若无改进,得分较低。这样搜索会自动偏向更有效的邻域。
非支配排序
非支配排序逐一比较种群中解的支配关系,先取无任何其他解支配的第一层,再移除后继续生成下一层。排序复杂度为 (O(n^2)),NSALNS 总体时间复杂度为 (O(mn^2)),空间复杂度为 (O((m+g)n))。
4.实验分析
算法性能比较
对比算法为 NSSA、NSVNS 和 NSALNS。差距指标为:
GAP=TX−TNSALNSmax{TX,TNSALNS} GAP=\frac{T_X-T_{NSALNS}}{\max\{T_X,T_{NSALNS}\}} GAP=max{TX,TNSALNS}TX−TNSALNS
10 次运行均值表明,NSALNS 在各规模上整体最优。相较 NSSA,平均运输成本和时间分别改善 6.23% 与 7.50%;相较 NSVNS,分别改善 5.19% 与 6.91%。配对 t 检验显示,NSALNS 与两种对比算法在成本和时间上的差异大多显著,尤其成本与时间相对 NSSA、NSVNS 的 p 值均小于 0.001。覆盖率、Spacing 和 HV 指标也表明 NSALNS 的 Pareto 解更多、更均匀,整体质量更高。
多目标结果分析
在 R201 的多规模实验中,若只追求最低成本,运输时间较最短时间解增加 7.94%、13.57%、10.61%、7.32% 和 10.23%;若只追求最短时间,成本较最低成本解增加 2.23%、6.33%、7.14%、4.42% 和 3.48%。
外链图片转存中...(img-oB8A0y1r-1781940038489)
5.参考文献
Peng Y, Zhang C, Tanksale A, et al. Multi-objective optimization for time-dependent vehicle routing problem with dronesJ. Expert Systems with Applications, 2025, 291: 128503.
6.算法辅导·应用定制·读者交流
xx