自动驾驶数据加密存储 与自动驾驶算法防逆向 是我过去两年在量产项目中反复踩坑的两个方向。一辆 L4 级测试车,8 路摄像头 + 3 路激光雷达一天就能啃下 400 GB 以上的原始数据。这些数据里有人脸、车牌、GPS 轨迹,还有决定车辆行为的感知模型和决策算法。
但问题来了------数据存哪儿?怎么加密才不会把性能拖垮?训练的算法模型被人逆向复制了怎么办?
我在过去两年踩了不少坑:数据库加密后查询慢了一个数量级、人脸脱敏漏了一批、Secure Boot 没配好导致固件被降级攻击、HSM 密钥管理搞成了运维噩梦......
这篇文章不讲大道理,只列 7 个我亲手踩过的坑 ,每个都带着现象、原因和最终解法,覆盖自动驾驶数据加密存储 与自动驾驶算法防逆向两大维度。读完你能少走至少半年的弯路。
背景:自动驾驶数据加密存储与算法防护原理
自动驾驶的安全困局:数据加密与算法防逆向两大挑战:数据加密与防逆向两条线
自动驾驶的数据链路大致长这样:
采集端 → 摄像头/LiDAR/毫米波雷达日产生 TB 级原始数据 → 车载计算平台 实时推理决策 → 云端 训练迭代 + 数据回传
这条链路上藏着两类截然不同的安全需求:
| 维度 | 保护对象 | 核心威胁 | 防护手段 |
|---|---|---|---|
| 自动驾驶数据加密存储 | 采集的人脸/车牌/轨迹、训练数据集 | 拖库泄露、内部越权、跨境违规 | TDE/DBG/KADP 分层加密 |
| 自动驾驶算法防逆向 | ECU 固件、感知模型、决策逻辑 | 逆向工程、固件篡改、OTA 降级攻击 | 签名验签、Secure Boot、HSM |
两者一个保数据"不能看",一个保代码"不能改/不能抄",但底层都依赖同一个基石------密钥管理。
密钥管理:一切安全的根
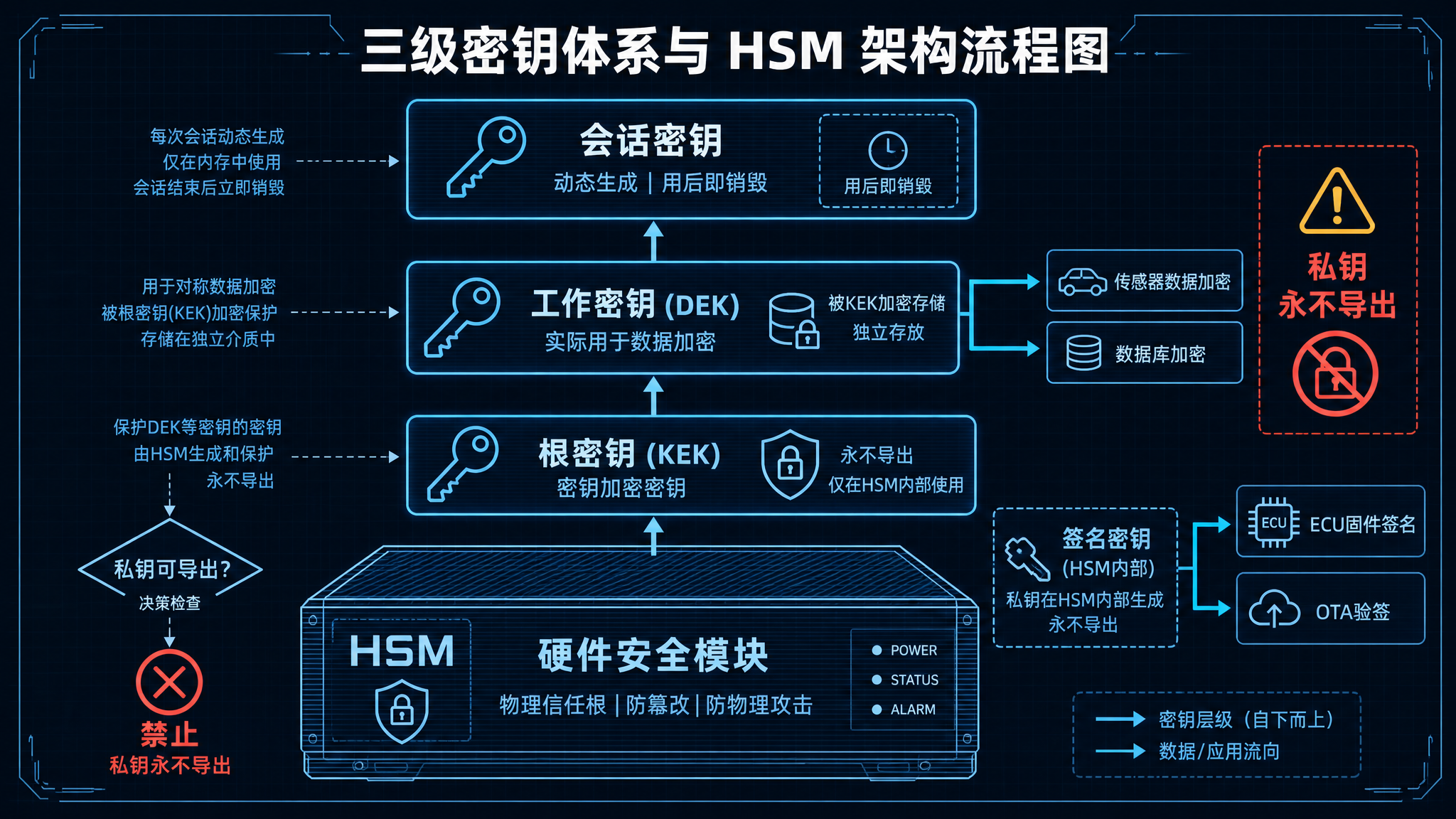
不管是自动驾驶数据加密存储 还是自动驾驶算法防逆向 ,密钥一旦泄露,整个防护体系就归零了。工业界的标准做法是三级密钥体系:
text
HSM 硬件加密机
└─ 根密钥(KEK)------ 永不导出,物理隔离
└─ 工作密钥(DEK)------ 由 KEK 加密保护,加密实际数据
└─ 会话密钥 ------ 每次通信临时生成,用完即销毁车规级场景下,根密钥通常存储在 HSM(硬件安全模块) 中,密钥的生成、使用、销毁全在硬件内部完成,软件层永远拿不到明文。

自动驾驶数据加密存储:三层兜底方案
量产项目里的自动驾驶数据加密存储方案不会只用一种手段,通常是三层叠甲:
text
┌─ 第一层:存储层透明加密(TDE)─────────────┐
│ 写入磁盘自动加密,读取自动解密,应用零改造 │
│ 性能损耗 ≈ 3%,兜住"备份被拖库"的风险 │
├─ 第二层:敏感字段级加密 ─────────────────────┤
│ 人脸/车牌/GPS 坐标入库前单独加密或脱敏 │
│ 防的是"内部运维人员直连数据库查明文" │
├─ 第三层:传输加密 + 访问控制 ────────────────┤
│ mTLS + SM4 国密通道,颗粒度到字段级的权限管控│
└────────────────────────────────────────────┘算法防护:从烧录到 OTA,步步为签
ECU 里的算法模型如何实现自动驾驶算法防逆向 和防篡改?靠自动驾驶算法防逆向的核心机制------签名链来保证最后一道防线:
text
BootROM ──验签──→ BootLoader ──验签──→ OS ──验签──→ 应用每一级只加载被私钥签过名的下一级镜像,签名密钥存储在 HSM 中。OTA 升级时同样流程:云端签名 → TLS 传输 → 车端验签 → Secure Counter 防版本回滚。这套机制是实现自动驾驶算法防逆向 的核心防线------即使攻击者拿到芯片,没有签名密钥也无法刷入篡改过的固件。相关方案在 SAE 自动驾驶感知系统安全加密论文 中也有深入讨论。
后面 7 个坑,就围绕自动驾驶数据加密存储 和自动驾驶算法防逆向这两条线展开。
python
# 三级密钥体系:自动驾驶数据加密存储的核心
# 伪代码:三级密钥加密存储示意
import os
from cryptography.fernet import Fernet
from cryptography.hazmat.primitives import hashes
from cryptography.hazmat.backends import default_backend
def encrypt_sensor_data(plaintext, kek_encrypted_dek):
"""KEK(硬件HSM内) → DEK(密文存储) → 实际加密"""
# Step 1: 解密DEK(调用HSM API,KEK在HSM内部)
dek = hsm_decrypt(kek_encrypted_dek, key_label="autonomous-kek-v1")
# Step 2: 用DEK加密传感器数据
cipher = Fernet(dek)
return cipher.encrypt(plaintext.encode())
# Step 3: 实际的KEK从未出现在代码中
# KEK在HSM内部,API只接受"label"参数7 个坑 · 上(自动驾驶数据加密存储篇)
坑 1:TDE 透明加密一开,数据加密存储的查询慢了一个数量级
现象:数据库文件加密后,原来 200ms 的查询变成了 2s+。
原因:TDE 加密的是整个表空间或文件页,加密后数据库的索引失效了------不是索引本身没了,而是查询计划选错了索引,走了全表扫描。核心原因是加密后的数据页失去了原有的物理序,优化器估算的扫描代价偏低。
解法:这是自动驾驶数据加密存储方案中最高频的坑。
- 不要在已加密的表上依赖数据库自动统计信息,加密后手动
ANALYZE一次 - 如果用的是字段级加密(比如对
plate_number列单独加密),那WHERE plate_number LIKE '沪A%'这种查询必然慢------因为数据库没法对密文做 B+ 树索引 - 真正的解法是 加密后模糊查询:DBG 这类网关产品在加密时保留了可检索的特征(分词 + 哈希映射),让 LIKE/BETWEEN 操作在密文上依然可用
坑 2:人脸脱敏漏了一列,被合规部门找上门
现象 :数据共享给算法团队训练时,某张表的 face_feature 向量字段没脱敏就被导出了。
原因 :脱敏策略是按表维度配置的,但数据 pipeline 里有一条隐蔽的 ETL 链路绕过了脱敏网关,直接从备份库拉的数据。这是自动驾驶数据加密存储 项目中典型的"策略覆盖不全"问题。不是技术做不到,是资产盘点没做全。
解法:
- 先做数据资产盘点(哪些库、哪些表、哪些列有 PII),输出一张敏感字段矩阵
- 然后分层上锁:TDE 兜底文件安全 → DBG 做动态脱敏(按角色返回明文/脱敏/密文三视图)→ KTM 做静态脱敏(批量导出时自动处理)
- 最关键的是 禁止直连数据库,所有访问必须过网关
坑 3:GPS 加密后,路测回放系统直接罢工
现象:GPS 坐标字段用 AES-256 加密存储后,做路测回放分析的系统报数据格式错误。
原因:加密后的坐标变成了不可读的二进制,地图匹配算法直接崩了。这里犯了两个错:选错了加密粒度(不需要加密全字段),选错了加密方式(不应该用标准 AES)。
解法 :用 FPE(保留格式加密) 对 GPS 坐标做加密------加密后的密文仍然是"经度、纬度"格式,地图匹配算法不需要任何改动就可以处理。这是自动驾驶数据加密存储中"兼顾安全与可用性"的典型案例。安当 KADP SDK 的 FPE 模块实测对 GPS 坐标加密吞吐量达到 2972 Mbps。
python
# 伪代码:FPE 保留格式加密 GPS 坐标
from kadp import FPEEncryptor
enc = FPEEncryptor(algorithm="FF1", key_label="gps-fpe-key-v1")
# 加密后格式不变:31.2304°N, 121.4737°E → 58.9127°N, 89.2561°E
encrypted_lat = enc.encrypt("31.2304", alphabet="0123456789.")
encrypted_lng = enc.encrypt("121.4737", alphabet="0123456789.")坑 4:数据跨境 BYOK 没规划好,海外训练项目卡了半年
现象:国内采集的数据需要加密后传输到海外研发中心做联合训练,结果密钥管理方案被合规审计打回三次。
原因:《汽车数据安全管理若干规定》要求重要数据出境前必须经过加密处理,且加密密钥必须由国内一方独立管理,出境后的数据只能以密文形式存在,海外不能持有解密密钥。
解法 :BYOK(Bring Your Own Key)方案是跨境场景下自动驾驶数据加密存储的标准做法:
- 国内部署 KSP 密钥管理系统 + HSM,根密钥不出境
- 数据用 SM4 加密后出境,密钥标签指向国内 HSM
- 海外侧只能通过联邦学习接口参与训练,拿不到明文密钥和数据
- 密钥定期轮换,审计日志全量记录。自动驾驶数据加密存储的合规方案必须从一开始就规划好
7 个坑 · 下(自动驾驶算法防逆向篇)
坑 5:Secure Boot 签名链没闭环,算法防逆向的 OTA 惨遭降级攻击
现象:某次 OTA 推送后,部分车辆的中控屏出现了旧版本的已知漏洞,攻击者据此远程拿到了系统权限。明明每版固件都签了名,为什么旧版本的签名也能通过验证?
原因 :Secure Boot 链做到了 BootROM → BootLoader → OS 的逐级验签,但没有防版本回滚 。这是自动驾驶算法防逆向方案中最容易被忽略的一环------攻击者只需要拿到一个有签名的旧版本固件(可能是几个月前从报废车上 dump 出来的),就能在目标车辆上"合法"降级。
解法 :在签名验签链路中加入 Secure Counter(安全计数器)。每次合法 OTA 升级后,计数器值 +1;启动时固件的版本号必须 ≥ 计数器值,否则拒绝启动。这个计数器存储在 HSM 中,软件层改不了。
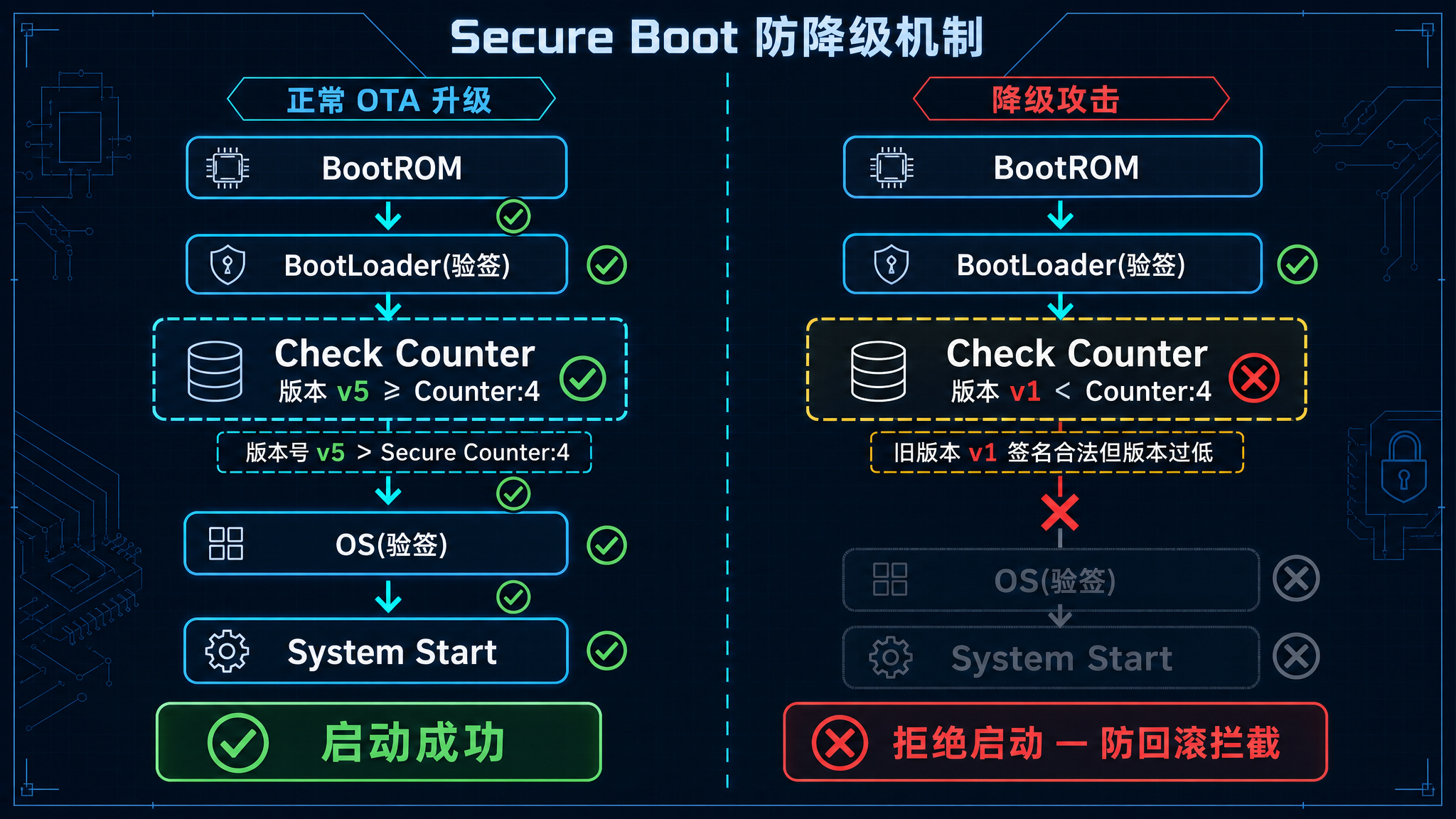
text
合法升级:BootROM → BootLoader(验签) → 检查Counter → OS(验签) → 启动
降级攻击:BootROM → BootLoader(验签通过) → Counter(2) > 旧版本(1) → ❌ 拒绝坑 6:HSM 密钥管理搞成了运维噩梦
现象:量产三个月后,发现 ECU 固件签名的密钥找不到了------不知道存在哪个 HSM 里,也不知道有几个版本,轮换记录一片空白。
原因 :一开始用 HSM 做了密钥生成,但密钥的管理全靠手工:谁建的密钥、什么用途、有效期多久、到期怎么轮换,全凭"上一个离职的人交接时说"。这让自动驾驶算法防逆向的密钥保护体系形同虚设。
解法 :引入 KSP 密钥管理系统,把密钥纳入全生命周期管理:
| 阶段 | 做什么 | 自动化? |
|---|---|---|
| 生成 | HSM 物理噪声源生成,根密钥永不导出 | ✅ |
| 存储 | 三级密钥体系,KEK 保护 DEK | ✅ |
| 分发 | 按项目/角色授权,绑定 UKEY 二次核验 | ✅ |
| 轮换 | 定时/事件触发,版本自动递增 | ✅ |
| 归档 | 停用密钥自动归档,保留历史版本 | ✅ |
| 销毁 | 安全删除,不可恢复 | ✅ |
密钥操作全部留下审计日志,谁在什么时间用了哪个密钥做签名,一查就出来。
坑 7:固件签名私钥明文导出,一次泄露牵连整个产品线
现象:Tier 1 供应商的开发环境被入侵,ECU 固件签名私钥被窃取。攻击者可以用这个私钥给任意恶意固件签名,所有已售车辆都成了待宰羔羊。
原因 :私钥在 HSM 里生成后,为了"方便"开发调试被运维人员导出到了本地文件。私钥一旦离开 HSM,就失去了硬件级保护。自动驾驶算法防逆向的根基------签名私钥------就这样裸奔了。这是等保和密评中明确禁止的操作。
解法:
- 密钥永不导出:签名运算在 HSM 内部完成,API 只接受 "用 label X 给数据签名" 的请求,不提供"导出私钥"的接口
- 多 UKEY 控制:关键操作(签名、生成密钥)需要同时插入指定的 UKEY 做二次身份核验
- 项目隔离:不同 ECU 型号使用不同的签名密钥,按项目维度隔离,一个泄露不至于全盘皆输
python
# 伪代码:正确的 HSM 签名流程(私钥始终在 HSM 内)
def sign_firmware(firmware_binary, key_label="ecu-v2-sign-key"):
# 1. 先插入 UKEY 做身份验证
ukey_verify(user_pin="****", container="AnDangECCContainer")
# 2. 调用 HSM 内部签名(私钥永不出现)
# HSM API 只返回签名结果,不返回私钥
signature = hsm_sign(
data=sha256(firmware_binary),
key_label=key_label,
algorithm="SM2"
)
# 3. 签名结果 + 证书一起打包
return firmware_binary + signature + get_cert(key_label)实战代码片段
环境说明
以下代码基于 Python 3.10+,依赖 cryptography 库(42.0+)。实际量产场景中自动驾驶数据加密存储的加密运算应通过 HSM SDK 或 KADP SDK 调用硬件加速。
1. 自动驾驶传感器数据的字段级加密
python
"""
场景:行车记录仪采集的视频帧中包含人脸/车牌,入库前加密
环境:Python 3.10 + cryptography 42.0
注:生产环境应替换为 HSM 硬件加密
"""
import os
import json
from base64 import b64encode, b64decode
from cryptography.hazmat.primitives.ciphers import Cipher, algorithms, modes
from cryptography.hazmat.primitives import padding
# ─── 加密配置 ───
# 实际场景中 DEK 由 KSP 管理,KEK 在 HSM 内
DEK = os.urandom(32) # AES-256 工作密钥(生产中由 KSP 下发)
IV = os.urandom(16) # 初始化向量
def encrypt_field(plaintext: str) -> str:
"""加密单条敏感字段,返回 base64 密文"""
padder = padding.PKCS7(128).padder()
padded = padder.update(plaintext.encode()) + padder.finalize()
cipher = Cipher(algorithms.AES(DEK), modes.CBC(IV))
encryptor = cipher.encryptor()
return b64encode(encryptor.update(padded) + encryptor.finalize()).decode()
def decrypt_field(ciphertext_b64: str) -> str:
"""解密 base64 密文"""
cipher = Cipher(algorithms.AES(DEK), modes.CBC(IV))
decryptor = cipher.decryptor()
padded = decryptor.update(b64decode(ciphertext_b64)) + decryptor.finalize()
unpadder = padding.PKCS7(128).unpadder()
return (unpadder.update(padded) + unpadder.finalize()).decode()
# ─── 使用示例 ───
sensor_record = {
"frame_id": "CAM-FRONT-0012847",
"timestamp": 1712345678.432,
"gps": encrypt_field("31.2304,121.4737"), # FPE模式更优
"plate_number": encrypt_field("沪A·88888"), # 车牌加密
"face_feature": encrypt_field("[128维向量base64]"), # 人脸特征加密
# 非敏感字段明文存储
"speed_kmh": 68.5,
"steering_deg": -2.3,
}
print(json.dumps(sensor_record, indent=2))2. ECU 固件签名与验签
python
"""
场景:OTA 升级包签名,车端验签后安装
注:实际使用 SM2/RSA 私钥从不离开 HSM
"""
import hashlib
from cryptography.hazmat.primitives import hashes
from cryptography.hazmat.primitives.asymmetric import rsa, padding as asym_padding
# ─── 云端签名 ───(私钥在 HSM 内,此处用本地 RSA 模拟)
def sign_firmware(firmware_path: str, private_key) -> bytes:
with open(firmware_path, "rb") as f:
firmware_bytes = f.read()
digest = hashlib.sha256(firmware_bytes).digest()
signature = private_key.sign(
digest,
asym_padding.PKCS1v15(),
hashes.SHA256()
)
return signature
# ─── 车端验签 ───
def verify_firmware(firmware_path: str, signature: bytes, public_key) -> bool:
with open(firmware_path, "rb") as f:
firmware_bytes = f.read()
digest = hashlib.sha256(firmware_bytes).digest()
try:
public_key.verify(signature, digest, asym_padding.PKCS1v15(), hashes.SHA256())
return True
except Exception:
return False
# ─── 防降级检查 ───
def check_rollback(firmware_version: int, secure_counter: int) -> bool:
"""Secure Counter 防回滚"""
return firmware_version >= secure_counter
# 使用
fw_ver = 5
counter = 4 # HSM 中存储的安全计数器
if check_rollback(fw_ver, counter):
fw_path = "ota_bundle_v5.bin"
if verify_firmware(fw_path, sig, pub_key):
print("✅ 验签通过,开始安装")
# hsm_increment_counter() # 安装成功后计数器+1
else:
print("❌ 签名无效,拒绝安装")
else:
print("❌ 版本回滚,拒绝安装")选型对比
自动驾驶数据加密方案 vs 算法防逆向方案怎么选?
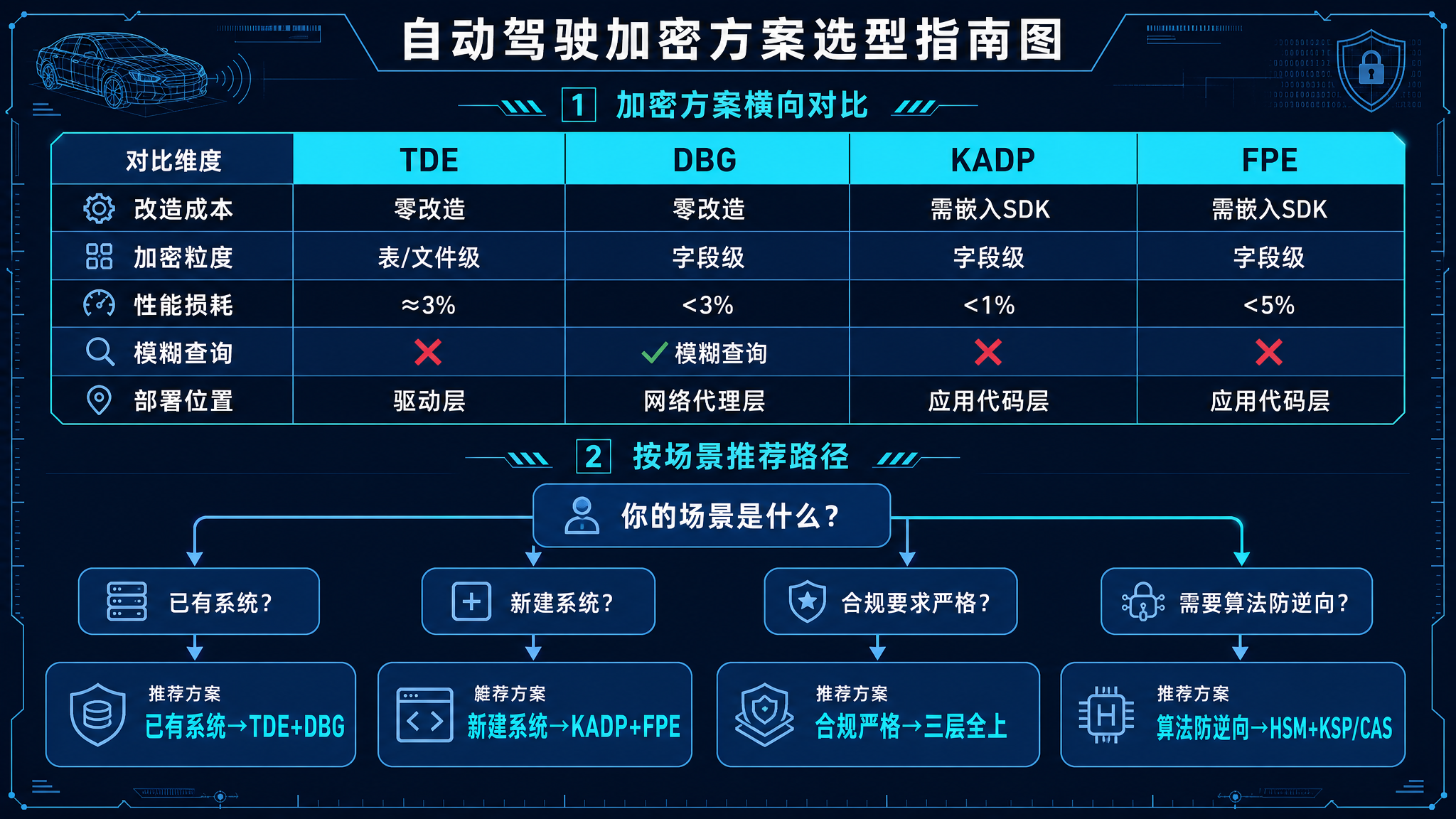
| 维度 | TDE 透明加密 | DBG 加密网关 | KADP 应用层 SDK | FPE 保留格式加密 |
|---|---|---|---|---|
| 改造成本 | 零改造 | 零改造 | 需要嵌入 SDK | 需要嵌入 SDK |
| 加密粒度 | 表/文件级 | 字段级 | 字段级 | 字段级 |
| 性能损耗 | ≈ 3% | < 3% | < 1%(本地运算) | < 5% |
| 模糊查询 | ❌ | ✅ | ❌ | ❌ |
| 典型场景 | 数据库文件防拖库 | 敏感字段动态脱敏 | 交易/身份数据加密 | GPS/身份证号加密 |
| 部署位置 | 驱动层 | 网络代理层 | 应用代码层 | 应用代码层 |
推荐
| 你的场景 | 推荐方案 |
|---|---|
| 已有系统,自动驾驶数据加密存储零改造需求 | TDE (兜底)+ DBG(字段级加密时叠一层) |
| 新建系统,有开发资源 | KADP + FPE,灵活可控 |
| 合规审计特别严格 | 三层全上:TDE → DBG → KADP |
| 自动驾驶算法防逆向(固件签名与Secure Boot) | HSM + KSP/CAS 密钥管理体系,实现自动驾驶算法防逆向全链路防护 |
说到底,自动驾驶数据加密存储 没有银弹。先做资产盘点,再选方案,不要在裸数据上直接上 AES 。自动驾驶算法防逆向的关键则在于密钥体系的规范化管理,两者缺一不可。
总结
回到开头的问题:自动驾驶数据加密存储 怎么做才既安全又不崩性能?自动驾驶算法防逆向应该从哪些环节入手?
答案是两条腿走路------自动驾驶数据加密存储 靠分级加密方案 + 自动驾驶算法防逆向靠签名链防护,而两者共同的根基是一套规范化的密钥管理体系:
text
数据加密选型 → 场景决定粒度(TDE 兜底 / DBG 脱敏 / KADP 字段级 / FPE 保格式)
算法防护标准 → Secure Boot 链 + HSM 签名 + 防降级 Counter
密钥管理底线 → 三级密钥体系 + HSM 硬件保护 + 永不导出私钥 + 全生命周期审计7 个坑,有技术层面的(加密后查询慢、FPE 选型),有管理层面的(密钥交接混乱、脱敏遗漏),也有合规层面的(BYOK 跨境)。避开了,至少省半年 Debug 时间。
关注安当加密技术,获取更多汽车信息安全实战内容。有问题欢迎评论区交流。