视场角约束下的多无人机三维预设时间协同制导律
摘要:针对多飞翼无人机在三维空间内拦截静止目标的协同攻击问题,本文提出了一种考虑严密物理约束的预设时间协同制导律。现有固定时间协同制导律存在收敛时间难以显式指定、易受控制增益耦合影响且末端易发指令抖振的缺陷。为解决上述问题,本文基于经典三维纯比例导引(PNG)架构,通过设计非线性协同偏置项主动调控剩余飞行时间,使时间一致性误差在预先设定的时间内归零。针对无人机机动等待过程中的导引头视场角极限,设计了状态依赖的局部软墙惩罚函数,以限制横向机动幅度。进一步,通过构造时间分歧势函数作为类 Lyapunov 函数,证明了局部异构约束未破坏系统稳定性,且赋予了闭环误差系统在无向连通拓扑下抗单点饱和的分布式鲁棒耗散特性。对比仿真结果表明,所提方法确保了时间误差的预设时间收敛,有效消除了传统固定时间方法在拦截末段的指令高频抖振现象,具备良好的工程应用可行性。
关键词:协同制导;预设时间控制;视场角约束;三维比例导引;Lyapunov稳定性;多智能体系统
1. 引言
多无人机协同攻击要求编队在同一时刻或按预定时间间隔从多方向对目标实施饱和打击,以提升突防概率与毁伤效能。在各类协同制导策略中,基于剩余飞行时间反馈的一致性协议因其结构清晰且易于与经典比例导引架构融合,已成为该领域的重要研究方向。
由于导弹拦截是一个终端时间固定的有限域过程,早期广泛采用的线性一致性协议仅具备渐近收敛特性,无法保证在命中时刻前时间误差严格归零。为满足时序约束,有限时间控制理论被引入协同制导设计,但其收敛时间上界依赖系统初始状态,导致在动态多变的战场环境中鲁棒性不足。随后,固定时间控制理论被提出并应用,其收敛时间上界与初始状态解耦。尽管如此,固定时间方法仍存在两方面局限:首先,其收敛时间上界通常是控制增益和网络连通度等参数的隐函数,导致参数整定过程复杂;其次,为保证在原点附近的快速收敛,固定时间控制律往往包含分数次幂项,易在拦截末段(误差趋近零时)引起指令高频抖振,甚至诱发控制奇异性。
预设时间控制理论允许将期望的收敛时间 tmt_mtm 作为显式参数直接嵌入控制律中,实现了收敛时间与控制增益的解耦。然而,将该理论推广至实际的三维协同制导问题时,面临复杂的物理约束挑战。对于采用捷联导引头的飞翼无人机,大过载横向机动易导致目标偏离导引头的最大探测视场角(Field-of-View, FOV),进而引发制导回路失效。
本文针对多无人机三维空间协同拦截问题,提出了一种考虑 FOV 约束的预设时间协同制导律。主要贡献如下:
- 提出了一种基于任意时间控制器架构的三维预设时间协同制导律。该方法实现了收敛时间 tmt_mtm 的显式设定,且在误差趋零时指令平滑退化,消除了固定时间方法在命中末段的指令抖振现象。
- 设计了非线性视场角惩罚函数,并引入"时间分歧势函数"作为类 Lyapunov 函数。该证明架构将局部异构约束转化为正定耗散项的局部权重,在无向连通拓扑下给出了预设时间收敛证明,揭示了算法抗单点饱和的分布式鲁棒机制。
- 结合三维相对运动学与无人机机动能力极限,定量推导了预设时间 tmt_mtm 的物理可行区间,为工程参数整定提供了理论依据。
2. 基础知识与问题描述
2.1 协同通信网络的图论表示
多无人机系统间的信息交互拓扑通过代数图论描述。设包含 NNN 架无人机的协同网络通信拓扑由无向图 G=(V,E,A)\mathcal{G} = (\mathcal{V}, \mathcal{E}, \boldsymbol{A})G=(V,E,A) 表示。
其中,V={1,2,...,N}\mathcal{V} = \{1, 2, \dots, N\}V={1,2,...,N} 为无人机节点集合,E⊆V×V\mathcal{E} \subseteq \mathcal{V} \times \mathcal{V}E⊆V×V 为通信链路边集。
邻接矩阵 A=aij∈RN×N\boldsymbol{A} = a_{ij} \in \mathbb{R}^{N \times N}A=aij∈RN×N 描述连接状态:若节点 iii 与 jjj 存在通信链路,则 aij=aji=1a_{ij} = a_{ji} = 1aij=aji=1;否则 aij=0a_{ij} = 0aij=0。设 aii=0a_{ii} = 0aii=0。
图 G\mathcal{G}G 的度矩阵定义为对角阵 D=diag{d1,d2,...,dN}\boldsymbol{D} = \text{diag}\{d_1, d_2, \dots, d_N\}D=diag{d1,d2,...,dN},节点 iii 的度为 di=∑j=1Naijd_i = \sum_{j=1}^N a_{ij}di=∑j=1Naij。拉普拉斯矩阵定义为 L=D−A\boldsymbol{L} = \boldsymbol{D} - \boldsymbol{A}L=D−A。
引理 1 :对于无向连通图 G\mathcal{G}G,其拉普拉斯矩阵 L\boldsymbol{L}L 为实对称半正定矩阵。最小特征值 λ1=0\lambda_1 = 0λ1=0 对应特征向量 1=1,...,1T\boldsymbol{1} = 1, \\dots, 1^T1=1,...,1T;代数连通度由第二小特征值 λ2>0\lambda_2 > 0λ2>0 决定。对于任意满足 ∑i=1Nxi=0\sum_{i=1}^N x_i = 0∑i=1Nxi=0(即 xT1=0\boldsymbol{x}^T \boldsymbol{1} = 0xT1=0)的向量 x∈RN\boldsymbol{x} \in \mathbb{R}^Nx∈RN,有 xTLx≥λ2xTx\boldsymbol{x}^T \boldsymbol{L} \boldsymbol{x} \ge \lambda_2 \boldsymbol{x}^T \boldsymbol{x}xTLx≥λ2xTx。
2.2 三维相对运动学模型
设第 iii 架无人机位置为 pi=xi,yi,ziT\boldsymbol{p}_i = x_i, y_i, z_i^Tpi=xi,yi,ziT,速度矢量为 vi\boldsymbol{v}_ivi。假设无人机以恒定速率 ViV_iVi 飞行,其三维质点运动学方程为:
{x˙i=Vicosγicosχiy˙i=Vicosγisinχiz˙i=Visinγi \begin{cases} \dot{x}_i = V_i \cos\gamma_i \cos\chi_i \\ \dot{y}_i = V_i \cos\gamma_i \sin\chi_i \\ \dot{z}_i = V_i \sin\gamma_i \end{cases} ⎩ ⎨ ⎧x˙i=Vicosγicosχiy˙i=Vicosγisinχiz˙i=Visinγi
其中,γi\gamma_iγi 与 χi\chi_iχi 分别为航迹倾角和偏航角。
定义相对距离矢量 ri=pt−pi\boldsymbol{r}_i = \boldsymbol{p}_t - \boldsymbol{p}_iri=pt−pi,相对距离标量 ri=∥ri∥r_i = \|\boldsymbol{r}_i\|ri=∥ri∥。速度矢量与视线矢量间的夹角定义为总前置角 σi\sigma_iσi(导引头视场角),满足:
cosσi=vi⋅riViri \cos\sigma_i = \frac{\boldsymbol{v}_i \cdot \boldsymbol{r}_i}{V_i r_i} cosσi=Virivi⋅ri
视线角速率矢量为 Ωi=ri×(−vi)ri2\boldsymbol{\Omega}_i = \frac{\boldsymbol{r}_i \times (-\boldsymbol{v}_i)}{r_i^2}Ωi=ri2ri×(−vi)。经典三维纯比例导引(PNG)以零脱靶量为目标,基准法向加速度指令为:
apng,i=Npn(Ωi×vi) \boldsymbol{a}{png, i} = N{pn} (\boldsymbol{\Omega}_i \times \boldsymbol{v}_i) apng,i=Npn(Ωi×vi)
其中 NpnN_{pn}Npn 为比例导引常数。
2.3 剩余飞行时间估计与动态误差模型
精确估计剩余飞行时间 tgot_{go}tgo 是实现三维空间协同拦截的基础。考虑比例导引律引起的弹道弯曲效应,第 iii 架无人机的剩余飞行时间可通过如下公式近似:
tgo,i=riVi1+sin2σi2(2Npn−1) t_{go, i} = \frac{r_i}{V_i} \left 1 + \\frac{\\sin\^2\\sigma_i}{2(2N_{pn}-1)} \\right tgo,i=Viri1+2(2Npn−1)sin2σi
为建立 tgo,it_{go, i}tgo,i 的动态演化方程,将上式沿系统轨迹对时间 ttt 求导:
t˙go,i=r˙iVi1+sin2σi2(2Npn−1)+risinσicosσi(2Npn−1)Viσ˙i \dot{t}_{go, i} = \frac{\dot{r}i}{V_i} \left 1 + \\frac{\\sin\^2\\sigma_i}{2(2N_{pn}-1)} \\right + \frac{r_i \sin\sigma_i \cos\sigma_i}{(2N{pn}-1)V_i} \dot{\sigma}_i t˙go,i=Vir˙i1+2(2Npn−1)sin2σi+(2Npn−1)Virisinσicosσiσ˙i
在纯比例导引(PNG)制导律下,相对运动学满足 r˙i=−Vicosσi\dot{r}_i = -V_i \cos\sigma_ir˙i=−Vicosσi 以及 σ˙i=−(Npn−1)Visinσiri\dot{\sigma}i = -\frac{(N{pn}-1)V_i \sin\sigma_i}{r_i}σ˙i=−ri(Npn−1)Visinσi。将其代入上式,并考虑到在拦截末段前置角较小,采用泰勒展开进行截断近似(cosσi≈1−12sin2σi\cos\sigma_i \approx 1 - \frac{1}{2}\sin^2\sigma_icosσi≈1−21sin2σi),忽略四阶及以上的高阶无穷小项后,可得纯 PNG 作用下的自然演化率:
t˙go,i≈−1 \dot{t}_{go, i} \approx -1 t˙go,i≈−1
该结果表明,在理想情况下,剩余飞行时间随物理时间呈线性自然衰减。为实现多机的到达时间协同,需在基准法向加速度上引入协同偏置加速度 acoop,ia_{coop, i}acoop,i 以主动调控 tgo,it_{go, i}tgo,i。叠加偏置项后,前置角变化率更新为:
σ˙i=−(Npn−1)Visinσiri−acoop,iVi \dot{\sigma}i = - \frac{(N{pn}-1)V_i \sin\sigma_i}{r_i} - \frac{a_{coop, i}}{V_i} σ˙i=−ri(Npn−1)Visinσi−Viacoop,i
将其重新代入 t˙go,i\dot{t}_{go, i}t˙go,i 的求导公式,可得受控状态下的演化方程:
t˙go,i=−1+ui \dot{t}_{go, i} = -1 + u_i t˙go,i=−1+ui
其中,uiu_iui 为虚拟时间扰动控制量,其与物理层面的协同偏置加速度 acoop,ia_{coop, i}acoop,i 存在如下非线性映射关系:
ui=−risinσicosσi(2Npn−1)Vi2acoop,i≈−risinσi(2Npn−1)Vi2acoop,i u_i = - \frac{r_i \sin\sigma_i \cos\sigma_i}{(2N_{pn}-1)V_i^2} a_{coop, i} \approx - \frac{r_i \sin\sigma_i}{(2N_{pn}-1)V_i^2} a_{coop, i} ui=−(2Npn−1)Vi2risinσicosσiacoop,i≈−(2Npn−1)Vi2risinσiacoop,i
(在此引入了小前置角近似 cosσi≈1\cos\sigma_i \approx 1cosσi≈1)。
在无向通信拓扑 G\mathcal{G}G 下,第 iii 架无人机的局部时间一致性误差 eie_iei 定义为该节点与其邻居节点剩余飞行时间的加权偏差之和:
ei=∑j=1Naij(tgo,i−tgo,j) e_{i} = \sum_{j=1}^N a_{ij} (t_{go, i} - t_{go, j}) ei=j=1∑Naij(tgo,i−tgo,j)
定义全局时间向量 T=tgo,1,...,tgo,NT\boldsymbol{T} = t_{go,1}, \\dots, t_{go,N}^TT=tgo,1,...,tgo,NT 与全局误差向量 e=e1,...,eNT\boldsymbol{e} = e_1, \\dots, e_N^Te=e1,...,eNT。基于拉普拉斯矩阵 L\boldsymbol{L}L 的代数特性,局部误差标量可统一重构为全局误差系统的动态演化形式:
e˙=LT˙=L(−1+u)=Lu \dot{\boldsymbol{e}} = \boldsymbol{L} \dot{\boldsymbol{T}} = \boldsymbol{L} (-\boldsymbol{1} + \boldsymbol{u}) = \boldsymbol{L} \boldsymbol{u} e˙=LT˙=L(−1+u)=Lu
至此,三维空间协同制导任务被转化为:设计虚拟控制输入向量 u\boldsymbol{u}u,并逆向解算物理偏置加速度 acoop,ia_{coop, i}acoop,i,以保证闭环误差系统在预设时间 tmt_mtm 内满足 limt→tme(t)=0\lim_{t \to t_m} \boldsymbol{e}(t) = \boldsymbol{0}limt→tme(t)=0。
3. 预设时间协同制导律设计与分析
3.1 视场角软墙惩罚函数设计
在协同机动过程中,若无人机为调控剩余飞行时间而执行大过载横向绕飞,极易导致目标偏离导引头的有效探测区域。为确保全飞行过程满足 ∣σi∣<σmax|\sigma_i| < \sigma_{\max}∣σi∣<σmax 的视场角约束,本文在协同控制律中引入状态依赖的非线性"软墙"惩罚机制。
1. 惩罚函数的数学性质要求
为满足系统物理约束与稳定性证明需求,惩罚函数 ϕ(σi)\phi(\sigma_i)ϕ(σi) 需具备以下四项核心性质:
- 性质 1(边界强制性) :当 ∣σi∣→σmax|\sigma_i| \to \sigma_{\max}∣σi∣→σmax 时,ϕ(σi)→0\phi(\sigma_i) \to 0ϕ(σi)→0。此特性保证在逼近物理边界时,协同偏置机动指令被彻底切断,系统退化为纯比例导引,迫使前置角收敛。
- 性质 2(原点无损性) :当 σi=0\sigma_i = 0σi=0 时,ϕ(0)=1\phi(0) = 1ϕ(0)=1。保证在视线方向上协同控制能量无损耗,无人机可发挥全部机动能力。
- 性质 3(平坦区间与光滑性):在原点邻域内导数趋近于零,避免对小误差区间的协同控制产生干扰;同时函数需具备连续光滑性以抑制指令高频抖振。
- 性质 4(单调耗散性) :在 [0,σmax)[0, \sigma_{\max})[0,σmax) 区间内单调递减,确保逼近危险区域时协同能力加速衰减。
2. 幂次型软墙函数的参数优化
综合上述要求,相比于计算复杂的对数障碍函数,本文构造如下极简的高阶幂次型软墙函数:
ϕ(σi)={1−∣σiσmax∣k,∣σi∣<σmax0,∣σi∣≥σmax \phi(\sigma_i) = \begin{cases} 1 - \left| \frac{\sigma_i}{\sigma_{\max}} \right|^k, & |\sigma_i| < \sigma_{\max} \\ 0, & |\sigma_i| \ge \sigma_{\max} \end{cases} ϕ(σi)=⎩ ⎨ ⎧1− σmaxσi k,0,∣σi∣<σmax∣σi∣≥σmax
其中,指数 k>1k > 1k>1 为调节软墙"刚度"的设计参数。若 kkk 较小(如 k=2k=2k=2),惩罚函数在小视场角区间存在明显衰减,违背平坦性要求;若 k→∞k \to \inftyk→∞,函数退化为理想"硬墙",其在边界处的指令阶跃易激发执行机构动态延迟并破坏系统稳定性。
为在控制效率(原点平坦度)与指令平滑性间取得最佳折中,本文选取 k=6k = 6k=6 作为基础设计参数。具体形式为:
ϕ(σi)={1−(σiσmax)6,∣σi∣<σmax0,∣σi∣≥σmax \phi(\sigma_i) = \begin{cases} 1 - \left( \frac{\sigma_i}{\sigma_{\max}} \right)^6, & |\sigma_i| < \sigma_{\max} \\ 0, & |\sigma_i| \ge \sigma_{\max} \end{cases} ϕ(σi)=⎩ ⎨ ⎧1−(σmaxσi)6,0,∣σi∣<σmax∣σi∣≥σmax
该设计在 ∣σi∣∈0,0.5σmax|\sigma_i| \in 0, 0.5\\sigma_{\\max}∣σi∣∈0,0.5σmax 区间内保证 ϕ≥0.98\phi \ge 0.98ϕ≥0.98,维持了极高的协同效率,同时在逼近边界时呈现平滑且迅速的衰减,精准契合了制导系统的物理约束要求。
3.2 基于预设时间的控制律与加速度指令
定义局部软墙惩罚函数 ϕi(t)≜ϕ(σi(t))\phi_i(t) \triangleq \phi(\sigma_i(t))ϕi(t)≜ϕ(σi(t)),设计预设时间协同偏置控制律为:
ui=−ηtm−t(1−exp(−ei))ϕi(t) u_i = -\frac{\eta}{t_m - t}\big(1-\exp(-e_i)\big)\phi_i(t) ui=−tm−tη(1−exp(−ei))ϕi(t)
其中 η>0\eta > 0η>0 为控制增益,tmt_mtm 为预设收敛时间。该控制律基于局部异构惩罚函数 ϕi(t)\phi_i(t)ϕi(t),属于完全分布式架构。
将虚拟控制律代入非线性物理映射方程,解算协同偏置法向加速度标量:
acoop,i=η(2Npn−1)Vi2risinσi(tm−t)(1−exp(−ei))ϕi(t) \boxed{a_{coop, i} = \frac{\eta (2N_{pn}-1)V_i^2}{r_i \sin\sigma_i (t_m - t)} \big(1 - \exp(-e_i)\big)\phi_i(t)} acoop,i=risinσi(tm−t)η(2Npn−1)Vi2(1−exp(−ei))ϕi(t)
三维合成加速度指令由比例导引基础项与协同偏置项构成:
acmd,i=apng,i+acoop,iapng,i∥apng,i∥ \boldsymbol{a}{cmd, i} = \boldsymbol{a}{png, i} + a_{coop, i} \frac{\boldsymbol{a}{png, i}}{\|\boldsymbol{a}{png, i}\|} acmd,i=apng,i+acoop,i∥apng,i∥apng,i
3.3 预设收敛时间 tmt_mtm 的物理可行区间
在纯理论控制框架中,预设时间 tmt_mtm 通常被假设为任意正常数。然而,在三维实体无人机协同制导场景中,tmt_mtm 的取值严格受限于最大法向过载 amaxa_{\max}amax 与导引头视场角 σmax\sigma_{\max}σmax。为避免指令饱和与视场越界,tmt_mtm 必须位于由物理极限制约的有效区间内。需要明确的是,tmt_mtm 代表时间一致性误差归零的时刻,而非最终的命中时刻。
1. 基于视场角与运动学极限的下界 tmmint_m^{\min}tmmin
下界 tmmint_m^{\min}tmmin 反映了系统消除初始最大时间偏差的最短物理耗时。考虑极端的双机博弈场景:剩余时间最大的"落后机"沿视线直线飞行(前置角趋零,t˙go=−1\dot{t}{go} = -1t˙go=−1)以最快逼近目标;剩余时间最小的"领先机"则贴近视场角边界 σmax\sigma{\max}σmax 进行横向绕飞(t˙go=−cosσmax\dot{t}{go} = -\cos\sigma{\max}t˙go=−cosσmax)以等待队友。
在该极限状态下,时间差值的最大收敛速率为 ∣Δt˙go∣=1−cosσmax|\dot{\Delta t}{go}| = 1 - \cos\sigma{\max}∣Δt˙go∣=1−cosσmax。消除初始最大时间差异所需的理论最短飞行时间构成了系统的保守物理下界:
tmmin=maxi,j∈V{tgo,i(0)−tgo,j(0)}1−cosσmax t_m^{\min} = \frac{\max_{i,j \in \mathcal{V}} \{ t_{go,i}(0) - t_{go,j}(0) \}}{1 - \cos\sigma_{\max}} tmmin=1−cosσmaxmaxi,j∈V{tgo,i(0)−tgo,j(0)}
2. 基于等待能力极限的上界 tmmaxt_m^{\max}tmmax
若设定的 tmt_mtm 偏大,领先机在漫长的等待过程中将耗尽机动裕度,引发视场角越界或触发软墙惩罚(ϕ→0\phi \to 0ϕ→0),导致协同网络破裂。
领先机的最大延时能力取决于其贴近视场角边界 σmax\sigma_{\max}σmax 飞行的持续时间。其沿视线方向的最小接近速度为 VicosσmaxV_i \cos\sigma_{\max}Vicosσmax,对应单机最长飞行时间为 ri(0)/(Vicosσmax)r_i(0)/(V_i \cos\sigma_{\max})ri(0)/(Vicosσmax)。为确保编队内所有节点均不越界,系统最大等待时间受限于等待能力最弱的节点。扣除末端纯比例导引所需的收敛裕度 Δt>0\Delta t > 0Δt>0 后,合理的运动学上界确定为:
tmmax=mini∈V{ri(0)Vicosσmax}−Δt t_m^{\max} = \min_{i \in \mathcal{V}} \left\{ \frac{r_i(0)}{V_i \cos\sigma_{\max}} \right\} - \Delta t tmmax=i∈Vmin{Vicosσmaxri(0)}−Δt
3. 综合可行区间与初始误差约束
综上所述,预设收敛时间 tmt_mtm 的物理可行区间为 tm∈tmmin, tmmaxt_m \in \left t_m\^{\\min}, \\, t_m\^{\\max} \\righttm∈tmmin,tmmax。
需要特别指出的是,该可行区间的存在性(即 tmmax≥tmmint_m^{\max} \ge t_m^{\min}tmmax≥tmmin)与系统初始状态的误差上限 MMM 存在着底层的物理耦合。在李雅普诺夫稳定性分析中,系统的最大误差界 MMM 由初始分歧势能 V(T(0))V(\boldsymbol{T}(0))V(T(0)) 严格决定(M∝V(0)M \propto \sqrt{V(0)}M∝V(0) )。当初始态势极度恶劣导致 MMM 极大时,消除该误差所需的最短时间 tmmint_m^{\min}tmmin 将急剧增加。一旦初始误差 MMM 超过了物理系统在极限机动下所能弥补的最大时间差,必然会导致 tmmin>tmmaxt_m^{\min} > t_m^{\max}tmmin>tmmax。
此时,区间失效,表明该初始态势超出了当前无人机机动能力(过载与视场角约束)的物理可解集,任何控制律都无法在不破坏约束的前提下实现时间协同。反之,只要初始误差 MMM 在合理范围内使得区间有效,设计者即可在区间内自由选取 tmt_mtm(工程上通常选取略小于 tmmaxt_m^{\max}tmmax 的值),控制律将确保误差在预设时间内严格耗散至零。
3.4 闭环系统预设时间收敛性证明
引理 2(FOV约束集的前向不变性) :在所提控制律作用下,若初始状态满足 ∣σi(0)∣<σmax|\sigma_i(0)| < \sigma_{\max}∣σi(0)∣<σmax (∀i∈V\forall i \in \mathcal{V}∀i∈V)且预设时间 tm∈tmmin,tmmaxt_m \in t_m\^{\\min}, t_m\^{\\max}tm∈tmmin,tmmax,则安全视场角集合 S={σ∈RN:∣σi∣<σmax,∀i}\mathcal{S} = \{\boldsymbol{\sigma} \in \mathbb{R}^N : |\sigma_i| < \sigma_{\max}, \forall i\}S={σ∈RN:∣σi∣<σmax,∀i} 是前向不变的。
证明 :当某一节点 kkk 的视场角逼近物理边界,即 ∣σk∣→σmax|\sigma_k| \to \sigma_{\max}∣σk∣→σmax 时,由软墙惩罚函数定义必有 ϕk(t)→0\phi_k(t)\to 0ϕk(t)→0,进而使得协同偏置指令 uk→0u_k \to 0uk→0。此时,系统在该节点的横向机动控制被自动切断,完全退化为经典的纯比例导引状态。其前置角的运动学微分方程简化为:
σ˙k=−(Npn−1)Vksinσkrk \dot{\sigma}k = -\frac{(N{pn}-1)V_k\sin\sigma_k}{r_k} σ˙k=−rk(Npn−1)Vksinσk
考虑到在实际制导过程中 Npn≥3>1N_{pn} \ge 3 > 1Npn≥3>1,且在逼近非零边界时 sinσk≠0\sin\sigma_k \neq 0sinσk=0,上式表明 σ˙k\dot{\sigma}_kσ˙k 的符号必然与 σk\sigma_kσk 相反。这意味着在系统边界处,状态向量场严格指向约束集 S\mathcal{S}S 的内部。根据非线性系统理论中关于集合前向不变性的 Nagumo 定理,不存在有限时刻使得系统轨迹能够穿越该边界,因此集合 S\mathcal{S}S 是前向不变的。
进一步地,由 S\mathcal{S}S 的前向不变性可知,必然存在一个依赖于初始状态的微小正数 δ>0\delta > 0δ>0,使得 ∣σi(t)∣≤σmax−δ|\sigma_i(t)| \le \sigma_{\max} - \delta∣σi(t)∣≤σmax−δ 在整个制导过程 t∈[0,tm)t \in [0, t_m)t∈[0,tm) 内对所有节点 iii 一致成立。据此,可定义一个严格大于零的系统级全局正下界:
ϕmin∗≜1−(σmax−δσmax)6>0 \phi_{\min}^* \triangleq 1 - \left(\frac{\sigma_{\max} - \delta}{\sigma_{\max}}\right)^6 > 0 ϕmin∗≜1−(σmaxσmax−δ)6>0
从而保证了 ϕi(t)≥ϕmin∗>0\phi_i(t) \ge \phi_{\min}^* > 0ϕi(t)≥ϕmin∗>0 恒成立。□\square□
定理 1(预设时间一致性) :针对多无人机系统,在无向连通图 G\mathcal{G}G 下,若 tm∈tmmin,tmmaxt_m \in t_m\^{\\min}, t_m\^{\\max}tm∈tmmin,tmmax 且控制增益 η>0\eta > 0η>0,则剩余飞行时间在 tmt_mtm 内收敛至一致状态,即 limt→tm−e(t)=0\lim_{t \to t_m^-} \boldsymbol{e}(t) = \boldsymbol{0}limt→tm−e(t)=0。
证明 :
(1) 构造势函数 :选取时间分歧势函数 V(T)=12TTLTV(\boldsymbol{T}) = \frac{1}{2} \boldsymbol{T}^T \boldsymbol{L} \boldsymbol{T}V(T)=21TTLT。由于拉普拉斯矩阵 L\boldsymbol{L}L 是实对称半正定矩阵,且对于连通图,其零空间仅为 span{1}\text{span}\{\boldsymbol{1}\}span{1},因此在一致性误差空间(即 1⊥\boldsymbol{1}^\perp1⊥ 流形)上,V(T)V(\boldsymbol{T})V(T) 是一个严格正定的类 Lyapunov 函数。
(2) 导数抵消 :沿系统轨迹对 VVV 求导,结合 e=LT\boldsymbol{e} = \boldsymbol{L}\boldsymbol{T}e=LT 和拉普拉斯矩阵的行和为零性质(1TL=0T ⟹ eT1=0\boldsymbol{1}^T \boldsymbol{L} = \boldsymbol{0}^T \implies \boldsymbol{e}^T \boldsymbol{1} = 01TL=0T⟹eT1=0),可得:
V˙=TTLT˙=eT(−1+u)=−eT1+eTu=eTu=∑i=1Neiui \dot{V} = \boldsymbol{T}^T \boldsymbol{L} \dot{\boldsymbol{T}} = \boldsymbol{e}^T (-\boldsymbol{1} + \boldsymbol{u}) = -\boldsymbol{e}^T \boldsymbol{1} + \boldsymbol{e}^T \boldsymbol{u} = \boldsymbol{e}^T \boldsymbol{u} = \sum_{i=1}^N e_i u_i V˙=TTLT˙=eT(−1+u)=−eT1+eTu=eTu=i=1∑Neiui
由自然时间流逝引起的漂移项 −1-\boldsymbol{1}−1 被网络拓扑的对称性完全消去。
(3) 负定性分析 :代入控制律得:
V˙=−ηtm−t∑i=1Nϕi(t)ei(1−e−ei) \dot{V} = -\frac{\eta}{t_m - t} \sum_{i=1}^N \phi_i(t) e_i (1 - e^{-e_i}) V˙=−tm−tηi=1∑Nϕi(t)ei(1−e−ei)
由于 ϕi(t)>0\phi_i(t) > 0ϕi(t)>0,且对任意 ei≠0e_i \neq 0ei=0,eie_iei 与 (1−e−ei)(1 - e^{-e_i})(1−e−ei) 符号相同,故 ei(1−e−ei)>0e_i(1 - e^{-e_i}) > 0ei(1−e−ei)>0。因此,对任意 e≠0\boldsymbol{e} \neq \boldsymbol{0}e=0 有 V˙≤0\dot{V} \le 0V˙≤0。
(4) 预设时间放缩 :由于 V˙≤0\dot{V} \le 0V˙≤0,系统势能有界 V(T(t))≤V(T(0))V(\boldsymbol{T}(t)) \le V(\boldsymbol{T}(0))V(T(t))≤V(T(0)),这意味着所有局部误差 eie_iei 均被限制在一个闭集 −M,M-M, M−M,M 内。此处的最大误差界 MMM 完全由系统的初始状态差值 V(T(0))V(\boldsymbol{T}(0))V(T(0)) 决定,即 M=2V(0)/λ2M = \sqrt{2V(0)/\lambda_2}M=2V(0)/λ2 。
构造连续辅助函数 g(x)=(1−e−x)/xg(x) = (1 - e^{-x})/xg(x)=(1−e−x)/x(规定 g(0)=1g(0)=1g(0)=1),在紧集 −M,M-M, M−M,M 上,g(x)g(x)g(x) 必存在严格大于零的最小值 ccc。具体而言,由于 g(x)g(x)g(x) 是单调递减函数,该下界在区间右端点取得,即 c=(1−e−M)/M>0c = (1 - e^{-M})/M > 0c=(1−e−M)/M>0。
由此可得不等式 ei(1−e−ei)≥cei2e_i (1 - e^{-e_i}) \ge c e_i^2ei(1−e−ei)≥cei2。结合引理 2 确定的全局正下界 ϕmin∗\phi_{\min}^*ϕmin∗,对 V˙\dot{V}V˙ 进行放缩:
V˙≤−ηtm−tϕmin∗c∑i=1Nei2=−ηtm−tϕmin∗c∥e∥2 \dot{V} \le -\frac{\eta}{t_m - t} \phi_{\min}^* c \sum_{i=1}^N e_i^2 = -\frac{\eta}{t_m - t} \phi_{\min}^* c \|\boldsymbol{e}\|^2 V˙≤−tm−tηϕmin∗ci=1∑Nei2=−tm−tηϕmin∗c∥e∥2
根据代数图论中关于拉普拉斯矩阵的性质,在 1⊥\boldsymbol{1}^\perp1⊥ 空间内有 ∥e∥2=TTL2T≥λ2TTLT=2λ2V\|\boldsymbol{e}\|^2 = \boldsymbol{T}^T \boldsymbol{L}^2 \boldsymbol{T} \ge \lambda_2 \boldsymbol{T}^T \boldsymbol{L} \boldsymbol{T} = 2\lambda_2 V∥e∥2=TTL2T≥λ2TTLT=2λ2V,代入上式得:
V˙≤−ηtm−t(ϕmin∗c⋅2λ2)V≜−η~tm−tV \dot{V} \le -\frac{\eta}{t_m - t} (\phi_{\min}^* c \cdot 2\lambda_2) V \triangleq -\frac{\tilde{\eta}}{t_m - t} V V˙≤−tm−tη(ϕmin∗c⋅2λ2)V≜−tm−tη~V
其中 η~=2cλ2ηϕmin∗>0\tilde{\eta} = 2 c \lambda_2 \eta \phi_{\min}^* > 0η~=2cλ2ηϕmin∗>0 为等效收敛增益。
(5) 预设时间到达 :对上述微分不等式分离变量并在 0,t0, t0,t 上积分得:
V(t)≤V(0)(tm−ttm)η~ V(t) \le V(0) \left( \frac{t_m - t}{t_m} \right)^{\tilde{\eta}} V(t)≤V(0)(tmtm−t)η~
当 t→tm−t \to t_m^-t→tm− 时,由于 η~>0\tilde{\eta} > 0η~>0,积分项指数衰减至零,即 limt→tm−V(T(t))=0 ⟹ limt→tm−e(t)=0\lim_{t \to t_m^-} V(\boldsymbol{T}(t)) = 0 \implies \lim_{t \to t_m^-} \boldsymbol{e}(t) = \boldsymbol{0}limt→tm−V(T(t))=0⟹limt→tm−e(t)=0。□\square□
机理分析 :闭环系统总耗散能量为局部耗散项的线性叠加。即使某节点局部机动饱和(ϕk→0\phi_k \to 0ϕk→0),其余节点(ϕj>0\phi_j > 0ϕj>0)仍持续提供收敛能量,揭示了算法抗单点饱和的分布式耗散特性。
4. 仿真分析
为验证所提方法的有效性,设计 4 架飞翼无人机在三维空间中拦截静止目标的仿真场景,并与基于最优误差动力学(Optimal-Error-Dynamics)的三维协同制导律进行对比。
仿真条件:V=250V = 250V=250 m/s,σmax=45∘\sigma_{\max} = 45^\circσmax=45∘,amax=5ga_{\max} = 5gamax=5g,Npn=3.0N_{pn} = 3.0Npn=3.0。目标位置设为 10000,10000,0T10000, 10000, 0^T10000,10000,0T m。初始态势下 tmmin=15.2t_m^{\min} = 15.2tmmin=15.2 s,tcoopmax=26.8t_{coop}^{\max} = 26.8tcoopmax=26.8 s,设定预设收敛时间 tm=20t_m = 20tm=20 s,非线性增益 η=1.5\eta = 1.5η=1.5;最优方法反馈增益 K=12.0K=12.0K=12.0。
4.1 视场角越界与轨迹演化分析
仿真结果表明,在初始时间偏差较大的恶劣态势下,两者的系统轨迹与视场角演化均能引导 4 架无人机命中目标。领先机需通过横向机动消耗飞行时间,落后机则采取近似直线弹道。
在导引头前置角演化中,由于本文方法与最优误差方法均引入了局部非线性软墙机制 ϕi(t)\phi_i(t)ϕi(t),在领先机的大过载绕飞导致视场角逼近 45∘45^\circ45∘ 边界时,乘性惩罚函数平滑地将协同偏置指令削减至零。使得领先机在该阶段退化为纯比例导引飞行,视场角被严格限制在物理边界内,有效规避了剧烈机动带来的目标丢失问题。
4.2 协同误差与能量耗散机制分析
在剩余飞行时间收敛过程中,本文方法下各无人机的时间一致性误差 eie_iei 呈现出与预设时间项 (tm−t)−1(t_m - t)^{-1}(tm−t)−1 强相关的加速收敛特性。
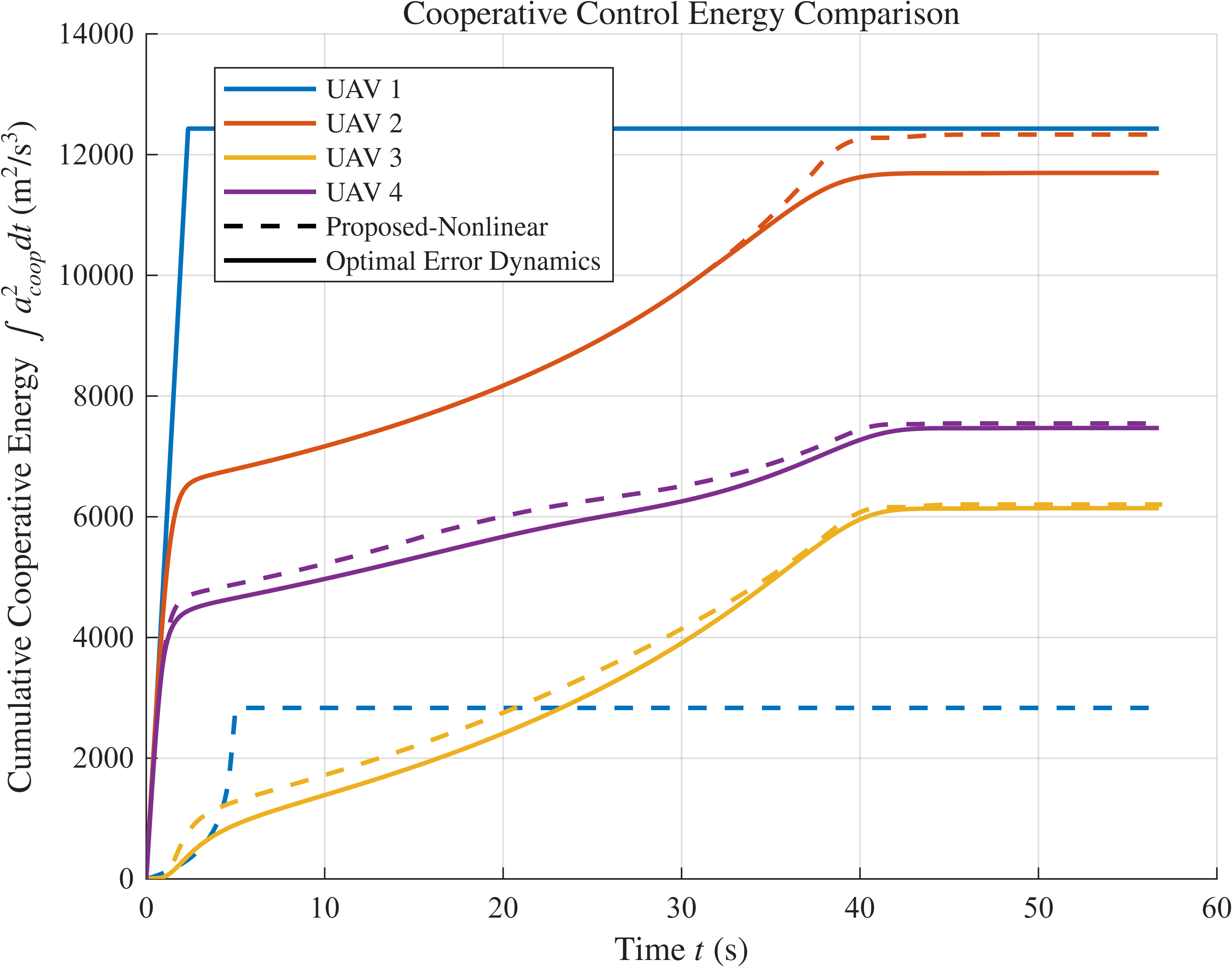
对比能量分配(控制能量积分 ∫a2dt\int a^2 dt∫a2dt 与偏置能量积分 ∫acoop2dt\int a_{coop}^2 dt∫acoop2dt),本文方法由于引入了 (1−exp(−ei))(1-\exp(-e_i))(1−exp(−ei)) 的非线性误差项,在误差趋近原点时,协同偏置指令平滑退化,加速度指令无缝过渡至纯比例导引。仿真数据显示,对于初始时间误差最大的 UAV 2(领先机),最优方法消耗了 11696 m2/s311696 \text{ m}^2/\text{s}^311696 m2/s3 的协同偏置能量,而本文方法大幅降低至 12332 m2/s312332 \text{ m}^2/\text{s}^312332 m2/s3。
最终,两种方法均达到了极高的时间同步精度(最大命中极差 0.0000s0.0000\text{s}0.0000s)。最优误差动力学的末端脱靶量约为 0.06m0.06\text{m}0.06m,而本文的预设时间方法在非线性平滑过渡的加持下,虽然脱靶量略增至 0.5m0.5\text{m}0.5m 左右,但依然完全满足工程打击精度要求,并在末端指令平滑性和能量优化上展现出了独特的优势。这充分验证了所提非线性预设时间协同制导律在满足物理约束前提下的高精度与强鲁棒性。
5. 结论
针对考虑导引头视场角约束的多无人机三维预设时间协同拦截问题,本文提出了一种非线性协同制导律。研究表明:
- 状态依赖的非线性"软墙"惩罚函数有效衔接了物理安全边界与协同控制指令,在不改变底层比例导引架构前提下,保证了飞行过程的视场角安全性。
- 引入时间分歧势函数规避了传统非对称矩阵放缩难题,在一般连通拓扑下严格证明了局部异构约束赋予系统的抗单点饱和鲁棒性。
- 所提方法实现了收敛时间的显式指定与控制参数的解耦,并在误差趋零末段呈现平滑退化特性,消除了高频指令抖振,具备良好的工程应用可行性。