一、文章简介
Cartographer 的完整 SLAM 系统并不是"订阅到一帧激光点云后,直接进行扫描匹配"这么简单。
从 ROS 角度看,用户只需要发布 /scan、/points_raw、/imu、/odom 等 Topic;但从 Cartographer Core 的角度看,这些消息还必须经历 ROS 消息转换、TF 坐标变换、时间排序、不同传感器类型分发、局部 SLAM 处理以及后端 Node 创建等流程,最终才能进入后续的 Submap、回环检测和全局优化模块。
这一篇主要解决以下问题:
MapBuilder到底是什么,它负责创建哪些对象?PoseGraph2D、OptimizationProblem2D、LocalTrajectoryBuilder2D分别什么时候创建?- 为什么外部传感器数据不是直接进入
LocalTrajectoryBuilder2D? CollatedTrajectoryBuilder到底负责什么?GlobalTrajectoryBuilder为什么名字里有 Global,却不是 PoseGraph 后端?- 一帧激光什么时候会真正变成 PoseGraph 中的 Node?
CollatedTrajectoryBuilder与RangeDataCollator有什么区别?
本文不深入扫描匹配、Submap 概率栅格更新、回环检测与 Ceres 位姿图优化的内部算法,而是先把系统入口、对象关系和传感器数据链路讲清楚。Cartographer 的 MapBuilder 确实负责创建 PoseGraph 与 trajectory builder 链路,而 ROS 数据通常经由 SensorBridge 转成 Cartographer 内部数据再送入 trajectory builder。
二、先看总处理链:一帧传感器数据到底走到哪里
先把完整逻辑固定下来,后面所有源码分析都围绕这条链展开。
ROS 传感器数据
│
├── /scan、/points_raw
├── /imu
├── /odom
└── /fix、Landmark 等
↓
cartographer_ros::Node
↓
MapBuilderBridge
↓
SensorBridge
↓
TrajectoryBuilderInterface::AddSensorData(...)
↓
CollatedTrajectoryBuilder
↓
Collator / TrajectoryCollator
↓
GlobalTrajectoryBuilder
├── LocalTrajectoryBuilder2D
│ ↓
│ PoseExtrapolator
│ ↓
│ Scan Matching
│ ↓
│ ActiveSubmaps2D
│
└── PoseGraph2D
↓
Node / Submap / Constraint
↓
回环检测与全局优化这条链里最需要先记住的一点是:
ROS 层传感器数据并不会直接进入 LocalTrajectoryBuilder2D。
真正的顺序是:
ROS 回调
↓
SensorBridge
↓
CollatedTrajectoryBuilder
↓
GlobalTrajectoryBuilder
↓
LocalTrajectoryBuilder2D也就是说,LocalTrajectoryBuilder2D 是 Local SLAM 前端的核心,但它并不是 ROS Topic 的直接接收者。
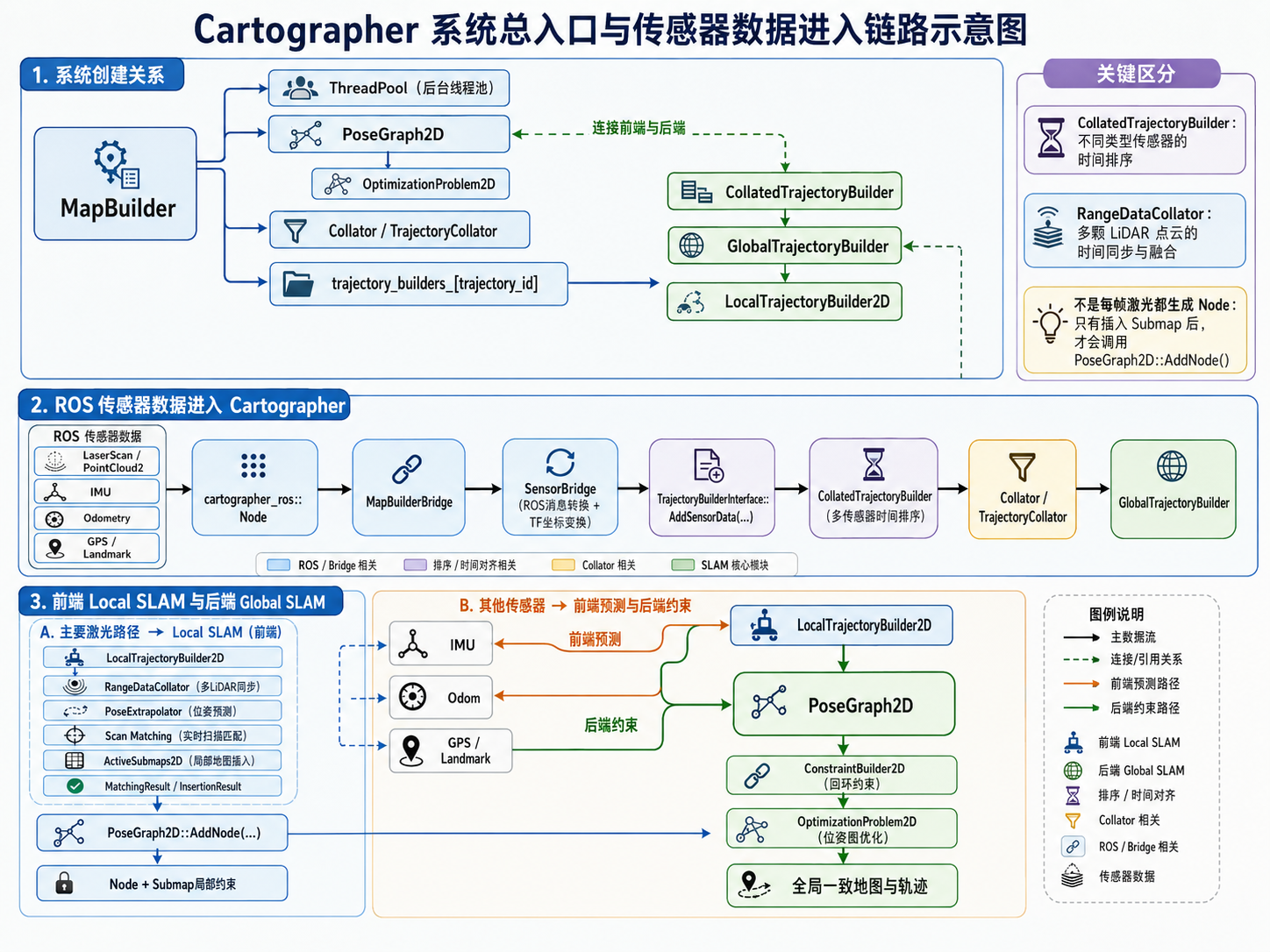
三、Cartographer 的核心对象关系
Cartographer 中最容易混淆的是几个名字很像的对象。先从"谁持有谁"的角度看。
MapBuilder
│
├── ThreadPool
│
├── PoseGraph2D
│ └── OptimizationProblem2D
│
├── Collator / TrajectoryCollator
│
└── trajectory_builders_[trajectory_id]
└── CollatedTrajectoryBuilder
└── GlobalTrajectoryBuilder
├── LocalTrajectoryBuilder2D
└── PoseGraph2D*这张关系图非常重要。
MapBuilder 是总装配器。它创建整个系统共享的对象,例如 PoseGraph、线程池和传感器排序器。
每条 trajectory 会有一个最外层 CollatedTrajectoryBuilder。这个对象负责接收外部传感器数据,并保证不同传感器消息尽量按时间顺序进入后续模块。
CollatedTrajectoryBuilder 内部包装 GlobalTrajectoryBuilder。而 GlobalTrajectoryBuilder 又持有 Local SLAM 前端对象 LocalTrajectoryBuilder2D,同时保存对全局后端 PoseGraph2D 的引用。
所以可以把这些对象理解为:
| 对象 | 核心职责 |
|---|---|
MapBuilder |
创建并管理整套 Cartographer SLAM 系统 |
PoseGraph2D |
管理 Node、Submap、局部约束、回环约束与全局优化 |
OptimizationProblem2D |
保存优化变量、约束残差,调用 Ceres 求解 |
CollatedTrajectoryBuilder |
对不同类型传感器数据进行时间排序 |
GlobalTrajectoryBuilder |
把 Local SLAM 输出交给 PoseGraph |
LocalTrajectoryBuilder2D |
实时位姿预测、扫描匹配、局部 Submap 更新 |
RangeDataCollator |
多颗 LiDAR 点云时间同步与融合 |
官方 Cartographer 源码中,MapBuilder 创建 PoseGraph,AddTrajectoryBuilder() 创建并包装轨迹构建器;cartographer_ros 则提供 ROS 接入层。
四、MapBuilder:Cartographer 的总装配器
4.1 MapBuilder 是什么
MapBuilder 可以理解为 Cartographer Core 的系统管理器。
它不负责处理某一帧激光,也不负责执行某一次扫描匹配。它更像是整个 SLAM 系统的"总工厂",负责根据配置文件创建一套可运行的 Cartographer 系统。
它主要做四类工作:
第一,创建后台线程池。Cartographer 前端需要实时运行,而回环检测、约束构建、位姿图优化等任务比较耗时,通常放在后台线程中异步执行。
第二,创建 PoseGraph。对于 2D 模式,创建 PoseGraph2D;对于 3D 模式,创建 PoseGraph3D。
第三,创建全局传感器时间排序器。这个排序器后续会被 CollatedTrajectoryBuilder 使用,用来协调激光、IMU、Odom 等消息的处理顺序。
第四,为每一条 trajectory 创建 Local SLAM、GlobalTrajectoryBuilder 与 CollatedTrajectoryBuilder。
因此,MapBuilder 创建时并不代表"已经开始建图";它只是先把整个 SLAM 系统的基础框架准备好。
4.2 MapBuilder 构造函数
下面是 MapBuilder::MapBuilder() 的核心逻辑简化版。
MapBuilder::MapBuilder(const proto::MapBuilderOptions& options)
: options_(options),
thread_pool_(options.num_background_threads()) {
// 当前实例只能使用 2D 或 3D TrajectoryBuilder 之一。
CHECK(options.use_trajectory_builder_2d() ^
options.use_trajectory_builder_3d());
// 2D 模式:创建全局 PoseGraph2D。
if (options.use_trajectory_builder_2d()) {
pose_graph_ = absl::make_unique<PoseGraph2D>(
options_.pose_graph_options(),
// PoseGraph2D 内部持有优化问题。
absl::make_unique<optimization::OptimizationProblem2D>(
options_.pose_graph_options()
.optimization_problem_options()),
// 回环、约束构建、优化等后台任务使用线程池。
&thread_pool_);
}
// 创建传感器时间排序器。
if (options.collate_by_trajectory()) {
sensor_collator_ =
absl::make_unique<sensor::TrajectoryCollator>();
} else {
sensor_collator_ =
absl::make_unique<sensor::Collator>();
}
}这段代码中有几个关键点。
第一,PoseGraph2D 在 MapBuilder 初始化时创建,不是在第一帧激光到来时创建。也就是说,后端图优化模块在系统启动时就已经存在。
第二,OptimizationProblem2D 被传给 PoseGraph2D。后续进行全局优化时,PoseGraph2D 负责管理哪些 Node、Submap 和 Constraint 应参与优化;OptimizationProblem2D 则负责将它们组织成真正的 Ceres 优化问题。
第三,ThreadPool 是全局后台线程池。Local SLAM 前端通常由传感器回调推动,强调实时性;PoseGraph 的回环搜索、约束构建与全局优化则可以异步执行,避免阻塞前端。
第四,构造函数末尾的 sensor_collator_ 不是多雷达融合器,而是全局"多传感器时间排序器"。它处理激光、IMU、Odom 等不同类型数据的时间关系。
4.3 为什么 2D 和 3D 只能二选一
源码中的这一句:
CHECK(options.use_trajectory_builder_2d() ^
options.use_trajectory_builder_3d());使用的是异或运算。
2D = true, 3D = false:合法
2D = false,3D = true :合法
2D = true, 3D = true :非法
2D = false,3D = false:非法原因是 2D 与 3D 的核心结构不同。
2D 中使用的是:
LocalTrajectoryBuilder2D
PoseGraph2D
Submap2D
ActiveSubmaps2D
OptimizationProblem2D3D 中则使用对应的 3D 版本。二者的状态变量维度、地图表示、扫描匹配方式、重力处理方式和优化过程都有区别,因此同一个 MapBuilder 不允许同时运行 2D 与 3D trajectory builder。
五、Trajectory:不是一条轨迹线,而是一套 SLAM 任务
很多人看到 trajectory_id 时,会以为它只是 RViz 中显示路径的编号。实际上它更像"一次连续 SLAM 任务"的编号。
例如:
trajectory 0:机器人第一次在线建图
trajectory 1:加载旧地图后重新定位
trajectory 2:第二台机器人开始建图
trajectory 3:离线播放另一段 rosbag每条 trajectory 都有自己的 Local SLAM 状态,包括:
- 自己的
LocalTrajectoryBuilder2D - 自己的 IMU 缓存
- 自己的 Odom 缓存
- 自己的 PoseExtrapolator
- 自己的一组 Active Submaps
- 自己生成的 Node
- 自己的局部轨迹
但这些 trajectory 可以共享同一个 PoseGraph2D。因此,多机器人、多个建图片段或多个定位轨迹,最终仍然可以通过后端约束放进同一个全局地图中。
trajectory_id 的生成方式很简单:
const int trajectory_id = trajectory_builders_.size();例如当前还没有 trajectory:
trajectory_builders_.size() = 0第一次创建时:
trajectory_id = 0第二次创建时:
trajectory_id = 1所以 trajectory_id 是 Cartographer 内部的轨迹编号,不一定等于机器人编号,也不一定等于 Topic 名。
六、MapBuilder::AddTrajectoryBuilder():一整条 SLAM 链路在这里创建
MapBuilder::AddTrajectoryBuilder() 是本文最关键的函数之一。
它并不是简单创建一个对象,而是一次性创建当前 trajectory 对应的完整数据处理链。
int MapBuilder::AddTrajectoryBuilder(
const std::set<SensorId>& expected_sensor_ids,
const proto::TrajectoryBuilderOptions& trajectory_options,
LocalSlamResultCallback callback) {
// 1. 分配当前轨迹编号。
const int trajectory_id = trajectory_builders_.size();
// 2. 创建当前 trajectory 专属的 Local SLAM 前端。
std::unique_ptr<LocalTrajectoryBuilder2D> local_builder;
if (trajectory_options.has_trajectory_builder_2d_options()) {
local_builder = absl::make_unique<LocalTrajectoryBuilder2D>(
trajectory_options.trajectory_builder_2d_options(),
SelectRangeSensorIds(expected_sensor_ids));
}
// 3. 创建前后端连接器。
auto global_builder = CreateGlobalTrajectoryBuilder2D(
std::move(local_builder),
trajectory_id,
static_cast<PoseGraph2D*>(pose_graph_.get()),
callback,
pose_graph_odometry_motion_filter);
// 4. 在最外层套上时间排序包装器。
trajectory_builders_.push_back(
absl::make_unique<CollatedTrajectoryBuilder>(
trajectory_options,
sensor_collator_.get(),
trajectory_id,
expected_sensor_ids,
std::move(global_builder)));
return trajectory_id;
}这段代码的创建顺序是:
MapBuilder::AddTrajectoryBuilder()
↓
创建 LocalTrajectoryBuilder2D
↓
创建 GlobalTrajectoryBuilder
↓
创建 CollatedTrajectoryBuilder
↓
保存到 trajectory_builders_
↓
返回 trajectory_id最终对象包装关系为:
CollatedTrajectoryBuilder
↓ 包装
GlobalTrajectoryBuilder
↓ 持有
LocalTrajectoryBuilder2D并且 GlobalTrajectoryBuilder 还持有一个指向全局 PoseGraph2D 的指针。
这里最重要的一点是:ROS 层最后拿到的不是 Local SLAM 对象,而是最外层的 CollatedTrajectoryBuilder。因此,所有传感器数据首先都会进入 CollatedTrajectoryBuilder。
官方源码中的 MapBuilder::AddTrajectoryBuilder() 正是在此处创建 LocalTrajectoryBuilder、GlobalTrajectoryBuilder,并将其交给 CollatedTrajectoryBuilder 包装。
七、expected_sensor_ids:系统预期会接收哪些数据
AddTrajectoryBuilder() 的第一个参数是:
const std::set<SensorId>& expected_sensor_ids它表示当前 trajectory 预计会收到哪些传感器数据。
例如单雷达 2D SLAM 系统可能是
scan
imu
odom多雷达系统可能是:
front_lidar
rear_lidar
imu
odomCartographer 的 SensorId 不只是一个字符串,它通常还包含传感器类型。
RANGE
IMU
ODOMETRY
FIXED_FRAME_POSE
LANDMARK各类型含义如下:
| 类型 | 含义 |
|---|---|
RANGE |
激光雷达、2D LaserScan、3D PointCloud2 |
IMU |
角速度、线加速度 |
ODOMETRY |
轮速里程计、视觉里程计、外部里程计 |
FIXED_FRAME_POSE |
GPS、GNSS、外部绝对位姿 |
LANDMARK |
AprilTag、二维码、人工地标等约束 |
expected_sensor_ids 有两个作用。
第一个作用是告诉 Cartographer:当前轨迹可能会收到哪些输入。
第二个作用是让 Collator 为这些传感器建立等待队列。
例如有三个传感器:
scan
imu
odom那么系统内部概念上会维护:
Queue(trajectory 0, scan)
Queue(trajectory 0, imu)
Queue(trajectory 0, odom)如果你在配置中声明了 imu,但实际 IMU Topic 没有发布,时间排序器可能会等待 IMU 数据,导致激光迟迟不能进入 Local SLAM。
八、SelectRangeSensorIds():为什么 Local SLAM 只拿 LiDAR ID
expected_sensor_ids 里可能包含 LiDAR、IMU、Odom、GPS、Landmark。
但 LocalTrajectoryBuilder2D 初始化时,需要重点知道的是:
"当前有哪几颗 LiDAR 会往 Local SLAM 输入 range data。"
因此,Cartographer 会筛选 RANGE 类型传感器。
std::vector<std::string> SelectRangeSensorIds(
const std::set<SensorId>& expected_sensor_ids) {
std::vector<std::string> range_sensor_ids;
for (const SensorId& sensor_id : expected_sensor_ids) {
if (sensor_id.type == SensorId::SensorType::RANGE) {
range_sensor_ids.push_back(sensor_id.id);
}
}
return range_sensor_ids;
}假设系统传感器为:
front_lidar
rear_lidar
imu
odom那么最终传给 LocalTrajectoryBuilder2D 的 LiDAR 列表为:
front_lidar
rear_lidar这两个 ID 后续会被 Local SLAM 内部的 RangeDataCollator 使用。
也就是说,RangeDataCollator 不关心 IMU 和 Odom;它只关心多颗 LiDAR 的点云如何按时间进行融合。
九、LocalTrajectoryBuilder2D:真正的 Local SLAM 前端
LocalTrajectoryBuilder2D 是 Cartographer 前端 Local SLAM 的核心对象。
它负责当前时刻机器人局部位姿的实时估计,同时将当前激光数据写入局部 Submap。
它内部主要完成以下流程:
激光点云输入
↓
RangeDataCollator 多雷达同步
↓
PoseExtrapolator 位姿预测
↓
点云去畸变
↓
体素滤波
↓
实时扫描匹配
↓
运动滤波
↓
插入 ActiveSubmaps2D
↓
返回 MatchingResult其中,PoseExtrapolator 会使用 IMU 和 Odom 的历史数据预测当前时刻位姿。
扫描匹配会使用预测位姿作为初值,在当前局部 Submap 中寻找最匹配的机器人姿态。
插入 ActiveSubmaps2D 后,当前点云会成为局部地图的一部分。
但要注意:LocalTrajectoryBuilder2D 不负责回环检测,不负责全局地图纠正,也不负责优化所有历史轨迹。它只解决"当前机器人在局部地图中的实时位姿"和"局部地图更新"问题。
十、GlobalTrajectoryBuilder:前端与后端之间的桥梁
10.1 它不是 PoseGraph 后端
很多人会被名字误导,认为 GlobalTrajectoryBuilder 就是 Global SLAM 后端。
实际上不是。
真正的 Global SLAM 后端是:
PoseGraph2D
ConstraintBuilder2D
OptimizationProblem2D而 GlobalTrajectoryBuilder 更像一个"前后端数据转接器"。
它做的事情是:
- 激光送进 LocalTrajectoryBuilder2D;
- IMU 同时送进 LocalTrajectoryBuilder2D 与 PoseGraph2D;
- Odom 同时送进 LocalTrajectoryBuilder2D 与 PoseGraph2D;
- GPS、Landmark 等绝对约束送到 PoseGraph2D;
- Local SLAM 产生插入结果后,调用 PoseGraph2D 创建 Node;
- 将 Local SLAM 结果回调给 ROS 层。
因此,可以把它理解为:
Local SLAM 与 PoseGraph 之间的连接器10.2 激光进入 GlobalTrajectoryBuilder 后的处理
void GlobalTrajectoryBuilder::AddSensorData(
const std::string& sensor_id,
const sensor::TimedPointCloudData& timed_point_cloud_data) {
// 激光进入 Local SLAM 前端。
auto matching_result =
local_trajectory_builder_->AddRangeData(
sensor_id,
timed_point_cloud_data);
// 当前没有形成有效 Local SLAM 输出。
if (matching_result == nullptr) {
return;
}
// 只有插入 Submap 时,才会进一步创建 Node。
if (matching_result->insertion_result != nullptr) {
const auto node_id = pose_graph_->AddNode(
matching_result->insertion_result->constant_data,
trajectory_id_,
matching_result->insertion_result->insertion_submaps);
}
// 将局部 SLAM 结果回调给 ROS 层。
local_slam_result_callback_(
trajectory_id_,
matching_result->time,
matching_result->local_pose,
std::move(matching_result->range_data_in_local),
nullptr);
}这段代码可以分成三层理解。
第一层,点云被送入 LocalTrajectoryBuilder2D::AddRangeData()。
到这里,才真正进入 Local SLAM 前端。
第二层,Local SLAM 不一定每次都返回结果。
例如以下情况都可能返回空:
多颗 LiDAR 的同步数据尚未准备好
当前点云累计数量还不够
IMU 初始化尚未完成
数据时间没有覆盖当前处理区间
当前 range data 不满足有效条件因此:
matching_result == nullptr并不一定意味着系统出错,只表示"当前还无法形成一帧完整的 Local SLAM 输入"。
第三层,只有当前帧成功插入 ActiveSubmaps2D 时,才会有 insertion_result。
之后才调用:
pose_graph_->AddNode(...)这也意味着:
不是每帧 LiDAR 都生成 Node。Cartographer 的 GlobalTrajectoryBuilder 会把 range data 送入 LocalTrajectoryBuilder;当 Local SLAM 返回插入结果时,再向 PoseGraph 添加 Node。
十一、MatchingResult 与 InsertionResult 的区别
这两个对象特别容易混淆。
MatchingResult 表示:
"Local SLAM 已经对当前批次点云完成了位姿估计。"
它一般包含:
当前处理时刻
当前 local pose
局部坐标系下的点云
扫描匹配结果
是否插入 Submap 的结果而 InsertionResult 表示:
"当前帧不仅完成了扫描匹配,而且真的被插入到了 ActiveSubmaps2D。"
它包含:
当前帧不可变点云数据
当前帧插入的 Submap 列表
后续创建 PoseGraph Node 所需的数据关系如下:
有效点云
↓
LocalTrajectoryBuilder2D
↓
MatchingResult
↓
是否通过 MotionFilter?
├── 否:不插入 Submap,不生成 Node
└── 是:生成 InsertionResult
↓
PoseGraph2D::AddNode()所以更准确的说法是:
一帧有效 Local SLAM 结果,不一定对应一个 PoseGraph Node。只有真正插入 Submap 的帧,才会变成 Node。
十二、CollatedTrajectoryBuilder:外部传感器的第一站
12.1 为什么不能直接处理激光
现实系统中,IMU、Odom、LiDAR 不会严格同步到达。
例如:
10.000 s:IMU
10.005 s:IMU
10.010 s:Odom
10.020 s:LiDAR
10.021 s:IMU
10.030 s:Odom如果 LiDAR 在 10.020 秒到达时立刻进入 Local SLAM,但对应时刻附近的 IMU 或 Odom 数据还未进入系统,那么 PoseExtrapolator 就可能无法获得完整的预测信息。
这会造成:
当前帧预测位姿不准确
扫描匹配初值变差
局部匹配更容易陷入错误位置
地图出现错位
轨迹发生抖动因此,Cartographer 在外层使用 CollatedTrajectoryBuilder 先对不同类型传感器数据进行时间排序。
它的目标不是让所有数据物理上完全同步,而是尽量保证:
较早时间的数据先处理;
避免明显的时间倒序;
避免关键传感器数据尚未到达时过早处理激光。12.2 CollatedTrajectoryBuilder 的内部对象关系
CollatedTrajectoryBuilder
│
├── trajectory_id
├── sensor_collator_
├── expected_sensor_ids
└── wrapped_trajectory_builder_
↓
GlobalTrajectoryBuilder它内部最重要的成员是:
std::unique_ptr<TrajectoryBuilderInterface>
wrapped_trajectory_builder_;这个 wrapped_trajectory_builder_ 实际上就是 GlobalTrajectoryBuilder。
因此外部传感器数据先进入:
CollatedTrajectoryBuilder排序完成后,才被转发给:
GlobalTrajectoryBuilder12.3 CollatedTrajectoryBuilder 构造函数
CollatedTrajectoryBuilder::CollatedTrajectoryBuilder(
const proto::TrajectoryBuilderOptions& trajectory_options,
sensor::CollatorInterface* sensor_collator,
const int trajectory_id,
const std::set<SensorId>& expected_sensor_ids,
std::unique_ptr<TrajectoryBuilderInterface>
wrapped_trajectory_builder)
: sensor_collator_(sensor_collator),
trajectory_id_(trajectory_id),
wrapped_trajectory_builder_(
std::move(wrapped_trajectory_builder)) {
absl::flat_hash_set<std::string>
expected_sensor_id_strings;
for (const auto& sensor_id : expected_sensor_ids) {
expected_sensor_id_strings.insert(sensor_id.id);
}
sensor_collator_->AddTrajectory(
trajectory_id_,
expected_sensor_id_strings,
[this](const std::string& sensor_id,
std::unique_ptr<sensor::Data> data) {
HandleCollatedSensorData(
sensor_id, std::move(data));
});
}这里最关键的是:
sensor_collator_->AddTrajectory(...)这句代码是在告诉 Collator:
"当前 trajectory 预计会收到哪些传感器的数据;当某条数据可以安全放行时,就调用 HandleCollatedSensorData()。"
假设当前 trajectory 需要:
scan
imu
odom那么排序器会维护类似如下的队列结构:
trajectory 0:
scan queue
imu queue
odom queue每个 Topic 到来的消息,都先进入对应队列。
等排序器确认时间顺序合理后,才会继续向后分发。
12.4 传感器数据如何进入 Collator
void CollatedTrajectoryBuilder::AddData(
std::unique_ptr<sensor::Data> data) {
sensor_collator_->AddSensorData(
trajectory_id_,
std::move(data));
}这里没有扫描匹配,没有 TF 查询,也没有地图更新。
它只做一件事:
把当前数据放进时间排序器。从外部角度看,路径是:
AddSensorData(...)
↓
封装为 sensor::Data
↓
CollatedTrajectoryBuilder::AddData(...)
↓
Collator::AddSensorData(...)
↓
进入对应传感器队列12.5 排序完成后如何转发
当 Collator 判定某条数据可以放行后,会触发回调:
void CollatedTrajectoryBuilder::HandleCollatedSensorData(
const std::string& sensor_id,
std::unique_ptr<sensor::Data> data) {
// 统计当前传感器数据频率。
UpdateRateStatistic(sensor_id, data->GetTime());
// 根据真实数据类型,调用内部 GlobalTrajectoryBuilder。
data->AddToTrajectoryBuilder(
wrapped_trajectory_builder_.get());
}关键是:
data->AddToTrajectoryBuilder(
wrapped_trajectory_builder_.get());这是 C++ 多态分发。
如果 data 实际是激光点云:
TimedPointCloudData它会调用:
GlobalTrajectoryBuilder::AddSensorData(
sensor_id,
TimedPointCloudData)如果是 IMU:
ImuData它会调用:
GlobalTrajectoryBuilder::AddSensorData(
sensor_id,
ImuData)如果是 Odom:
OdometryData它会调用:
GlobalTrajectoryBuilder::AddSensorData(
sensor_id,
OdometryData)这就是 Cartographer 使用统一传感器接口处理多种消息类型的方式。CollatedTrajectoryBuilder 会向 Collator 注册 trajectory 的预期传感器与回调,并在数据被排序后将其分发到内部 TrajectoryBuilder。
十三、Collator 与 TrajectoryCollator 的区别
MapBuilder 创建排序器时,可能使用:
sensor::Collator或者:
sensor::TrajectoryCollator二者目标相同:让传感器数据尽量按正确时间顺序进入系统。
区别在于它们管理队列的范围不同。
Collator 使用一个全局排序器。不同 trajectory 的传感器队列可能都在同一个全局队列结构中。
trajectory 0:
scan / imu / odom
trajectory 1:
scan / imu / odom
所有队列共同参与全局排序TrajectoryCollator 则为每条 trajectory 分配独立排序器。
trajectory 0:
独立 scan / imu / odom 排序器
trajectory 1:
独立 scan / imu / odom 排序器对于单机器人、单 trajectory 场景,两者通常不会带来特别明显的区别。
但在多机器人、多轨迹、离线加载多个建图任务时,TrajectoryCollator 的隔离性更好:trajectory 0 某个传感器卡住,不一定会影响 trajectory 1。
十四、为什么 Collator 会等待数据
假设机器人传感器频率如下:
IMU:100 Hz
Odom:50 Hz
LiDAR:10 Hz某个时刻三个队列的队头可能是:
IMU 队头:10.020 s
Odom 队头:10.018 s
LiDAR 队头:10.030 s此时 LiDAR 的 10.030 秒数据不能简单立刻处理,因为系统还需要确认:IMU 或 Odom 是否会补来一条更早的消息,例如 10.025 秒。
可以将"当前安全可放行时间"的概念理解为:
t_{\text{dispatch}}
=
\min
\left(
t_{\text{head}}^{\text{imu}},
t_{\text{head}}^{\text{odom}},
t_{\text{head}}^{\text{lidar}},
\ldots
\right)这个公式表达的是一个直观概念:系统不能只看 LiDAR 自己的时间,而要看所有参与排序的传感器队列状态。
实际的 OrderedMultiQueue 还会处理空队列、阻塞队列、传感器结束、未知时间戳等复杂情况,但从工程理解上,可以把它视为:
确认当前数据前面不会再有更早数据插进来,
再允许它进入后续 SLAM 模块。因此,如果你配置了 IMU 或 Odom,但对应 Topic 没有数据,Cartographer 可能表现为:
LiDAR 已经有数据
但 Local SLAM 没有输出
轨迹不更新
地图不增长
系统像卡住一样此时首先应该检查的不是扫描匹配,而是:
IMU Topic 是否正常发布
Odom Topic 是否正常发布
传感器时间戳是否单调递增
传感器配置名称是否与实际 Topic 对应
Collator 是否在等待某个 expected sensor十五、ROS 数据如何真正进入 Cartographer
Cartographer Core 不直接认识 ROS 的:
sensor_msgs::LaserScan
sensor_msgs::PointCloud2
sensor_msgs::Imu
nav_msgs::OdometryROS 数据需要由 cartographer_ros 中的桥接层转换。
核心对象是:
MapBuilderBridge
SensorBridgeMapBuilderBridge 负责 ROS 系统和 Cartographer Core 之间的整体管理。
SensorBridge 负责把具体 ROS 消息转换成 Cartographer 内部数据。
15.1 MapBuilderBridge 创建 SensorBridge
int MapBuilderBridge::AddTrajectory(
const std::set<SensorId>& expected_sensor_ids,
const TrajectoryOptions& trajectory_options) {
const int trajectory_id =
map_builder_->AddTrajectoryBuilder(
expected_sensor_ids,
trajectory_options.trajectory_builder_options,
local_slam_result_callback);
sensor_bridges_[trajectory_id] =
absl::make_unique<SensorBridge>(
trajectory_options.num_subdivisions_per_laser_scan,
trajectory_options.ignore_out_of_order_messages,
trajectory_options.tracking_frame,
node_options_.lookup_transform_timeout_sec,
tf_buffer_,
map_builder_->GetTrajectoryBuilder(trajectory_id));
return trajectory_id;
}这段代码说明:
SensorBridge 内部保存的 trajectory builder 指针,来自:
map_builder_->GetTrajectoryBuilder(trajectory_id)而这个对象就是最外层的:
CollatedTrajectoryBuilder所以 ROS 数据路径为:
ROS 回调
↓
SensorBridge
↓
CollatedTrajectoryBuilder不是:
ROS 回调
↓
LocalTrajectoryBuilder2DCartographer ROS 的 MapBuilderBridge 负责创建 trajectory,并把对应 trajectory builder 交给 SensorBridge 作为 ROS 传感器数据的输入目标。
十六、PointCloud2 如何进入 Cartographer
16.1 ROS 点云首先被转换
void SensorBridge::HandlePointCloud2Message(
const std::string& sensor_id,
const sensor_msgs::PointCloud2::ConstPtr& msg) {
PointCloudWithIntensities point_cloud;
common::Time time;
std::tie(point_cloud, time) =
ToPointCloudWithIntensities(*msg);
HandleRangefinder(
sensor_id,
time,
msg->header.frame_id,
point_cloud.points);
}这段代码主要做两件事。
第一,将 ROS PointCloud2 转成 Cartographer 内部点云格式。
第二,调用 HandleRangefinder(),准备进行 TF 变换并构造 TimedPointCloudData。
16.2 为什么点云中每个点都需要带时间
一帧 LiDAR 点云不是同一瞬间采集完成的。
例如 10 Hz 雷达,一圈扫描周期约为 0.1 秒。机器人在这 0.1 秒内可能前进、转弯或晃动。
因此,早采到的点与晚采到的点对应不同机器人姿态。
设整帧点云结束时刻为:
t_{\text{end}}第 iii 个点相对结束时刻的偏移为:
\Delta t_i \leq 0那么该点真实采样时刻为:
t_i
=
t_{\text{end}}
+
\Delta t_i其中:
- 最后一个采样点一般满足 Δti≈0\Delta t_i \approx 0Δti≈0;
- 早期点一般满足 Δti<0\Delta t_i < 0Δti<0;
- Local SLAM 后续会利用 tit_iti 查询或预测机器人当时的位姿;
- 这样才能把一帧扫描中的点变换到统一时刻,减少运动畸变。
这就是点云去畸变的时间基础。
16.3 SensorBridge 查询 TF 并变换点云
LiDAR 数据原本处于自身坐标系。
例如:
laser_link
velodyne
front_lidar_link
base_scan而 Cartographer Local SLAM 通常围绕 tracking_frame 工作。
例如:
base_link
imu_link
base_imu_link因此,SensorBridge 需要查询:
sensor frame → tracking frame核心逻辑如下:
const auto sensor_to_tracking =
tf_bridge_.LookupToTracking(
time,
CheckNoLeadingSlash(frame_id));
trajectory_builder_->AddSensorData(
sensor_id,
sensor::TimedPointCloudData{
time,
// 雷达原点转换到 tracking frame。
sensor_to_tracking->translation().cast<float>(),
// 全部点云转换到 tracking frame。
sensor::TransformTimedPointCloud(
ranges,
sensor_to_tracking->cast<float>())
});坐标变换可以表示为:
\mathbf{p}_{T}
=
\mathbf{T}_{T \leftarrow S}
\mathbf{p}_{S}其中:
- pS\mathbf{p}_{S}pS:激光点在雷达坐标系中的坐标;
- TT←S\mathbf{T}_{T \leftarrow S}TT←S:从雷达坐标系到 tracking frame 的刚体变换;
- pT\mathbf{p}_{T}pT:转换后的点在 tracking frame 中的坐标。
展开成旋转和平移形式:
\mathbf{p}_{T}
=
\mathbf{R}_{T \leftarrow S}
\mathbf{p}_{S}
+
\mathbf{t}_{T \leftarrow S}如果雷达到 tracking frame 的外参错误,例如雷达 yaw 写反、平移长度写错、TF 父子关系反了,那么后续扫描匹配即使正常运行,地图也会出现扭曲、双层墙、轨迹漂移或点云错位。
Cartographer ROS 的 SensorBridge 会将 ROS 点云转换为内部点云数据,并查询传感器坐标系到 tracking frame 的 TF 后再送入 trajectory builder。
十七、IMU 如何进入 Cartographer
IMU 通常提供:
三轴角速度
三轴线加速度
可选姿态四元数
协方差Cartographer 重点使用的是:
angular_velocity
linear_accelerationIMU 原始数据也必须先转换到 tracking frame。
sensor::ImuData{
time,
// 加速度旋转到 tracking frame。
sensor_to_tracking->rotation() *
ToEigen(msg->linear_acceleration),
// 角速度旋转到 tracking frame。
sensor_to_tracking->rotation() *
ToEigen(msg->angular_velocity)
}对于向量,只需要旋转,不需要平移。
\mathbf{a}_{T}
=
\mathbf{R}_{T \leftarrow I}
\mathbf{a}_{I}
\boldsymbol{\omega}_{T}
=
\mathbf{R}_{T \leftarrow I}
\boldsymbol{\omega}_{I}其中:
- aI\mathbf{a}_{I}aI:IMU 坐标系中的线加速度;
- ωI\boldsymbol{\omega}_{I}ωI:IMU 坐标系中的角速度;
- RT←I\mathbf{R}_{T \leftarrow I}RT←I:IMU 到 tracking frame 的旋转矩阵;
- aT\mathbf{a}{T}aT、ωT\boldsymbol{\omega}{T}ωT:转换到 tracking frame 后的数据。
17.1 IMU 进入 GlobalTrajectoryBuilder 后走两条路
void GlobalTrajectoryBuilder::AddSensorData(
const std::string& sensor_id,
const sensor::ImuData& imu_data) {
// Local SLAM:用于当前时刻位姿预测。
if (local_trajectory_builder_) {
local_trajectory_builder_->AddImuData(imu_data);
}
// PoseGraph:保存后端优化需要的 IMU 数据。
pose_graph_->AddImuData(
trajectory_id_,
imu_data);
}这段代码说明 IMU 同时服务于前端和后端。
送入 LocalTrajectoryBuilder2D:
用于 PoseExtrapolator。它帮助预测当前激光帧到来时机器人可能的姿态,尤其是 yaw、roll、pitch 等旋转状态。
送入 PoseGraph2D:
用于后端保存 IMU 相关数据,后续全局优化会综合激光局部约束、回环约束、里程计、GPS 与 IMU 信息。
因此,IMU 不是只服务于去畸变,也不是只服务于后端,而是同时影响前端预测与后端约束。
十八、Odom 如何进入 Cartographer
轮速里程计或外部里程计通常使用 ROS 消息:
nav_msgs::Odometry它通常表达:
机器人 child_frame 在 odom frame 下的位姿例如:
odom → base_link但 Cartographer 的 tracking frame 不一定是 base_link,也可能是 imu_link。
因此,SensorBridge 需要将 Odom 转换成:
tracking_frame 在 odom frame 下的位姿
sensor::OdometryData{
time,
ToRigid3d(msg->pose.pose) *
sensor_to_tracking->inverse()
}可表示为:
\mathbf{T}_{O \leftarrow T}
=
\mathbf{T}_{O \leftarrow B}
\mathbf{T}_{B \leftarrow T}其中:
- OOO:odom frame;
- BBB:base_link;
- TTT:tracking frame;
- TO←T\mathbf{T}_{O \leftarrow T}TO←T:tracking frame 在 odom 坐标系下的位姿。
18.1 Odom 同样会分两路
void GlobalTrajectoryBuilder::AddSensorData(
const std::string& sensor_id,
const sensor::OdometryData& odometry_data) {
// 前端:辅助短时间位姿预测。
if (local_trajectory_builder_) {
local_trajectory_builder_->AddOdometryData(
odometry_data);
}
// 后端:保存 Odom 约束。
pose_graph_->AddOdometryData(
trajectory_id_,
odometry_data);
}Odom 对 Local SLAM 的作用是提供较稳定的短时间运动先验。
例如机器人从上一帧到当前帧大约移动了 0.2 米、旋转了 3 度,Odom 可以给扫描匹配提供一个初始猜测。
但 Odom 不会直接覆盖 Cartographer 位姿。
更准确的关系是:
Odom:提供预测初值
↓
LiDAR 扫描匹配:修正局部位姿
↓
PoseGraph 回环优化:修正全局位姿因此,最终 Cartographer 轨迹一般不是纯 Odom 轨迹,也不是纯 LiDAR 轨迹,而是多种约束融合后的结果。
十九、RangeDataCollator:多颗 LiDAR 的同步器
这里必须把 RangeDataCollator 与 CollatedTrajectoryBuilder 区分开。
CollatedTrajectoryBuilder 处理的是不同传感器类型:
LiDAR
IMU
Odom
GPS
Landmark它解决的问题是:
不同类型传感器的消息应该按什么时间顺序进入系统。而 RangeDataCollator 处理的是多个 LiDAR:
front_lidar
rear_lidar
left_lidar
right_lidar它解决的问题是:
多颗 LiDAR 的点云如何融合成一批时间一致的 range data。二者关系如下:
CollatedTrajectoryBuilder:
系统级时间排序
↓
GlobalTrajectoryBuilder
↓
LocalTrajectoryBuilder2D
↓
RangeDataCollator:
多 LiDAR 点云同步、裁剪、合并19.1 RangeDataCollator 的入口
auto synchronized_data =
range_data_collator_.AddRangeData(
sensor_id,
unsynchronized_data);
if (synchronized_data.ranges.empty()) {
return nullptr;
}假设机器人有两颗雷达:
front_lidar
rear_lidar当前先收到:
front_lidar:10.000 s后方雷达对应数据还没到时,系统可能无法形成完整同步范围,因此返回空。
等收到:
rear_lidar:10.005 s之后,RangeDataCollator 才会根据两颗雷达的时间信息,取出一个共同的处理窗口,并将两颗雷达在该时间范围内的点融合。
19.2 多雷达时间窗口
设当前融合时间窗口为:
I_k
=
\left(
t_{\text{start}},
t_{\text{end}}
\right]只有点采样时刻满足:
t_{\text{start}}
<
t_i
\leq
t_{\text{end}}的点才会保留。
其中每个点真实采样时刻为:
t_i
=
t_{\text{cloud}}
+
\Delta t_i这里:
- tcloudt_{\text{cloud}}tcloud:当前点云结束时刻;
- Δti\Delta t_iΔti:点相对结束时间;
- tit_iti:点真实采样时刻。
随后,来自不同雷达的点会被合并,并统一到相同时间参考下。
因此,RangeDataCollator 输出的并不是"前雷达一帧点云"或"后雷达一帧点云",而是一批融合后的、时间一致的 range data。
二十、从 PointCloud2 到 PoseGraph Node 的完整追踪
下面以一帧 /points_raw 为例,将完整过程串起来。
1. ROS 收到 sensor_msgs::PointCloud2
↓
2. SensorBridge::HandlePointCloud2Message()
↓
3. PointCloud2 转为 PointCloudWithIntensities
↓
4. 查询 sensor frame → tracking frame 的 TF
↓
5. 构造 TimedPointCloudData
↓
6. trajectory_builder_->AddSensorData(...)
↓
7. CollatedTrajectoryBuilder 接收数据
↓
8. Collator / TrajectoryCollator 时间排序
↓
9. HandleCollatedSensorData(...)
↓
10. GlobalTrajectoryBuilder::AddSensorData(...)
↓
11. LocalTrajectoryBuilder2D::AddRangeData(...)
↓
12. RangeDataCollator 多雷达同步与融合
↓
13. PoseExtrapolator 位姿预测
↓
14. 点云去畸变、滤波
↓
15. 实时扫描匹配
↓
16. ActiveSubmaps2D 插入
↓
17. MatchingResult
↓
18. InsertionResult
↓
19. PoseGraph2D::AddNode(...)
↓
20. 创建 Node 与 Submap 局部约束这条调用链是后续分析 Cartographer 所有模块的基础。
后续第 2 篇会从第 11 步开始,重点分析:
LocalTrajectoryBuilder2D
↓
PoseExtrapolator
↓
RangeDataCollator
↓
实时扫描匹配
↓
局部位姿输出二十一、总结
Cartographer 的系统入口并不是单一函数,也不是"订阅到一帧激光后立刻进行扫描匹配"这样简单的过程。它实际上是一条层次明确、职责分离的数据处理链。只有先理解这条链,后续阅读 LocalTrajectoryBuilder、Submap、ConstraintBuilder、PoseGraph 和 OptimizationProblem 时,才不会把不同模块的职责混在一起。
整个系统最上层的核心对象是 MapBuilder。MapBuilder 可以理解为 Cartographer 的总装配器。它本身不负责处理一帧激光,也不直接执行扫描匹配或回环检测,而是根据配置创建整个 SLAM 系统所需的公共对象。对于 2D 模式,MapBuilder 会创建 PoseGraph2D、OptimizationProblem2D、后台线程池以及传感器时间排序器。PoseGraph2D 是后端管理器,它保存 Node、Submap、局部约束、回环约束,并在合适时机触发全局优化。OptimizationProblem2D 则是更底层的优化问题组织器,它负责把 Node 位姿、Submap 位姿、各种 Constraint 转换为可交给 Ceres 求解器处理的优化变量和残差项。线程池的存在说明 Cartographer 前端与后端并不是完全串行的关系:前端 Local SLAM 尽量实时运行,而回环检测、约束构建和全局优化通常放在后台异步执行。
当系统需要开始一段建图、定位或 rosbag 回放任务时,会创建一条 trajectory。trajectory 并不只是 RViz 中显示的一条路径线,而是一整套连续运行的 SLAM 任务状态。每条 trajectory 都有自己的 LocalTrajectoryBuilder2D、自己的 IMU 与 Odom 缓存、自己的 PoseExtrapolator、自己的 ActiveSubmaps2D 和自己的 Node 序列。不同 trajectory 可以代表不同机器人、不同建图阶段,或者不同 rosbag 数据段。尽管它们的 Local SLAM 状态独立,但多条 trajectory 可以共享一个 PoseGraph2D,因此后端可以通过约束将不同 trajectory 对齐到统一全局地图中。
MapBuilder 的 AddTrajectoryBuilder() 是创建一条 trajectory 的核心函数。这个函数首先创建 LocalTrajectoryBuilder2D。LocalTrajectoryBuilder2D 是 Cartographer 的 Local SLAM 前端,负责实时位姿预测、点云去畸变、点云滤波、实时扫描匹配和局部 Submap 更新。之后,系统创建 GlobalTrajectoryBuilder。GlobalTrajectoryBuilder 并不是 Global SLAM 后端,而是前端与后端之间的连接器。它负责将 LiDAR 数据送入 LocalTrajectoryBuilder2D,同时把 IMU 和 Odom 同时送给 Local SLAM 与 PoseGraph;当 Local SLAM 处理完当前帧并插入 Submap 后,它又会调用 PoseGraph2D::AddNode(),将当前帧正式加入后端图优化系统。
但系统对外真正暴露的对象并不是 LocalTrajectoryBuilder2D,也不是 GlobalTrajectoryBuilder,而是 CollatedTrajectoryBuilder。这个设计非常重要。真实机器人上的 LiDAR、IMU、Odom 不会严格同步到达,ROS 通信、驱动延迟和回调调度都可能造成消息先后顺序不一致。如果 LiDAR 一到就直接执行扫描匹配,而相关时刻的 IMU 或 Odom 尚未进入系统,那么 PoseExtrapolator 就可能缺少足够数据,导致预测位姿不可靠,进而影响扫描匹配初值。因此,Cartographer 在最外层使用 CollatedTrajectoryBuilder,对不同类型传感器数据进行缓存和时间排序。它会将数据交给 Collator 或 TrajectoryCollator,在确认不会出现明显早到或晚到的数据插队后,再将消息转发给内部的 GlobalTrajectoryBuilder。
这也是为什么配置中声明某个传感器后,必须保证该传感器 Topic 真正稳定发布。如果配置里存在 IMU,但 IMU Topic 没有数据,或者时间戳不递增,那么 Collator 可能会一直等待,导致看起来 LiDAR 已经发布但地图不更新。很多 Cartographer"卡住"的问题,根源并不一定是扫描匹配,而可能是时间排序器正在等待 expected sensor。工程调试时,应该同时检查 LiDAR、IMU、Odom 的频率、时间戳、TF、Topic 名和传感器配置,而不能只盯着激光数据。
ROS 数据进入 Cartographer Core 前,还需要经过 SensorBridge。SensorBridge 是 ROS 消息与 Cartographer 内部数据结构之间的转换器。对于 PointCloud2 或 LaserScan,SensorBridge 会先转换为 Cartographer 内部点云格式,再查询传感器坐标系到 tracking frame 的 TF,将点云变换到统一坐标系,最后构造 TimedPointCloudData。TimedPointCloudData 不仅包含点云坐标,还包含每个点的相对采样时间。这一点非常关键,因为 LiDAR 一帧扫描往往持续几十毫秒甚至上百毫秒,机器人在扫描期间可能已经发生平移和旋转。如果不知道每个点真实采样时刻,就无法准确估计每个点对应的机器人姿态,也难以完成有效的点云去畸变。
IMU 与 Odom 的处理也遵循类似思路。IMU 中的线加速度和角速度需要转换到 tracking frame,之后会同时进入 LocalTrajectoryBuilder2D 和 PoseGraph2D。Local SLAM 使用 IMU 来帮助 PoseExtrapolator 预测当前激光帧的姿态和运动趋势;PoseGraph 则保存 IMU 数据,为后续全局优化提供约束。Odom 也是如此:前端利用 Odom 给扫描匹配提供运动初值,后端则把它作为外部运动约束之一。需要明确的是,IMU 和 Odom 都不会直接覆盖 Cartographer 的最终位姿。Local SLAM 的最终局部位姿仍由扫描匹配修正,而全局位姿还会在回环检测和 PoseGraph 优化之后发生调整。
此外,Cartographer 中还有一个容易与 CollatedTrajectoryBuilder 混淆的模块:RangeDataCollator。二者名称相近,但处理层级完全不同。CollatedTrajectoryBuilder 负责 LiDAR、IMU、Odom、GPS、Landmark 等不同类型传感器之间的时间排序;RangeDataCollator 则只处理多颗 LiDAR 的点云融合。例如机器人同时安装前向雷达和后向雷达时,两个雷达消息到达时间可能略有不同,RangeDataCollator 会在 LocalTrajectoryBuilder2D 内部缓存它们、按共同时间窗口裁剪点、统一相对时间并合并为一批同步 range data。之后,这一批融合点云才会进入去畸变、扫描匹配和 Submap 插入流程。
最后,还必须理解 Node 的生成机制。并不是每帧 LiDAR 都会生成一个 PoseGraph Node。每一批有效 range data 经 LocalTrajectoryBuilder2D 处理后,可能产生 MatchingResult;MatchingResult 表示当前批次点云已经得到局部位姿估计。但若机器人移动很小、旋转很小,或者当前帧被 MotionFilter 判断为信息增量不足,那么这一帧不会插入 ActiveSubmaps2D,也不会产生 InsertionResult。只有当前帧真正插入 Submap 时,GlobalTrajectoryBuilder 才会调用 PoseGraph2D::AddNode(),将该帧变成后端图优化中的 Node,并与当前 Submap 建立局部约束。
因此,Cartographer 的完整入口可以概括为:MapBuilder 创建 SLAM 系统;MapBuilderBridge 管理 ROS 与 Core 的关系;SensorBridge 负责 ROS 消息转换与 TF 变换;CollatedTrajectoryBuilder 负责多传感器时间排序;GlobalTrajectoryBuilder 负责连接 Local SLAM 与 PoseGraph;LocalTrajectoryBuilder2D 负责实时定位和局部建图;PoseGraph2D 负责保存 Node、Submap、局部约束、回环约束并进行全局优化。只要明确当前函数属于哪一层,处理的是传感器数据、局部位姿、Submap、Node 还是全局约束,Cartographer 的源码结构就会清晰很多。