海洋垃圾目标检测数据集:15类别 | 目标检测
源码数据分享
通过网盘分享的文件:15类海底垃圾检测数据集
链接: https://pan.baidu.com/s/1CHsvw9DjuPOuPuIDj4x-1g?pwd=94yw
提取码: 94yw
文章继续
一、海洋污染:全球性危机与智能化破局
海洋覆盖了地球表面约71%的面积,不仅是地球最大的生态系统,更是维持全球生态平衡的关键调节器。然而,随着工业化进程的加速和消费模式的改变,人类活动产生的废弃物正以惊人的速度涌入海洋环境,形成了日益严峻的海洋垃圾污染问题。
据联合国环境规划署(UNEP)的评估报告,全球海洋中漂浮的塑料碎片超过5万亿个,总重量估计超过26万吨。而海底沉积的垃圾更是难以计数,保守估计是水面漂浮垃圾的数十倍之多。这些垃圾中,塑料制品占比最高,从一次性塑料袋、饮料瓶到渔网、泡沫箱,几乎涵盖了日常生活的方方面面。
海洋垃圾对生态系统的影响是全方位的、深层次的:
直接致死:海洋生物误食塑料或被渔网缠绕导致死亡,每年约有100万只海鸟和10万只海洋哺乳动物因此丧生。
微塑料污染:大块塑料在海水中逐渐碎裂成微塑料,进入食物链,最终回到人类餐桌。
生态破坏:垃圾覆盖珊瑚礁,阻挡阳光,导致珊瑚白化;沉积在海底的垃圾改变底栖生物的栖息环境。
经济影响:海洋垃圾影响渔业、旅游业和航运业,每年造成的经济损失高达130亿美元。
传统的海洋垃圾治理方式主要依赖人工打捞和海滩清理,这种方式效率极低、成本高昂,而且只能触及"冰山一角"------大量的海底垃圾和远洋漂浮物根本无法通过人工方式处理。近年来,随着人工智能与无人系统技术的发展,基于计算机视觉的智能检测方案逐渐成为海洋垃圾治理的新希望。
在这一技术路径中,高质量的数据集是模型训练的基石。本文详细解读的"15类海洋垃圾多类别检测数据集",正是为推动海洋智能检测技术发展而构建的专业数据资源。
二、海洋垃圾检测的独特挑战
海洋环境中的垃圾检测与常规目标检测任务有着本质区别,其独特的技术挑战需要在数据集设计和模型训练中予以充分考虑。
2.1 环境复杂性
水面反光与波纹干扰:水面是天然的镜面,阳光照射下会产生强烈的镜面反射和波纹折射,这些光学干扰会严重影响图像质量,使目标轮廓模糊、颜色失真。
水体浑浊与能见度:近海和河口区域的水体常常浑浊,悬浮颗粒多,能见度低,使得水面和水下的垃圾难以被清晰识别。
光照与天气变化:从正午的强烈阳光到阴天的暗淡光线,从晴空万里到大风大浪,海洋环境的光照和天气条件变化剧烈,对检测模型的鲁棒性提出了极高要求。
2.2 目标多样性
形态各异:海洋垃圾种类繁杂,从规则的塑料瓶到不规则的渔网,从细小的手套到大型的轮胎,形态差异悬殊。
分布随机:垃圾可能漂浮在水面、悬浮在水中或沉积在海底,位置不固定,运动状态不确定。
状态变化:垃圾在海水浸泡、阳光暴晒和生物附着后,外观会与初始状态发生显著变化,如褪色、变形、附生等。
2.3 检测难点
小目标问题:如口罩、手套等小型垃圾在广角画面中占比极小,检测难度大。
遮挡与重叠:垃圾之间可能相互覆盖或与海藻、岩石等自然物混合,增加识别难度。
类内差异大:同一类垃圾可能因使用状态、破损程度、环境附着等因素呈现截然不同的外观。
理解这些挑战,对于合理使用该数据集、设计有效的训练策略至关重要。
三、数据集全景解读
3.1 核心参数
本数据集是一套面向海洋环境垃圾目标检测任务构建的高质量数据集,核心参数如下:
- 图像总量:近7400张高质量标注图像
- 标注类型:目标检测(Bounding Box)
- 标注格式:YOLO标准格式
- 类别数量:15类
- 数据来源:真实海洋与近海环境采集
- 场景覆盖:近海水域、滩涂区域、水面漂浮场景
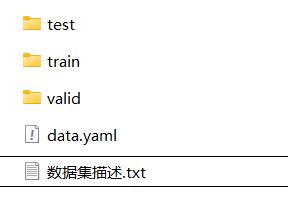
3.2 目录结构
database/海洋垃圾多类别检测数据集/
├── train/
│ └── images/
├── valid/
│ └── images/
├── test/
│ └── images/结构规范,支持开箱即用。
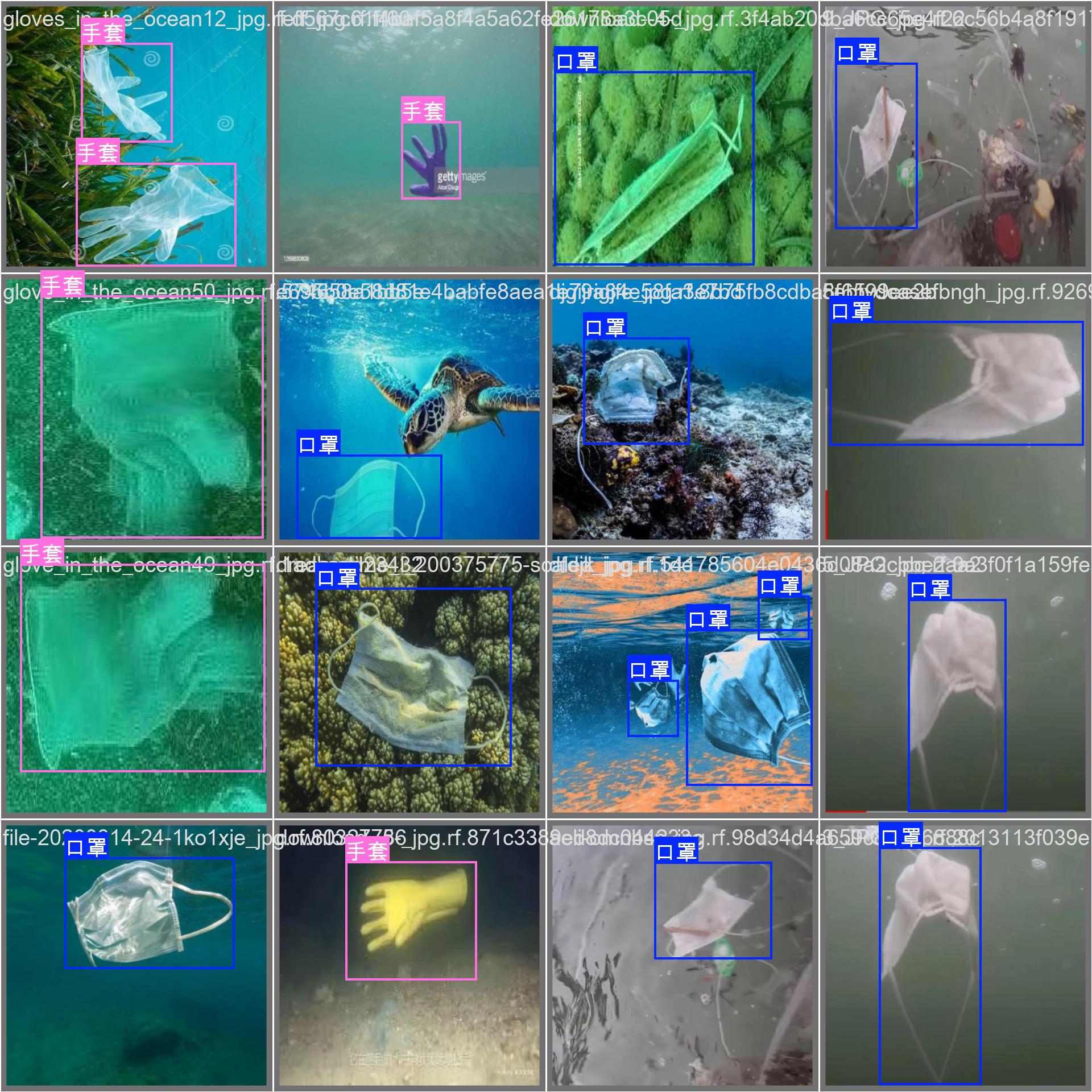
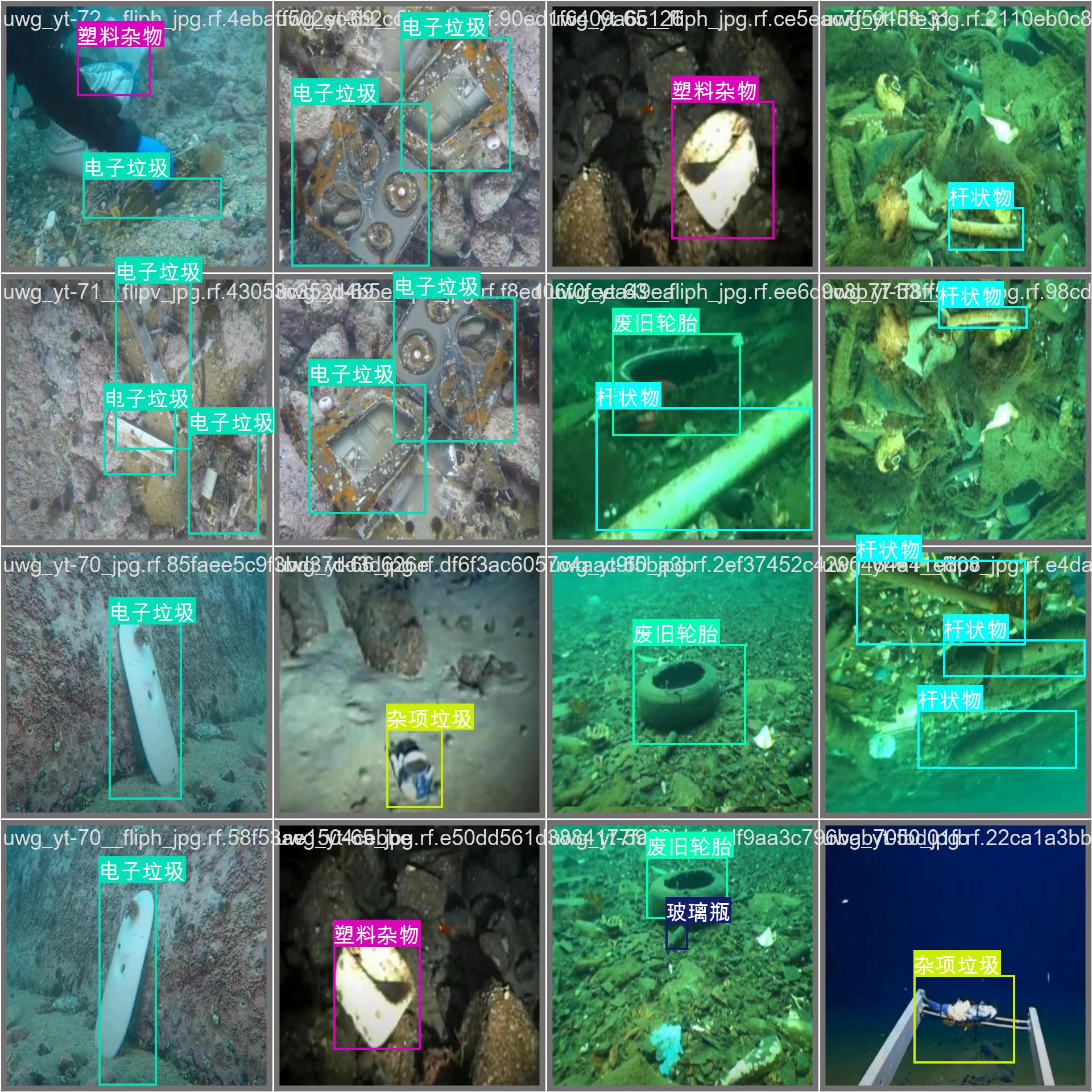
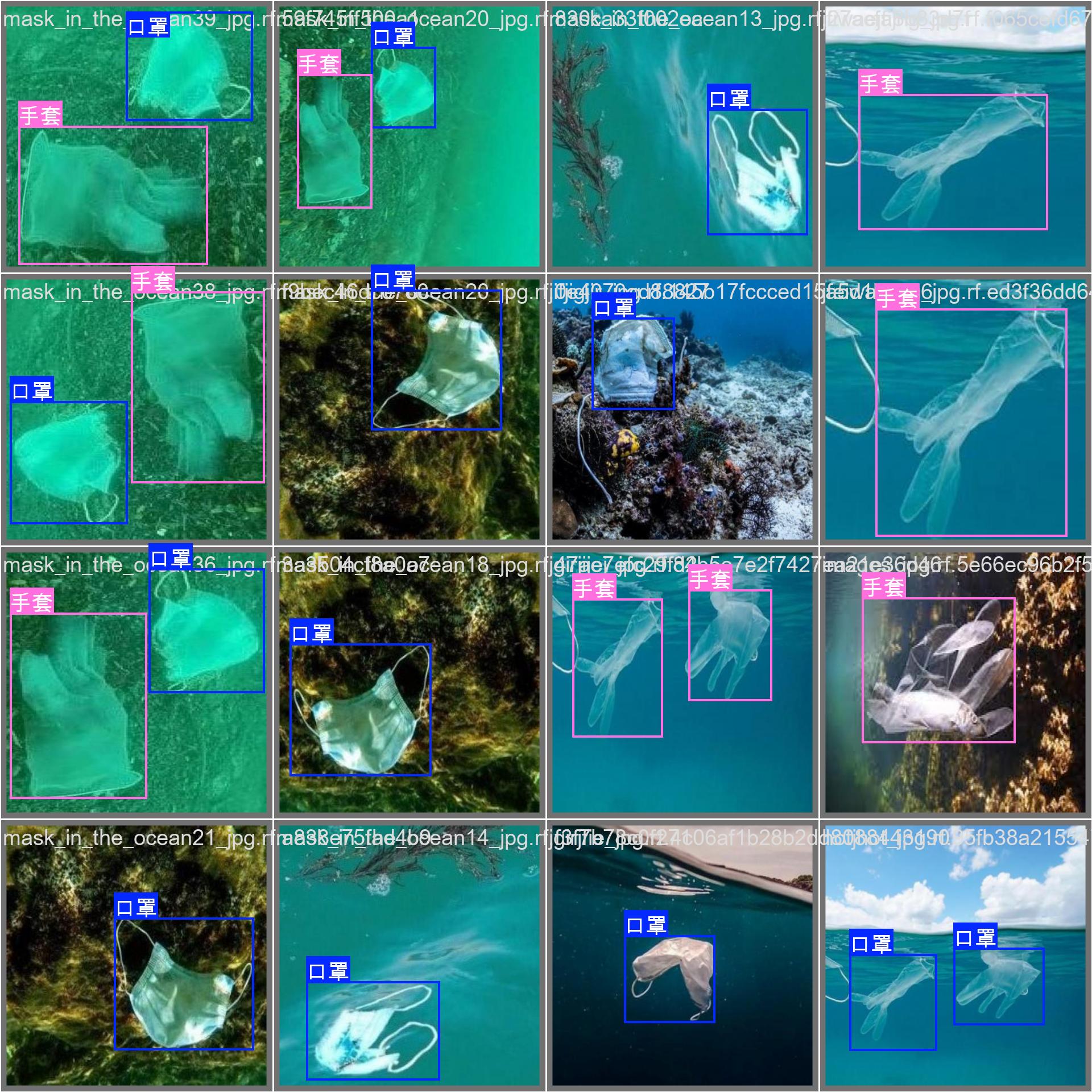
3.3 15类海洋垃圾体系详解
数据集共定义15类海洋垃圾目标,覆盖了海洋环境中最常见的垃圾类型:
| 序号 | 类别名称 | 危害等级 | 典型特征 |
|---|---|---|---|
| 1 | 口罩 | 高 | 疫情后新增高频垃圾 |
| 2 | 易拉罐 | 中 | 金属反光,规则形状 |
| 3 | 手机 | 高 | 电子垃圾,含重金属 |
| 4 | 电子垃圾 | 高 | 含有毒有害物质 |
| 5 | 玻璃瓶 | 中 | 透明或半透明,易碎 |
| 6 | 手套 | 中 | 疫情后新增高频垃圾 |
| 7 | 金属杂物 | 中 | 形态多样,可能腐蚀 |
| 8 | 杂项垃圾 | 中 | 无法精确分类的垃圾 |
| 9 | 渔网 | 高 | 幽灵捕捞,缠绕生物 |
| 10 | 塑料袋 | 高 | 误食致死,难以降解 |
| 11 | 塑料瓶 | 高 | 数量最多,降解缓慢 |
| 12 | 塑料杂物 | 高 | 碎片化,微塑料来源 |
| 13 | 杆状物 | 低 | 木材或金属杆状物 |
| 14 | 太阳镜 | 低 | 数量较少 |
| 15 | 废旧轮胎 | 中 | 体积大,降解极慢 |
类别设计的亮点:
时代性:纳入口罩和手套类别,反映了新冠疫情后个人防护装备成为新型海洋垃圾的现实。
全面性:从日常消费品(塑料瓶、易拉罐)到工业废弃物(电子垃圾、轮胎),覆盖面广。
危害分级:不同类别对海洋生态的危害程度不同,这种分类体系有助于在清理作业中优先处理高危害垃圾。
四、数据质量与标注体系
4.1 数据采集质量
7400张图像均来源于真实海洋与近海环境采集,图像特点包括:
- 清晰度高,可识别细节
- 多样性强,涵盖不同场景和条件
- 真实性高,保留自然环境的各种干扰因素
4.2 标注规范
- 标注方式:目标检测框(Bounding Box)
- 标注格式:YOLO标准格式
- 标注流程:人工精标 + 多轮复核
- 标注质量:高精度、低误差
所有样本均经过严格校验,无明显错标或漏标问题。标注的准确性直接决定了模型训练效果的上限,该数据集在标注质量控制方面的投入,是其核心价值的重要保障。
4.3 场景覆盖
数据集涵盖多种典型海洋环境:
近海水域:最常见也是垃圾密度最高的区域。
滩涂区域:潮汐涨落带来的垃圾沉积区。
水面漂浮场景:漂浮垃圾的实时检测场景。
同时包含复杂条件:
- 不同光照(强光、水面反光)
- 多视角拍摄
- 背景干扰(水波、泥沙)
- 目标遮挡与重叠
这些复杂条件的覆盖,使得在该数据集上训练的模型能够应对实际应用中遇到的各种挑战。
五、模型训练与优化策略
5.1 基础训练配置
数据配置文件:
yaml
path: database/海洋垃圾多类别检测数据集
train: train/images
val: valid/images
names:
0: mask
1: can
2: phone
3: e_waste
4: glass_bottle
5: glove
6: metal
7: misc
8: fishing_net
9: plastic_bag
10: plastic_bottle
11: plastic_debris
12: rod
13: sunglasses
14: tire训练命令:
bash
yolo detect train \
data=data.yaml \
model=yolov8s.pt \
epochs=200 \
imgsz=640 \
batch=165.2 海洋场景专项优化
水面反光处理:在数据增强中加入随机亮度、对比度调整,模拟不同反光条件。
颜色增强:海洋图像的色彩分布与陆地区别较大,可以通过HSV增强增加色彩多样性。
多尺度训练:垃圾目标尺度差异大,建议启用多尺度训练。
难样本挖掘:对遮挡严重、部分沉没等困难样本进行重点训练。
5.3 参数推荐
| 参数 | 推荐值 | 说明 |
|---|---|---|
| model | yolov8s / yolov8m | 15类需要较强特征提取能力 |
| epochs | 200~300 | 大数据量需要充分训练 |
| imgsz | 640 / 768 | 小目标建议提高分辨率 |
| batch | 8~16 | 根据GPU显存调整 |
六、应用场景深度剖析
6.1 海洋垃圾自动检测系统
基于该数据集训练的检测模型,可以部署在岸基摄像头、无人船或无人机上,实现对海洋垃圾的自动识别与定位。系统可以实时检测水面漂浮垃圾,标记位置和类别,生成垃圾分布图,为清理作业提供精确的目标信息。
6.2 无人船/无人机巡检
无人船可以搭载摄像头和检测模型,在近海区域进行自动化巡检,发现垃圾后自动记录位置和类型信息。无人机则可以从空中俯瞰大面积海域,快速扫描漂浮垃圾的分布情况。两种方式各有优势,可以根据场景需求灵活选择或组合使用。
6.3 海洋生态治理辅助
检测结果可以为海洋生态治理提供数据支撑,包括:
- 垃圾密度评估和趋势分析
- 污染热点区域识别
- 清理优先级排序
- 治理效果量化评估
6.4 水域环境监测
将垃圾检测与环境质量评估相结合,可以构建水域环境综合监测系统,实时掌握水体污染状况。
6.5 AI科研与教学
该数据集也是目标检测算法研究的理想实验平台,特别是针对水域场景的特殊挑战。
七、数据集优势与工程价值
7.1 数据规模充足
7400张图像的规模在海洋垃圾检测数据集中属于领先水平,能够支撑深度模型的充分训练,避免因数据不足导致的过拟合问题。
7.2 类别覆盖全面
15类垃圾覆盖了高频海洋垃圾类型,实用性强。特别是电子垃圾等特殊类别的引入,扩展了检测任务的广度。
7.3 场景真实性高
真实采集数据保留了水面反光、波纹干扰等实际环境因素,训练出的模型具备更强的落地能力。
7.4 标注精度高
人工精细标注保障了检测效果的可靠性,高质量标注是模型性能的坚实基座。
7.5 标准化结构
兼容YOLO、Faster R-CNN等主流框架,降低了使用门槛。
八、前沿研究与未来展望
8.1 跨域适应研究
海洋垃圾数据集通常来自特定海域,而不同海域的垃圾类型分布和环境条件存在差异。研究跨域适应方法,使模型能够快速适应新的应用场景,是重要的研究方向。
8.2 时序检测与预测
从单帧图像检测扩展到视频时序检测,利用时序信息进行垃圾轨迹追踪和聚集趋势预测,有望实现从"检测"到"预测"的升级。
8.3 多模态融合
将视觉数据与声呐、红外等非视觉传感器数据进行融合,构建多模态检测系统,可以在水质浑浊或夜间等视觉受限场景下保持检测能力。
8.4 垃圾溯源研究
基于检测到的垃圾类型和状态,结合洋流模型和风力数据,逆向追踪垃圾来源,为从源头减少海洋垃圾提供科学依据。
九、总结与思考
海洋环保是全人类共同面临的挑战,而智能化检测技术是应对这一挑战的重要手段。本15类海洋垃圾多类别检测数据集通过真实场景构建、多类别覆盖与高质量标注,为海洋垃圾检测提供了坚实的数据基础。
从数据集设计角度来看,这套数据集具有明显的"复杂场景驱动"特征。水域环境相比陆地更加复杂,数据集在光照、水面反射等因素上的覆盖,使其更具挑战性与价值。类别设计不仅包含常规垃圾,还引入电子设备等特殊类别,提升了检测任务的广度。大规模数据结合高质量标注,使其在训练深度模型时具备明显优势。这类数据集不仅服务于算法研究,更直接服务于海洋环保与生态治理。
无论是科研探索还是工程应用,该数据集都具备较高价值,是推动海洋智能检测技术发展和海洋生态保护的重要数据资源。