本文将使用isaac sim 导入SO101 机械臂并使用ROS2进行控制和获取机械臂状态
在github上下载SO101机械臂,里面有其urdf文件
导入SO101机械臂
导入网格
file -> import
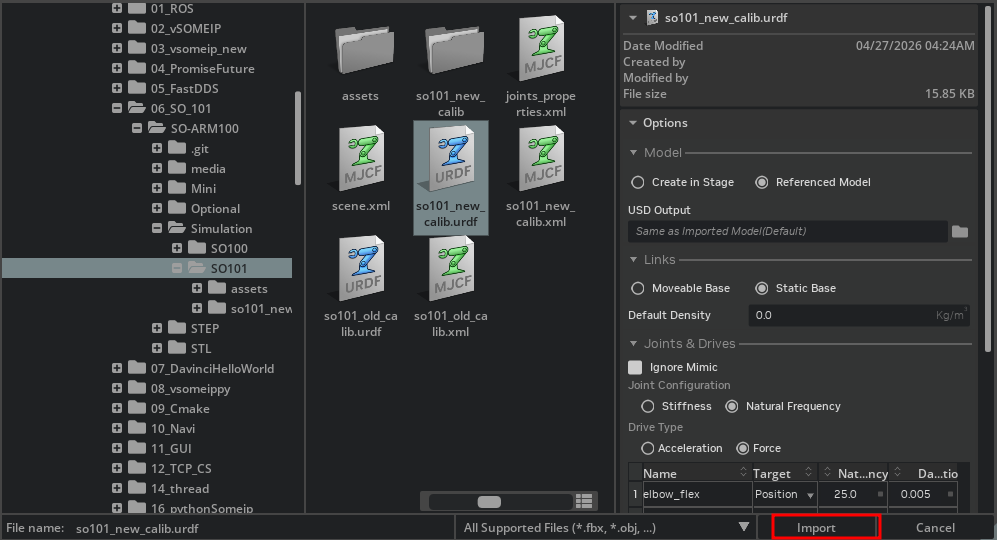
随后点yes
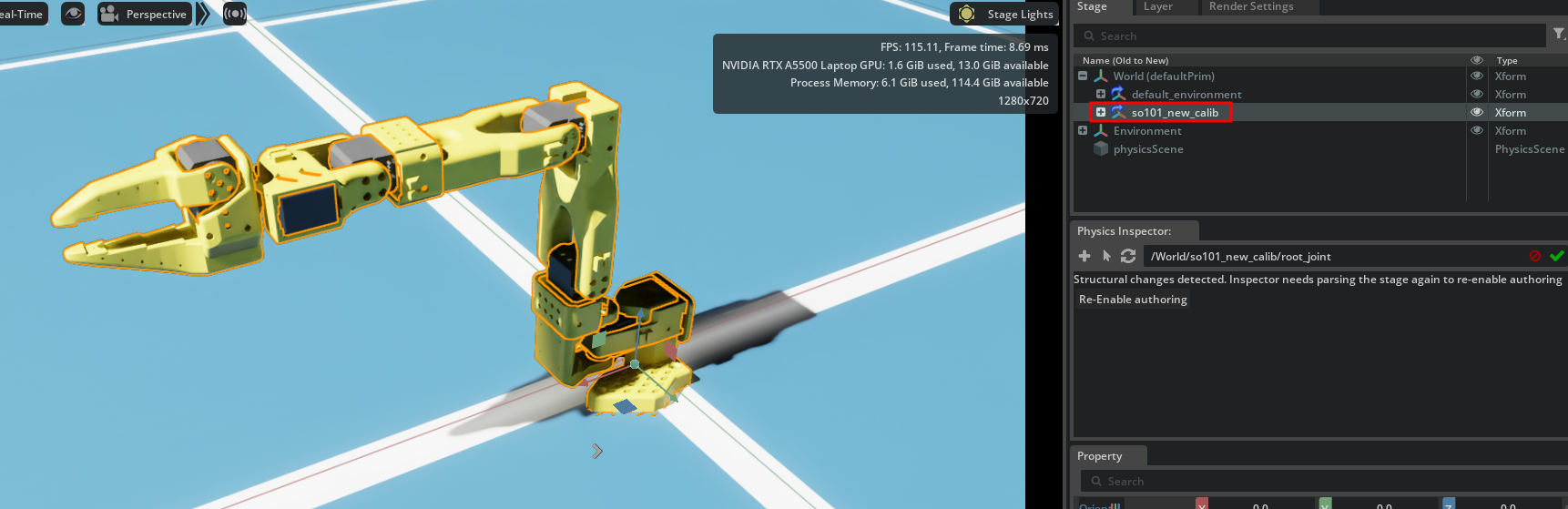
机械臂就load 进来了
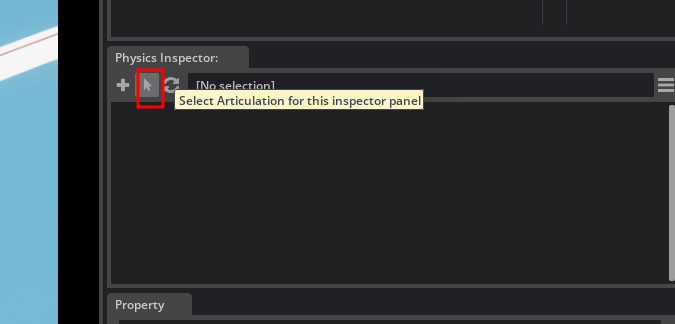
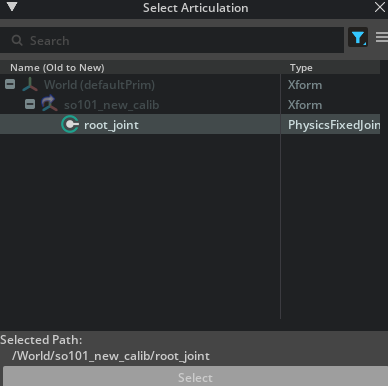
打开physical inspector 让其动起来
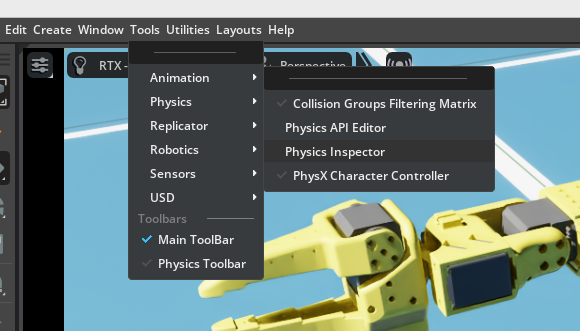
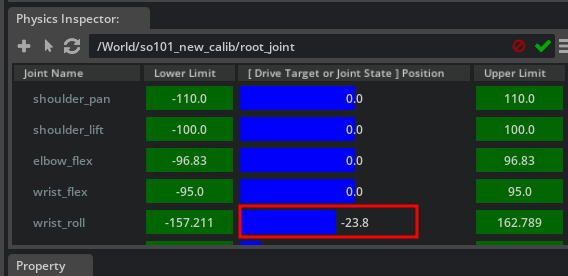
拖动蓝色bar就可以让机械臂动起来了
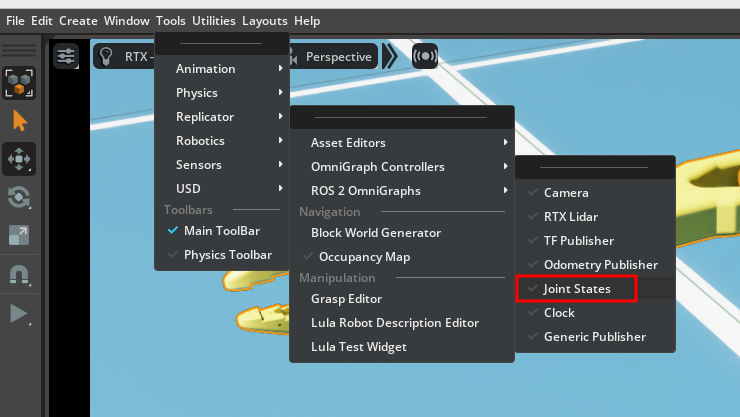
用ROS2控制机械臂
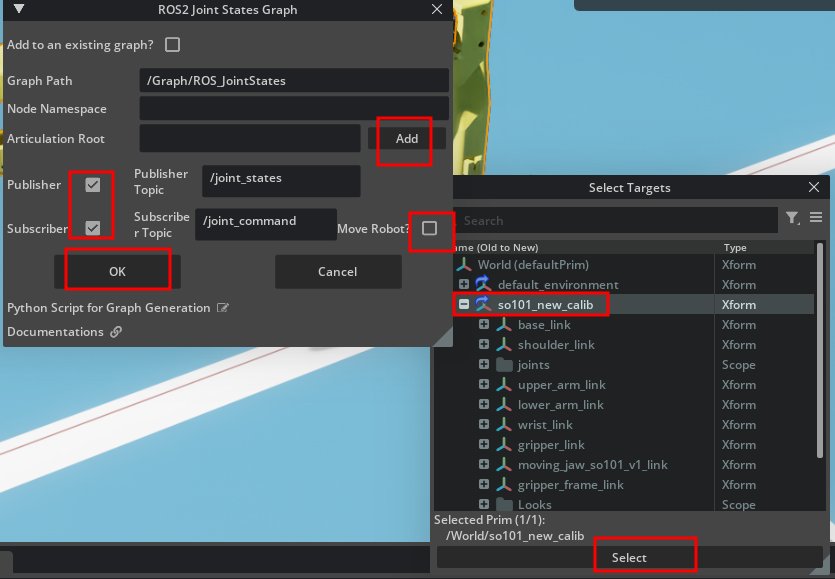
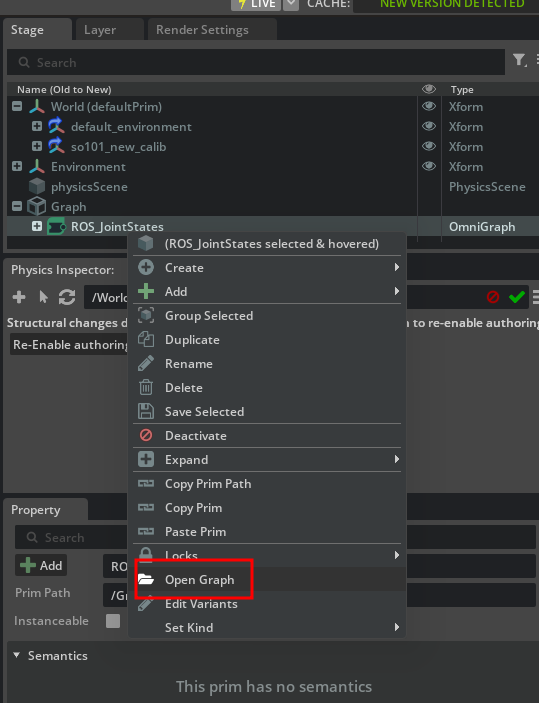
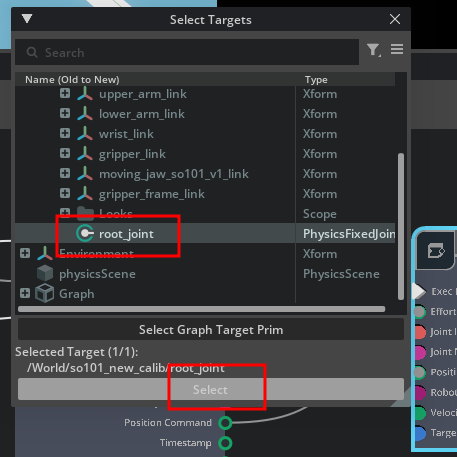
选择机械臂
在右边的就能看到其graph了
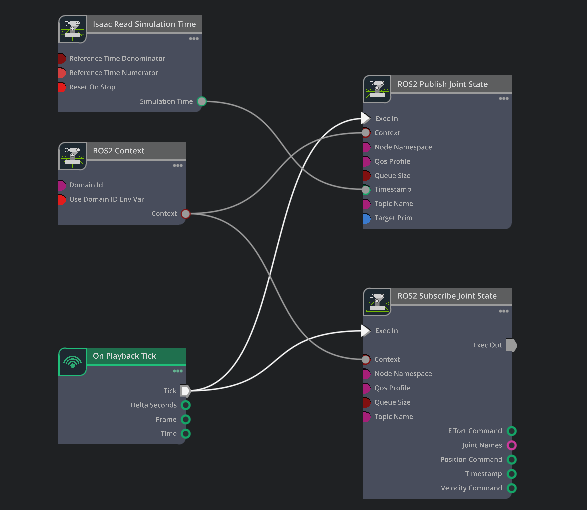
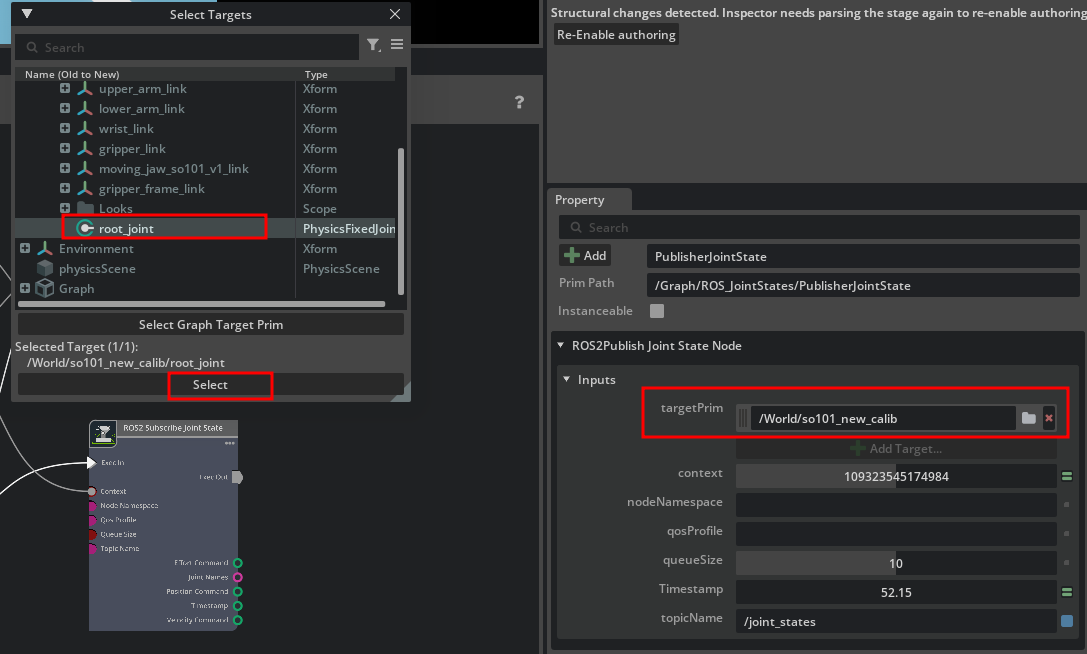
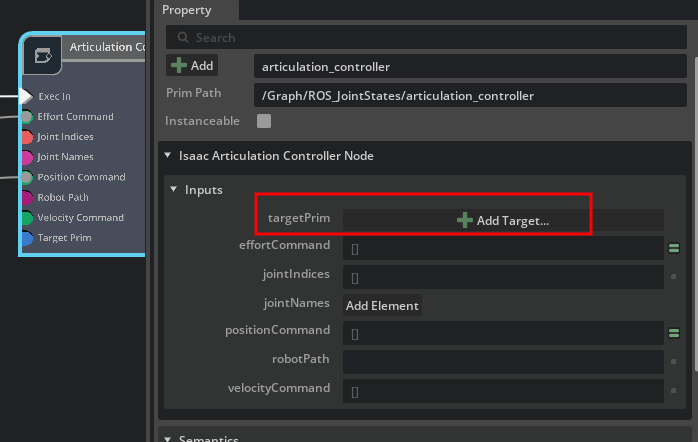
把articulation Controller加进来
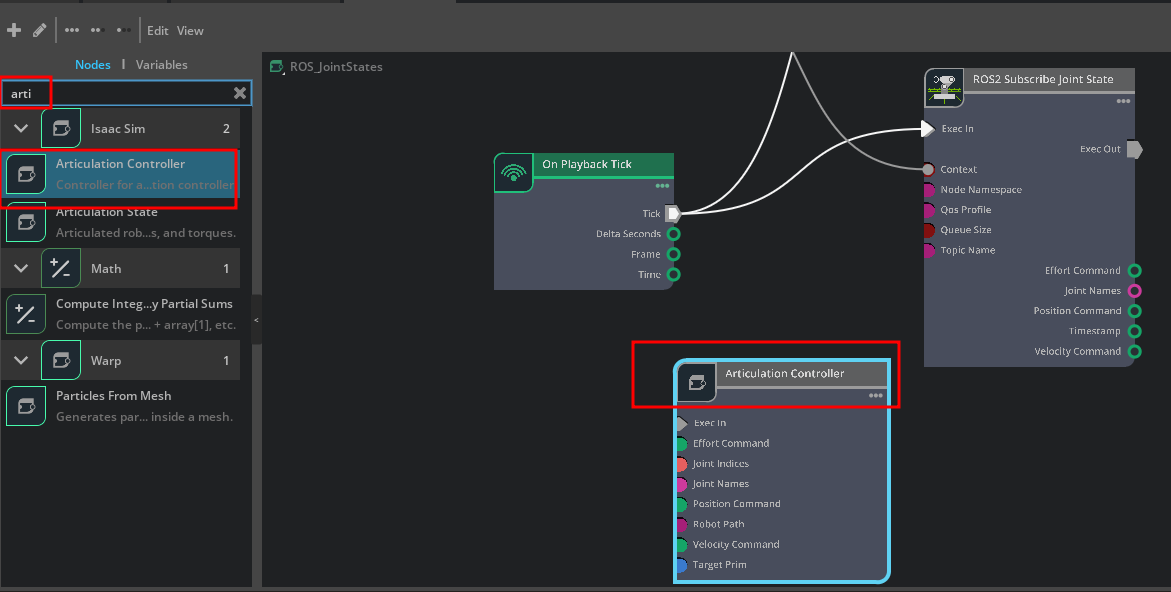
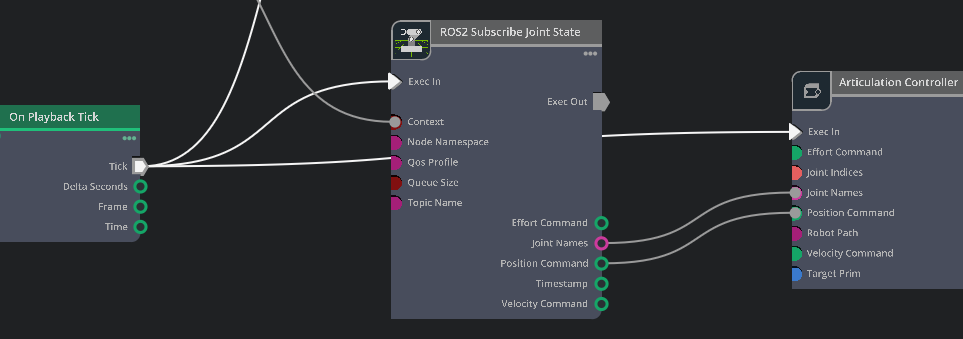
连接节点的各topic
在终端输入
ros2 topic list能看到两个话题
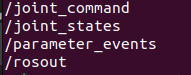
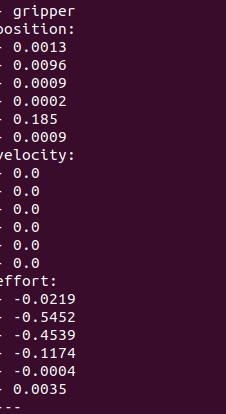
ros2 topic echo /joint_states能看到发布的消息,在isaacsim里拖动机械臂,可以看到joint states 消息在变化
同样也可以自己写一个publish节点,让isaac sim里面的机械臂动起来
用千问写了个publisher的代码:
提示词如下:
已知节点名称为/joint_command
节点接口的定义如下
std_msgs/Header header
builtin_interfaces/Time stamp
int32 sec
uint32 nanosec
string frame_id
string[] name
float64[] position
float64[] velocity
float64[] effort
要求:
分别用键盘上的数字控制各个joint:
1: shoulder_pan
2: shoulder_lift
3: elbow_flex
4: wrist_flex
5: wrist_roll
6: gripper
分别用键盘上的字母控制关节位置:
a: 减小
d: 增大
按键盘上的q键退出程序
这段代码使用控制Lerobot SO101机械臂,写代码时需要考虑这一块
以此写一段ROS2 的python代码,代码需要在python 3.11 上运行(需要在代码里明确,因为ubuntu22.04默认使用3.10)
python
#!/usr/bin/python3.11
# -*- coding: utf-8 -*-
"""
LeRobot SO-101 Keyboard Joint Controller for ROS 2
明确要求:需要在 Python 3.11 环境下运行
"""
import sys
import termios
import tty
import select
import threading
# 强制检查 Python 版本
if sys.version_info < (3, 10):
print(f"\033[91m[ERROR] This script requires Python 3.11+, but current version is {sys.version_info.major}.{sys.version_info.minor}\033[0m")
print("Please run with: python3.11 so101_keyboard_control.py")
sys.exit(1)
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import JointState
class SO101KeyboardControl(Node):
def __init__(self):
super().__init__('so101_keyboard_control')
# 1. 创建发布者,话题为 /joint_command
self.publisher = self.create_publisher(JointState, '/joint_command', 10)
# 2. 关节名称映射(数字键 -> 关节名)
self.key_to_joint = {
'1': 'shoulder_pan',
'2': 'shoulder_lift',
'3': 'elbow_flex',
'4': 'wrist_flex',
'5': 'wrist_roll',
'6': 'gripper'
}
# 3. SO-101 关节限位保护(单位:弧度 rad)
# 根据 SO-101 的物理结构,舵机通常在 -180° 到 180° 之间,这里设置安全范围
self.joint_limits = {
'shoulder_pan': (-3.14, 3.14),
'shoulder_lift': (-2.0, 2.0),
'elbow_flex': (-2.0, 2.0),
'wrist_flex': (-1.57, 1.57),
'wrist_roll': (-3.14, 3.14),
'gripper': (0.0, 1.0)
}
# 4. 初始化当前关节位置(单位:弧度 rad)
self.current_positions = {name: 0.0 for name in self.key_to_joint.values()}
# 步长设置(每次按键增加/减小的弧度值,约 2.8度)
self.step_size = 0.05
# 当前选中的关节
self.active_joint = None
self.running = True
# 5. 启动键盘监听线程
self.keyboard_thread = threading.Thread(target=self.keyboard_listener)
self.keyboard_thread.daemon = True
self.keyboard_thread.start()
# 6. 启动定时器,以 50Hz 的频率持续发布当前关节状态
self.timer = self.create_timer(0.02, self.publish_joint_state)
self.get_logger().info("\033[92mSO-101 Keyboard Controller Started.\033[0m")
self.get_logger().info("Press 1-6 to select joint, 'a' to decrease, 'd' to increase, 'q' to quit.")
def keyboard_listener(self):
"""非阻塞键盘监听线程"""
old_settings = termios.tcgetattr(sys.stdin)
try:
tty.setcbreak(sys.stdin.fileno())
while self.running:
ready, _, _ = select.select([sys.stdin], [], [], 0.1)
if ready:
key = sys.stdin.read(1)
self.process_key(key)
finally:
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, old_settings)
def process_key(self, key):
"""处理按键逻辑"""
if key == 'q':
self.get_logger().info("Exiting...")
self.running = False
rclpy.shutdown()
sys.exit(0)
elif key in self.key_to_joint:
self.active_joint = self.key_to_joint[key]
self.get_logger().info(f"\033[93mActive Joint: {self.active_joint}\033[0m")
elif key == 'a' and self.active_joint:
new_pos = self.current_positions[self.active_joint] - self.step_size
min_lim, max_lim = self.joint_limits[self.active_joint]
self.current_positions[self.active_joint] = max(min_lim, min(max_lim, new_pos))
elif key == 'd' and self.active_joint:
new_pos = self.current_positions[self.active_joint] + self.step_size
min_lim, max_lim = self.joint_limits[self.active_joint]
self.current_positions[self.active_joint] = max(min_lim, min(max_lim, new_pos))
def publish_joint_state(self):
"""构建并发布 JointState 消息"""
msg = JointState()
msg.header.stamp = self.get_clock().now().to_msg()
msg.header.frame_id = "base_link"
joint_names = list(self.key_to_joint.values())
msg.name = joint_names
msg.position = [self.current_positions[name] for name in joint_names]
msg.velocity = []
msg.effort = []
self.publisher.publish(msg)
def main(args=None):
rclpy.init(args=args)
node = SO101KeyboardControl()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()