Prism Path
科 研 快 报
计算机顶尖期刊论文资讯
-NO.2026015-
一种用于自适应运动和探索微小刚性/柔性管道 的尺蠖式微型机器人
A Caterpillar-Type Miniature Robot for Adaptive Locomotion and Exploration of Tiny Rigid/Soft Pipes
期刊:IEEE Transactions on Robotics(Q1/一区)
发布日期:2026年05月26日
DOI: 10.1109/TRO.2026.3697140(论文数据图表详见)
目录
[6-7月 EI会议分享:IC-IPPR 2026](#[6-7月] EI会议分享:IC-IPPR 2026)
直径80mm以下的管道探测需求广泛存在于航空发动机引气管(典型50mm)、核电站支线管(38-68mm)以及人体结肠(最小22mm)等场景。
然而,现有尺蠖式管道机器人的最小尺寸普遍在80mm以上,结肠用履带机器人等更小尺寸的样机,则缺乏主动变径能力与接触力感知功能------这两项恰好是安全、自主通过未知刚/软管道的核心前提。
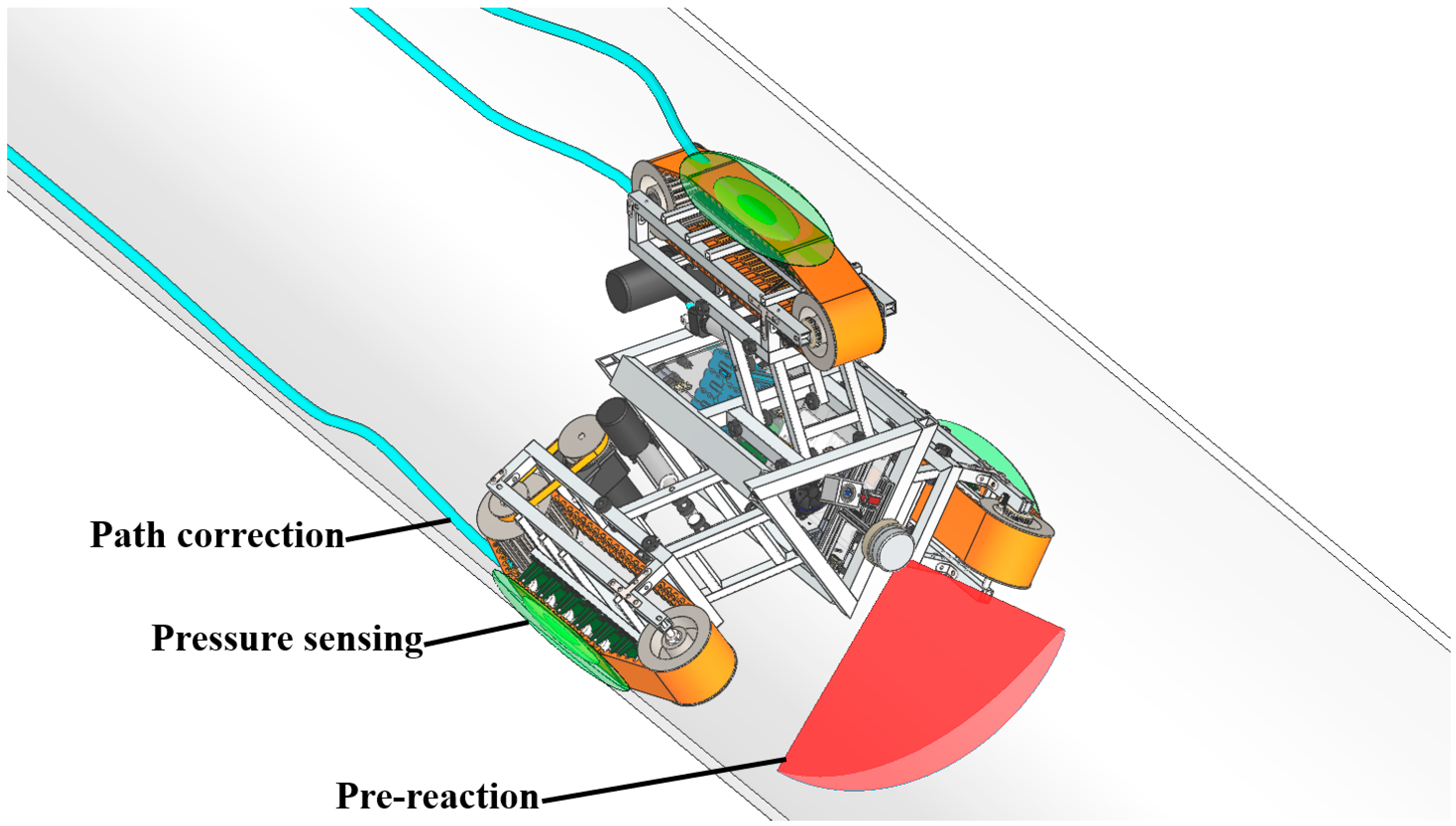
2026年《IEEE Transactions on Robotics》刊发的一项研究提出了VCMR(变径尺蠖微型机器人),其整机尺寸Φ34.6mm×41mm,变径范围34.6-89.6mm(变径比2.59),并集成了三组独立履带与薄膜压力传感器。
本文聚焦其机构创新与实验验证结果,探讨该方案的实际效能与剩余挑战。
(一)3项关键设计折中
**变径机构:单组四杆+折叠弹簧片。**传统方案需两组并联连杆保证稳定性,但微型化下空间不允许。本研究采用一组四杆机构,并在两侧安装折叠弹簧片(FSL),在变径过程中分别受压或受拉。弹簧片的调制作用使扩张力在直径小于76.77mm时增强(助扩),大于该值时减弱(限力),实现了更平缓的力-位移特性,同时省去了一组连杆,为内部驱动腾出空间。
 (DOI: 10.1109/TRO.2026.3697140)
(DOI: 10.1109/TRO.2026.3697140)
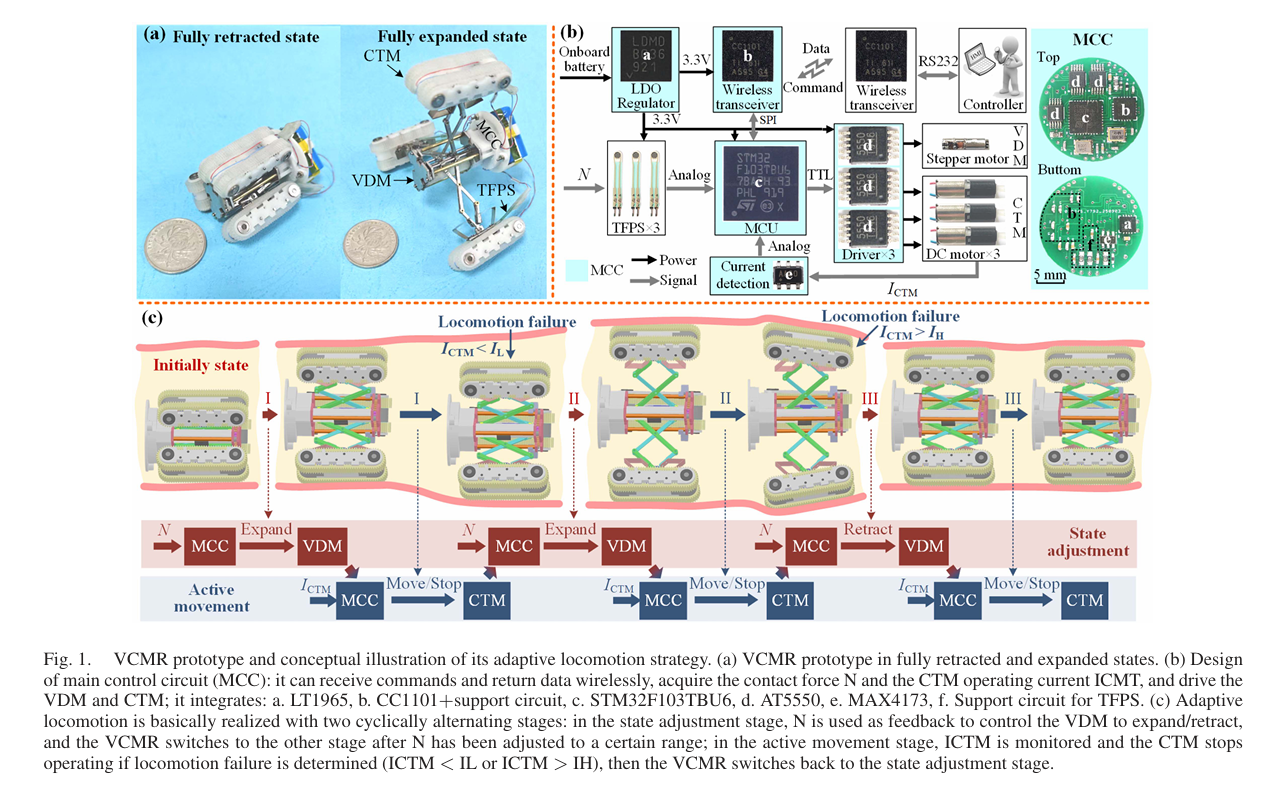
**履带模块:自研微型驱动链。**CTM高度仅9.5mm,关键在于摒弃了直径不小于20mm的商用带轮,改用直径5.7mm的自制齿轮直接驱动硅胶履带内齿,配合6mm行星电机,使得履带总成厚度远低于现有18mm的最低水平。
**力传感器:卡扣式无额外空间集成。**三枚厚度0.2mm的薄膜压力传感器(TFPS)通过卡扣结构嵌于CTM与VDM之间,感压面紧贴CTM底部凸台。但装后标定显示三传感器阈值(0.175-0.566N)和灵敏度差异明显,必须逐个校准,反映出微型集成下的一致性难题。
(二)自适应策略与表现
VCMR的控制逻辑为"状态调节-主动运动"两阶段循环:以接触力N(三传感器之和)为反馈控制VDM扩/缩,以CTM驱动电流(空载160mA,堵转350mA)判定运动失效。刚性管道中N目标区间设为峰值N_peak的75%-95%;软性管道则依据所需牵引力与摩擦系数预设区间,无法通过扩张获取N_peak。
(DOI: 10.1109/TRO.2026.3697140)
关键实验数据:
-
牵引力:等径管中实测牵引力与正压力线性吻合;变径倾角15°时牵引力降至等径管的约40%,倾角25°时理论趋零,实际验证未在更大倾角下进行。
-
负载能力:垂直60mm刚性管中可承载100g(2.68倍自重)上行,速度3.54cm/s;同直径软管中仅50g,速度1.45cm/s。水平刚性弯管(R=7.5cm)中可承载200g,弯段速度(4.18cm/s)较直段(4.51cm/s)下降甚微,得益于紧凑长度(41mm)与被动差速效应。
-
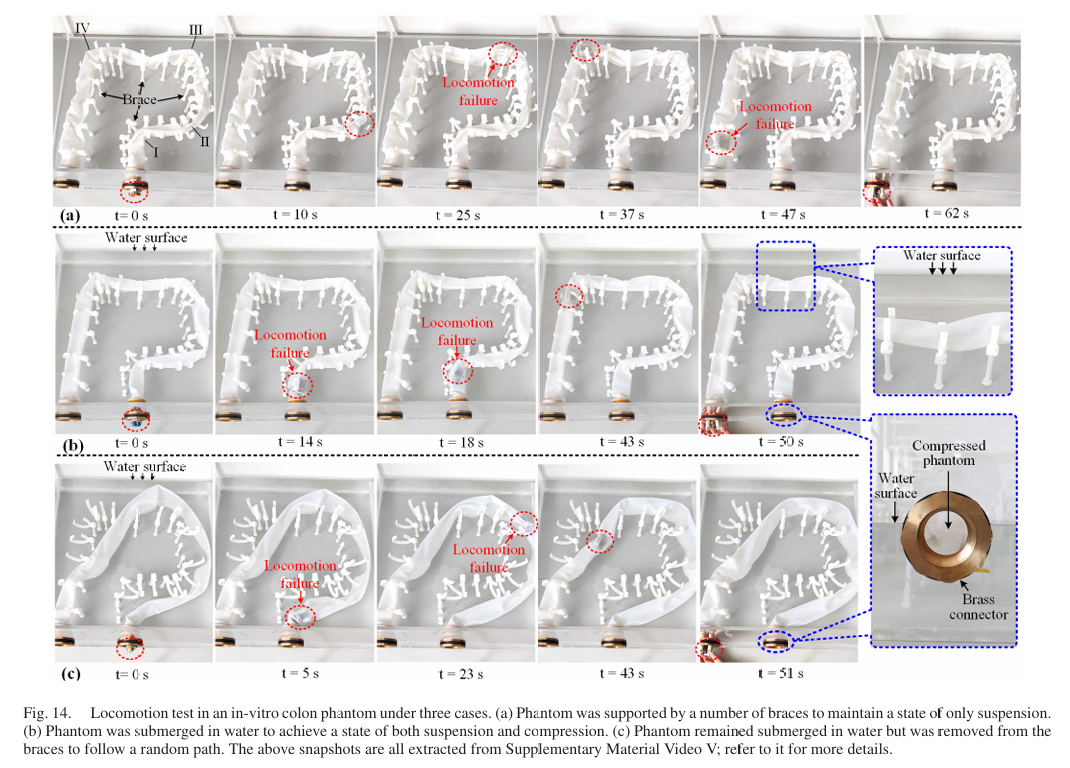
结肠体模(150cm,内径45±5mm,4处弯曲) :悬吊支撑时平均速度2.33±0.17cm/s;浸水模拟腹部压迫时3.07±0.48cm/s,但"软管被卷入"失效显著增加(每次处理5-13s)。该速度优于文献报道的多种无线结肠机器人。
(三)局限性讨论
VCMR的价值在于展示了如何在80mm以下尺度中,通过机构简化(四杆+弹簧片)、驱动链自研(微型齿轮传动)和传感器无空间集成(卡扣式)这三项折中,实现了主动变径、独立履带驱动与接触力感知的共存。
**但作者也坦承了三个方面的短板:**①单组四杆机构在直径大于60mm时刚度下降,软管中易侧翻;②传感器一致性差,标定工序不可避免;③5mm商用步进电机的扭矩有限,变径调节耗时较长。向上扩展可行,但进一步微型化已接近现售微电机的物理极限。

CVMR在结肠体模中的速度(约3cm/s)和刚性管中2.68倍自重的负载能力验证了基本可行性,但一致性问题、大直径软管稳定性及变径速度仍是后续改进重点。
6-7月 EI会议分享:IC-IPPR 2026
我们诚挚发起本次"2026年图像处理与模式识别国际会议 (IC-IPPR 2026)"的征稿,旨在汇聚全球顶尖学者、研发工程师与青年学子,共同搭建一个深度交流、碰撞思想、孕育合作的高端平台。

**【组织单位】**喀什大学、管理与技术大学(UMT)、新加坡机器人学会(RSS)
**【会议官网】**www.ic-ippr.org
**【会议出版】**所有论文将由会议委员会的2-3名专家评审员进行评审。经过仔细的审查过程,所有被接受的论文都将发表在SPIE-The International Society for Optical Engineering《会议论文集》上,并提交给EI Compendex和Scopus进行索引。
**【审稿流程】**投稿 (全英WORD+PDF) - 稿件收到确认 (1个工作日) - 初审 (3-5个工作日) - 告知结果 (接受/拒稿) - 终审(1-2个工作日)
**【官方邮箱】**ic-ippr@outlook.com