Camera驱动开发必备知识
硬件底层知识
1.图像传感器Sensor硬件原理
- 感光阵列、拜耳 RGB/IR、全局快门 / 卷帘快门、HDR、DOL HDR、多曝光
- 像素、分辨率、帧率、行场时序 HVsync、曝光、增益、模拟 / 数字增益
- 传感器接口:MIPI CSI-2(主流)、LVDS、Parallel、HiSPi
- 寄存器读写:I2C/SCCB、Sensor OTP 校准数据、模组 EEPROM
1.模组 EEPROM的作用是啥?
用于存储模组出厂标定参数
2.Soc硬件IP基础
- MIPI D-PHY/CPHY:lane 速率、LP/HS 模式、时钟、差错校验、复位
- CSI 接收控制器(CSI Host):解串、同步、数据打包、中断、DMA
- ISP 图像信号处理器流水线(原厂核心)
- 时钟树:PLL、像素时钟、MIPI 时钟、分频、门控、动态调频
- PMIC 电源:AVDD(模拟电源)/DOVDD(数字输出 IO 电源)/VDDIO(数字输出 IO 电源),上下电时序、漏电、浪涌保护
- GPIO 复位、PWM 闪光灯、AF 马达驱动、IR-Cut 红外切换
3.模拟图像基础 - 画质调优
- 曝光 AE、白平衡 AWB、自动对焦 AF、去噪 2D/3DNR、Gamma、对比度
- 镜头阴影 LS、色彩校正 CCM、黑电平校正 BLC、坏点校正 DPC
- HDR 融合、锐化 Sharpen、畸变矫正 LDC、鱼眼矫正
- 光学基础:景深、光圈、红外截止、杂散光、镜头畸变
嵌入式Linux内核驱动核心
1.Linux内核子系统
- 平台驱动框架
platform_driver、设备树 DTS/DTBO(必须精通) - 时钟子系统
clk、电源管理regulator、GPIO、pinctrl、中断 irq - DMA 子系统、内存管理:CMA、DMA-BUF、物理连续内存、缓存一致性
- I2C 子系统(Sensor/EEPROM/ 马达通用)
1.DMA和CMA是什么关系?
DMA是直接内存访问(硬件),只能支持连续的物理内存,不能识别CPU虚拟地址,MIPI/ISP/ 编码等外设用DMA来读取CMA分配的内存
CMA是连续内存分配器(软件),用于分配连续大块的物理内存(vmallo分配虚拟连续地址,kmalloc只能分配小块连续内存),他是通过DTS预留一块专用内存区域(cam reserved)
vmalloc分配虚拟地址连续,底层物理页是零散碎片化的,DMA无法直接使用,只能CPU读写,DMA无法使用
DMA-BUF:封装上面这块内存,用文件描述符 (fd) 跨进程、跨驱动传递,实现同一块内存多硬件共用,全程无 CPU 拷贝
vb2默认使用vb2-dma-config,底层就是CMA分配帧buffer,供DMA使用,分散聚集的dma(sg-list DMA),一般是网卡或其他外设使用
总结:DMA 是硬件搬运数据的通道(直接内存访问),CMA 是给这条通道准备大块连续物理内存的内存管理器;没有 CMA,DMA 就拿不到能正常使用的图像缓冲区。
2.Linux多媒体框架(两大路线)
(1) V4L2 - 标准Linux Camera框架(通用)
- 设备节点、subdev 子设备、media 框架 media_device、链路拓扑
- 数据流:streamon/streamoff、fmt、crop、compose、buffer 队列
- vb2 视频缓存管理、mmap/dma_buf 导出、多 buffer 环形队列
- subdev 操作:set_fmt、set_ctrl、get_selection、链接 pad 端口
(2) 原厂自研框架 - 瑞芯微/全志/高通
- 私有流水线、硬件管道绑定、多摄同步、硬件帧中断调度
(3)内核调试基础
- printk、dev_dbg、tracepoint、ftrace、irq 追踪、OOM 内存泄漏排查
- 寄存器读写工具 devmem、i2cdetect、mipi 信号抓包(MIPi信号怎么抓包?)
图像数据通路和总线协议
1.MIPI CSI-2 v1.x/v2.x 规范:数据包、短包 / 长包、虚拟通道 VC、数据类型 DT
2.MIPI DPHY/CPHY 电气规范、时序、异常:lane 掉线、CRC 错误、同步丢失
3.I2C/SCCB 通信时序、多设备冲突、寄存器分页读写
4.DMA 数据流:Sensor→CSI→ISP→内存 / 编码,硬件流水线并行
上层软件与标准化适配
- Android Camera 架构(大部分消费 SoC 需求)
- Camera HAL1/HAL3、Camera Service、APP、Metadata 元数据
- 3A 算法库对接、多摄同步、逻辑设备组合
- Linux 上层应用:v4l-utils、gstreamer、ffmpeg、yuv 图像格式
- 图像格式:RAW8/RAW10/RAW12/RAW16、YUV420SP/NV12/NV21、RGB
- 标定工具基础:模组标定、校准数据烧录、OTP 解析
工具与调试信息
- 示波器 / 逻辑分析仪:测 MIPI、I2C、复位、电源时序
- 图像抓包工具:抓取 RAW 流、YUV 帧、查看噪点 / 色偏 / 时序异常
- 寄存器自动化测试脚本、自动化帧率 / 稳定性压测
- 内存压测、长时间录像稳定性、高低温兼容性调试
额外进阶知识
- 多摄同步:硬件同步触发、PTP 时序、多 Sensor 曝光同步
- AI ISP/NPU 联动:AI 降噪、人脸 3A、目标检测预处理
- 低功耗:动态关 ISP、降 MIPI 速率、休眠唤醒、低帧省电模式
- 安全:Secure Camera、TEE 隔离 Sensor 数据流、DRM 数字版权
Camera驱动完整划分
按硬件数据流流向从前端到后端分层,原厂需要全部模块打通:
模块1:前端硬件控制模块(Sensor端)
Sensor 驱动子模块(v4l2-subdev 标准)
- I2C 寄存器读写封装、分页寄存器适配
- Sensor 上电 / 下电时序控制(regulator 时钟 GPIO 组合)
- 分辨率、帧率、binning、HDR 模式配置
- 曝光 / 增益 / 行长参数配置接口
- OTP/EEPROM 校准数据读取(镜头参数、模组增益)
- 中断处理:帧结束中断、同步信号中断
1.如果sensor子模块对应v4l2 subdev,那v4l2_dev对应什么物理设备?
subdev只负责模块内部控制,不负责输出图像buffer
v4l2_device不直接对应某一块独立硬件芯片 ,是 整条相机 Pipeline 的顶层管理容器 / 根管理器 ,是一个 软件管理对象 ,不是硬件实体;
内部维护一条链表subdevs,把同一条图像通路下所有subdev全部挂在自己下面统一管理;
camss持有media_device,管理各subdev之间的link数据流;
所有 video_device(/dev/videoX)、v4l-subdevX 都归属同一个 v4l2_dev;
父设备是 SoC 侧的硬件控制器(RP1 CSI 控制器、RK VI、全志 CSI 等 platform 设备)。
video_device是用户空间拿图像帧的设备/dev/videoX,对应硬件: CSI 接收 + DMA 缓存输出通路 ;负责 buffer 队列、mmap、stream 采集、输出 YUV/RAW 帧给应用
外设执行器模块
- AF 自动对焦马达驱动(VCM)
- IR-Cut 红外切换电机控制
- Flash 闪光灯 PWM 恒流驱动、频闪同步
MIPI PHY驱动模块(原厂核心 IP 驱动)
- DPHY/CPHY 硬件初始化、lane 数量配置,cphy是Trio三线组,三相三电平
- HS 高速 / LP 低功耗模式切换
- 速率配置、时钟校准、硬件差错重传
- 异常检测:lane 丢失、CRC 错误、时序溢出、硬件复位
模块2:CSI接收控制器 -CSI Host
MIPI 数据接收、解串、同步重组
- 虚拟通道 VC 映射、多 Sensor 数据区分
- 帧同步、行同步、丢帧检测、错误帧丢弃
- DMA 描述符管理,把 MIPI RAW 数据搬运到内存
- 裁剪、binning 硬件预处理、中断上报每一帧
- 多路 CSI 复用、时分多路输入控制
1.DMA能直接配置,将MIPI RX的数据直接共享到用户态吗?
不能。DMA 硬件仅能把 MIPI 数据写入物理内存;CPU 用户态只能访问虚拟地址,受 MMU 隔离限制,无法直接访问内核 DMA 物理内存,必须通过 mmap 建立虚实地址映射后,用户进程才能读取图像数据。
2.DAM-BUF的使用场景有哪些?使用的时候有什么限制吗?
DMA-BUF是共享内存载体,不是进程间通信通道;
DMA-BUF 是 Linux 内核提供的跨进程、跨 DMA 硬件的物理内存共享框架,通过 fd 实现零拷贝共享 DMA 可用的连续内存,不负责控制指令通信。
模块3:ISP图像处理器流水线模块
ISP 是 SoC 核心差异化模块,分为硬件寄存器驱动层 + 3A 算法对接层
硬件控制子模块
- BLC 黑电平校正、DPC 坏点校正
- LSC 镜头阴影校正、CCM 色彩矩阵
- 2DNR/3DNR 时域空域降噪、Gamma 矫正
- LDC 镜头畸变矫正、HDR 多曝光融合
- 锐化、对比度、饱和度硬件配置
- 硬件裁剪、缩放、旋转、格式转换 RAW→YUV
1.ISP使用什么语言开发的?一般的开发过程是什么?
3A算法对接模块
- AE 自动曝光接口:控制 Sensor 曝光、ISP 增益
- AWB 自动白平衡:色温、CCM 矩阵切换
- AF 自动对焦:马达驱动、对比度检测接口
- 元数据 Metadata 生成(曝光值、色温、镜头参数,供给上层 HAL)
模块4:内存与DMA管理模块
- CMA 连续内存分配、缓冲区池管理
- VB2 V4L2 缓存队列(用户态 / 内核态缓冲)
- DMA-BUF 共享缓冲区(给编码、NPU、显示共享帧)
- 缓存同步(cache flush/invalidate,避免花屏)
- 多缓冲区环形队列、延迟控制、丢帧策略
1.VB2中的缓冲队列是用什么方式申请的
上层触发: 用户态 VIDIOC_REQBUFS 发起队列与缓冲区创建; 指定缓冲数量、内存类型(MEMORY_MMAP / USERPTR / DMABUF),是创建 vb2 环形队列、申请缓冲区的总入口。
抽象层: vb2 通过vb2_mem_ops适配不同内存分配方案 ,内核内置 3 套标准分配器,Camera业务统一使用vb2_dma_contig_memops
Camera标准底层: MEMORY_MMAP 模式依靠 dma_alloc_coherent从 CMA 申请物理连续 DMA 内存,组成环形缓冲队列
三种内存模式的底层申请逻辑
vb2_dma_contig_memops(默认常用):内存由内核驱动主动申请,用户态仅做 mmap 映射,不参与分配
申请链路:用户 REQBUFS(MEMORY_MMAP) → vb2 调用 vb2_dma_contig_alloc → dma_alloc_coherent → CMA 分配连续物理页 → 存入 vb2_buffer 私有结构,加入环形队列'
V4L2_MEMORY_DMABUF(多硬件零拷贝共享):缓冲区不由 vb2 主动分配,内存来自外部:ION/dma_heap/ 其他驱动导出的 dma_buf fd,REQBUFS 仅创建空队列;QBUF 时传入外部 dma_buf fd
V4L2_MEMORY_USERPTR:内存由用户态 malloc/mmap 提前分配,内核不主动申请;QBUF 时传入用户虚拟地址,vb2_mem_ops->get_userptr 固定用户内存、建立内核映射
2.DMA-BUF的内存物理设备是DMA还是DDR?它为啥能做到多进程共享?DMA-BUF是将CMA申请的物理内存打包成fd,用于跨进程跨硬件的数据共享
模块5:内核框架封装模块(V4L2/Media)
- Media 框架拓扑构建:Sensor → CSI TX → CSI RX → ISP → 输出节点
- V4L2 subdev 统一抽象,标准化控制接口(V4L2 ctrl)
- 设备树 DTS 解析模块:解析 Sensor 电源、时钟、lane、ISP 通路配置
- 平台驱动适配:probe/remove、资源释放、模块卸载
- 统一控制接口:曝光、帧率、分辨率、闪光灯通用 ioctl
模块6:多摄同步与调度模块(高端设备常用)
- 硬件同步触发(外部 FSYNC同步信号)
- 多 Sensor 时间戳对齐、PTP 时序同步
- 主副摄流水线调度、帧时序匹配
- 多路 ISP 资源分时复用管理
1.VSYNC和FSYNC有啥区别?
VSYNC:Sensor 拍完一帧自动告诉 SoC "这一帧结束了",是汇报信号;
FSYNC:SoC 统一下发命令 "现在全部相机同时开拍",是同步控制信号。
2.硬件同步触发的整体方案一般是什么样的?
硬件上每个sensor都接一个fsync gpio
- 驱动 streamon 启动两路 Sensor,全部配置为外部 FSYNC 触发模式,统一 HV 时序;
- 使能 SoC 同步发生器,每 33.3ms 输出一次 FSYNC 同步脉冲;
- FSYNC 脉冲同时到达主、副 Sensor TRIG 引脚,两路 Sensor 同步开始曝光积分;
- 曝光完成后,两路 Sensor 同步输出 MIPI FS 帧起始包(逻辑 VSYNC 同步);
- CSI 硬件捕获两路帧的高精度全局时间戳,附加到 vb2 buffer;
- 内核调度 ISP,基于时间戳匹配成对帧进行图像处理;
- 帧通过 dma_buf 传递至 Android HAL,Metadata 携带时间戳供上层算法对齐;
- 持续循环;streamoff 时关闭 FSYNC 脉冲发生器。
模块7:电源&时钟管理模块 - 稳定性关键
- 时钟树控制:MIPI 时钟、ISP 时钟、像素时钟动态开关 / 调频
- Regulator 电源控制:Sensor AVDD/DOVDD/IO 电压分级上电
- 低功耗管理:待机休眠、动态关闭闲置 IP、唤醒时序
- 过压 / 欠压保护、浪涌时序防 Sensor 烧坏
模块8:调试与工具模块
- 寄存器 dump、状态查询接口
- RAW/YUV 帧抓取接口、图像保存节点
- 帧率、丢帧、MIPI 错误统计节点(sysfs)
- 自动化测试接口、产线标定接口
- log 分级打印、异常故障上报
模块9:上层适配封装模块(交付客户)
- Linux 标准 V4L2 适配层(供 gstreamer/v4l-utils 使用)
- Android Camera HAL 封装(对接安卓 Camera Service)
- 原厂中间件(RKMedia/Allwinner VIN 等)
- 编码联动模块:ISP 输出直送 H.264/H.265 编码器
- NPU 预处理接口:RAW/YUV 数据送入 AI 处理器做检测
学习路线
- 先吃透 MIPI CSI-2 + Sensor 硬件时序;
- 掌握 Linux V4L2/Media 子系统、vb2、dma_buf;
- 熟悉 ISP 基础图像算法流程;
- 读懂 SoC 时钟、regulator、DTS 设备树;
- 原厂进阶:MIPI PHY 底层寄存器、多摄同步、低功耗、Android HAL 适配。
MIPI CSI-2 与Sensor硬件时序
基础核心概念 - 时序根基
1.角色划分
- Sensor(发送端 TX) :感光生成 RAW 图像,通过 MIPI D-PHY/CPHY 发送 CSI-2 数据包,输出 HS/VS 场同步信号;
- CSI Host/PHY(SoC 接收端 RX) :MIPI 物理层接收、解串、同步重建行场时序,送入 ISP;
- 同步链路两条:
- 数字同步:MIPI 包内嵌入 短包 FS/FE/LineStart/LineEnd (帧起始 / 帧结束 / 行起止);
- 硬件同步:Sensor 独立输出并行
HSYNC、VSYNC、PCLK(老式并口 Sensor,MIPI 模组基本废弃)。
1.HSYNC,VSYNC,FSYNC都是什么?有物理意义吗?
HS是行同步,标记单行像素的起始边界,相当于换行符
VS是帧同步,标记一帧图像的起始边界,相当于翻页符
FSYNC是外部帧同步触发信号,控制传感器什么时候开始曝光,有输入输出两种模式,输入就是作为帧触发,输出模式下可以 主摄像头 FSYNC_OUT → 副摄像头 FSYNC_IN,左右画面完全同步
2.MIPI D-PHY的两种工作模式(直接决定时序波形)
1.低功耗模式(Low Power)
- Lane 差分电平:LP00 / LP01 / LP10 / LP11
- 作用:待机、休眠、包间隔、传输同步序列、唤醒高速通道
- 时序特征:速率 MHz 级,边沿慢,功耗低
1.Lane的差分电平是什么意思?对应什么物理意义
就是说mipi是差分信号
2.HS高速传输模式(High Speed)
- 差分高速信号,用于传输图像 RAW 数据长包
- 速率典型:800Mbps~2.5Gbps/lane
- 进入 HS 流程:LP11 → LP01(唤醒)→ HS 同步码(0xB8)→ 有效数据
- 退出 HS:数据结束 → LP00 停止序列 → 返回 LP11 待机
3.CSI-2数据包与时序同步标记
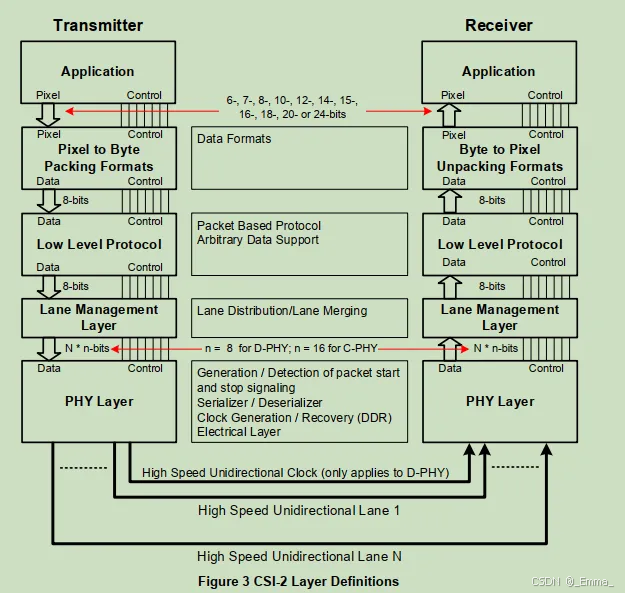
应用层( Application ):
发送端:输出原始图像像素数据、同步控制信号
接收端:接收还原后的完整像素与控制指令,交给ISP/显示模块处理
像素打包/解包层(Pixelpiksl Packing/Unpacking )
分离像素数据与控制信号,向下层输出标准8bit字节流
发送:把不同位宽的像素统一压缩封装为标准8bit字节流
接收:把8bit字节流还原回原始像素格式
底层协议层(Low Level Protocol)
将字节流变成协议数据包,基于数据包的传输协议,支持任意类型的图像/元数据
给像素字节流增加包头、包尾、检验等协议封装,实现分包传输、丢包校验
通道管理层(Lane Management Layer)
D-PHY单通道8bit,C-PHY单通道16bit
发送:把单路8bit并行数据拆分分发到多条高速Lane上
接收:合并条Lane的串行数据,恢复为完整8bit并行数据流
物理层(PHY)
串行/解串:并行bit转为高速差分信号传输,接收端恢复并行比特;
包起始/接收信号检测,时钟生成与时钟恢复
底层电气信号驱动,高速单向差分Lane传输
传输流程总结:
发送:像素 → 打包成 8bit 字节 → 协议封包 → 多通道分发 → PHY 串行差分发送
接收:PHY 解串 → 多通道合并 → 协议解包校验 → 字节还原像素 → 上层图像处理
CSI Packet分短包Short packet和长包Long Packet
(1)短包:同步时序核心(不携带图像像素)
| 短包类型 | 作用 | 时序意义 |
|---|---|---|
| FS Frame Start | 帧起始 | 一帧图像时序起点,Host 复位帧状态机 |
| FE Frame End | 帧结束 | 一帧全部数据传输完成 |
| LS Line Start | 行起始 | 单行像素开始 |
| LE Line End | 行结束 | 单行像素传输完毕 |
FS/FE 是整帧时序基准,丢 FS/FE 直接导致 Host 丢帧、花屏、时序错乱。
(2)长包:像素数据
承载 RAW8/RAW10/RAW12/RAW16/YUV 像素,每行图像对应 1 个或多个长包;
虚拟通道 VC:多摄共用一组 MIPI 时,用 VC 区分不同 Sensor 数据流。
4.Sensor内部图像时序 - 行场时序HV Timming
Sensor 寄存器配置四大时序参数,直接映射 MIPI 传输周期:
- Hactive(有效行像素宽度) :真实图像宽度,长包有效数据长度
- Hblank(行消隐) :每行有效像素后的空白时间,仅传输 LS/LE 短包,无像素
- Htotal = Hactive + Hblank
- Vactive(有效行数) :图像高度
- Vblank(场消隐) :一帧结束到下一帧 FS 之间的空白间隔
- Vtotal = Vactive + Vblank
时序周期公式:
帧率 FPS = PCLK / (Htotal × Vtotal)
关键点:Hblank/Vblank 不能过小,必须预留 MIPI LP-HS 切换时间、Host DMA 处理时间;消隐不足会出现行截断、错位花屏。
5.MIPI关键时序参数(D-PHY Spec硬件约束)
时序不满足会出现 CRC 错误、同步丢失、断帧,原厂调试高频踩坑点:
所有时序不满足会出现 CRC 错误、同步丢失、断帧,原厂调试高频踩坑点:
T_LPX:LP 状态最小保持时间(≥50ns),唤醒 / 停止序列必须满足T_HS_PREPARE:LP01 到 HS 启动间隔T_HS_ZERO:HS 差分 0 电平时长T_HS_SYNC:8bit 同步码发送窗口T_HS_TRAIL:数据包末尾 HS 尾序列T_EXIT:HS 切回 LP 的最小间隔- 时钟约束:MIPI lane 速率必须 ≥ 像素吞吐带宽,预留 20% 以上余量带宽计算公式:单像素 12bit、1920×1080@30fps:总比特率 = 1920×1080×30×12 bit/s均分 N lane 后,单 lane 速率必须大于计算值
6.上电/复位时序(硬件时序故障Top1)
Sensor 完整上电流程时序顺序,间隔有严格 ms/us 要求:
- 电源上电顺序:DOVDD(IO)→ AVDD(模拟)→ DVDD(数字)
- 禁止模拟电源先于 IO 上电,防止 Sensor IO 锁死、MIPI 输出异常
- 电源稳定延时:每路 regulator 上电后延时 1~5ms
- Sensor 复位 RST_N:
- 拉低复位 ≥ 10us,拉高后等待 10~50ms 内部 PLL 稳定
- I2C 初始化:复位稳定后才能读写寄存器
- MIPI 使能:I2C 配置好分辨率 / 时序后,Sensor 才输出 MIPI 数据流下电时序反向:关闭数据流 → RST 拉低 → 关 AVDD → 关 DOVDD/DVDD
时序间隔不足现象:I2C 无应答、MIPI 无波形、偶尔开机无图像。
时序常见硬件故障&根因
- 开机偶尔无图像,概率性 MIPI 无 HS 波形
- 复位延时不足、电源上电时序颠倒、regulator 上升沿过慢
- 画面横向错位、条纹花屏、半截图像
- Hblank 过小,MIPI 行切换来不及;PCLK 时序与 MIPI 速率不匹配
- 整帧撕裂、上下分两半画面
- Vblank 不足,前一帧 FE 未发送完,下一帧 FS 提前到来;Host 帧缓存溢出
- 频繁报 MIPI CRC/EC 错误、丢帧统计持续上涨
- MIPI 速率超硬件极限、差分走线阻抗不匹配、T_HS_ZERO 等 PHY 时序参数不达标
- 能抓到 FS 但无有效像素长包
- Sensor 时序寄存器配置错误,Hactive 设 0、binning 配置错乱
- I2C 读写间歇性失败,MIPI 同步丢失同步出现
- 电源纹波大,模拟电源噪声干扰 MIPI 和 I2C 时序
- 低帧率正常,高帧率花屏丢帧
- 带宽余量不足、H/V blank 预留太小、DMA 带宽瓶颈
分场景硬件时序调试经验
场景 1:上电复位 / 电源时序调试(万用表 + 示波器)
- 测量三路电源 AVDD/DVDD/DOVDD 上电先后顺序、上升沿、稳定电压
- 抓取 RST_N 波形,确认低电平复位时长、拉高后稳定延时
- 调试手段:
- 在 DTS 驱动中加大 regulator 等待延时、复位 us 延时;
- PMIC 调整电源驱动能力,降低纹波;
- 若上电时序颠倒,调整驱动内 regulator 上电顺序。
- 判断标准:所有电源达到额定电压后,再释放复位。
场景 2:MIPI D-PHY 波形时序合规性调试(高速差分探头示波器)
- 抓取完整一包波形:LP11 → LP01 唤醒 → HS 同步码 → 像素数据 → LP00 停止
- 测量关键时序参数 T_LPX / T_HS_PREPARE / T_HS_TRAIL 与 Spec 对比
- 常见优化手段:
- SoC CSI PHY 寄存器调整 HS 时序偏移参数;
- 降低 MIPI lane 速率,增加时序裕量;
- 硬件 PCB 优化差分阻抗 100Ω,减少串扰。
- 快速定位技巧:
- 持续出现 HS 同步码丢失 → T_HS_ZERO 参数过小;
- 数据包尾部大量错误 → T_HS_TRAIL 不足。
场景 3:Sensor HV 行场时序匹配调试(逻辑分析仪抓 MIPI 短包)
逻辑分析仪捕捉 MIPI 所有 FS/FE/LS/LE 短包,统计:
- 一帧内有效行数 Vactive 是否和寄存器配置一致;
- 每行 LS 到 LE 间隔是否等于 Hactive 对应数据长度;
- FE 到下一帧 FS 间隔是否满足 Vblank 消隐时间;调试优化方案:
- 增大 Sensor 寄存器 Hblank / Vblank(优先调大 20%);
- 降低 PCLK 像素时钟,减少单帧数据吞吐压力;
- Host 侧增加 CSI 接收 FIFO 深度,避免行数据溢出截断。
场景 4:带宽与时序匹配计算调试
- 先计算理论最小 MIPI 速率,预留≥20% 带宽余量;
- 若多 lane 方案,均分像素数据,避免单 lane 过载;
- 高分辨率 + HDR 多曝光场景,像素吞吐翻倍,必须同步放大 MIPI 速率或增加 lane 数量;
- 禁止极限速率跑量产,高温下 PHY 时序裕量收缩,极易批量花屏。
场景 5:多摄同步时序调试(双 / 多 Sensor)
- 硬件同步触发模式:外部 VSYNC 同步信号接入所有 Sensor;
- 调试要点:
- 所有 Sensor PCLK、MIPI 速率保持一致;
- 统一配置相同 Htotal/Vtotal,保证 FS 同时发出;
- 逻辑分析仪抓取两路 FS 时间戳,误差控制在 us 级;
- 异常:画面偏移、主副摄曝光不同步 → 各行场时序参数不一致。
软件驱动层面时序调优经验(芯片原厂驱动开发)
1.DTS 设备树时序相关配置项规范
plain
sensor@1a {
/* 电源时序 */
avdd-supply = <®_avdd>;
dvdd-supply = <®_dvdd>;
dovdd-supply = <®_dovdd>;
power-on-delay-us = <2000>; // 电源稳定延时
reset-gpios = <&gpio RST GPIO_ACTIVE_LOW>;
reset-delay-us = <50000>; // 复位释放等待时间
/* MIPI PHY时序配置 */
mipi-lanes = <4>;
mipi-rate = <1500000000>;
/* PHY时序偏移寄存器参数 */
hs-trail = <32>;
hs-zero = <16>;
/* Sensor HV时序基准 */
hactive = <1920>;
vactive = <1080>;
hblank = <320>;
vblank = <120>;
pclk = <148500000>;
};1.详细注释以上设备树,并实际找个树莓派的Camera相关设备树,分析一下
2. Sensor 驱动时序寄存器适配要点
- 驱动内做时序参数合法性校验:Hblank/Vblank 最小值保护,避免客户配置过小;
- 切换分辨率 / 帧率时,先关闭 MIPI 数据流,重新加载整套 HV 时序寄存器,禁止动态修改;
- HDR 多曝光模式:多组曝光行数会改变 Vtotal,同步更新 Vblank 保证帧间隔稳定;
- 增加 sysfs 节点导出当前 H/V total、MIPI 错误计数、FS/FE 丢失统计,用于量产调试。
3. CSI Host 接收侧时序容错配置
- 打开 Host 端 FS 同步保护:未收到 FS 直接丢弃缓存,防止错乱帧送入 ISP;
- 配置硬件 FIFO 溢出保护中断,上报行截断时序异常;
- 开启 MIPI CRC 校验中断,统计实时误码率,超过阈值主动降速。
量产稳定性时序调试核心技巧
- 高低温拷机时序验证
- 低温:PHY 建立时间变长,容易同步丢失,适当放大 T_HS_ZERO、增加 blank;
- 高温:MIPI 高速信号裕量收缩,降低 lane 速率做老化验证。
- 长时间录像压测监控三个指标:MIPI CRC 错误计数、丢帧率、FS/FE 丢失次数,持续增长代表时序裕量不足。
- 量产测试标准
- 上电 1000 次无概率性无图像;
- 高低温全帧率无花屏、单小时误码率为 0;
- FE 到 FS 间隔稳定,无时序漂移。
- 时序问题优先级排查顺序电源复位时序 → MIPI PHY 波形合规性 → Sensor HV blank 参数 → 带宽余量 → Host FIFO 与 DMA 调度。
速查排错清单
- 无 MIPI HS 波形复位延时不足 / 上电时序颠倒 / I2C 时序寄存器未配置
- 有波形但画面横向条纹Hblank 太小 / PCLK 与 MIPI 速率不匹配 / T_HS_TRAIL 时序不足
- 上下画面撕裂Vblank 不足 / 帧缓存过小 / 前帧 FE 未完成新 FS 到来
- 高帧率丢帧严重带宽不足 / MIPI 速率接近极限 / V/H blank 预留不足
- 多摄画面错位不同步两组 Sensor H/V total 不一致、缺少硬件同步触发信号
Linux V4L2 +Media子系统+ vb2 +dmabuf完整知识与调试经验
整体架构总览
Camera 完整内核链路:
Sensor subdev → CSI PHY/CSI Host subdev → ISP subdev → V4L2 video设备 → vb2缓冲区管理 → dma_buf 跨设备共享
Media 子系统负责 拓扑链路管理 ,V4L2 是标准视频控制接口,vb2 统一管理帧缓冲队列,dma_buf 实现内核缓冲区跨驱动 / 用户态共享。
层级分工
- Media:拓扑、pad 链路、子设备绑定、链路开关
- V4L2:视频标准 ioctl、控制参数、格式裁剪、捕获输出设备
- vb2:环形 buffer 队列、分配 / 排队 / 出队、硬件 DMA 同步、等待帧中断
- dma_buf:物理连续内存导出、fd 共享、缓存同步、多硬件共享帧(ISP / 编码 / NPU / 显示)
v4l2的核心知识点
1. 设备类型
/dev/v4l-subdevX:子设备(Sensor、MIPI CSI、ISP 硬件流水线),只做硬件配置,不输出帧缓存/dev/videoX:主视频设备,提供捕获 / 输出接口,上层应用(v4l-utils/gstreamer/Android HAL)操作节点- V4L2_BUF_TYPE_VIDEO_CAPTURE:摄像头采集输入(Camera 最常用)
- V4L2_BUF_TYPE_VIDEO_OUTPUT:显示 / 编码输入
- V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE:多平面(NV12/NV21 分开 Y/UV 平面);
2. 核心数据结构
struct v4l2_subdev
所有硬件模块统一抽象:Sensor、MIPI PHY、CSI 控制器、ISP 都基于 subdev
核心操作 ops:
s_stream:开 / 关数据流(streamon/streamoff 底层)set_fmt:设置 pad 端口图像格式(RAW8/RAW10/NV12、宽高、位深)get_selection/set_selection:裁剪、缩放、有效区域g_ctrl/s_ctrl:3A、增益、曝光、帧率等控制参数ioctl:自定义寄存器调试接口
struct v4l2_ioctl 关键命令(上层必走流程)
VIDIOC_QUERYCAP:查询设备能力VIDIOC_S_FMT:设置输出图像格式(多平面 mplane)VIDIOC_REQBUFS:申请 vb2 缓冲区(MMAP/USERPTR/DMABUF),这里只传buffer数量,具体buffer大小由驱动根据S_FMT进行分配VIDIOC_QUERYBUF:查询 buffer 物理 / 虚拟地址、长度(除了DMA_BUF,使用mmap的时候必用,因为mmap需要QUERYBUF出来的buf.m.offset和buf.length)VIDIOC_QBUF:buffer 入队,交给硬件填充图像VIDIOC_DQBUF:取出已填充完成的帧VIDIOC_STREAMON / STREAMOFF:启动 / 停止采集VIDIOC_EXPBUF:将 buffer 导出为 dma_buf fd
3. 图像格式关键概念
- MIPI 前端:RAW8/RAW10/RAW12/RAW16 单平面
- ISP 输出:NV12/NV21/YUV420M 多平面
- 色彩域、量化范围(full range/limited range)、crop/compose
- crop:硬件裁剪源图像(ISP 内部裁剪)
- compose:输出缩放尺寸,最终给到用户的分辨率
1.单平面和多平面有啥区别?
单平面指一帧画面所有像素数据,全部连续存放在同一块物理内存缓冲区;( buf.offset0; buf.m.length;)Y、UV 数据前后拼接在同一片内存;
多平面指一帧画面拆分为多个完全独立、不连续的物理内存缓冲区(平面 plane);Y 亮度、UV 色度分别存在两块不同内存,互不连续( buf.m.planes0.m.offset ; buf.m.planes0.length;)。
4. V4L2 四种 buffer 内存模式
- V4L2_MEMORY_MMAP :内核分配物理内存,mmap 映射到用户态,Camera 默认
- V4L2_MEMORY_USERPTR :用户态 vmalloc 虚拟内存(极少用于 Camera,DMA 不友好)
- V4L2_MEMORY_DMABUF :外部传入 dma_buf fd(编码、NPU 共享帧)
- V4L2_MEMORY_OVERLAY :老式显示 overlay,Camera 不用
1.DMABUF跨进程更友好,为什么v4l2默认使用mmap呢?
mmap和dma_buf是协作的关系,dma_buf通过fd将内存数据跨进程,跨硬件共享出去,如果应用需要获取某个硬件的帧数据,则通过系统调用mmap将dma_buf中的物理内存映射到用户态去
mmap :内核内存映射系统调用,解决「单进程 CPU 直接读相机帧」,简单高速,但不能跨硬件共享;
dma_buf :内核共享内存框架,以 fd 为媒介,实现相机帧零拷贝流转给编码器、GPU、NPU 等多硬件,是 Android / 高端多媒体标准
二者可组合使用:dma_buf 负责硬件互通,mmap 负责 CPU 临时查看图像
MEMORY_MMAP 流程
- open /dev/video0
- REQBUFS (MEMORY_MMAP) → CMA 分配 buffer
- mmap (v4l_fd) 映射到本进程虚拟地址
- QBUF → STREAMON,DMA 填充
- DQBUF 直接读取映射指针画面
- 仅当前进程可用,无法交给编码器
MEMORY_DMABUF 导出流程
- open /dev/video0
- REQBUFS(MEMORY_MMAP)
- VIDIOC_EXPBUF → 获取 dma_buf fd
- sendmsg (fd) 传给编码器进程
- 编码器驱动 attach fd,拿到 DMA 物理地址,直接硬件编码
- 本进程如需 CPU 查看,再对 dma_buf fd 执行 mmap + 同步 ioctl
生命周期与资源释放
- mmap:关闭 video 设备 fd,映射自动失效,buffer 归还 vb2;
- dma_buf:所有持有 fd 的进程全部 close、所有驱动 detach 完成,refcount 归 0 才释放 CMA;易出现内存泄漏场景:某进程持有 dma_buf fd 未关闭,CMA 内存永久占用。
适用场景对照表
优先选 mmap(不需要考虑cache一致性问题)
- 单进程本地采集、仅 CPU 图像处理;
- 无编码、无显示、无 NPU 硬件联动;
- 调试工具 v4l2-ctl、裸机简易相机程序;
- 不需要多流并发、追求 CPU 读取速度。
必须选 dma_buf
- Android Camera HAL3、多媒体多硬件流水线;
- 预览 + 录像 + AI 抓拍多路并发;
- 帧数据需要送入编码器、DRM 显示、NPU 推理;
- 多进程架构、低内存设备,需要内存复用;
- 双摄同步、实时后期算法硬件加速场景。
mmap :内核内存映射系统调用,解决「单进程 CPU 直接读相机帧」,简单高速,但不能跨硬件共享;
dma-buf: 内核跨设备内存共享框架,依托 fd 传递实现「多进程、多 DMA 硬件零拷贝共享相机帧缓存」,支持硬件互通流转,但 CPU 直接访问存在缓存同步开销、读取速度慢,必须手动做 Cache 同步。
5.v4l2-async机制
V4L2 异步子设备匹配框架,屏蔽 CSI/ISP 与 Sensor 驱动加载顺序差异,自动完成主设备与子设备配对,全部硬件就绪后才完整构建媒体流水线、生成 /dev/video 设备节点
1.子设备端(Sensor/IR-Cut):异步注册自己
Sensor 驱动 probe 末尾调用:v4l2_async_register_subdev(sd);
把当前v4l2_subdev注册进全局异步子设备链表,标记「我是一个待匹配的子设备」,就算主 CSI 还没加载也不会直接报错退出
2.主桥设备端(CSI/ISP):注册异步监听通知器 notifier
CSI/ISP 驱动解析 DTS port/endpoint 远程节点,生成v4l2_async_subdev匹配描述符,注册监听:v4l2_async_notifier_register(v4l2_dev, notifier);
向内核声明「我需要匹配 DTS 里描述的若干子设备」,框架持续等待对应子设备注册进来
notifier 提供 3 个生命周期回调,驱动在对应阶段完成硬件初始化、media 链路搭建:
bound(subdev)
单个子设备匹配成功触发,做单设备资源初始化(上电、复位、I2C 基础配置)。
unbind(subdev)
子设备卸载 / 匹配失效,反向释放资源。
complete ()【最重要】
所有 DTS 要求的子设备全部匹配完成后才执行。
这里统一做:构建 media pad 链路、初始化 vb2、创建/dev/videoX、3A 通路初始化;
只要缺少任意一个子设备,complete 永远不会执行,不会生成残缺的视频设备节点。
6.V4L2获取Metadata方法
帧内置轻量元数据:v4l2_buffer 自带字段(时间戳、帧标志、timecode),开箱即用
硬件统计/3A/ISP 大数据元数据:
1.独立 Metadata 采集节点 V4L2_BUF_TYPE_META_CAPTURE,与图像帧一一对应同步输出(标准内核接口,主流)
1.1打开独立 Metadata 设备 /dev/video1(图像是/dev/video0);
1.2设置元数据格式(V4L2_META_FMT_UVC/ 厂商自定义 META 格式);
1.3VIDIOC_REQBUFS申请 meta 缓冲区,mmap 映射;
1.4STREAMON启动元数据流,与图像流同步;
1.5循环VIDIOC_DQBUF取出元数据 buffer,解析统计 / 3A 信息;
1.6与图像帧通过相同 timestamp做帧配对。
2.多平面视频帧,Metadata 作为额外 plane 随图像帧同步输出(高通 / 瑞芯微 SoC Camera 主流)
2.1 S_FMT 设置多平面像素格式,驱动定义 metadata 平面索引与大小;
2.2 REQBUFS 分配多平面缓冲区(底层 dma-contig CMA 内存);
2.3 STREAMON 启动采集;
2.4 DQBUF 出队 buffer 后,直接访问planes1的内存:
7.v4l2热插拔方案
Sensor/CSI/USB 相机硬件上电 / 拔出时,驱动识别硬件状态变化,向内核设备模型发送 uevent;udev/systemd 捕获事件创删 /dev/videoX,上层应用通过inotify 或 libudev 监听设备节点变化。
因为MIPI 物理总线无原生热插拔检测,依靠GPIO 检测 Sensor 供电 / 模组在位引脚实现,搭配 v4l2-async 框架完成动态绑定解绑,完整四层实现:
1.检测Camera模块拔掉/插入
模组插上 / 拔掉时,会改变检测 GPIO 引脚的电平高低,CPU 通过读取电平判断模组是否存在
比如:下拉检测(模组自带上拉电阻,最常用)
1.SoC 端 GPIO 配置:内核把这个引脚设置为内部下拉(GPIO_ACTIVE_LOW);
2.模组端硬件:模组 FPC 排线内部,在位引脚接一颗上拉电阻到模组供电 VDD;
模组未插入:FPC 断开,SoC 引脚只有内部下拉 → 电平 = 低电平;
模组完全插入:FPC 导通,模组上拉电阻接管引脚 → 电平 = 高电平;
CPU 读 GPIO 值:高 = 有模组,低 = 无模组。
2.内核驱动底层实现
(1) GPIO中断检测硬件在位状态
Sensor 驱动 DTS 定义 det-gpio 中断:
plain
sensor@1a {
compatible = "xxx,imx390";
reg = <0x1a>;
det-gpios = <&gpio1 5 GPIO_ACTIVE_LOW>; // 在位低电平
pinctrl-det = <&det_default>;
vana-supply = <&cam_vana>;
};驱动 probe 中申请 GPIO 双边沿中断:
plain
// 中断回调:模组插入/拔出触发
static irqreturn_t sensor_det_irq(int irq, void *priv)
{
struct sensor_dev *s = priv;
bool present = gpio_get_value(s->det_gpio) == 0;
if (present)
schedule_work(&s->hotplug_work); // 插入:上电、重新async匹配
else
schedule_work(&s->hotplug_remove_work); // 拔出:断电、销毁v4l2设备
return IRQ_HANDLED;
}必须用 workqueue 下半部:中断上下文不能操作 I2C、电源、v4l2 设备销毁。
(2)模组插入流程(hotplug_work)
1.使能 PMIC 供电,等待电源稳定;
2.I2C 读取 Sensor ID,确认模组有效;
3.调用 v4l2_async_register_subdev() 重新注册子设备;
4.v4l2-async notifier 匹配 CSI 主设备,执行 complete 回调;
5.完整构建 media 拓扑、创建 /dev/videoX;
6.内核自动发送 add 类型 uevent,通知用户层。
(3)模组拔出流程(hotplug_remove_work)
1.停止 CSI stream,等待 DMA 全部结束;
2.取消 v4l2-async 子设备注册 v4l2_async_unregister_subdev();
3.销毁 v4l2_subdev、释放 vb2 缓冲、销毁 media entity;
4.切断 Sensor 电源,复位 MIPI PHY;
5.内核发送 remove uevent,udev 删除 /dev/videoX 节点。
8.V4L2 典型故障现象
- S_FMT 失败:格式不支持、ISP 输出通道位深不匹配、宽高对齐不满足硬件要求(如 32/16 对齐)
- REQBUFS 失败:CMA 内存耗尽、缓冲区数量超过硬件支持上限
- DQBUF 阻塞无返回:硬件未产生帧中断、MIPI 无数据、CSI 同步丢失
- 图像色彩异常、错位:crop/compose 配置冲突、多平面 plane stride 设置错误
Media子系统的核心知识点
1. 核心作用
管理整个 Camera 硬件拓扑,描述:subdev + pad + link
- subdev:硬件模块(Sensor/CSI/ISP)
- pad:每个子设备的输入输出端口(Sink 输入 Pad,Source 输出 Pad)
- link:两个 pad 之间的数据流通路(Media 链路)
2. 拓扑结构示例
plain
sensor subdev: source pad0 → CSI host sink pad0
CSI host source pad0 → ISP sink pad0
ISP source pad0 → video capture device3. 关键 API 与命令
用户态工具 media-ctl
media-ctl -d /dev/media0 -p打印完整拓扑、pad 信息media-ctl -l "'sensor':0 -> 'csi':0[1]"使能链路media-ctl -V "'sensor':0 [fmt:SGRBG10_1X10/1920x1080]"设置 pad RAW 格式
内核驱动 API
media_entity_pads_init():初始化子设备输入输出 padmedia_create_pad_link():创建两个 subdev 之间的链路media_entity_setup_link():启用 / 禁用 linkv4l2_async_register_subdev():异步注册 sensor(设备树匹配标准方案)
4. Media 子系统开发关键点
- 数据流必须先打开 link,再 STREAMON;不打开 link 会无帧、DQBUF 卡死
- 多通路、多摄场景:多组独立 link 拓扑,互不干扰
- 链路格式一致性:前一级 source pad 格式必须匹配后一级 sink pad,否则 ISP 输出乱帧
- 异步框架 v4l2-async:Sensor 驱动与 CSI/ISP 驱动解耦,设备树标准写法
5.Media 典型问题
- media-ctl 看不到完整拓扑:subdev 未注册、pad 初始化失败
- 打开 link 报错:pad 编号错误、link 重复创建
- 能开 stream 但无图像:link 状态为 disable,忘记使能链路
- 切换分辨率花屏:链路两端 fmt 没有同步更新
vb2缓冲管理子系统 - v4l2标准的buffer框架
1.vb2定位
屏蔽不同内存类型(MMAP/DMABUF/USERPTR)差异,统一实现环形队列、硬件 DMA 同步、中断处理、内存分配释放。
所有 /dev/video捕获设备都基于 vb2。
2. 核心结构 vb2_queue
每个 video 设备对应一个 vb2 队列,包含:
- 环形 buffer 数组(vb2_buffer)
- 等待队列(dqbuf 阻塞等待帧完成)
- 内存分配回调 ops(vb2_mem_ops)
- 硬件设备回调 ops(vb2_ops,驱动必须实现)
3.驱动必须实现 vb2_ops 回调(原厂 Camera 驱动核心)
c
struct vb2_ops {
// buffer入队后,硬件准备开始采集一帧
int (*queue_setup)(struct vb2_queue *q, unsigned int num_buffers);
void (*buf_queue)(struct vb2_buffer *vb);
// 硬件填充完成一帧,驱动调用vb2_buffer_done()通知vb2
// streamon/streamoff硬件启停
int (*start_streaming)(struct vb2_queue *q, unsigned int count);
void (*stop_streaming)(struct vb2_queue *q);
// buffer回收、内存释放
void (*buf_cleanup)(struct vb2_buffer *vb);
};数据流流程:
- 用户调用 QBUF → vb2 调用 buf_queue 把 buffer 交给 CSI/ISP DMA
- Sensor 输出一帧,硬件产生帧中断
- 中断服务函数判断当前 buffer 填充完成,调用
vb2_buffer_done(vb, VB2_BUF_STATE_DONE) - 唤醒 dqbuf 等待队列,用户态 DQBUF 拿到图像
4. vb2 三种内存分配模式
- vb2-dma-contig :CMA 物理连续内存(Camera MMAP 模式首选)
- vb2-dma-sg:分散散射列表(非连续,ISP 很少用)
- vb2-dma-buf:对接外部 dma_buf 共享缓冲区
5.vb2关键机制
环形队列状态机
- QUEUED:buffer 入队,等待硬件填充
- DONE:帧填充完成,可 DQBUF
- ERROR:帧异常(丢帧、MIPI 错误)
缓冲区数量
REQBUFS 申请 n 个 buffer 形成环形池,一般 4~8 个;buffer 太少容易丢帧,太高占用大量 CMA 内存。
6.vb2高频故障与根因
- DQBUF 永久阻塞:
- 帧中断未触发(MIPI 无数据、CSI 同步丢失、stream 未真正启动)
- 中断函数没有调用 vb2_buffer_done
- streamon 失败:queue_setup 分配 CMA 内存失败
- 随机丢帧、buffer 状态 ERROR:
- MIPI CRC 错误、FIFO 溢出、V/H blank 时序不足
- 中断上报延迟,buffer 被覆盖
- 退出 stream 崩溃:stop_streaming 未等待 DMA 完成,直接释放 buffer
dma_buf子系统 - 跨设备内存共享核心
1.作用
实现一块物理内存在:V4L2 Camera、H264/H265 编码器、NPU、显示 DRM、用户态 APP 之间零拷贝共享。
核心:导出 fd,各驱动通过 fd 获取同一块物理页面,避免多次拷贝。
2.核心概念
- struct dma_buf:一块共享缓冲区内核对象
- dma_buf fd:用户态可传递的文件句柄
- dma_buf_attachment:某个硬件设备附着到这块 buffer
- sg_table:该 buffer 物理内存散列表,供 DMA 控制器访问
3.两条典型的使用路径
路径1:Camera 导出 dma_buf 给编码 / NPU(EXPORT)
- vb2 分配 CMA 连续 buffer
VIDIOC_EXPBUF将 vb2 buffer 导出为 dma_buf fd- APP 将 fd 传递给编码器 / NPU 驱动
- 编码驱动通过 fd 导入 dma_buf,直接 DMA 读取图像,无拷贝
路径2:外部 dma_buf 传入 Camera 采集(IMPORT)
- APP 提前分配 dma_buf(如 ION/CMA)
- REQBUFS 指定 MEMORY_DMABUF,传入 fd
- vb2 将外部 buffer 交给 CSI/ISP DMA 填充图像
4.缓存同步(可能导致花屏的原因)
ARM 架构存在 CPU Cache 与设备 DMA Cache 一致性问题:
dma_buf_begin_cpu_access():CPU 要读帧前,invalidate cache(刷新硬件数据到 CPU)dma_buf_end_cpu_access():CPU 写完后,flush cache(把 CPU 数据刷到物理内存供硬件读取)
Camera 场景:硬件 DMA 写完帧,用户态 mmap 读取前必须做 invalidate,否则读取到旧脏数据、色块、条纹花屏。
5.dma_buf开发API
c
// 导出vb2 buffer生成dma_buf
struct dma_buf *vb2_dma_buf_export(struct vb2_buffer *vb);
// 根据fd获取dma_buf
struct dma_buf *dma_buf_get(int fd);
// 将buffer绑定到硬件DMA设备
struct dma_buf_attachment *dma_buf_attach();
// 获取物理DMA地址sg_table
struct sg_table *dma_buf_map_attachment();
// 解绑定、释放
dma_buf_unmap_attachment();
dma_buf_detach();
dma_buf_put();6.dma_buf的典型问题
- 共享画面花屏、色块:缺少 cache 同步操作(begin/end_cpu_access)
- 内存泄漏:dma_buf_get 后没有配对 dma_buf_put,fd 未 close
- DMA 传输报错:buffer 物理地址不连续、硬件不支持散列表
- 多进程共享失效:没有正确管理 fd 生命周期
SOC Camera平台CSI/ISP Platform驱动完整开发流程
前置基础概念
1.最底层独立硬件模块: v4l2_subdev(Sensor,MIPI-DPHY,ISP等)
2.平台硬件总控制器:platform_driver(CSI接收控制器,载体)
3.V4l2底层容器:struct v4l2_device(所有 subdev 最终聚合在这里,由 platform 控制器驱动持有)
4.图像输出节点:video_device(挂载在 v4l2_device 下,给用户空间出流)
5.媒体框架:media_device 依附 v4l2_device,管理 subdev 链路拓扑
platform_driver(CSI 控制器)内部实例化 v4l2_device,所有 subdev、video_device 全部聚合到这个 v4l2_device 下统一管理。
完整开发顺序
阶段1:先写所有独立子模块 v4l2_subdev(最先开发)
所有硬件功能单元单独拆成 subdev 驱动,互不依赖,可单独调试:
1.1 Sensor 子驱动(你前面提到的 Sensor subdev)
数据结构:struct v4l2_subdev_ops + struct i2c_driver实现内容:
- I2C 寄存器读写、上电时序 regulator/clk/gpio
- 分辨率 / 帧率 / HDR/Binning 配置
- 曝光、模拟 / 数字增益、行长
- OTP/EEPROM 读取、3A 参数接口
- 帧中断处理注册方式:
v4l2_async_register_subdev()异步注册,等待 CSI 控制器匹配
1.2 MIPi D-PHY/CSI接受subdev(MIPI硬件控制器)
数据结构:struct v4l2_subdev_ops + platform_driver
实现:MIPI Lane 配置、HS/LP 时序、CRC 校验、帧同步 FS/FE、MIPI 中断、lane 错误处理
1.3 ISP图像处理subdev
数据结构:struct v4l2_subdev_ops + platform_driver
实现:去拜耳、降噪、HDR 融合、LSC、Gamma、色彩矩阵、硬件 3A 统计
顺序逻辑:subdev 是最小功能单元, 必须最先写完 ,后面平台控制器只是做聚合、链路管理、DMA 输出。
阶段 2:编写 Camera 总控制器 platform_driver(链路主体)
CSI/VI 顶层硬件是 platform 设备,DTS 中 soc/csi@xxx节点对应这个驱动, 这是整条链路的载体 。
2.1 自定义平台私有结构体(以树莓派为例)
c
struct cfe_device {
struct dentry *debugfs;
struct kref kref;
/* V4l2 specific parameters */
struct v4l2_async_connection *asd;
/* peripheral base address */
void __iomem *mipi_cfg_base;
struct clk *clk;
/* V4l2 device */
struct v4l2_device v4l2_dev;
struct media_device mdev;
struct media_pipeline pipe;
/* IRQ lock for node state and DMA queues */
spinlock_t state_lock;
bool job_ready;
bool job_queued;
/* parent device */
struct platform_device *pdev;
/* subdevice async Notifier */
struct v4l2_async_notifier notifier;
/* ptr to sub device */
struct v4l2_subdev *sensor;
struct cfe_node node[NUM_NODES];
DECLARE_BITMAP(node_flags, NUM_STATES * NUM_NODES);
struct csi2_device csi2;
struct pisp_fe_device fe;
int fe_csi2_channel;
};关键点:
struct v4l2_device v4l2_dev嵌入私有结构体,全链路所有设备最终聚合到此video_device、media_device都依附这个 v4l2_dev
2.2 platform_driver标准三接口
1.probe:硬件初始化(寄存器映射、时钟、复位、中断、DMA)
2.remove:反初始化,释放资源
3.shutdown : 关机断电
阶段 3:probe 内部执行顺序(代码执行流程,从初始化到聚合完成)
Step1:硬件底层资源初始化(先硬件,后 V4L)
解析 DTS:reg、clk、reset、irq、dma、gpio
ioremap 寄存器基地址
使能时钟、解除硬件复位
申请中断、DMA 通道
Step2:初始化聚合核心 ------v4l2_device(整条链路总入口)
c
struct soc_csi_dev *csi = dev_get_drvdata(&pdev->dev);
/* 1. 初始化v4l2_device,这是聚合根 */
v4l2_device_init(&csi->v4l2_dev, &pdev->dev);
csi->v4l2_dev.media_dev = &csi->media_dev;
/* 2. 初始化media_device,绑定到v4l2_dev */
media_device_init(&csi->media_dev);
csi->media_dev.dev = &pdev->dev;
media_device_register(&csi->media_dev);此时:v4l2_device 作为顶层容器创建完成,后续所有 subdev、video 设备都挂载它。
Step3:初始化 vb2 缓冲队列(用户空间图像缓存管理)
实现vb2_ops,负责 DMA buffer 分配、映射、回收,供 video_device 使用。
Step4:初始化 video_device(/dev/videoX 输出节点)
c
video_device_init(&csi->vdev);
csi->vdev.v4l2_dev = &csi->v4l2_dev; // 绑定到聚合根v4l2_dev
csi->vdev.queue = &csi->queue;
csi->vdev.fops = &soc_csi_fops; // open/read/stream/mmap
video_register_device(&csi->vdev, VFL_TYPE_VIDEO, -1);绑定关系:video_device -> v4l2_device,完成第一层聚合。
Step5:异步匹配所有 subdev(Sensor/MIPI/ISP 全部聚合进 v4l2_dev)
- 控制器调用
v4l2_async_notifier_init()创建异步通知器 - 根据 DTS
port/endpoint解析链路,添加 subdev 匹配列表 v4l2_async_register_notifier()等待 subdev 就绪- 回调
complete函数:所有 subdev 全部匹配成功后执行- 保存 subdev 指针到私有结构体
- 创建 media_graph 链路(media_create_pad_link)
- 校验整条 Pipeline 通路
关键聚合动作 :所有 subdev 注册后,内核会自动加入 v4l2_dev->subdevs 链表,全部聚合到同一个 v4l2_device 下。
Step6:注册 platform 驱动、填充硬件操作回调
填充 struct platform_driver,.probe = soc_csi_probe,module_platform_driver 注册。
阶段 4:链路运行时数据流控制(聚合后的统一调度)
上层 ioctl 调用路径:
/dev/videoX -> video_device -> v4l2_device -> 遍历内部subdev链表
例:设置分辨率时,v4l2_dev 统一下发参数给 sensor subdev、dphy subdev、isp subdev。
整体开发先后顺序总结(从先写到最后聚合)
- 最先开发:各个独立 v4l2_subdev 驱动Sensor (i2c_driver)、MIPI DPHY、ISP (platform_driver),单独编译调试
- 中间开发:总控制器 platform_driver 定义私有结构体,内嵌
struct v4l2_device(聚合根) - probe 内初始化顺序硬件资源 → v4l2_device(聚合根创建)→ media_device → vb2 队列 → video_device → 异步绑定所有 subdev
- 最终聚合点:struct v4l2_device
- 所有 subdev 挂在它的 subdev 链表
- video_device 依附它
- media_device 依附它整条 Camera 链路所有软硬件模块全部聚合在这一个结构体下管理
极简层级结构图
plain
platform_driver(CSI控制器硬件)
└── 私有结构体 cfe/camss
└── struct v4l2_device v4l2_dev ←【全局聚合根】
├── media_device 媒体拓扑
├── video_device (/dev/videoX 出流)
└── subdevs 链表:
├─ sensor v4l2_subdev
├─ mipidphy v4l2_subdev
└─ isp v4l2_subdev补充关键避坑点
- 不能反过来:不能在 subdev 里创建 v4l2_device,v4l2_device 只能由顶层平台控制器(比如树莓派的cfe,高通的camss)创建;
- subdev 是异步注册,必须依赖 platform 控制器的 v4l2_async_notifier 完成聚合;
- 所有电源、时钟、中断顶层统一放在 platform 驱动,subdev 只管理自身模块时序;
- media graph 链路必须在 subdev 全部匹配完成后创建,链路节点全部归属同一个 v4l2_device。
驱动全套调试工具
1.media-ctl拓扑调试
plain
# 查看media设备拓扑、pad、link状态
media-ctl -d /dev/media0 -p
# 使能通路
media-ctl -l "'ov13850':0 -> 'csi-host':0[1]"
# 设置sensor RAW格式
media-ctl -V "'ov13850':0 [fmt:SGBRG10/1920x1080]"2.v4l-utils采集测试
plain
# 最简单采集保存RAW
v4l2-ctl -d /dev/video0 --stream-mmap --stream-to=frame.raw --stream-count=10
# 查看当前fmt、crop、compose
v4l2-ctl --get-fmt-video
# 查看buffer队列状态
v4l2-ctl --querybuf 0
# 打印所有v4l2 ctrl(曝光、增益、帧率)
v4l2-ctl --list-ctrls3.内核日志打印
plain
# 实时打印camera相关log
dmesg -w | grep -E "sensor|csi|isp|vb2|dma_buf|mipi"
# 打开子设备调试打印
echo 0xffff > /sys/class/video4linux/v4l-subdev0/debug4.sysfs状态节点(原厂驱动必加)
常规导出节点:
- 丢帧计数、MIPI 错误统计
- vb2 buffer 队列状态(queued/done/error 数量)
- dma_buf 引用计数、cache 同步调用次数
- media link 使能状态、pad 格式
5.ftrace追踪数据流
追踪 vb2 buffer 入队、中断、dma_buf 操作耗时,定位卡顿丢帧:
plain
echo vb2:* > /sys/kernel/debug/tracing/set_event
echo dma_buf:* >> /sys/kernel/debug/tracing/set_event
cat /sys/kernel/debug/tracing/trace1.ftrace的原理是啥?
6.ION/CMA内存查看
plain
# 查看CMA剩余内存
cat /proc/meminfo | grep CMA
# 查看dma_buf全局引用
ls /sys/kernel/debug/dma_buf/分模块经典调试经验与排错流程
1.无图像、DQBUF卡死排查顺序
- media-ctl 检查 link 是否打开,前后 pad 格式是否匹配
- dmesg 查看 MIPI 是否有 HS 波形、CRC 错误、帧中断是否产生
- 确认 streamon 成功,start_streaming 无返回错误
- 检查中断服务函数是否调用
vb2_buffer_done - 查看 CMA 内存是否耗尽,REQBUFS 是否分配成功
2. 画面花屏 / 色块(dma_buf cache 同步高频坑)
- 读取帧前必须调用
dma_buf_begin_cpu_access(DMA_FROM_DEVICE)invalidate cache - 禁止跳过同步直接 mmap 读取,尤其多平面 YUV
- 确认 ISP 输出 stride/bytesperline 与用户态解析一致
- 多平面 plane 偏移配置错误会出现竖条纹
3. 随机丢帧、buffer ERROR 状态
- 增大 Sensor Hblank/Vblank,提升 MIPI 时序裕量
- 增加 vb2 buffer 数量(从 4 个改为 6~8 个)
- 查看 dmesg MIPI 溢出、FIFO full 报错
- 降低帧率或 MIPI 速率,减少硬件吞吐压力
4. CMA 分配失败、REQBUFS 返回 - ENOMEM
- DTS 增大 cma reserved 内存大小
- 降低单帧 buffer 尺寸、减少 buffer 个数
- 检查开机其他驱动占用大量 CMA(显示、编码)
- 流式释放不用的 dma_buf,避免内存泄漏
5. 多摄 / 多通路共享 dma_buf 内存泄漏
- 每一次 dma_buf_get 必须配对 dma_buf_put
- streamoff 时遍历所有 buffer,关闭 fd、释放 attachment
- ftrace 追踪 dma_buf_ref 计数,定位未释放 buffer
6. 切换分辨率后画面错乱
- STREAMOFF 停止采集,清空 vb2 队列
- 重新更新 media 链路两端 pad fmt
- 重新 REQBUFS 分配匹配新分辨率大小的 buffer禁止动态 S_FMT 不停止 stream,会导致 vb2 buffer 尺寸不匹配
7. 低功耗休眠唤醒后无图像
- 唤醒后重新重建 media link
- 重新初始化 MIPI PHY、Sensor 时序寄存器
- 清空 vb2 旧 buffer 状态,重新 QBUF
驱动开发规范要点
- 所有 Camera 通路严格基于 media-ctl 拓扑管理,禁止绕开 media 直接数据流
- vb2 统一使用 dma-contig CMA 内存,适配 mmap 与 dma_buf 导出
- dma_buf 读写必须成对执行 cache 同步接口,封装统一工具函数
- 在 sysfs 导出全链路统计(丢帧、MIPI 错误、buffer 状态),方便量产调试
- streamoff 阶段等待所有 DMA 传输完成、所有 buffer 回收再释放硬件资源,防 Oops
- 异步 v4l2-async 框架匹配 Sensor,兼容多型号 Sensor 适配
- HDR / 多曝光场景动态修改 V/H 时序时,同步更新 media pad 格式,避免 fmt 不匹配花屏
1.vb2 统一使用 dma-contig CMA 内存,适配 mmap 与 dma_buf 导出,dma-config可以导出dma_buf吗?
vb2-vmalloc:仅虚拟连续、物理碎片化,无法导出可用的 dma_buf,DMA 硬件不支持,直接排除;
vb2-dma-sg:分散式 sg 内存,仅少数高端网卡 / 多通道硬件支持,Camera MIPI/ISP 不兼容;
vb2-dma-contig:
底层 CMA 物理连续,适配所有图像 DMA 外设;
原生同时支持 mmap(单进程 CPU 访问)+ VIDIOC_EXPBUF(导出 dma_buf 跨硬件共享);
缓存同步逻辑内置,配套规范里「成对 cache 同步」要求;
车载 / 手机多摄、Android HAL3 多流并发场景唯一合规选择。
ISP 基础图像算法流程
面向芯片原厂 Camera 驱动开发,分为 硬件流水线模块原理 、 算法逻辑 、 软硬件交互 、典型故障与调参调试四大部分,覆盖 RAW 输入到 YUV 输出全链路。
ISP 整体数据流链路(标准通用流水线顺序)
Sensor 输出 RAW Bayer → ISP 前端校正 → 降噪 → 色彩处理 → HDR 融合 → 几何矫正 → 格式缩放 / 转换 → YUV 输出给 vb2/dma_buf
标准硬件流水线固定执行顺序(不可颠倒,原厂硬件 IP 固化):
- BLC 黑电平校正
- DPC 坏点校正
- LSC 镜头阴影校正
- AWB 白平衡 / White Balance Gain
- CCM 色彩校正矩阵
- 2DNR 空域降噪
- HDR 多曝光融合(DOL/Stagger HDR)
- 3DNR 时域降噪
- Gamma 伽马校正
- Sharpen 锐化
- LDC 镜头畸变矫正 + Rotate 翻转
- CS 色彩空间转换 RGB→YUV
- Scaler 缩放、裁剪
- 输出 NV12/NV21/YUV420 送内存
前置基础概念
- Bayer 拜耳阵列主流:RGGB、GRBG、BGGR、GBRG;Sensor RAW 原始数据无色彩,ISP 逐通道分离 R/G/B。
- 黑电平 Black Level无光环境下 Sensor 仍有基础模拟输出值,不是 0;不同 ISO、增益下黑电平会漂移。
- 光学衰减 Lens Shading镜头中心亮、四角暗,RGB 三通道衰减不一致,必须 LSC 补偿。
- 3A 联动AE(自动曝光)、AWB(自动白平衡)、AF(自动对焦)是 ISP 算法控制中枢,驱动层负责硬件寄存器下发,算法库负责计算参数。
- 线性 RAW / 非线性 HDR RAW普通单曝光 RAW 为线性;DOL HDR 长短曝光分开存储,ISP 硬件完成融合还原高动态。
- 增益分层Sensor 模拟增益 → Sensor 数字增益 → ISP 数字总增益;过高增益会放大噪点。
ISP每个基础模块详细原理、作用、关键参数
1.黑电平校正(Black Level Correction)
原理
Sensor 暗电流带来基底偏移,直接叠加在所有像素上,高 ISO 下画面发灰、底色偏色。
ISP 逐通道减去固定黑电平值,还原纯黑基准。
- 静态黑电平:Sensor 寄存器固定 offset
- 动态黑电平:随模拟增益、温度变化实时补偿(OTP 存储校准值)
关键参数
r_blc /g_blc/b_blc;不同曝光 / ISO 分档配置
故障现象
- BLC 补偿不足:画面灰蒙蒙、暗处泛白
- 补偿过度:暗处细节丢失、死黑、断层
2.DPC坏点校正(Defect Pixel Correction)
原理
Sensor 像素生产存在亮点 / 暗点;分 静态坏点 (出厂固定,存 OTP)、 动态热坏点 (高温新增)。
硬件算法:对比周围邻域像素,超出阈值则插值替换。
- 静态 DPC:开机读取 Sensor OTP 坏点表写入 ISP
- 动态 DPC:实时邻域阈值检测
参数
坏点亮度阈值、邻域窗口大小(3x3/5x5)
故障
画面固定亮点、高温成片白点;阈值过高会抹除细小纹理。
3. LSC 镜头阴影校正 Lens Shading Correction
原理
镜头光学特性:中心透光高,四角亮度低;且 R、G、B 衰减比例不同,四角偏色。
LSC 用二维增益表对画面每个坐标像素乘补偿增益,拉平全局亮度、消除四角偏红 / 偏蓝。
- 标定:产线标准光源拍摄全白图,生成 LSC 网格系数存模组 EEPROM/OTP
- 多档增益:不同焦距、不同光圈切换不同 LSC 表
参数
LSC 网格分辨率(32x32/64x64)、R/G/B 三通道增益矩阵
故障
四角发黑、角落偏红 / 偏蓝;LSC 增益过强导致四角噪点放大。
4. AWB 自动白平衡 Auto White Balance
底层 ISP 硬件逻辑
光线色温不同,RGB 通道响应不一致(暖光 R 强,冷光 B 强)。
ISP 提供三组数字增益 r_gain /g_gain/b_gain,均衡三通道亮度实现白色不偏色。
- 硬件:统计窗口统计画面中性白点 RGB 均值
- 3A 算法:根据统计值计算白平衡增益下发 ISP
- 固定色温模式:日光 / 阴天 / 白炽灯预设 gain
配套 CCM 色彩校正矩阵
AWB 只均衡亮度,CCM 修正光谱偏移,还原真实色彩。
3×3 矩阵输入 RGB,输出校正后 RGB:
plain
R' = ccm00*R + ccm01*G + ccm02*B
G' = ccm10*R + ccm11*G + ccm12*B
B' = ccm20*R + ccm21*G + ccm22*B故障
- AWB 增益失衡:画面整体偏黄 / 偏蓝 / 偏绿
- CCM 矩阵错误:肤色失真、色彩饱和度异常
5. NR 降噪模块 2DNR + 3DNR
2DNR 空域降噪(单帧内降噪)
单张图像邻域滤波,去除椒盐噪点、彩色噪点;窗口 3x3/5x5。
- 强度:低强度保留细节,高强度模糊画面
- 色度 NR:单独抑制 UV 彩色噪点(夜景彩噪核心)
3DNR 时域降噪(多帧叠加)
连续多帧取平均抑制随机噪点,利用帧间运动判断:
- 静态区域:多帧融合大幅降噪
- 运动区域:降低融合权重,避免拖影模糊
关键联动逻辑
ISO 越高,自动提升 NR 强度;夜景 3DNR 全开,强光降低避免糊化。
典型问题
- NR 过低:夜景布满彩色噪点、颗粒感重
- NR 过高:人像边缘糊、文字发虚、运动物体拖影
6. HDR 高动态范围融合
主流 DOL HDR(双曝光 / 三曝光):Sensor 同时输出长曝光(暗部)、短曝光(高光)RAW。
ISP 硬件融合逻辑:
* 长短曝光对齐(运动防重影)
- 高光区域取短曝光防止过曝发白
- 暗部区域取长曝光提升细节
- 中间区域加权融合平滑过渡
参数
高光压缩比例、暗部提升增益、运动阈值
故障
- 明暗交界处断层、发白高光无细节
- 运动物体重影、边缘虚影(对齐强度不足)
7. Gamma 伽马校正
人眼对暗部更敏感,线性 RAW 直接输出会暗处压缩、高光溢出。
Gamma 曲线压缩高光、拉伸暗部,匹配人眼视觉;标准 Gamma 2.2。
ISP 内置分段 Gamma LUT(查找表,256/1024 档)。
故障
曲线分段错误:画面明暗断层、对比度异常。
8. Sharpen 锐化
提取图像边缘高频分量叠加原图,提升清晰度;分 Y 亮度锐化、UV 色度锐化。
三层控制:边缘大强度、纹理中等、平坦区域关闭锐化防噪点放大。
故障
锐化过高:边缘白边黑边、夜景噪点加重;过低画面发雾模糊。
9. LDC 镜头畸变矫正 + Rotate
鱼眼 / 广角镜头存在桶形 / 枕形畸变,ISP 硬件坐标映射矫正像素位置。
同时支持 90/180/270 硬件翻转、镜像。
依赖 LDC 标定网格系数,存储在模组 OTP。
故障
画面边缘拉伸扭曲、四角缺失黑边;翻转错位。
10. CS 色彩空间转换 + Scaler 缩放
RGB Bayer 经过 ISP 处理后转为 YUV 格式(NV12/NV21/M420);
硬件 scaler 支持任意分辨率缩放、硬件裁剪,匹配上层 video 输出尺寸。
约束:宽高对齐(16/32 像素对齐,硬件 DMA 限制)。
3A算法与ISP驱动交互流程
1.AE自动曝光
完整闭环流程:
- ISP 硬件统计模块:划分数十个测光窗口,统计画面平均亮度
- 3A 算法读取 ISP 亮度统计值
- 算法计算目标曝光参数:Sensor 曝光行数、模拟增益、ISP 数字增益
- 驱动分两层下发:
- I2C 写入 Sensor 寄存器(曝光时间、模拟增益)
- 写入 ISP 寄存器(ISP 总增益、HDR 曝光比例)
- 下一帧生效,循环闭环稳定亮度
常见问题:
逆光画面发黑、强光过曝发白、亮度频繁闪烁(AE 收敛速度不合理)
2.AWB自动白平衡闭环
1.ISP 硬件白点统计窗口输出 RGB 均值
2.3A 计算 r/g/b gain 下发 ISP
3.切换色温场景平滑过渡 gain,避免画面跳色
3.AF自动对焦
1.ISP提供对比度统计值(高频锐度值)
2.AF 算法驱动 VCM 马达来回移动镜头,寻找对比度峰值完成对焦。
ISP软件分层机构(芯片原厂驱动分层)
1.ISP 硬件寄存器驱动层
纯底层,读写 ISP IP 寄存器、配置流水线模块开关、加载 LUT/LSC/CCM 矩阵、配置统计窗口、中断处理(帧结束、统计完成中断)
2.3A算法适配层
封装接口,向上对接算法库,向下调用寄存器层下发参数;缓存各档位校准参数(OTP/LSC/DPC/Gamma)
3.V4l2 Subdev控制层
将 3A、画质参数封装为 V4L2_CTRL,上层 v4l2-ctl/HAL 可直接调节锐化、NR、对比度、饱和度
4.校准标准管理模块
读取 Sensor / 模组 OTP/EEPROM,解析 LSC、DPC、黑电平、LDC 标定系数,初始化 ISP
ISP调试经验
一、基础调试工具与抓取手段
1.RAW原图抓取
驱动开启旁路,跳过 ISP 校正,直接抓取 Sensor Bayer RAW:
- 画面问题只出现在 ISP 输出:算法模块参数异常
- RAW 原图已经偏色 / 暗角 / 坏点:Sensor 硬件、LSC、BLC、模组标定问题
2.单模块开关隔离
逐个关闭 ISP 模块快速定位故障源:
关闭 LSC→四角不发黑 = LSC 参数错误;关闭 3DNR→噪点消失 = 降噪强度过高
3.寄存器dump工具
devmem 读取 ISP 全部寄存器,对比标准黄金参数表,定位丢失配置、LUT 加载失败
4.统计窗口可视化
导出 AE 测光、AWB 白点统计数据,判断测光偏区、白平衡统计失效
5.sysfs调试节点
- 各模块开关、增益实时读写
- LSC/Gamma/CCM 矩阵导出导入
- HDR 长短曝光融合权重打印
- NR/Sharpen 强度实时调节节点
二、分模块典型故障与调参方案
1.画面四角暗,角落偏色
根因:LSC 网格系数不匹配当前焦距 / 光圈;LSC 未加载;BLC 补偿不均
调试:
- 抓取纯白标定图重新生成 LSC 表写入 OTP
- 驱动切换分辨率时重载对应 LSC 矩阵
- 微调 RGB 分通道 LSC 增益,单独修正角落偏红偏蓝
2.夜景噪点严重,彩噪多
根因:2DNR 色度降噪强度低;3DNR 时域融合权重不足;黑电平补偿不准放大噪点
优化步骤:
- 高 ISO 档位自动提升 2D 色度 NR
- 夜间场景拉高 3DNR 融合比例,降低运动判定阈值
- 修正动态 BLC,消除基底噪点
- 适度降低 ISP 数字增益,优先提升 Sensor 曝光时间替代增益
3.画面运动物体重影、拖影
根因:3DNR 时域融合过高;HDR 长短曝光对齐力度不足
调试:
- 提高 3DNR 运动检测阈值,运动区域减少多帧融合
- HDR 开启运动对齐补偿,降低融合权重
4.高光容易过曝发白,暗处无细节
根因:AE 测光权重偏向高亮;HDR 高光压缩参数弱;Gamma 曲线高光段拉伸过度
调参:
- AE 测光增加暗部窗口权重,抑制高光曝光
- HDR 调高高光压缩比例,截断过曝像素
- 修改 Gamma LUT,压低高光增益、抬升暗部
5.色彩失真,肤色发黄/发绿
根因:AWB 增益失衡;CCM 色彩矩阵不匹配 Sensor 光谱;LSC RGB 补偿不一致
调试:
- 标准灰卡校准重新生成 CCM 矩阵
- 限制 AWB gain 最大最小值,防止极端色温色彩漂移
- 分日光 / 室内两套 CCM 自动切换
6.画面模糊,没有清晰度
根因:Sharpen 强度过低;NR 降噪过度抹平边缘;Gamma 曲线压缩细节
优化:
- 分层锐化,增强边缘高频分量,平坦区域弱化锐化防噪点
- 降低中低 ISO 下 2DNR 强度,保留纹理细节
7.明暗过度存在明显断层
根因:Gamma LUT 分段数量不足;HDR 融合过渡区间过窄;BLC 档位跳跃
调试:
- 1024 档高精度 Gamma LUT 替代 256 档
- 加宽 HDR 长短曝光融合中间过渡区间,平滑亮度变化
三、多场景整机调试经验
场景1:白天强光调试
核心约束:抑制高光溢出、降低 NR、适度锐化、CCM 提升色彩饱和度
禁止大 ISP 增益,避免强光噪点;AE 降低曝光时间,优先保证高光细节。
场景2:夜景低光调试
核心约束:全开 2D+3D 降噪、HDR 必开、抬升暗部 Gamma、适度放宽曝光时间限制;
缺点取舍:降噪会轻微模糊,平衡噪点与清晰度。
场景3:室内荧光灯/白炽灯(色温跳变)
问题:灯光频闪、AWB 频繁跳色、亮度闪烁
调试:
- AE 增加频闪检测,锁定曝光行数规避工频频闪
- AWB 增加平滑滤波,限制 gain 单次变化幅度,防止画面跳变
场景4:广角/鱼眼镜头畸变
- 产线标定生成高精度 LDC 网格
- ISP 开启边缘像素填充,消除矫正后四角黑边
- 缩放模块配合裁剪多余空白区域
四、驱动层通用ISP稳定性调试经验
1.分辨率切换规范
切换帧率 / 分辨率必须 STREAMOFF,重新加载全套 ISP 参数(BLC/LSC/Gamma/CCM/NR);动态改参数易造成 LUT 截断、画面错乱。
2.HDR模式切换处理
单曝光↔多曝光切换时,重置 ISP 融合模块、重新配置长短曝光统计窗口,防止明暗断层。
3.高低温稳定性
低温 Sensor 黑电平漂移大,启用动态 BLC 补偿;高温热坏点增多,动态 DPC 阈值自动提升。
4.内存带宽瓶颈
ISP 流水线处理高分辨率 + HDR+3DNR 时带宽占用极高,若出现丢帧 / 撕裂:
- 降低 3DNR 融合窗口大小
- 降低 MIPI RAW 吞吐带宽
- 增大 ISP 内部 FIFO 深度
5.低功耗休眠唤醒
唤醒后完整重载所有 ISP LUT、校正矩阵,寄存器断电丢失,缺少加载会导致画面发黑、偏色。
五、量产标定流程
- 暗场拍摄:采集黑电平、静态坏点 DPC 表写入 OTP
- 均匀白场光源:生成 LSC 镜头阴影校正矩阵
- 标准 24 色卡:校准 CCM 色彩矩阵、Gamma 曲线
- 多档位光源(日光 / 阴天 / 室内):标定 3A 收敛参数
- 畸变标定台:生成 LDC 矫正网格所有标定参数模组独立存储,驱动开机自动读取适配 ISP
ISP问题标准排查流程
- 抓取原始 Bayer RAW,区分问题来源(Sensor 硬件 / ISP 算法)
- 单模块关闭法定位异常校正模块(LSC/DPC/NR/HDR 等)
- 核对 OTP 标定数据是否正常读取,矩阵 / LUT 是否加载完整
- 检查 3A 下发参数是否收敛、AE/AWB 统计窗口是否正常工作
- 寄存器对比黄金参数,排查配置缺失、时序下发错误
- 分亮度场景(强光 / 室内 / 夜景)调整对应档位参数
- 高低温长时间拷机验证动态补偿稳定性
SOC时钟-regulator-DTS
整套体系是嵌入式 Linux 硬件资源管理底层基础,Camera 供电、MIPI PHY、ISP、Sensor 时序全部依赖这三块,也是开机无图像、概率性花屏、I2C 无应答、低功耗异常最高发故障根源。
regulator电源子系统(供电管理)
核心概念
Regulator = 电压调节器,分为两类:
1.PMIC 内置 LDO/Buck :AVDD、DVDD、DOVDD、MIPI PHY、ISP 内核电压
2.SoC 内部集成线性稳压器 :给内部 IP(CSI、ISP、MIPI PHY)供电
关键术语:
supply:某模块依赖的一路电源min_uV / max_uV:该设备工作电压范围enable:电源使能开关(硬件使能引脚 / 寄存器开关)ramp_delay:电压升降斜坡延时,防止浪涌击穿 Sensorpower_on_delay:上电稳定等待时间active / suspend:正常工作电压、休眠降压
Camera相关典型Regulator分组(Sensor模组标准3路)
1.DOVDD IO电源:1.8v,Sensor IIC,MIPI IO电平域,必须最先上电
2.DVDD数字内核:1.2V~1.5V,Sensor
3.AVDD模拟电源:2.8v-3.3v,感光阵列,模拟放大,最后上电
上电时序强制顺序:
DOVDD(数字IO接口电源) -> DVDD(数字核心电源) -> AVDD(模拟电源)
下电反向:AVDD -> DVDD -> DOVDD
时序颠倒直接出现:I2C无ACK,MIPI无HS波形,Sensor锁死
其他SOC内部电源:
- vdd_mipi :MIPi DPHY/CPHY供电
- vdd_isp : ISP处理器内核电压
- vdd_csi : CSI接收控制器电源
- vdd_core :全局内核电压
DTS标准regulator配置示例
plain
pmic {
reg_avdd: ldo_avdd {
regulator-min-microvolt = <2800000>;
regulator-max-microvolt = <2800000>;
regulator-ramp-delay = <1000>; /* 电压爬升延时us */
};
reg_dovdd: ldo_dovdd {
regulator-min-microvolt = <1800000>;
regulator-max-microvolt = <1800000>;
};
};
sensor@1a {
avdd-supply = <®_avdd>;
dovdd-supply = <®_dovdd>;
dvdd-supply = <®_dvdd>;
power-on-delay-us = <2000>; /* 每路电源稳定后等待2ms */
reset-gpios = <&gpio RST_PIN GPIO_ACTIVE_LOW>;
reset-delay-us = <50000>; /* 复位拉高后等待50ms */
};Regulator驱动核心APi
c
// 获取电源句柄
struct regulator *devm_regulator_get(dev, "avdd");
// 使能电源(上电)
regulator_enable(reg);
// 关闭电源(下电)
regulator_disable(reg);
// 动态调压
regulator_set_voltage(reg, min, max);典型故障与调试经验
故障1:偶尔开机无图像,复现概率30%
根因:
power-on-delay-us 延时太短,电压未稳定就释放 Sensor 复位
ramp-delay 过小,电压爬升过快产生浪涌
调试方案:
DTS 加大 power-on-delay-us 至 2000~50000
示波器抓取三路电源上电波形,确认电压到达额定值再拉高 RST
严格保证 DOVDD 最先上电
故障2:I2C读写间歇性失败,高低温恶化
根因:模拟电源 AVDD 纹波过大,干扰 I2C/MIPI 模拟电路
调试:
PMIC 端加大输出电容
提高 ramp 延时,减少电流冲击
区分模拟 / 数字电源地层 PCB 分割
故障3:休眠唤醒后不出图
根因:休眠时 regulator 被全部关闭,唤醒流程未重新按时序上电
调试:
suspend 阶段仅降压,不 disable Camera 三路电源;或唤醒完整重走上电时序
streamoff 必须先关数据流再关电源
故障4:高帧率高分辨率随机丢帧,大流量下电压跌落
根因:MIPI PHY/ISP 供电压降,大流量下电压跌落
调试:
提升 vdd_mipi/vdd_isp 电压档位
检查 regulator 负载电流能力,更换大电流 LDO
调试工具:
c
# 查看系统所有regulator状态、电压、使能计数
cat /sys/class/regulator/regulator*/name
cat /sys/class/regulator/regulator*/microvolts
cat /sys/class/regulator/regulator*/state
# 内核打印电源开关日志
dmesg | grep regulatorCLK时钟子系统(时钟树管理)
基础概念
SoC 内部所有 IP 都依赖时钟,时钟树由 PLL、分频器、多路选择器、门控单元组成。
Camera 相关时钟分为两大类:
1.Sensor侧外部时钟:SCLK(24MHz/26MHz 晶振输入 Sensor)
2.SOC内部IP时钟
- mipi_phy_clk:MIPI DPHY 高速参考时钟,决定 lane 速率上限
- csi_clk:CSI 接收控制器工作时钟
- isp_clk:ISP 流水线主时钟,分辨率越高需要频率越高
- pixel_clk:像素同步时钟,匹配 Sensor PCLK
时钟核心操作
clk_get:获取时钟句柄clk_set_rate:设置目标频率(PLL 倍频 + 分频)clk_prepare_enable:打开时钟门控clk_disable_unprepare:关闭时钟,省电clk_set_parent:切换 PLL 父时钟源
关键约束(Camera必看)
- MIPI PHY 时钟与 lane 速率强绑定例:DPHY 1.5Gbps/lane,PHY 参考时钟必须配置对应 PLL 档位
- ISP 时钟带宽约束:4K+HDR+3DNR 场景必须提升 isp_clk,否则流水线阻塞丢帧
- 动态调频:低帧率休眠降低时钟频率,低功耗场景关闭闲置 IP 时钟
- 时钟门控:不用时必须关闭,否则漏电、发热、干扰 MIPI 时序
DTS时钟标准配置
plain
sensor@1a {
clocks = <&clk_cam_sensor>;
clock-names = "xclk";
};
csi@xxx {
clocks = <&clk_mipi_phy>, <&clk_csi>;
clock-names = "phy", "core";
};
isp@yyy {
clocks = <&clk_isp>;
clock-frequency = <400000000>; /* 400M ISP主时钟 */
};时钟典型故障&调试经验
1.MIPI HS波形速率不对,持续CRC错误
根因:mipi_phy_clk 父 PLL 选错、分频配置错误
调试:
cat /sys/kernel/debug/clk/clk_summary查看当前实际频率- DTS 固定 PHY 时钟父 PLL,禁止动态切换
- 重新计算 lane 速率对应的参考时钟档位
2.高分辨率画面撕裂,丢帧,流水线超时
根因:isp_clk 频率过低,ISP 硬件处理带宽不足
调试:
- 提高 isp_clk 到更高 PLL 档位
- 关闭 3DNR、HDR 等高带宽模块临时验证带宽瓶颈
3.休眠唤醒MIPI同步丢失
根因:休眠关闭 MIPI PHY 时钟,唤醒未重新 set_rate+enable
调试:唤醒流程重新初始化 PHY 时钟、重新配置速率
4.整机待机功耗偏高
根因:闲置 CSI/ISP/MIPI 时钟未关闭,时钟门控常开
调试:streamoff 后调用 clk_disable_unprepare 关闭全部 Camera IP 时钟
时钟调试工具
plain
# 打印全时钟树、当前频率、使能次数
cat /sys/kernel/debug/clk/clk_summary
# 单独查看某个时钟
cat /sys/kernel/debug/clk/mipi_phy/clk_rate
# 过滤时钟相关日志
dmesg | grep clkDTS设备树核心知识
1.DTS核心作用
把 SoC 硬件资源(寄存器地址、中断、GPIO、时钟、regulator、pinctrl)描述为树形文本,内核驱动通过 DT 匹配获取硬件参数,实现驱动与硬件解耦。
- DTS:源码描述文件
- DTC:编译工具,生成 DTB 二进制
- DTBO:设备树叠加层,用于不同 Sensor / 客制化硬件适配
2.Camera驱动必备DTS标准属性分类
(1) 基础匹配与寄存器
plain
compatible = "ov,ov13850"; // 驱动匹配字符串
reg = <0x1a>; // I2C设备地址
reg = <0x10000000 0x1000>; // SoC内部IP寄存器基地址+长度(2) 中断
plain
interrupt-parent = <&gic>;
interrupts = <GIC_SPI 80 IRQ_TYPE_EDGE_RISING>;Camera 常用中断:帧结束中断、MIPI 错误中断、ISP 统计完成中断
(3) 时钟组
clocks / clock-names:绑定各路 IP 时钟
(4) 电源组
xxx-supply:绑定对应 PMIC regulator
(5)GPIO 控制
plain
reset-gpios = <&gpio 10 GPIO_ACTIVE_LOW>; // 复位(Reset)控制引脚,配置为低电平有效,平时保持高电平
flash-gpios = <&gpio 11 GPIO_ACTIVE_HIGH>; // 闪光灯控制引脚,配置为高电平有效,平时保持低电平
ircut-gpios = <&gpio 12 GPIO_ACTIVE_HIGH>;(6) PinCtrl引脚复用
plain
pinctrl-names = "default", "sleep";
pinctrl-0 = <&cam_i2c_pins & mipi4lane_pins>;
pinctrl-1 = <&cam_sleep_pins>;- default:正常工作引脚功能(I2C、MIPI 高速)
- sleep:休眠拉低 / 浮空,防漏电、干扰
(7) MIPI CSI专属属性
plain
mipi-lanes = <4>;
mipi-rate = <1500000000>; /* 1.5Gbps */
data-type = <RAW10>;
link-type = "dphy";(8) Sensor时序参数 (驱动读取HV时序校验)
plain
hactive = <1920>;
vactive = <1080>;
hblank = <320>;
vblank = <120>;
pclk = <148500000>;(9) Media/V4l2子设备拓扑链路
描述 sensor→csi→isp 的 pad 连接关系,media-ctl 依赖该拓扑生成链路
3.DTS设备树匹配流程
- 内核加载 DTB,遍历所有 device_node
- 驱动
of_match_table匹配 compatible 字符串 - 驱动内部
devm_of_address_iomap映射寄存器 devm_clk_get解析 clocks 属性获取时钟devm_regulator_get解析 xxx-supply 获取电源devm_gpiod_get解析复位、闪光灯 GPIO- of_property_read_u32 读取时序、lane、速率等自定义参数
4.DTBO叠加层(原厂多sensor使用独立dtbo叠加)
- SoC 基础 dts 不变,不同 Sensor 使用独立 dtbo 叠加
- 优势:不用修改主 DTS,量产切换模组只更换 dtbo
- 示例:ov13850.dtbo、imx415.dtbo,分别覆盖 I2C 地址、电源时序、MIPI 参数
5.DTS高频问题与完整调试经验
故障1:probe失败,驱动不加载
- compatible 字符串与驱动 of_match_table 不一致
- reg I2C 地址写错,PMIC/regulator phandle 引用错误(®_avdd 不存在)
- 时钟 /regulator phandle 标签拼写错误
调试手段:
plain
# 查看当前设备树节点属性
cat /proc/device-tree/soc/i2c@1a/sensor@1a/compatible
# 打印probe失败日志
dmesg | grep "of:"
dmesg | grep "probe"故障2:复位GPIO不生效,Sensor一直处于复位
- GPIO 编号写错、GPIO_ACTIVE_LOW/HIGH 极性颠倒
- pinctrl 默认模式将该引脚复用为其他功能调试:
- 查看 pinctrl 状态,确认复位脚配置为 GPIO 功能
- 使用 gpio_sysfs 手动拉高拉低,测试硬件波形
故障3:I2C无应答,读 Sensor 寄存器全 0
排查顺序:
- DOVDD 电源是否正常使能(regulator 打印电压)
- 复位是否成功释放
- pinctrl I2C 引脚是否配置正确
- xclk 外部时钟是否输出
故障 4:MIPI 只有 LP 波形,无 HS 高速数据
根因:
- mipi-rate 配置超出 PHY 支持范围
- mipi-lanes 数量写错(写 1lane 实际硬件 4lane)
- mipi_phy_clk 时钟未成功使能 / 频率错误
故障 5:休眠后漏电大、MIPI 干扰其他外设
根因:pinctrl sleep 模式未配置,I2C/MIPI 引脚休眠仍处于驱动状态
调试:补充 pinctrl-1 休眠配置,将 MIPI/I2C 设为浮空输入
故障 6:读取 hactive/hblank 等时序参数全部为 0
根因:DTS 缺少对应属性,驱动 of_property_read_u32 读取失败未做默认容错
优化:驱动增加默认时序兜底,打印 DT 参数读取失败日志
6.DTS调试工具全套
plain
# 查看完整设备树节点
ls /proc/device-tree/
# 打印节点下所有属性
cat /proc/device-tree/sensor@1a/mipi-rate
# 反编译dtb查看原始DTS结构
dtc -I dtb -O dts boot/dtb.img -o dump.dts
# 内核DT解析报错日志
dmesg | grep device_tree
# 查看pinctrl引脚状态
cat /sys/kernel/debug/pinctrl/pinctrl0/pinmux-pins三大模块联动标准开机流程(Camera完整上电链路)
- 内核解析 DTS,匹配 sensor/csi/isp 驱动
- 驱动解析 regulator phandle,按 DOVDD→DVDD→AVDD 顺序使能电源,等待 power-on-delay
- 拉高 Sensor 复位 GPIO,等待 reset-delay-us 稳定
- 使能 sensor xclk 外部晶振时钟
- I2C 初始化 Sensor,写入基础时序寄存器
- 打开 mipi_phy_clk、csi_clk、isp_clk,配置目标频率
- 配置 pinctrl default 模式,MIPI/I2C 切换为功能引脚
- media 子系统构建拓扑,设置 pad 格式,STREAMON 启动采集
通用排错标准流程(从底层到上层)
- 查 DTS:compatible、reg、supply、clock、gpio、pinctrl 属性是否完整正确
- 查 Regulator:电源是否使能、电压是否达标、上电时序顺序与延时
- 查 CLK:各路 IP 时钟是否成功使能、实际频率是否匹配需求
- 查 GPIO 复位:复位极性、延时、pinctrl 复用功能
- 硬件波形抓取:示波器确认电源、复位、MIPI、I2C 波形
- 上层验证:media-ctl、v4l2-ctl 测试数据流
原厂驱动开发规范要点
- 所有硬件资源(电压、时钟频率、延时、lane 数)全部放在 DTS,驱动不写死硬编码
- 电源严格遵循先 IO、后数字、最后模拟时序,休眠反向关闭
- 时钟按需开关:streamon 打开,streamoff 全部关闭降低功耗
- pinctrl 区分 default/sleep 两套状态,解决休眠漏电与干扰
- DT 读取参数增加容错,缺失参数打印 warning 并加载默认值
- 多 Sensor 采用 DTBO 叠加方案,主 DTS 保持统一,便于量产维护
- 驱动使用 devm_系列托管资源(clk/regulator/gpio),避免内存 / 资源泄漏
树莓派5 Camera完整设备树整理
一、摄像头电源Regulator节点(供电控制)
1.cam0_reg/cam1_reg
plain
cam0_reg: cam0_reg {
compatible = "regulator-fixed";
regulator-name = "cam0_reg";
enable-active-high;
status = "okay";
gpio = <&rp1_gpio 34 0>; // CD0_IO0_MICCLK MIPI0供电使能
};
cam1_reg: cam1_reg {
compatible = "regulator-fixed";
regulator-name = "cam1_reg";
enable-active-high;
status = "okay";
gpio = <&rp1_gpio 46 0>; // CD1_IO0_MICCLK MIPI1供电使能
};- 功能: 摄像头模组主电源开关 ,Linux regulator 子系统管理 Sensor 3.3V/1.8V 供电轨
compatible = "regulator-fixed":固定电压稳压器,仅支持开关,不可调压enable-active-high:GPIO 输出高电平给摄像头上电,低电平断电rp1_gpio 34/46:RP1 扩展芯片引出的两路独立电源控制脚,分别对应 CAM0、CAM1 FPC 接口- 业务逻辑:加载摄像头驱动时自动拉高 GPIO 上电;卸载 / 休眠时断电保护 Sensor
2.cam_dummy_reg
plain
cam_dummy_reg: cam_dummy_reg {
compatible = "regulator-fixed";
regulator-name = "cam-dummy-reg";
status = "okay";
};作用: 占位虚拟电源 ,第三方摄像头 overlay 无专用电源时做兼容占位,防止 DTS 依赖报错
二、摄像头专用IIC控制总线(Sensor寄存器/EEPROM)
1.i2c_csi_dsi0(CAM0 I2C,i2c-6)
c
i2c_csi_dsi0: &i2c6 {
pinctrl-0 = <&rp1_i2c6_38_39>;
pinctrl-names = "default";
clock-frequency = <100000>;
symlink = "i2c-6";
};- 对应硬件:RP1 I2C6,SDA=GPIO38、SCL=GPIO39,直连 MIPI0 (CAM0) 排线
- 用途:读写 CMOS Sensor 寄存器、模组 EEPROM(镜头校正、AWB 标定数据)
clock-frequency = 100000:标准 100K I2C 低速模式,适配摄像头 EEPROM
2.i2c_csi_dsi1(CAM1 I2C,i2c-4)
plain
i2c_csi_dsi1: &i2c4 {
pinctrl-0 = <&rp1_i2c4_40_41>;
pinctrl-names = "default";
clock-frequency = <100000>;
symlink = "i2c-4";
};- 对应硬件:RP1 I2C4,SDA=GPIO40、SCL=GPIO41,直连 MIPI1 (CAM1) 排线
i2c_csi_dsi: &i2c_csi_dsi1;兼容别名,旧摄像头 overlay 统一引用
三、MIPI CSI图像接收硬件通道(rp1_csi0/rp1_csi1)
plain
csi0: &rp1_csi0 {
iommus = <&iommu5>;
};
csi1: &rp1_csi1 {
iommus = <&iommu5>;
};核心作用
RP1 芯片内置 MIPI CSI-2 DPHY 接收控制器 ,两路独立硬件通道:
- csi0 = MIPI 接口 0(CAM0),最多 2 数据 lane;csi1 = MIPI 接口 1(CAM1),4 数据 lane,支持高分辨率高帧率 Sensor
- 接收摄像头差分 MIPI RAW 图像数据流,转并行送给 BCM2712 VideoCore VII ISP 处理
iommus = <&iommu5>:绑定 IOMMU5,DMA 内存地址翻译,解决大内存访问、硬件 DMA 隔离
四、IOMMU5摄像头DMA内存管理
配置来源
plain
&csi0 { iommus = <&iommu5>; };
&csi1 { iommus = <&iommu5>; };
&dsi0 { iommus = <&iommu5>; };
&dsi1 { iommus = <&iommu5>; };
&dpi { iommus = <&iommu5>; };
&vec { iommus = <&iommu5>; };IOMMU5 对摄像头的作用
- 地址翻译 :CSI 控制器是 32 位 DMA 外设,IOMMU 把 32 位 IO 虚拟地址 (IOVA) 翻译成 64 位系统物理内存,无需 bounce 缓冲,零拷贝提升帧率
- 硬件隔离安全 :限制 CSI DMA 仅访问图像缓冲区,防止 Sensor 硬件异常乱改内核内存导致死机
- 分散内存聚合 :系统碎片化内存自动映射成 CSI 连续虚拟块,简化 V4L2 图像缓冲管理
五、摄像头参考时钟节点(cam0_clk/cam1_clk)
cpp
cam0_clk: cam0_clk {
compatible = "fixed-clock";
#clock-cells = <0>;
status = "disabled";
};
cam1_clk: cam1_clk {
compatible = "fixed-clock";
#clock-cells = <0>;
status = "disabled";
};- 功能:提供 Sensor 外部 MCLK 主晶振(24MHz/27MHz 常用)
- 默认 status = "disabled":时钟由 VPU 固件动态分配,摄像头 overlay 加载后自动启用对应时钟输出到 MIPI 排线时钟引脚
- 硬件引脚对应 RP1 GPIO35 (CD0_IO0_MICDAT0)、GPIO48 (CD1_IO1_MICDAT1)
六、RP1 GPIO引脚定义(摄像头信号引脚映射)
取自&rp1_gpio的gpio-line-names,摄像头专用引脚:
cpp
GPIO34: CD0_IO0_MICCLK // CAM0电源使能
GPIO35: CD0_IO0_MICDAT0 // CAM0 MCLK时钟输出
GPIO38: CD0_SDA // CAM0 I2C SDA
GPIO39: CD0_SCL // CAM0 I2C SCL
GPIO40: CD1_SDA // CAM1 I2C SDA
GPIO41: CD1_SCL // CAM1 I2C SCL
GPIO46: CD1_IO0_MICCLK // CAM1电源使能
GPIO48: CD1_IO1_MICDAT1 // CAM1 MCLK时钟输出pinctrl 子系统自动切换引脚功能:摄像头启用时从普通 GPIO 切换为 MIPI/I2C / 时钟专用复用模式
七、设备别名(上层驱动 / 用户空间识别 cam0/cam1)
plain
aliases: aliases {
i2c10 = &i2c_csi_dsi0;
i2c11 = &i2c_csi_dsi1;
csi0: &rp1_csi0;
csi1: &rp1_csi1;
};i2c10/i2c11:传统树莓派摄像头驱动兼容别名,旧 overlay 默认读取 /dev/i2c-10/i2c-11csi0/csi1:V4L2 媒体框架别名,rpicam-hello、libcamera通过别名枚举两路摄像头设备
八、关联多媒体后端(Video Core,图像处理)
1.pixelvalve0 /pixelvalve1(BCM2712 顶层)
plain
pixelvalve0: pixelvalve@7c410000 {
compatible = "brcm,bcm2712-pixelvalve0";
reg = <0x7c410000 0x100>;
interrupts = <GIC_SPI 101 IRQ_TYPE_LEVEL_HIGH>;
};
pixelvalve1: pixelvalve@7c411000 {
compatible = "brcm,bcm2712-pixelvalve1";
reg = <0x7c411000 0x100>;
interrupts = <GIC_SPI 110 IRQ_TYPE_LEVEL_HIGH>;
status = "disabled";
};- PixelValve:VC7 ISP 像素流水线,接收 CSI 原始 RAW,做去拜耳、白平衡、降噪、HDR 处理
- 默认关闭,加载摄像头 overlay 后自动使能对应通道
2.hvs 显示 / 图像合成控制器
plain
hvs: hvs@107c580000 {
compatible = "brcm,bcm2712-hvs";
interrupt-parent = <&disp_intr>;
interrupts = <2>, <9>, <16>;
iommus = <&iommu4>;
};作用:接收 ISP 处理完的图像帧,缓存、缩放,输出到 HDMI/DSI 屏幕预览摄像头画面
九、摄像头DTS整体数据流链路总结
plain
CMOS Sensor(MIPI CSI-2)
↓MIPI差分数据
RP1_csi0 / RP1_csi1(MIPI接收PHY)
↓DMA(IOMMU5地址转换)
系统物理内存RAW帧缓存
↓PixelValve VC7 ISP图像处理(3A/HDR/降噪)
HVS帧合成器
↓HDMI/DSI 实时预览
I2C_csi_dsi0/1 ←→ Sensor/EEPROM(参数读写)
cam0_reg/cam1_reg → 摄像头模组上电控制
cam0_clk/cam1_clk → Sensor外部MCLK参考时钟十、关键属性速查表
| DTS 节点 | 核心 compatible | 核心资源 | 核心业务 |
|---|---|---|---|
| cam0_reg | regulator-fixed | rp1_gpio34 | CAM0 电源开关 |
| cam1_reg | regulator-fixed | rp1_gpio46 | CAM1 电源开关 |
| i2c_csi_dsi0 | brcm,brcmstb-i2c | rp1_i2c6 | CAM0 Sensor/EEPROM 通信 |
| i2c_csi_dsi1 | brcm,brcmstb-i2c | rp1_i2c4 | CAM1 Sensor/EEPROM 通信 |
| rp1_csi0 | rp1 MIPI CSI 控制器 | MIPI0 2lane | CAM0 图像数据接收 |
| rp1_csi1 | rp1 MIPI CSI 控制器 | MIPI1 4lane | CAM1 图像数据接收 |
| cam0_clk | fixed-clock | 外部晶振输出 | CAM0 Sensor MCLK |
| cam1_clk | fixed-clock | 外部晶振输出 | CAM1 Sensor MCLK |
| pixelvalve | brcm,bcm2712-pixelvalve | VC7 ISP | RAW 图像 ISP 处理 |
| iommu5 | ARM SMMU | DMA 地址翻译 | CSI 内存隔离 / 零拷贝 |