目录
一、拉梅系数
(1)为什么要有不同坐标系及拉梅系数?
直角坐标系虽然十分直观,符合人们的习惯。但在处理一些具有对称性的场问题时会非常麻烦。比如点电荷激发的球对称辐射电场、同轴电缆激发的柱对称电场等。这些场景下直接使用球坐标、柱坐标会方便很多。
而拉梅系数则是连接不同正交坐标系与直角坐标系的桥梁,它直接定义了不同坐标系下线元的转换系数,而有了线元后面元、体积元等就十分好求了。
(2)柱坐标系下的拉梅系数
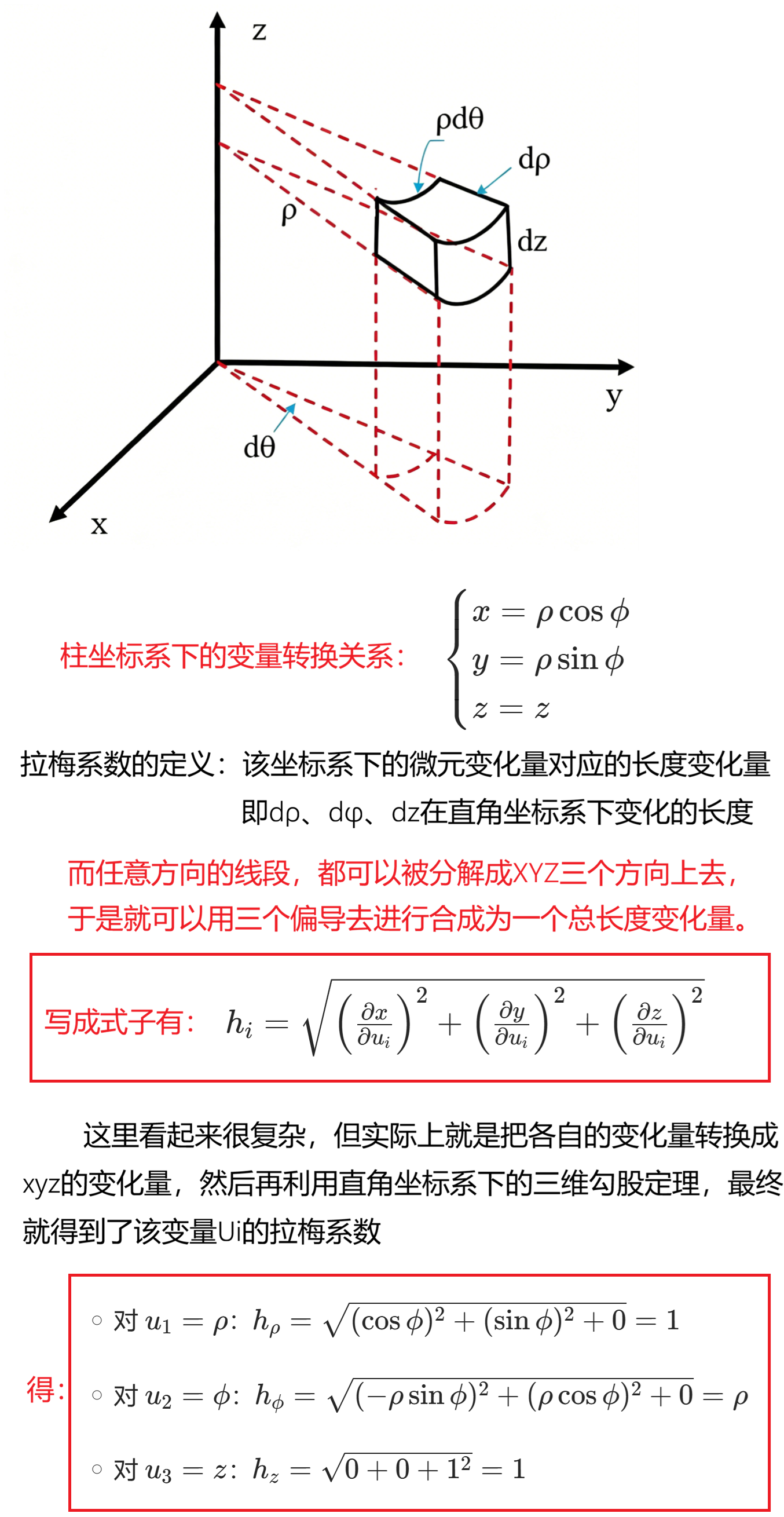
这里强调一点: 拉梅系数本身并不是很难的知识,它仅仅是表示你在柱面坐标系下,任意移动微小量之后,比如移动dφ的角度,变化前后两点之间的距离。
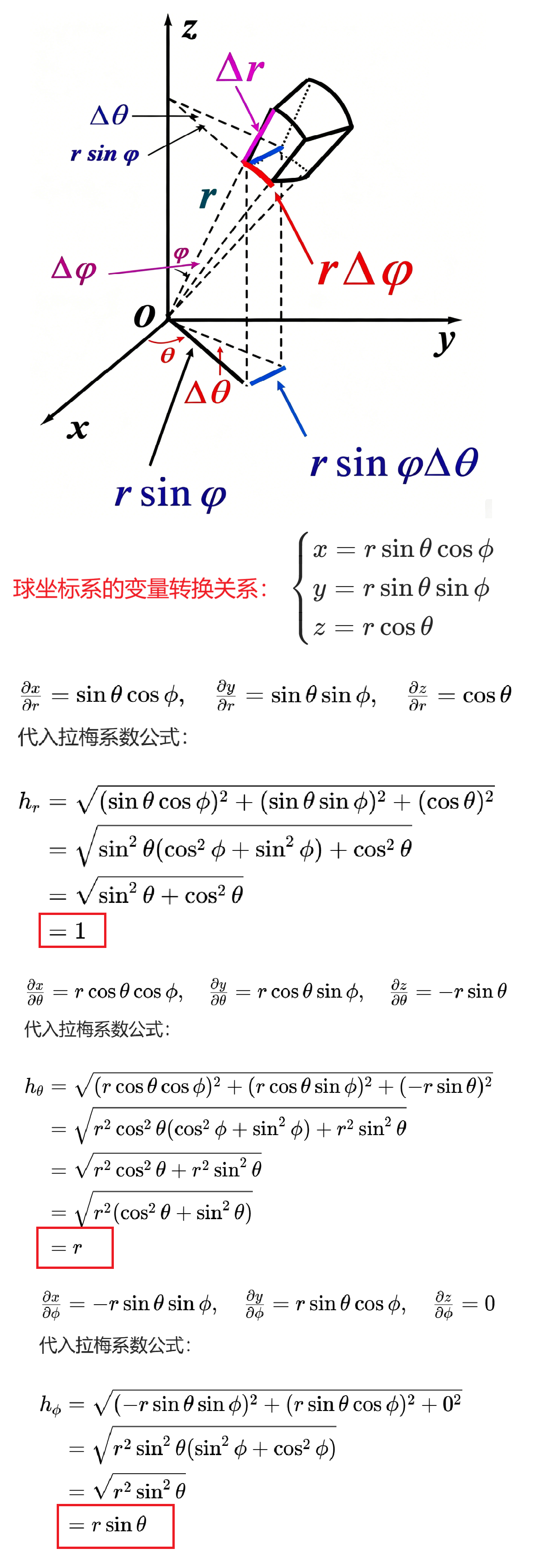
(3)球坐标系下的拉梅系数
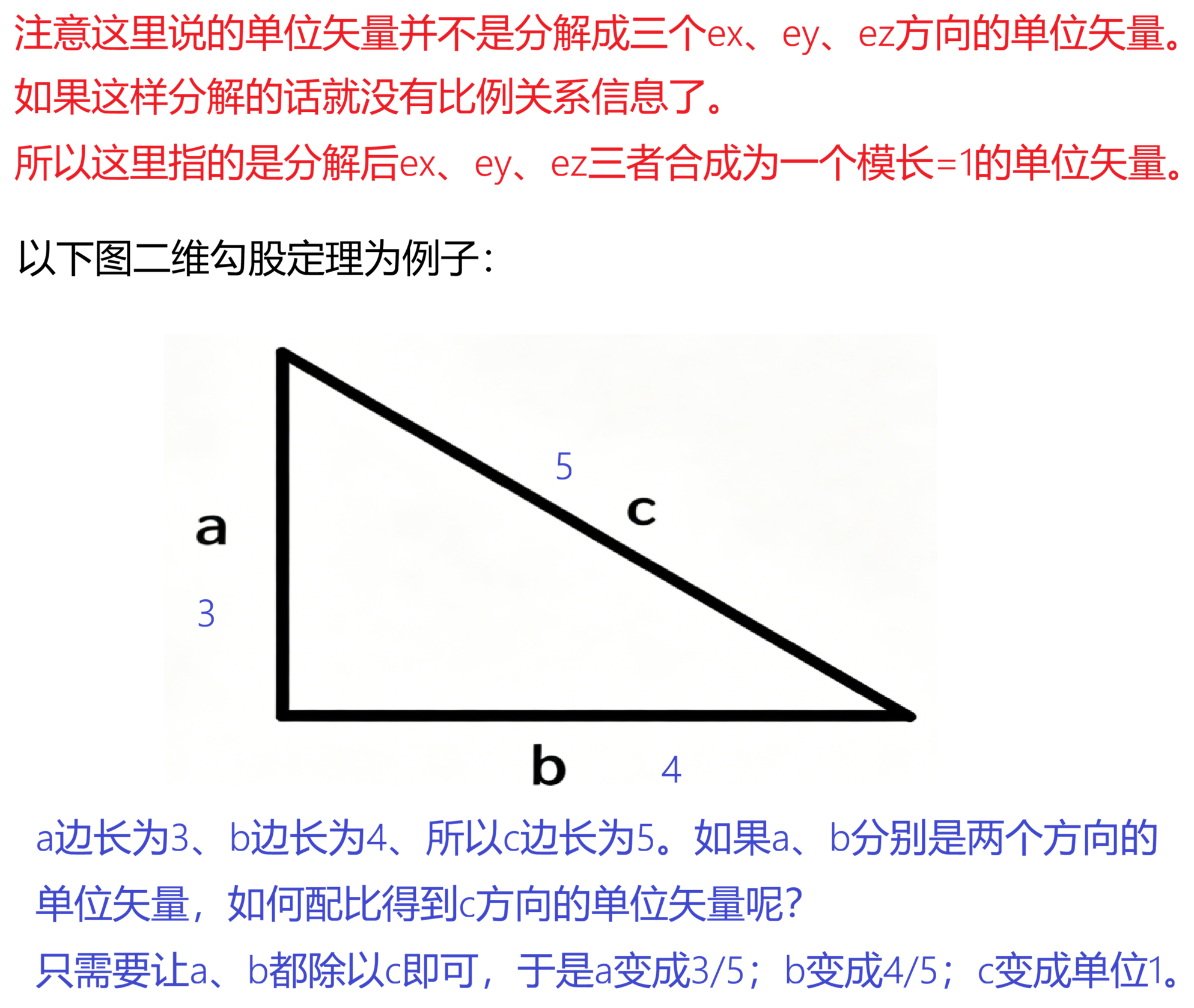
(4)拉梅系数下的三维勾股定理
在不同的坐标系下,虽然有着不同的变量。比如柱坐标系就是ρ、φ、z。但是这三个变量刚好也是相互正交的,于是可以有勾股定理,只不过这个勾股定理需要乘上拉梅系数。
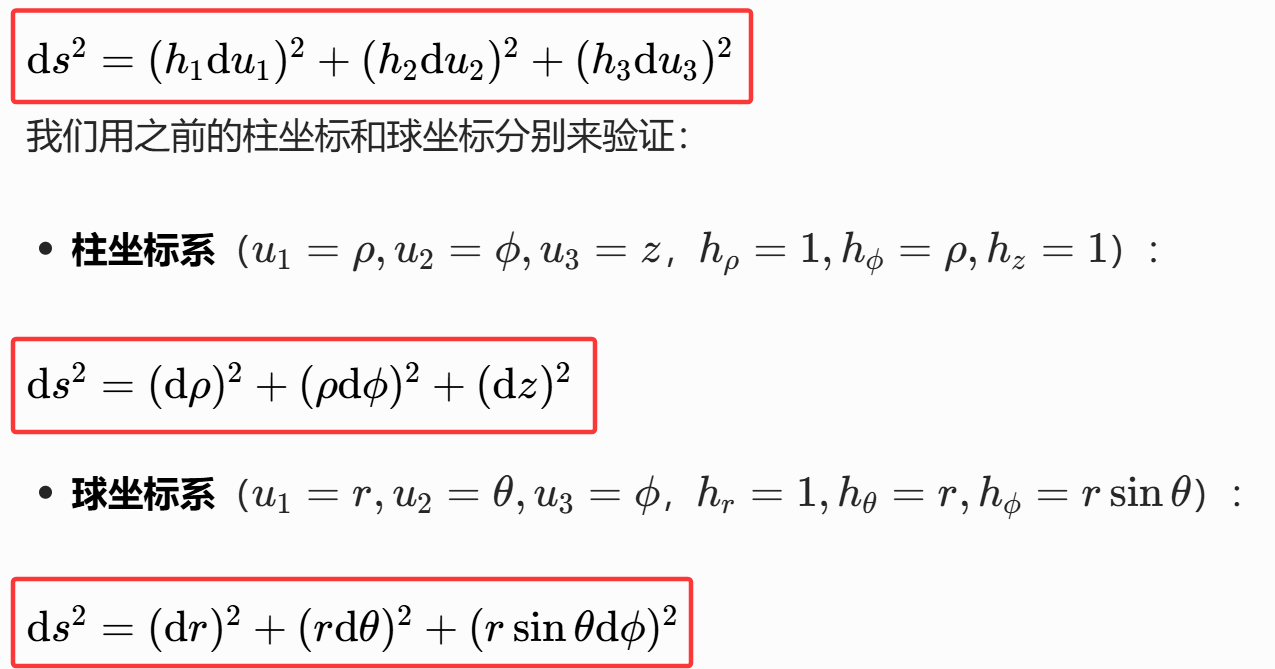
因为我们说拉梅系数就是将不同变量的微元转换到长度后的结果,而无论是球坐标系还是柱面坐标系,都是正交坐标系,即三个变量是两两垂直的,于是(线元)必定满足勾股定理。(这里需要与直角坐标系的勾股定理区分开来,他们是完全不同角度的勾股定理)
二、基矢量的变换矩阵
变换矩阵仅仅是把每一个的变换规则,强行凑到矩阵中,方便记忆。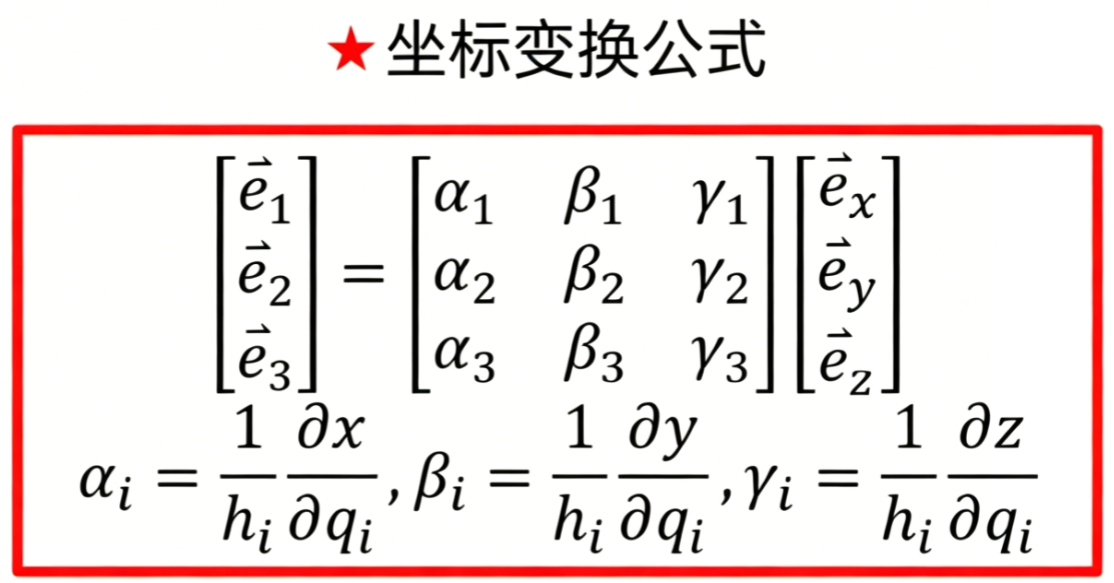
这里的变换本质就是将拉梅系数拆解成三个方向(拉梅系数求法的逆过程),不再用三维勾股定理进行合并了,先用xyz对每个方向求偏导得到的变化长度,然后再除以拉梅系数用来归一化,最终得到的就是xyz直角坐标系下的单位矢量。
这个矩阵大家并不需要记忆,只需要理解其原理即可,一般考试的时候题目会直接给出变换矩阵。如果想要从直角坐标系变换成其他坐标系,则用线性代数的知识,求矩阵的逆矩阵即可。
有了基矢转换矩阵后,以后其他正交坐标系的分解就变得很容易了。比如有一个柱坐标系(r、θ、z),分别在三个方向上有分量,那么则可以通过上述的基矢转换矩阵转换成xyz的单位矢量,然后再把r、θ、z分别转换出的结果对应矢量相加即可。
三、柱、球坐标系的基矢变换矩阵、梯度旋度散度公式改造
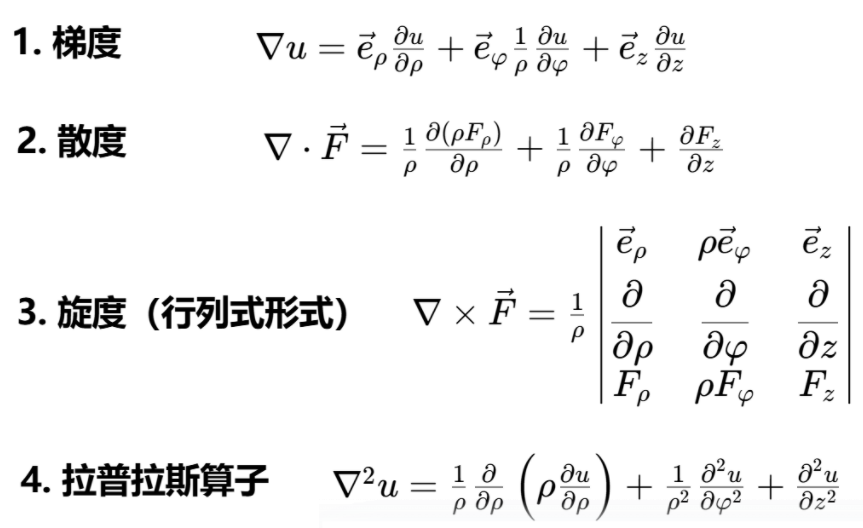
(1)柱坐标系
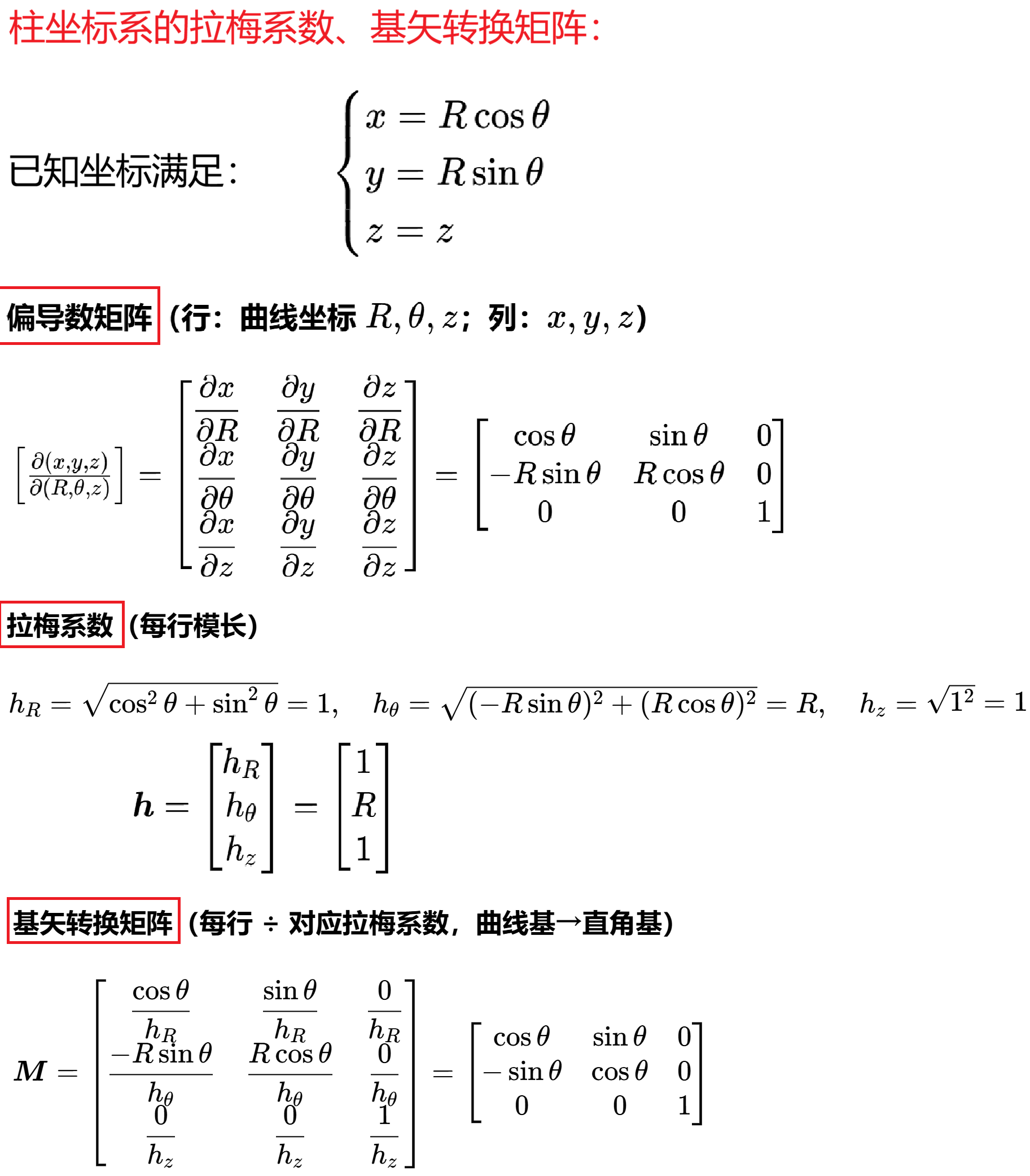
有了这个基矢转换矩阵,就可以方便的进行直角坐标系、柱坐标系的矢量转换了。而我们之前已经学习过了直角坐标系下的梯度、散度、旋度等求解,只需要吧xyz分量改造成柱坐标系的R、θ、Z即可。当然这个过程涉及到上述矩阵的求逆、带入化简等过程,比较繁琐。
好在考试一般也不会考察,这里直接给出柱坐标系下的求解公式:
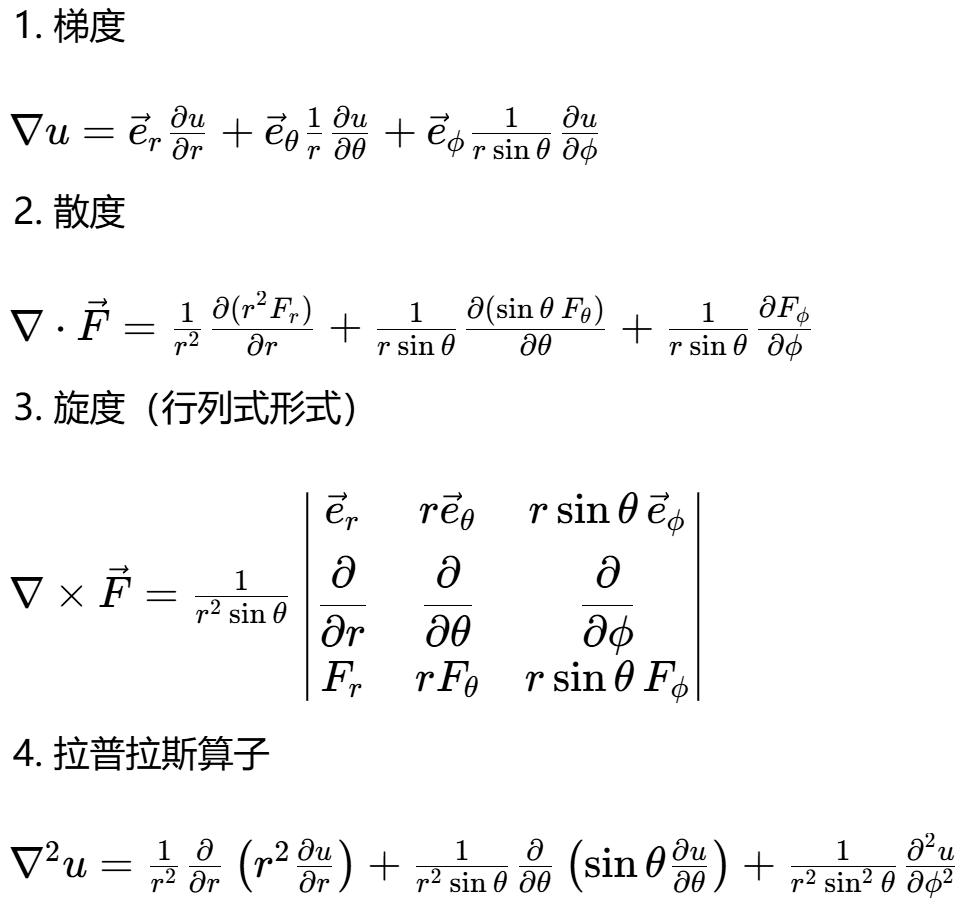
(2)球坐标系

球坐标系下各种度、拉普拉斯算子的表达形式:
(3)简化记忆、计算技巧
由于我本人对于这种记忆背诵内容比较反感,而让我临时求解逆矩阵,再化简得到上述改造后的公式又容易计算错误,所以建议大家只使用直角坐标系下的三度、拉普拉斯算子。
如果遇到柱坐标系、球坐标系,则正着使用基矢转换矩阵,将他们转换成直角坐标系下的矢量后,再用直角坐标系下的公式进行求解即可。
不过这里容易漏掉的是链式求导法则,即想要使用直角坐标系首先得换成对xyz的微分形式。