##################################################
此处来自立创开源机器人:https://oshwhub.com/gshaoburuchuan/project_oajuxfqg
本文只做深度解析,不作任何商业用途,详情请看以上链接,
#################################################
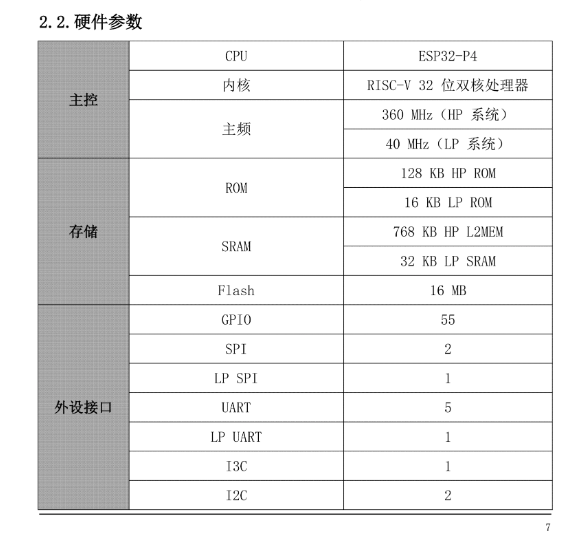
1.MCU
选用WT0132P4-A1核心板,核心板参数如下
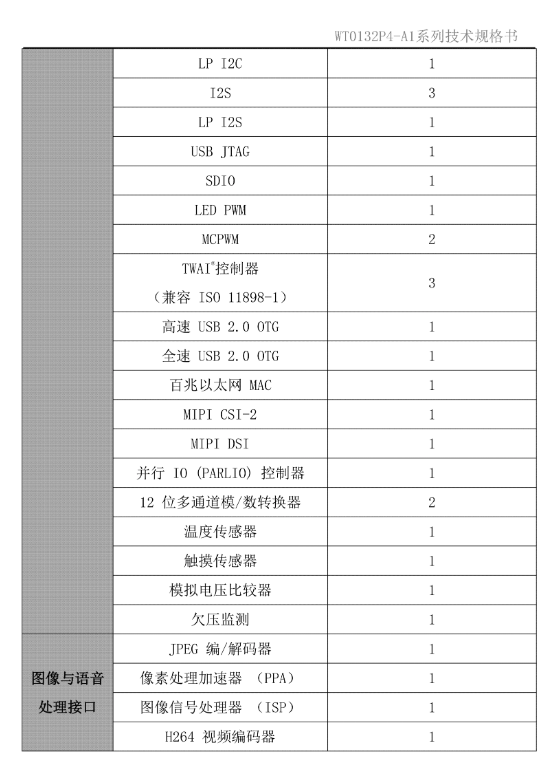
2.通信功能
①MIPI :MIPI DSI 和MIPI CSI
MIPI DSI (Display Serial Interface) - 显示接口
**作用:**它是处理器(如手机SoC)和显示模组(屏幕) 之间的通信桥梁,负责将图像数据高速传输到屏幕上。
主要特点 :高速与低功耗:专为移动设备优化,能在传输高清视频时保持低功耗。
**双向通信:**不仅可向屏幕发送图像数据,也能读取屏幕状态信息。
两种工作模式:
命令模式 (Command Mode) :屏幕自带显示缓存,主机通过发送命令和数据来控制显示内容。
视频模式 (Video Mode):屏幕无缓存,主机以"视频流"形式实时、不间断地传输像素数据。
MIPI CSI (Camera Serial Interface) - 摄像头接口
**作用:**它是处理器和图像传感器(摄像头) 之间的桥梁,负责将摄像头捕捉的图像数据传输给处理器进行处理。
主要特点:
版本迭代:目前最主流的标准是 CSI-2,此外还有针对更高性能需求的CSI-3等版本。
单向高速传输:主要负责将大量图像数据从摄像头高速传输到处理器。
灵活的配置接口:通常搭配一个 CCI (Camera Control Interface) 总线(基于I²C),用于处理器对摄像头模组进行配置和控制。
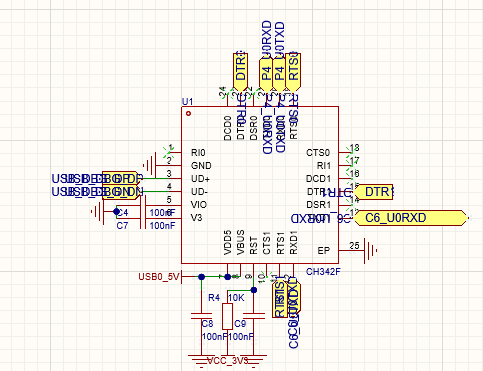
②USB
一共有三路USB,
2路USB是通过CH342F芯片实现,MCU的串口转USB
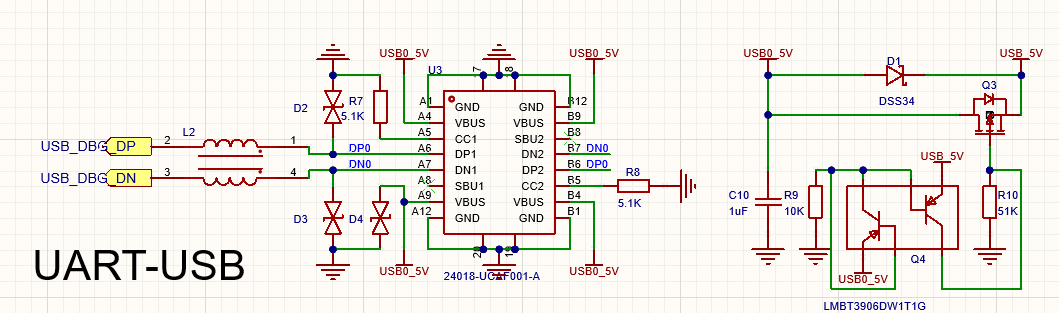
LMBT3906DW1T1G作用是:实现双路5V电源的自动切换(主备供电)。它会在主电源 USB0_5V 掉电时,自动无缝地将系统负载切换到备用电源 USB5_5V 上,同时严格防止两路电源相互倒灌。
1路USB是直接从MCU出来。
3.电源
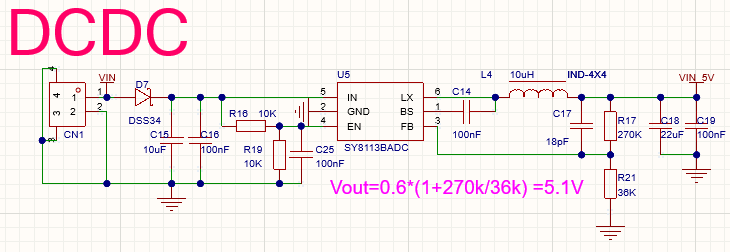
最大电流3A
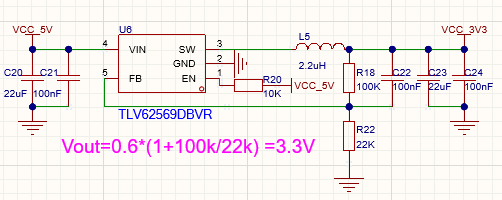
TLV62569DBVR最大电流输出2A
4.其他接口