0. 先看效果
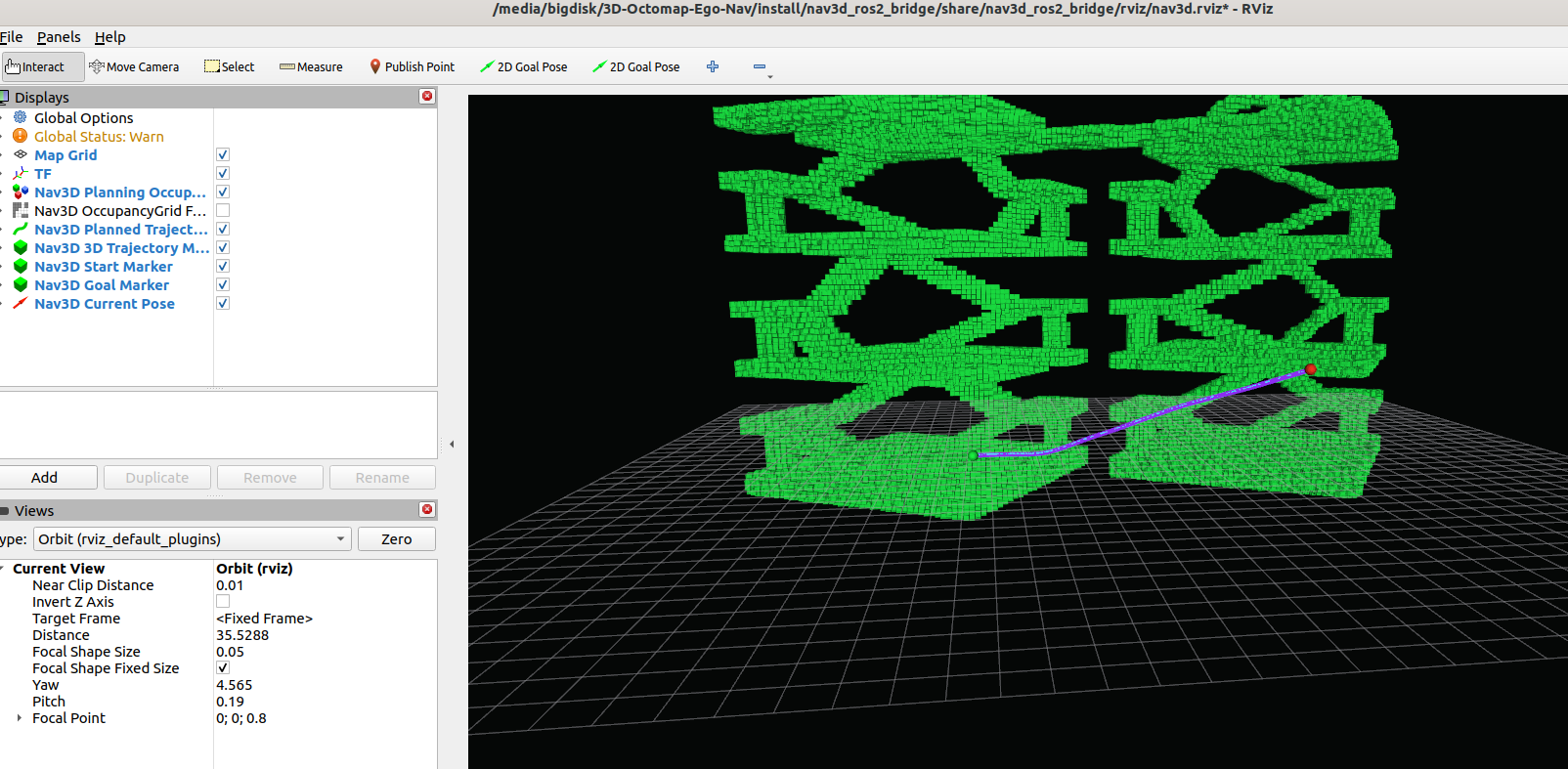
三种规划模式跑起来之后,RViz 里大概是这样的。绿色体素层就是规划实际使用的碰撞图,蓝线是 A* 搜索产出的 warm start 路径,紫红色曲线是 B-spline 优化后的最终轨迹。不同模式下轨迹的行为完全不同------UAV 可以在空中任意穿行,Ground 必须贴着地面支撑走,2D 则是把三维信息投影到平面上做规划。
0.1 3D UAV 自由空间规划
无人机模式不需要地面支撑,只要采样点在地图边界内、不落入 occupied 体素、满足膨胀半径,就可以视为可通行。这是最自由的规划模式,轨迹可以上下穿越楼层间的空隙,只要那片空间确实是 free 的。
0.2 3D Ground 有地面支撑
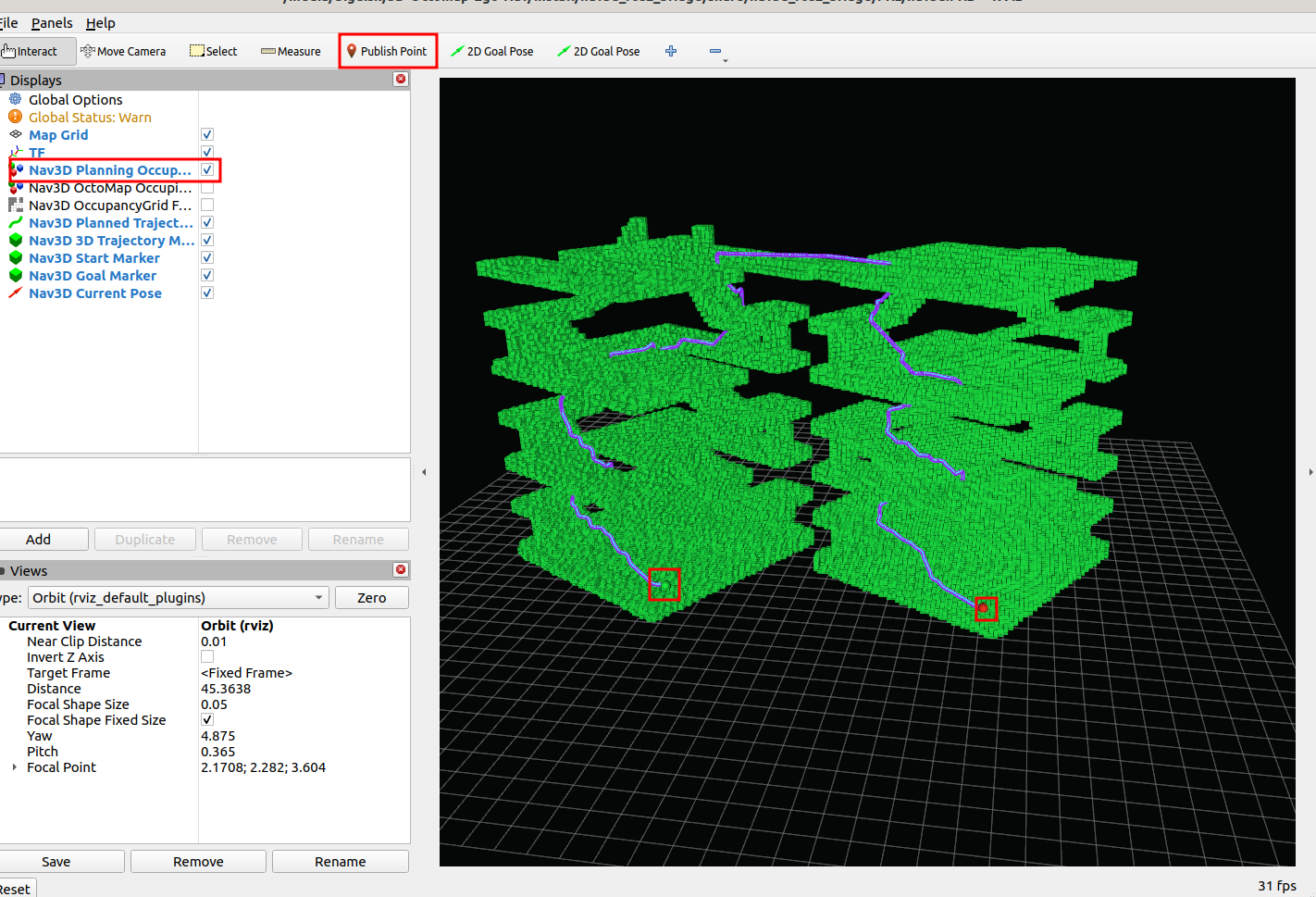
地面机器人虽然运行在 3D 体素地图里,但不能把空中的 free space 当作道路。每个采样点都必须找到可支撑的地面结构,否则轨迹可能漂在空中,或者贴着楼梯边沿走出不可执行的路径。这个约束让搜索空间大幅缩小,但也意味着连通性更容易断裂。
0.3 2D Ground OccupancyGrid
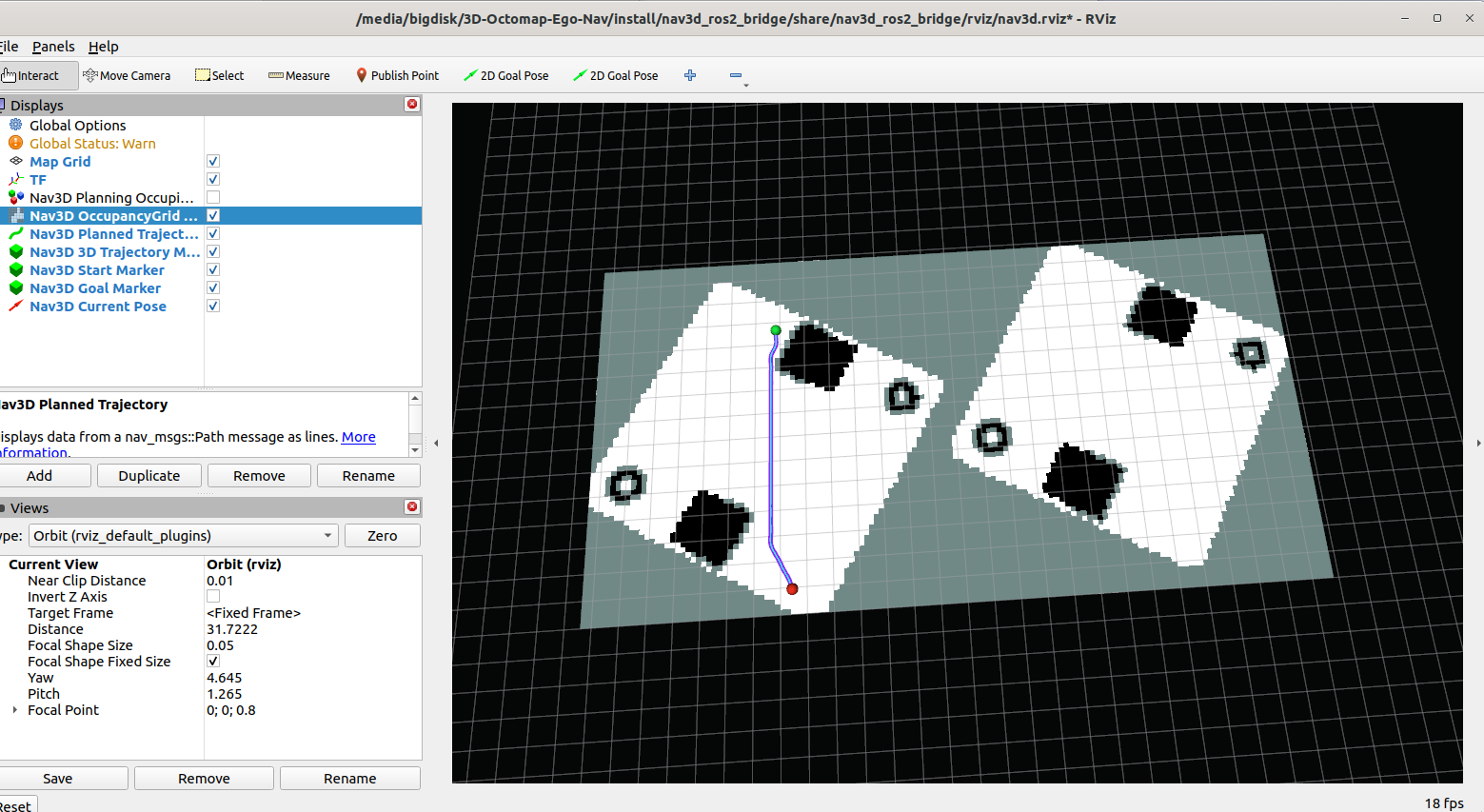
2D ground 模式把 OctoMap 投影成 OccupancyGrid。只有 ground-supported 且有 clearance 的格子被标为 free,其他区域是 unknown 或 occupied。这里的关键是,2D 并不等于把地图外接矩形全部当作可走平面------它只是把「地面可通行」这个三维判断压到 XY 上。
0.4 单测全绿
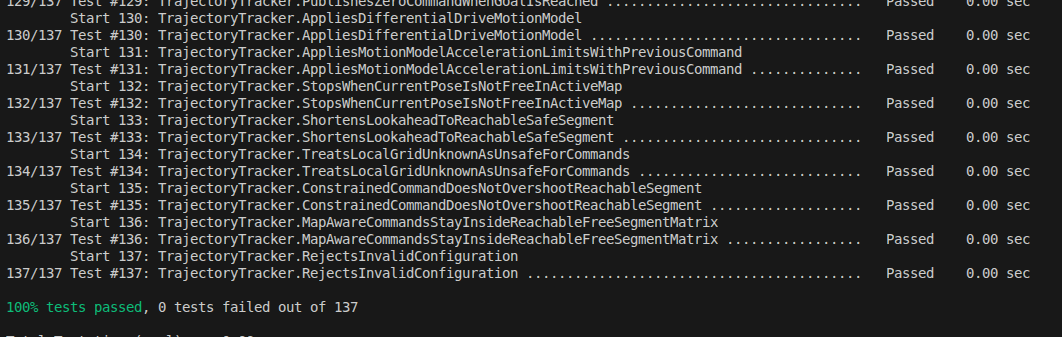
Core 层所有单测通过,覆盖体素化、A* 搜索、B-spline 优化、碰撞检测、safety monitor 等核心模块。这是确认规划链路每一步都正确工作的基础验证手段。
1. 为什么要做这个
1.1 论文到工程的距离
EGO-Planner 是一篇很漂亮的论文,但论文实现和能跑在自己地图上的工程之间,有一段很长的路。核心问题在于,论文关注的是算法正确性和对比实验,而工程需要的是可测试、可调试、可接入下游的完整链路。我想搞清楚这段路上每一步到底在做什么------不是读懂代码,而是亲手把它组起来、跑起来、测起来。
1.2 具体目标
所以这个项目的目标很具体:输入是一份 PCD 点云文件,输出是 RViz 或 Web 里可以看到的平滑轨迹,中间的每一步(体素化、A* 搜索、B-spline 优化、局部避障、safety replan)都要有对应的测试和可观察的中间状态。规划核心做成 ROS-free C++,再用 ROS2 bridge 和 Web UI 包住它,这样验证链路足够短,不需要整套 ROS 环境也能先跑通核心。
2. 整体链路
2.1 从点云到轨迹的六步
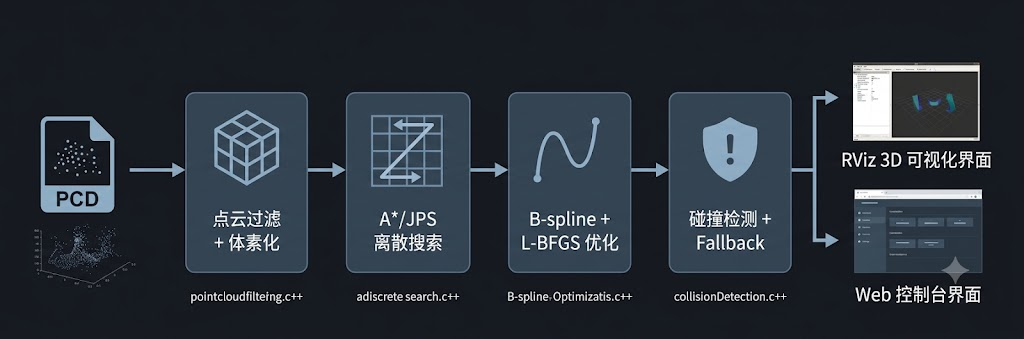
把整条规划链路拆开来看,每一步的输入输出都很明确。PCD 点云先经过过滤和体素化变成可查询的地图结构,然后 A* 或 JPS 在离散网格上搜出一条拓扑可行路径作为 warm start,B-spline 优化器用 L-BFGS 把控制点推到可通行空间里去,最后由碰撞检测和 fallback FSM 兜底。整条链路的设计原则是:每个阶段的职责清晰,可以单独测试和调试。
text
PCD 点云
→ 点云过滤 + Voxel/OctoMap 构建
→ 2D/3D A*(或 JPS)离散搜索 ← warm start 来源
→ B-spline 控制点初始化
→ L-BFGS 优化(平滑 + 避障代价)
→ 局部 A* rebound cue ← 替代 ESDF 梯度
→ 二次轨迹碰撞采样检查
→ fallback FSM(缩短目标 / 急停)
→ ROS2 bridge → RViz / Web2.2 关键实现文件
每一步都有对应的代码模块。bspline_optimizer.cpp 承接 warm start 和 L-BFGS 优化,包括 rebound cue 的生成逻辑;ego_planner_core.cpp 串联整条链路并执行 fallback FSM;safety_monitor.cpp 负责沿轨迹前向碰撞预警和急停决策。换句话说,Web、RViz、ROS topic 都不是规划本体,真正决定轨迹质量的是 core 里的地图语义、搜索结果、优化代价和碰撞复查。
3. ESDF 去哪了?
3.1 原版方案的代价
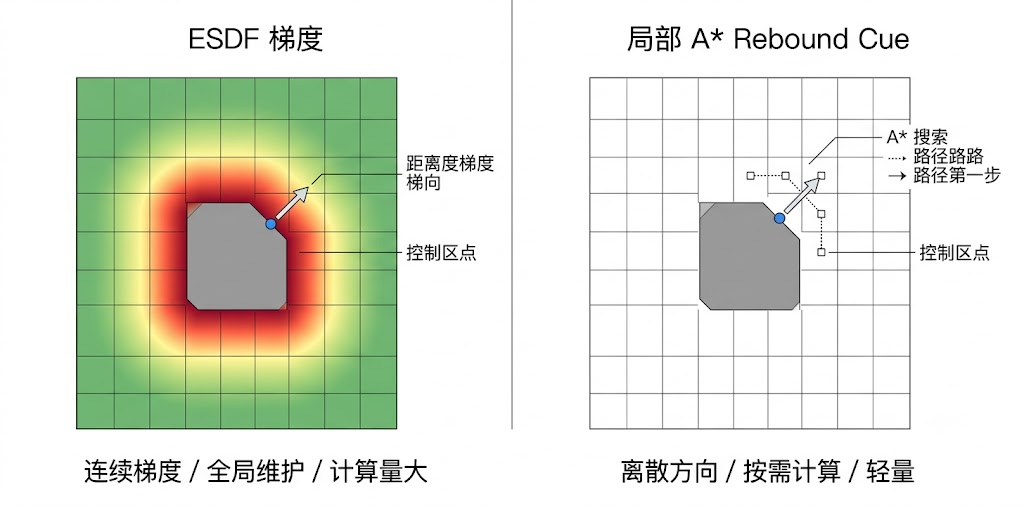
EGO-Planner 原版用 ESDF(欧式符号距离场)给 B-spline 优化提供避障梯度。ESDF 的好处是梯度信息连续、方向准确,但有实际工程代价:需要维护一张全局距离场,每次地图更新都要重算一遍距离传播,内存占用和计算量都不小。尤其是在点云更新频繁、局部障碍不断进入视野的动态场景下,ESDF 既要更新距离场,又要提供稳定梯度,这两个需求本身就有张力。
3.2 局部 A* rebound cue
我换了一种更直接的方式。在 B-spline 优化的内层循环中,L-BFGS 检测到某个控制点位于 occupied 区域或 clearance 不足时,从该控制点向最近 free 体素跑一次小范围 3D A* 搜索,把这条局部逃离路径的方向作为 rebound cue 注入代价函数。L-BFGS 继续优化,直到控制点回到可通行空间。实现在 bspline_optimizer.cpp:335 的 buildReboundCues():
cpp
// core/planner_core/src/bspline/bspline_optimizer.cpp:335
// buildReboundCues():局部 A* 替代 ESDF 梯度
//
// 1. 遍历所有控制点,检测 occupied 或 clearance 不足
// 2. 对碰撞控制点启动小范围 3D A*(搜索半径受限)
// 3. A* 路径第一段方向 → rebound direction
// 4. 注入 L-BFGS 代价函数作为软约束
cpp
// core/planner_core/src/bspline/bspline_optimizer.cpp:404
// lbfgsDirection():L-BFGS two-loop recursion
// 用 rebound cue + 平滑代价 + 碰撞代价的复合梯度驱动优化方向
// core/planner_core/src/bspline/bspline_optimizer.cpp:439
// makeWarmStart():A* 搜索结果 → B-spline 控制点初始化3.3 工程取舍的直觉
直观理解是,ESDF 梯度告诉你「几何上该往哪里推」,局部 A* cue 告诉你「从当前地图看,往哪里逃是通的」。在建筑、楼梯、狭窄走廊这类离散结构明显的地图里,后者更容易和搜索结果保持一致。代价是梯度信息不再连续------每次 rebound cue 是一次离散的局部重搜索,对高频动态障碍场景的梯度平滑性有所牺牲。
3.4 二次碰撞检查兜底
优化结束后,collision::TrajectoryChecker(ego_planner_core.cpp:300)会再做一次连续采样碰撞检查。如果曲线在控制点之间翻过薄障碍,这一步会拦下来,而不是只相信优化器的最终状态。检查仍失败的话,fallback FSM 依次尝试:保守 path-following → 提高 collision_weight → 缩短目标 → EmergencyStop。
4. A* + B样条 + L-BFGS,为什么不直接上 MPC
4.1 各阶段职责解耦
这也是我纠结过的问题。最终选择这套组合的原因是各阶段职责清晰、可以分开调试。A* 给出拓扑上可行的路径,作为 B-spline 的 warm start,解决的是「从哪里走」的问题;L-BFGS 在光滑代价函数上收敛快,解决的是「怎么走得平滑」的问题;B-spline 的均匀节点向量天然保证 C² 连续,解决的是「轨迹能不能被下游跟踪器执行」的问题。三步串起来,每一步出了问题都能单独定位。