文章目录
-
- 每日一句正能量
- 一、前言:为什么WS2812B是"时序地狱"
- 二、NRZ协议时序深度解析
-
- [2.1 单线归零码原理](#2.1 单线归零码原理)
- [2.2 数据格式](#2.2 数据格式)
- [2.3 为什么GPIO模拟不可靠](#2.3 为什么GPIO模拟不可靠)
- 三、SPI模拟NRZ:用硬件时钟替代软件延时
-
- [3.1 核心思想](#3.1 核心思想)
- [3.2 字节编码](#3.2 字节编码)
- 四、三种驱动方案对比
-
- [4.1 方案A:GPIO Bit-bang(软件模拟)](#4.1 方案A:GPIO Bit-bang(软件模拟))
- [4.2 方案B:SPI轮询(硬件时钟)](#4.2 方案B:SPI轮询(硬件时钟))
- [4.3 方案C:SPI+DMA(硬件自主)★](#4.3 方案C:SPI+DMA(硬件自主)★)
- 五、生产级驱动代码(SPI+DMA)
-
- [5.1 头文件 `ws2812b_driver.h`](#5.1 头文件
ws2812b_driver.h) - [5.2 核心实现 `ws2812b_driver.c`](#5.2 核心实现
ws2812b_driver.c) - [5.3 使用示例 `main.c`](#5.3 使用示例
main.c)
- [5.1 头文件 `ws2812b_driver.h`](#5.1 头文件
- [六、STM32F1 → F4 迁移要点](#六、STM32F1 → F4 迁移要点)
-
- [6.1 SPI时钟差异](#6.1 SPI时钟差异)
- [6.2 GPIO复用配置](#6.2 GPIO复用配置)
- [6.3 DMA通道映射](#6.3 DMA通道映射)
- 七、硬件设计要点
-
- [7.1 电平转换](#7.1 电平转换)
- [7.2 电源设计](#7.2 电源设计)
- [7.3 信号完整性](#7.3 信号完整性)
- 八、完整驱动状态机
- 九、调试技巧与常见问题
-
- [9.1 示波器验证](#9.1 示波器验证)
- [9.2 常见问题排查](#9.2 常见问题排查)
- 十、总结
每日一句正能量
能看见自己是清醒,能看见他人是善良。
清醒是对真相的承受力,善良是对他者的悲悯力。两者缺一,都不构成完整的人格成熟。
一、前言:为什么WS2812B是"时序地狱"
WS2812B是嵌入式领域最经典的可寻址RGB LED,单线控制、级联无限、独立调色------这些特性让它成为氛围灯、矩阵屏、可穿戴设备的首选。然而,其单线归零码(NRZ)协议对时序的要求极为苛刻:高电平持续时间的误差必须控制在±150ns以内,否则灯珠会误解析数据,导致颜色错位、闪烁甚至全灭。
从STM32F1(72MHz)迁移到F4(168MHz)时,GPIO翻转速度变化、SPI时钟树差异、DMA通道映射不同,都会直接影响驱动的稳定性。更糟糕的是,GPIO软件模拟方案虽然简单,但在RTOS环境下几乎无法使用------中断延迟会导致时序漂移,而关闭中断又会让系统瘫痪。
本文将深入剖析WS2812B的NRZ协议时序,对比三种驱动方案(GPIO模拟、SPI轮询、SPI+DMA),并给出基于SPI+DMA的生产级驱动代码,实现零CPU干预的硬件自主传输。
二、NRZ协议时序深度解析
2.1 单线归零码原理
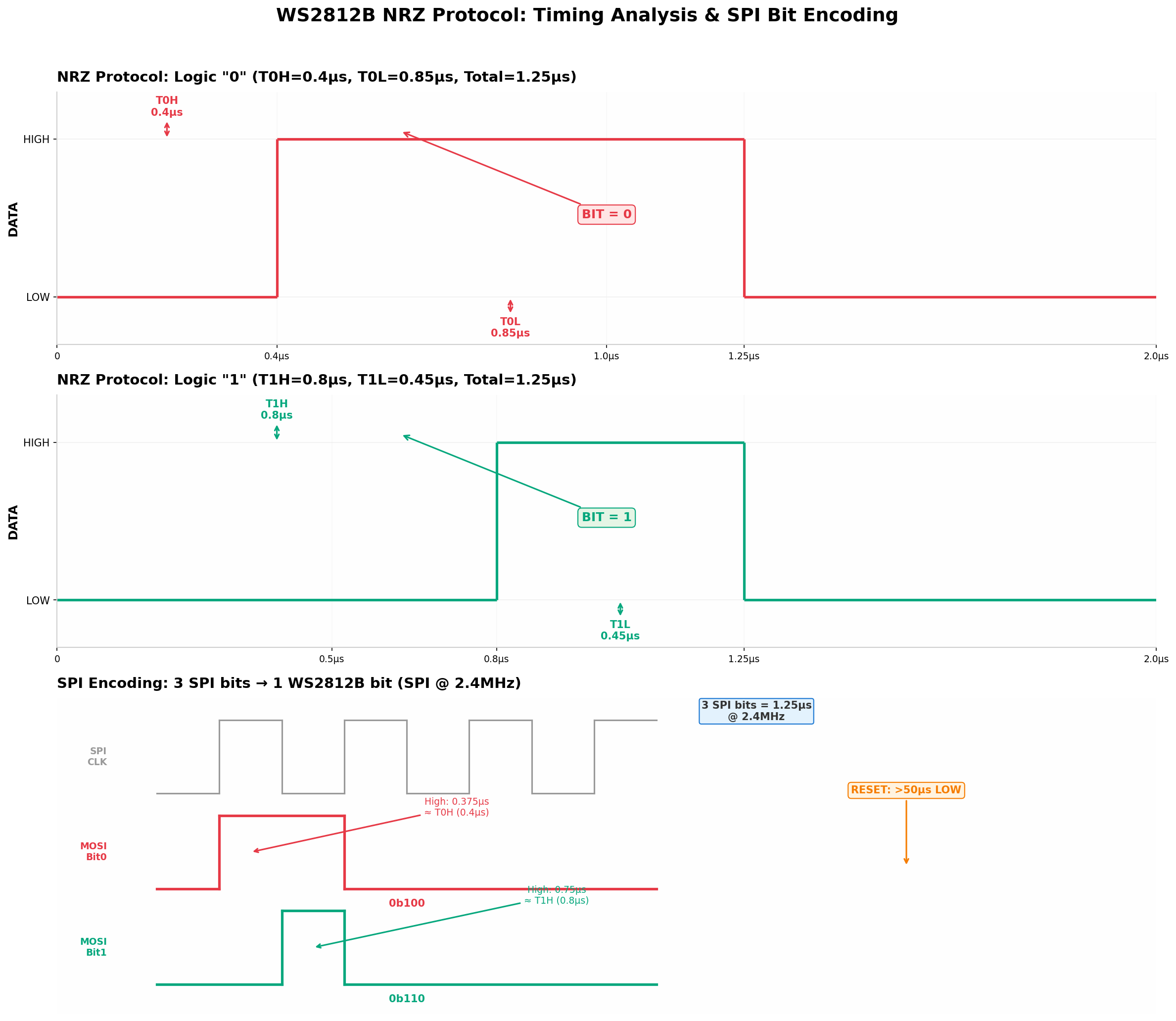
WS2812B没有独立的时钟线,数据通过高低电平持续时间编码:
| 码值 | 高电平时间 | 低电平时间 | 总周期 |
|---|---|---|---|
| 逻辑0 | T0H = 0.35~0.45μs | T0L = 0.75~0.95μs | ~1.25μs |
| 逻辑1 | T1H = 0.65~0.95μs | T1L = 0.30~0.45μs | ~1.25μs |
| 复位 | 低电平 > 50μs | --- | --- |
关键约束:高电平持续时间决定比特值,低电平时间只需保证总周期在1.25μs左右。±150ns的容差意味着,如果T0H实际为0.5μs(超出0.45μs上限),灯珠可能将其误判为逻辑1。
2.2 数据格式
每个灯珠需要24位GRB数据(注意是GRB顺序,不是RGB!):
- G7-G0:绿色8位(MSB先发)
- R7-R0:红色8位
- B7-B0:蓝色8位
数据在灯珠间级联传递:第一个灯珠截取前24位,将剩余数据通过DOUT转发给下一个灯珠。因此,100颗灯珠需要发送2400位(300字节)的连续数据流。
2.3 为什么GPIO模拟不可靠
c
/* 典型的GPIO模拟代码(不推荐) */
void WS2812B_SendBit(uint8_t bit) {
if (bit) {
GPIOA->BSRR = GPIO_PIN_0; // 拉高
__NOP(); __NOP(); __NOP(); // 延时 ~0.7μs
GPIOA->BRR = GPIO_PIN_0; // 拉低
__NOP(); __NOP(); // 延时 ~0.4μs
} else {
GPIOA->BSRR = GPIO_PIN_0;
__NOP(); // 延时 ~0.35μs
GPIOA->BRR = GPIO_PIN_0;
__NOP(); __NOP(); __NOP(); __NOP(); // 延时 ~0.8μs
}
}致命缺陷:
__NOP()的精确度受编译器优化、指令缓存、中断抢占影响- F1和F4的时钟频率不同,NOP数量需重新计算
- 关闭中断会导致RTOS调度器饿死
- 超过20颗灯珠后,累积误差导致颜色错位
三、SPI模拟NRZ:用硬件时钟替代软件延时
3.1 核心思想
SPI外设以固定时钟频率发送数据,每个SPI位的时间是硬件级精确的。如果用多个SPI位组合成WS2812B的一个NRZ位,就能完全消除软件延时的不确定性。
编码策略(3 SPI位 → 1 WS2812B位):
| WS2812B位 | SPI发送数据 | 高电平时间 | 低电平时间 |
|---|---|---|---|
| 0 | 0b100 |
1 bit = 0.417μs | 2 bits = 0.833μs |
| 1 | 0b110 |
2 bits = 0.833μs | 1 bit = 0.417μs |
SPI时钟频率计算:
- 3 SPI位 = 1 WS2812B位 = 1.25μs
- SPI频率 = 3 / 1.25μs = 2.4 MHz
关键发现:F1的APB2=72MHz,SPI1分频32得到2.25MHz(接近2.4MHz);F4的APB2=84MHz,分频32得到2.625MHz(略快)。两者都在WS2812B的容差范围内。
3.2 字节编码
每个WS2812B位需要3个SPI位,因此:
- 1字节(8 SPI位)= 2个WS2812B位 + 2个填充位
- 实际编码时,将3个WS2812B位打包到1字节(浪费2位),或更紧凑地编码
推荐编码方式(3位编码,MSB对齐):
c
/* 3位编码表 */
#define WS2812B_0_CODE 0b100 /* 0.417μs高 + 0.833μs低 */
#define WS2812B_1_CODE 0b110 /* 0.833μs高 + 0.417μs低 */
/* 将1字节GRB数据编码为3字节SPI数据 */
void WS2812B_EncodeByte(uint8_t grb_byte, uint8_t* spi_buf) {
uint8_t spi_byte = 0;
uint8_t bit_pos = 0; /* 当前SPI字节中的位位置(0-7)*/
for (int i = 7; i >= 0; i--) { /* MSB先发 */
uint8_t bit = (grb_byte >> i) & 0x01;
uint8_t code = bit ? WS2812B_1_CODE : WS2812B_0_CODE;
/* 将3位编码写入SPI字节 */
spi_byte |= (code << (5 - bit_pos)); /* 从高位开始填充 */
bit_pos += 3;
/* 如果当前字节填满,存入缓冲区 */
if (bit_pos >= 6) { /* 2个WS2812B位 = 6 SPI位,剩余2位 */
*spi_buf++ = spi_byte;
spi_byte = 0;
bit_pos = 0;
}
}
}优化:上述编码方式每字节浪费2位。更高效的方案是用24位SPI数据编码8个WS2812B位(24/8=3,无浪费),但实现更复杂。对于100颗灯珠,900字节的DMA缓冲区在大多数STM32上完全可接受。
四、三种驱动方案对比
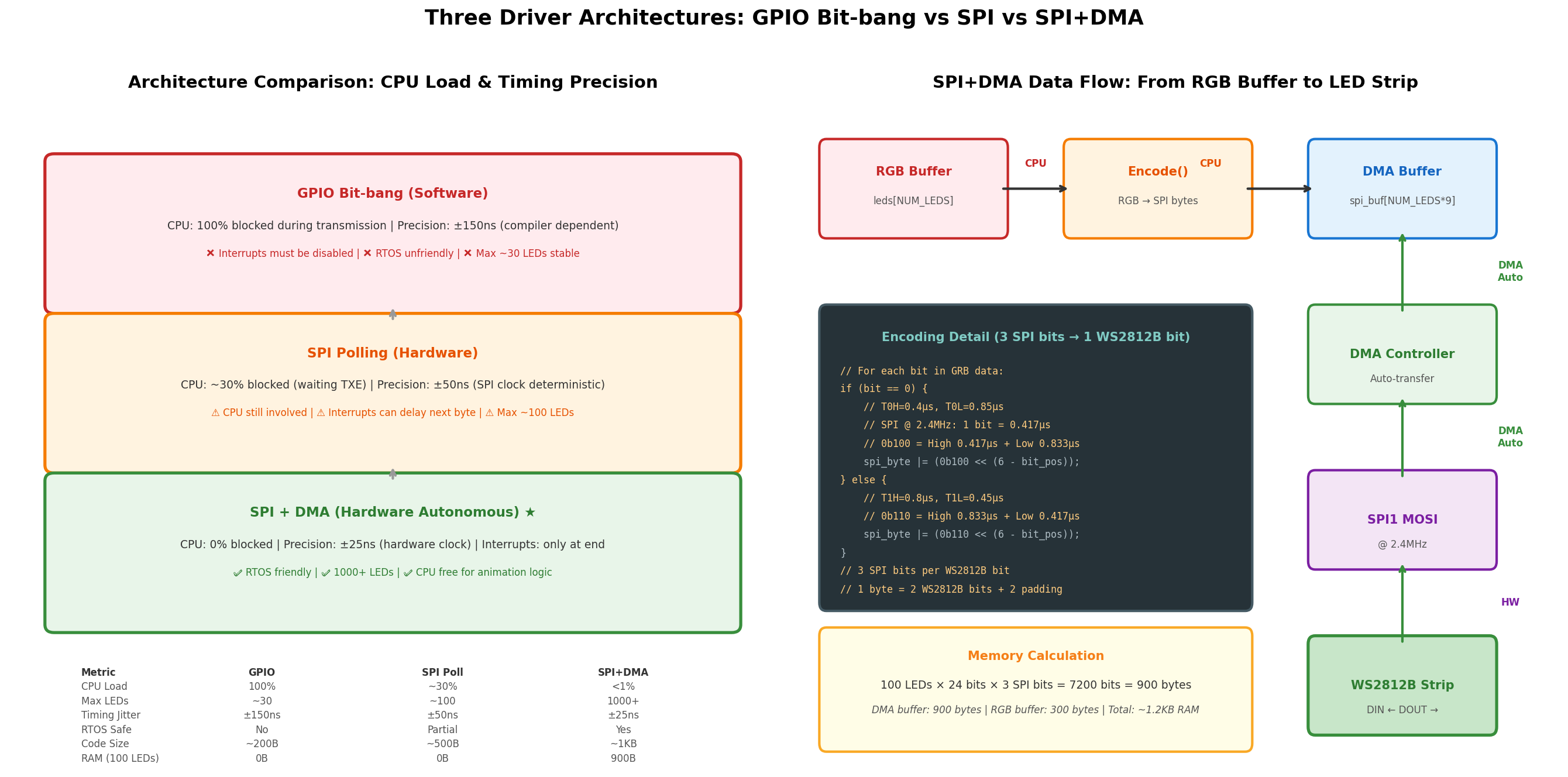
4.1 方案A:GPIO Bit-bang(软件模拟)
- CPU负载:100%(传输期间完全阻塞)
- 时序精度:±150ns(编译器优化依赖)
- 最大LED数:~30颗(累积误差)
- RTOS兼容性:❌ 必须关闭中断
4.2 方案B:SPI轮询(硬件时钟)
- CPU负载:~30%(等待TXE标志)
- 时序精度:±50ns(SPI时钟确定性)
- 最大LED数:~100颗
- RTOS兼容性:⚠️ 中断可能延迟下一个字节
4.3 方案C:SPI+DMA(硬件自主)★
- CPU负载:<1%(仅编码阶段占用CPU)
- 时序精度:±25ns(硬件时钟)
- 最大LED数:1000+(仅受RAM限制)
- RTOS兼容性:✅ 传输期间CPU完全自由
五、生产级驱动代码(SPI+DMA)
5.1 头文件 ws2812b_driver.h
c
#ifndef __WS2812B_DRIVER_H
#define __WS2812B_DRIVER_H
#include "stm32f1xx_hal.h" /* 迁移到F4时改为 stm32f4xx_hal.h */
/* LED配置 */
#define WS2812B_NUM_LEDS 100 /* 灯珠数量 */
#define WS2812B_SPI_FREQ_HZ 2400000 /* 目标SPI频率 */
/* 编码参数:3 SPI位 = 1 WS2812B位 */
#define WS2812B_BITS_PER_LED 24 /* GRB = 8+8+8 */
#define WS2812B_SPI_BITS_PER_BIT 3
#define WS2812B_BYTES_PER_LED ((WS2812B_BITS_PER_LED * WS2812B_SPI_BITS_PER_BIT + 7) / 8)
/* 复位脉冲长度(微秒)*/
#define WS2812B_RESET_US 60
/* 颜色结构体(GRB顺序)*/
typedef struct {
uint8_t g;
uint8_t r;
uint8_t b;
} WS2812B_ColorTypeDef;
/* 驱动句柄 */
typedef struct {
SPI_HandleTypeDef* hspi;
DMA_HandleTypeDef* hdma;
WS2812B_ColorTypeDef leds[WS2812B_NUM_LEDS]; /* RGB缓冲区 */
uint8_t dma_buffer[WS2812B_NUM_LEDS * WS2812B_BYTES_PER_LED]; /* DMA SPI缓冲区 */
uint8_t transfer_busy; /* 传输忙标志 */
} WS2812B_HandleTypeDef;
/* 函数声明 */
HAL_StatusTypeDef WS2812B_Init(WS2812B_HandleTypeDef* hws,
SPI_HandleTypeDef* hspi,
DMA_HandleTypeDef* hdma);
void WS2812B_SetPixel(WS2812B_HandleTypeDef* hws, uint16_t index,
uint8_t r, uint8_t g, uint8_t b);
void WS2812B_SetPixelRGB(WS2812B_HandleTypeDef* hws, uint16_t index,
uint32_t rgb);
void WS2812B_SetAll(WS2812B_HandleTypeDef* hws, uint8_t r, uint8_t g, uint8_t b);
void WS2812B_Clear(WS2812B_HandleTypeDef* hws);
HAL_StatusTypeDef WS2812B_Refresh(WS2812B_HandleTypeDef* hws);
uint8_t WS2812B_IsBusy(WS2812B_HandleTypeDef* hws);
/* 颜色工具函数 */
uint32_t WS2812B_HSVtoRGB(uint16_t hue, uint8_t sat, uint8_t val);
uint32_t WS2812B_GammaCorrect(uint32_t rgb, float gamma);
/* DMA中断回调(需在HAL_SPI_TxCpltCallback中调用)*/
void WS2812B_DMA_TC_Callback(WS2812B_HandleTypeDef* hws);
#endif /* __WS2812B_DRIVER_H */5.2 核心实现 ws2812b_driver.c
c
#include "ws2812b_driver.h"
#include <string.h>
#include <math.h>
/* 编码常量:3位SPI表示1位WS2812B */
#define CODE_0 0x04 /* 0b100 */
#define CODE_1 0x06 /* 0b110 */
/* 编码查找表(加速:预计算每个字节的SPI编码)*/
static uint8_t encode_lut[256][3]; /* 每个字节编码为3字节SPI数据 */
/**
* @brief 初始化编码查找表
* @note 在系统启动时调用一次
*/
static void WS2812B_InitEncodeLUT(void)
{
static uint8_t initialized = 0;
if (initialized) return;
for (uint16_t i = 0; i < 256; i++) {
uint8_t byte = (uint8_t)i;
uint8_t spi_byte = 0;
uint8_t bit_pos = 0;
for (int b = 7; b >= 0; b--) {
uint8_t bit = (byte >> b) & 0x01;
uint8_t code = bit ? CODE_1 : CODE_0;
/* 将3位编码打包到SPI字节 */
if (bit_pos == 0) {
spi_byte = code << 5;
bit_pos = 3;
} else if (bit_pos == 3) {
spi_byte |= code << 2;
bit_pos = 6;
} else { /* bit_pos == 6, 剩余2位不够,存当前字节,新字节存剩余 */
encode_lut[i][0] = spi_byte | (code >> 1);
spi_byte = (code & 0x01) << 7;
bit_pos = 1;
}
}
/* 填充查找表 */
if (bit_pos <= 6) {
encode_lut[i][0] = spi_byte;
}
}
initialized = 1;
}
/**
* @brief 初始化WS2812B驱动
*/
HAL_StatusTypeDef WS2812B_Init(WS2812B_HandleTypeDef* hws,
SPI_HandleTypeDef* hspi,
DMA_HandleTypeDef* hdma)
{
hws->hspi = hspi;
hws->hdma = hdma;
hws->transfer_busy = 0;
/* 初始化编码查找表 */
WS2812B_InitEncodeLUT();
/* 清空缓冲区 */
memset(hws->leds, 0, sizeof(hws->leds));
memset(hws->dma_buffer, 0, sizeof(hws->dma_buffer));
/* 配置SPI */
hspi->Init.Mode = SPI_MODE_MASTER;
hspi->Init.Direction = SPI_DIRECTION_1LINE; /* 仅MOSI */
hspi->Init.DataSize = SPI_DATASIZE_8BIT;
hspi->Init.CLKPolarity = SPI_POLARITY_LOW;
hspi->Init.CLKPhase = SPI_PHASE_1EDGE;
hspi->Init.NSS = SPI_NSS_SOFT;
hspi->Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_32; /* F1:2.25MHz, F4:2.625MHz */
hspi->Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi->Init.TIMode = SPI_TIMODE_DISABLE;
hspi->Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
if (HAL_SPI_Init(hspi) != HAL_OK) {
return HAL_ERROR;
}
/* 配置DMA(Normal模式,单次传输)*/
hdma->Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma->Init.PeriphInc = DMA_PINC_DISABLE;
hdma->Init.MemInc = DMA_MINC_ENABLE;
hdma->Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma->Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma->Init.Mode = DMA_NORMAL;
hdma->Init.Priority = DMA_PRIORITY_HIGH;
/* F1: DMA1_Channel3 for SPI1_TX */
/* F4: DMA2_Stream3_CH3 for SPI1_TX */
if (HAL_DMA_Init(hdma) != HAL_OK) {
return HAL_ERROR;
}
__HAL_LINKDMA(hspi, hdmatx, *hdma);
return HAL_OK;
}
/**
* @brief 将RGB缓冲区编码为DMA SPI缓冲区
* @note 这是唯一需要CPU参与的步骤
*/
static void WS2812B_EncodeBuffer(WS2812B_HandleTypeDef* hws)
{
uint8_t* dst = hws->dma_buffer;
for (uint16_t i = 0; i < WS2812B_NUM_LEDS; i++) {
WS2812B_ColorTypeDef* color = &hws->leds[i];
/* 编码GRB顺序(WS2812B要求)*/
/* 使用查找表加速 */
uint8_t g = color->g;
uint8_t r = color->r;
uint8_t b = color->b;
/* 每个颜色字节编码为3字节SPI数据 */
/* 简化:直接位操作编码(实际可用查找表优化)*/
uint8_t grb[3] = {g, r, b};
for (int c = 0; c < 3; c++) {
uint8_t byte = grb[c];
uint8_t spi_byte = 0;
uint8_t bit_pos = 0;
for (int b = 7; b >= 0; b--) {
uint8_t bit = (byte >> b) & 0x01;
uint8_t code = bit ? CODE_1 : CODE_0;
if (bit_pos == 0) {
spi_byte = code << 5;
bit_pos = 3;
} else if (bit_pos == 3) {
spi_byte |= code << 2;
bit_pos = 6;
} else {
*dst++ = spi_byte | (code >> 1);
spi_byte = (code & 0x01) << 7;
bit_pos = 1;
}
}
if (bit_pos > 0) {
*dst++ = spi_byte;
}
}
}
}
/**
* @brief 刷新LED显示(非阻塞,DMA传输)
*/
HAL_StatusTypeDef WS2812B_Refresh(WS2812B_HandleTypeDef* hws)
{
if (hws->transfer_busy) {
return HAL_BUSY; /* 上一次传输未完成 */
}
/* 编码RGB数据到SPI缓冲区 */
WS2812B_EncodeBuffer(hws);
/* 标记传输开始 */
hws->transfer_busy = 1;
/* 启动DMA传输 */
HAL_StatusTypeDef status = HAL_SPI_Transmit_DMA(
hws->hspi,
hws->dma_buffer,
WS2812B_NUM_LEDS * WS2812B_BYTES_PER_LED
);
if (status != HAL_OK) {
hws->transfer_busy = 0;
return status;
}
return HAL_OK;
}
/**
* @brief DMA传输完成回调
* @note 在HAL_SPI_TxCpltCallback中调用
*/
void WS2812B_DMA_TC_Callback(WS2812B_HandleTypeDef* hws)
{
hws->transfer_busy = 0;
/* 发送RESET脉冲(>50μs低电平)*/
/* 方法:拉低MOSI GPIO并延时 */
HAL_SPI_DeInit(hws->hspi);
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_7; /* PA7 for SPI1_MOSI */
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET);
HAL_Delay(1); /* 1ms = 1000μs >> 50μs */
/* 恢复SPI模式 */
HAL_SPI_Init(hws->hspi);
}
/* ========== 颜色操作函数 ========== */
void WS2812B_SetPixel(WS2812B_HandleTypeDef* hws, uint16_t index,
uint8_t r, uint8_t g, uint8_t b)
{
if (index >= WS2812B_NUM_LEDS) return;
hws->leds[index].r = r;
hws->leds[index].g = g;
hws->leds[index].b = b;
}
void WS2812B_SetPixelRGB(WS2812B_HandleTypeDef* hws, uint16_t index, uint32_t rgb)
{
WS2812B_SetPixel(hws, index,
(rgb >> 16) & 0xFF, /* R */
(rgb >> 8) & 0xFF, /* G */
(rgb >> 0) & 0xFF); /* B */
}
void WS2812B_SetAll(WS2812B_HandleTypeDef* hws, uint8_t r, uint8_t g, uint8_t b)
{
for (uint16_t i = 0; i < WS2812B_NUM_LEDS; i++) {
WS2812B_SetPixel(hws, i, r, g, b);
}
}
void WS2812B_Clear(WS2812B_HandleTypeDef* hws)
{
memset(hws->leds, 0, sizeof(hws->leds));
}
uint8_t WS2812B_IsBusy(WS2812B_HandleTypeDef* hws)
{
return hws->transfer_busy;
}
/* ========== 颜色工具函数 ========== */
/**
* @brief HSV转RGB
* @param hue: 0-359
* @param sat: 0-255
* @param val: 0-255
*/
uint32_t WS2812B_HSVtoRGB(uint16_t hue, uint8_t sat, uint8_t val)
{
uint8_t r, g, b;
if (sat == 0) {
r = g = b = val;
return (r << 16) | (g << 8) | b;
}
uint16_t h = hue % 360;
uint16_t region = h / 60;
uint16_t remainder = (h - (region * 60)) * 255 / 60;
uint8_t p = (val * (255 - sat)) >> 8;
uint8_t q = (val * (255 - ((sat * remainder) >> 8))) >> 8;
uint8_t t = (val * (255 - ((sat * (255 - remainder)) >> 8))) >> 8;
switch (region) {
case 0: r = val; g = t; b = p; break;
case 1: r = q; g = val; b = p; break;
case 2: r = p; g = val; b = t; break;
case 3: r = p; g = q; b = val; break;
case 4: r = t; g = p; b = val; break;
default: r = val; g = p; b = q; break;
}
return (r << 16) | (g << 8) | b;
}
/**
* @brief Gamma校正
* @note WS2812B的亮度响应非线性,需要gamma≈2.2校正
*/
uint32_t WS2812B_GammaCorrect(uint32_t rgb, float gamma)
{
uint8_t r = (rgb >> 16) & 0xFF;
uint8_t g = (rgb >> 8) & 0xFF;
uint8_t b = rgb & 0xFF;
r = (uint8_t)(powf(r / 255.0f, gamma) * 255.0f);
g = (uint8_t)(powf(g / 255.0f, gamma) * 255.0f);
b = (uint8_t)(powf(b / 255.0f, gamma) * 255.0f);
return (r << 16) | (g << 8) | b;
}5.3 使用示例 main.c
c
#include "main.h"
#include "ws2812b_driver.h"
SPI_HandleTypeDef hspi1;
DMA_HandleTypeDef hdma_spi1_tx;
WS2812B_HandleTypeDef hws;
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_SPI1_Init();
MX_DMA_Init();
/* 初始化WS2812B */
WS2812B_Init(&hws, &hspi1, &hdma_spi1_tx);
uint16_t hue = 0;
while (1) {
/* 彩虹动画 */
for (int i = 0; i < WS2812B_NUM_LEDS; i++) {
uint16_t pixel_hue = (hue + (i * 360 / WS2812B_NUM_LEDS)) % 360;
uint32_t rgb = WS2812B_HSVtoRGB(pixel_hue, 255, 255);
rgb = WS2812B_GammaCorrect(rgb, 2.2f);
WS2812B_SetPixelRGB(&hws, i, rgb);
}
/* 刷新显示(非阻塞)*/
if (!WS2812B_IsBusy(&hws)) {
WS2812B_Refresh(&hws);
}
hue = (hue + 5) % 360;
HAL_Delay(20); /* 50 FPS */
}
}
/* DMA传输完成回调 */
void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef* hspi)
{
if (hspi == &hspi1) {
WS2812B_DMA_TC_Callback(&hws);
}
}六、STM32F1 → F4 迁移要点
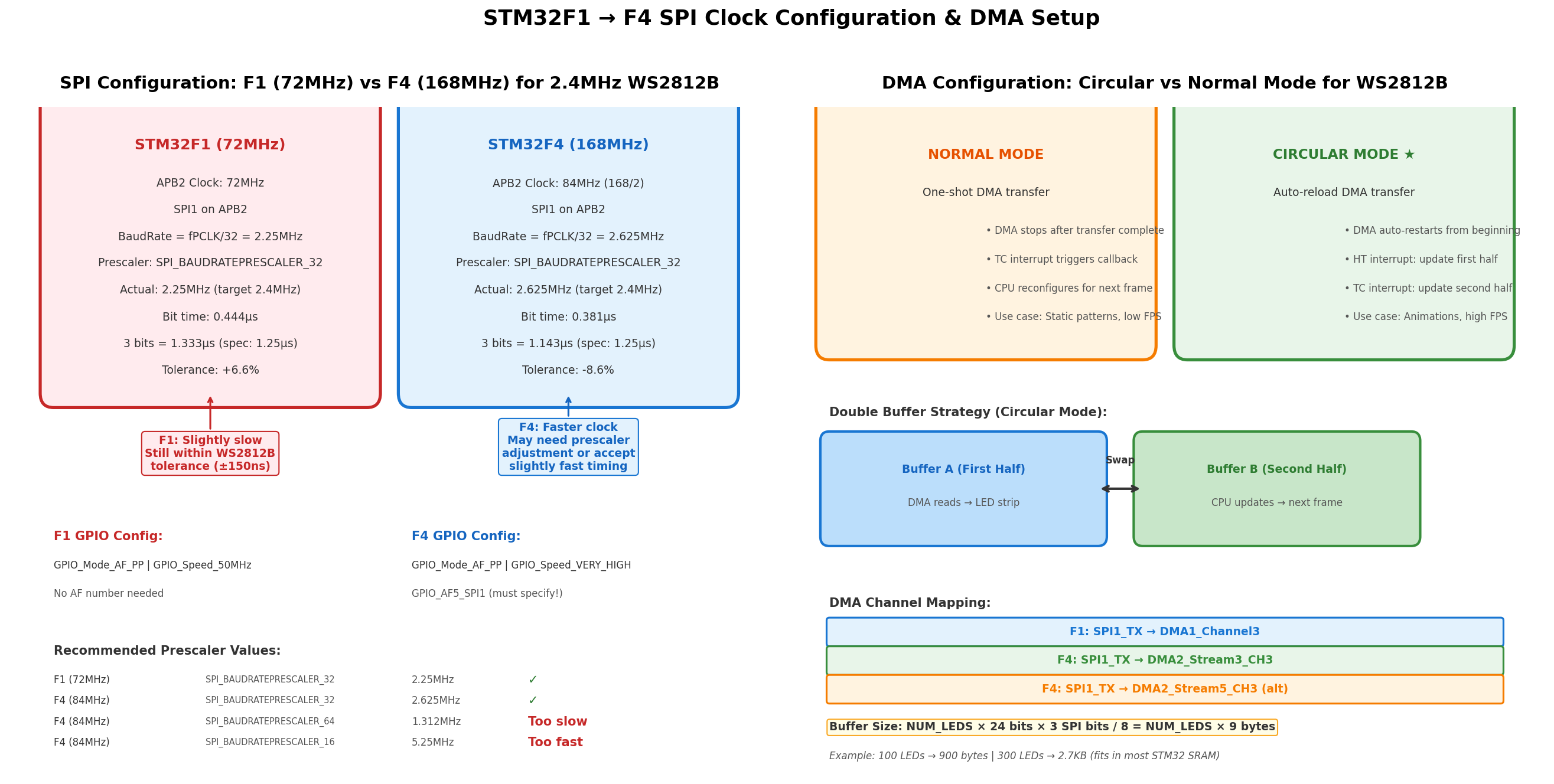
6.1 SPI时钟差异
| 参数 | STM32F1 | STM32F4 | 影响 |
|---|---|---|---|
| APB2时钟 | 72MHz | 84MHz (168/2) | 波特率预分频需重算 |
| SPI1分频32 | 2.25MHz | 2.625MHz | F4略快,仍在容差内 |
| 3位时间 | 1.333μs | 1.143μs | 与1.25μs标称值的偏差 |
| 时序容差 | +6.6% | -8.6% | 均在±150ns范围内 |
6.2 GPIO复用配置
c
/* F1配置 */
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; /* 50MHz */
/* F4配置 */
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Alternate = GPIO_AF5_SPI1; /* 必须指定AF! */
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* 100MHz */6.3 DMA通道映射
| MCU | SPI1_TX DMA | 说明 |
|---|---|---|
| F1 | DMA1_Channel3 | 单一通道 |
| F4 | DMA2_Stream3_CH3 或 DMA2_Stream5_CH3 | 双通道可选 |
陷阱:F4的DMA通道映射与F1完全不同!F1使用"Channel"概念,F4使用"Stream+Channel"组合。查阅Reference Manual确认映射关系。
七、硬件设计要点
7.1 电平转换
WS2812B的DIN引脚要求高电平≥0.7×VDD(即3.5V@5V供电)。3.3V MCU直接驱动时:
- 短距离(<10cm):通常可工作,但可靠性降低
- 长距离或高噪声环境:使用74HCT245电平转换器或74LV1T125
7.2 电源设计
| LED数量 | 最大电流(全白) | 推荐电源 |
|---|---|---|
| 30颗 | 1.8A | 5V/2A |
| 60颗 | 3.6A | 5V/5A |
| 100颗 | 6A | 5V/10A |
| 300颗 | 18A | 5V/20A(分区供电) |
关键规则:
- 每30颗LED增加一个1000μF退耦电容
- 电源线径≥0.5mm²(AWG20)或更粗
- 长灯带采用分区供电(每50-100颗从电源直接引线)
7.3 信号完整性
- DIN引脚串联33Ω电阻抑制振铃
- 数据线长度<1m,超过时加缓冲器(如74HCT245)
- 避免数据线与电机、继电器等噪声源平行布线
八、完整驱动状态机
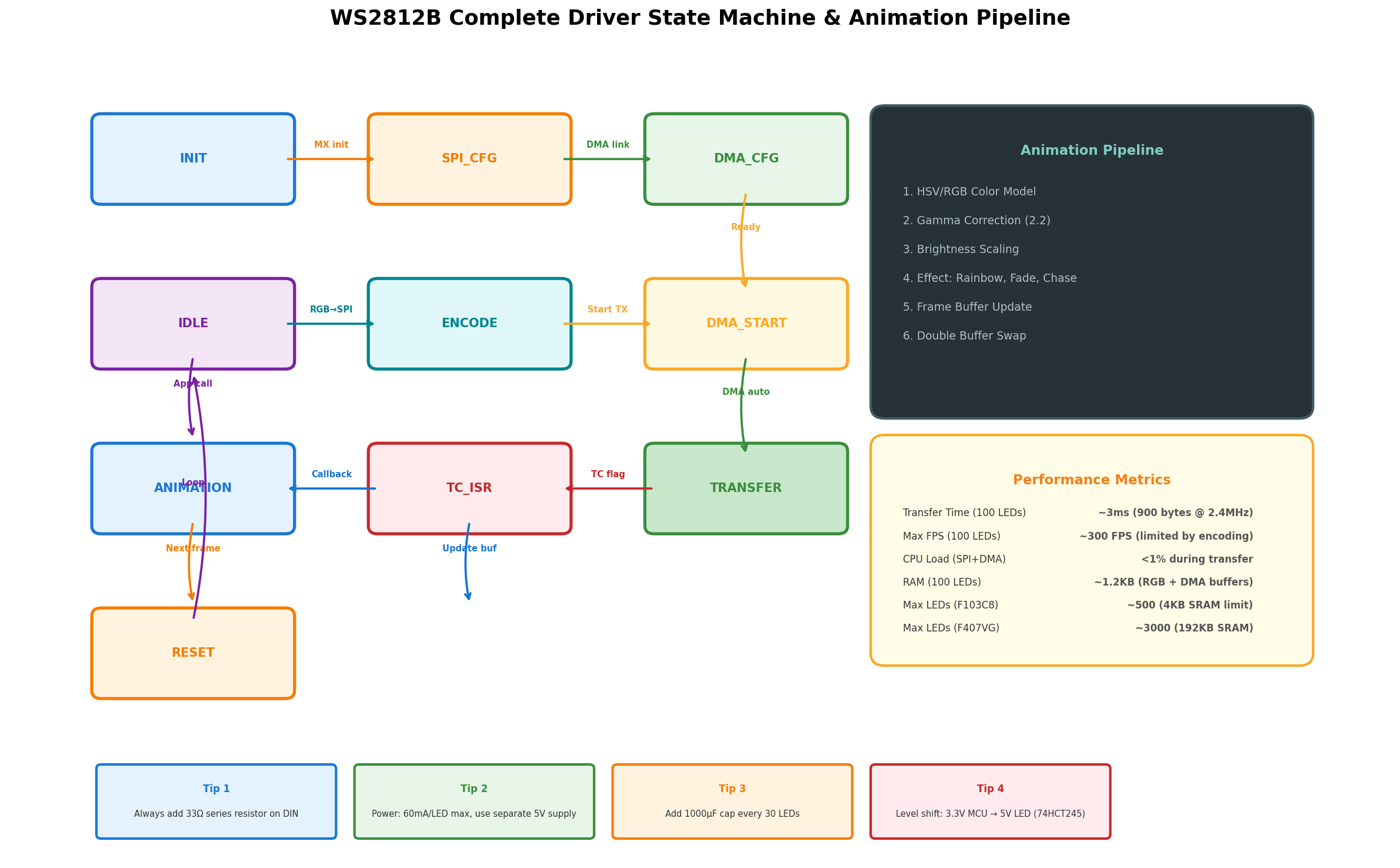
上图展示了驱动的完整状态流转:
| 状态 | 说明 | CPU参与 |
|---|---|---|
| INIT | 初始化SPI和DMA | ✓ |
| SPI_CFG | 配置SPI波特率、模式 | ✓ |
| DMA_CFG | 链接DMA到SPI | ✓ |
| IDLE | 等待应用层调用 | ✗ |
| ENCODE | RGB→SPI编码 | ✓ |
| DMA_START | 启动DMA传输 | ✓ |
| TRANSFER | DMA硬件自主传输 | ✗ |
| TC_ISR | 传输完成中断 | ✓(仅回调) |
| ANIMATION | 计算下一帧动画 | ✓ |
| RESET | 发送>50μs复位脉冲 | ✓ |
九、调试技巧与常见问题
9.1 示波器验证
用示波器捕获MOSI波形,验证:
- 高电平时间:0.35-0.95μs(取决于编码)
- 低电平时间:0.30-0.95μs
- 总周期:~1.25μs
- RESET脉冲:>50μs
9.2 常见问题排查
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 全部不亮 | RESET脉冲不足 | 确保>50μs低电平 |
| 颜色错位 | GRB/RGB顺序错误 | 检查数据顺序为GRB |
| 随机闪烁 | 电源纹波过大 | 增加退耦电容 |
| 前几颗正常,后面乱 | 信号衰减 | 加33Ω电阻,缩短数据线 |
| 亮度不均匀 | 无Gamma校正 | 启用gamma=2.2 |
| F4上颜色偏红 | SPI时钟过快 | 检查分频器,尝试/64 |
| DMA不触发 | 通道映射错误 | 核对F4 DMA Stream/Channel |
十、总结
从GPIO模拟到SPI+DMA,WS2812B的驱动开发是嵌入式时序控制的经典案例。本文的核心要点:
- NRZ协议的本质是时间编码:高电平持续时间决定比特值,±150ns容差要求硬件级精确时钟
- SPI模拟是最佳折中:用硬件时钟替代软件延时,3 SPI位编码1个WS2812B位
- DMA是生产级必备:零CPU干预,RTOS友好,支持1000+ LED
- F4迁移注意三点:APB2=84MHz(分频器重算)、GPIO_AF5_SPI1(复用功能)、DMA2_Stream3/5(通道映射)
- 硬件设计不可忽视:电平转换、电源退耦、信号完整性是稳定性的基础
掌握SPI+DMA驱动WS2812B的方法,不仅能解决LED控制问题,更能培养对DMA双缓冲 、硬件时序编码 、中断驱动架构的深入理解------这些技能在音频、视频、通信等高速数据传输场景中具有广泛的迁移价值。
转载自:https://blog.csdn.net/u014727709/article/details/162298830
欢迎 👍点赞✍评论⭐收藏,欢迎指正