做过腿足机器人强化学习的朋友应该都清楚,这件事的入门门槛有多高------底层算法要自己写,训练细节要自己调,光是把环境跑通就能耗掉大半精力。为突破对应瓶颈,由 ZZS 开发、基于 Isaac Gym 构建的 Legged Gym 仿真框架提供了极具价值的解决方案。
Legged Gym 的核心思路是把 PPO 这类主流 RL 算法全部封装进去,开发者不用碰底层代码,专注写奖励函数就行。更关键的是,它不是只支持一种机器人,而是把七种代表性控制任务统一进了同一套工作流------从经典的二阶倒立摆,到 A1、Anymal 系列四足机器狗,再到 Cassie、PF2 这类双足机器人,一条命令启动,跨设备对比算法方便很多。
可以说,Legged Gym 不仅仅是一个代码工具箱,它更像是一个让强化学习回归「策略设计」本身的基础设施。它极大降低了腿足机器人智能控制的入门门槛,让研究人员能够更纯粹地去验证自己的控制灵感。本教程将基于 OpenBayes 平台,逐步熟悉这一框架,激活 7 种仿真环境,直观感受机器人在算法驱动下从笨拙走向灵动的全过程。
教程链接:https://go.openbayes.com/QbiKo
使用平台:OpenBayes
http://openbayes.com/console/signup?r=sony_0m6v
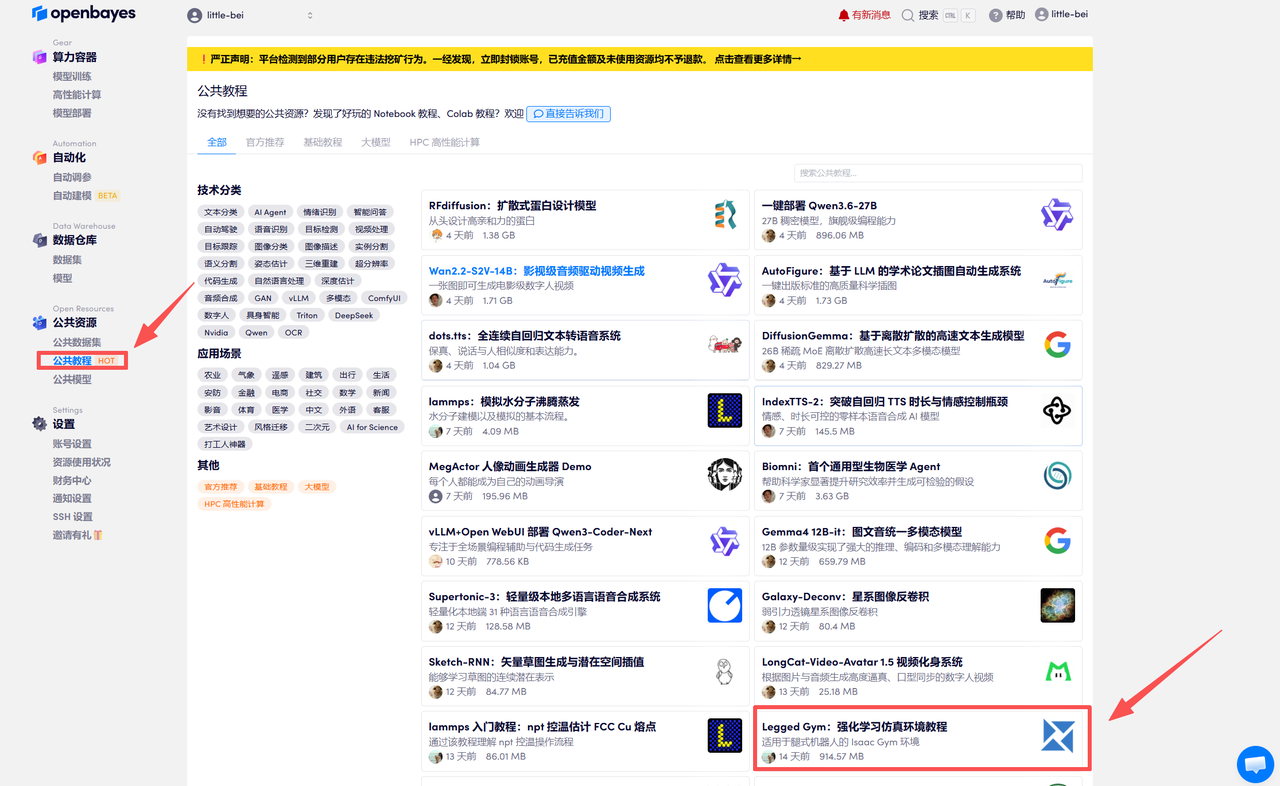
首先点击「公共教程」,找到「Legged Gym:强化学习仿真环境教程」,单击打开。
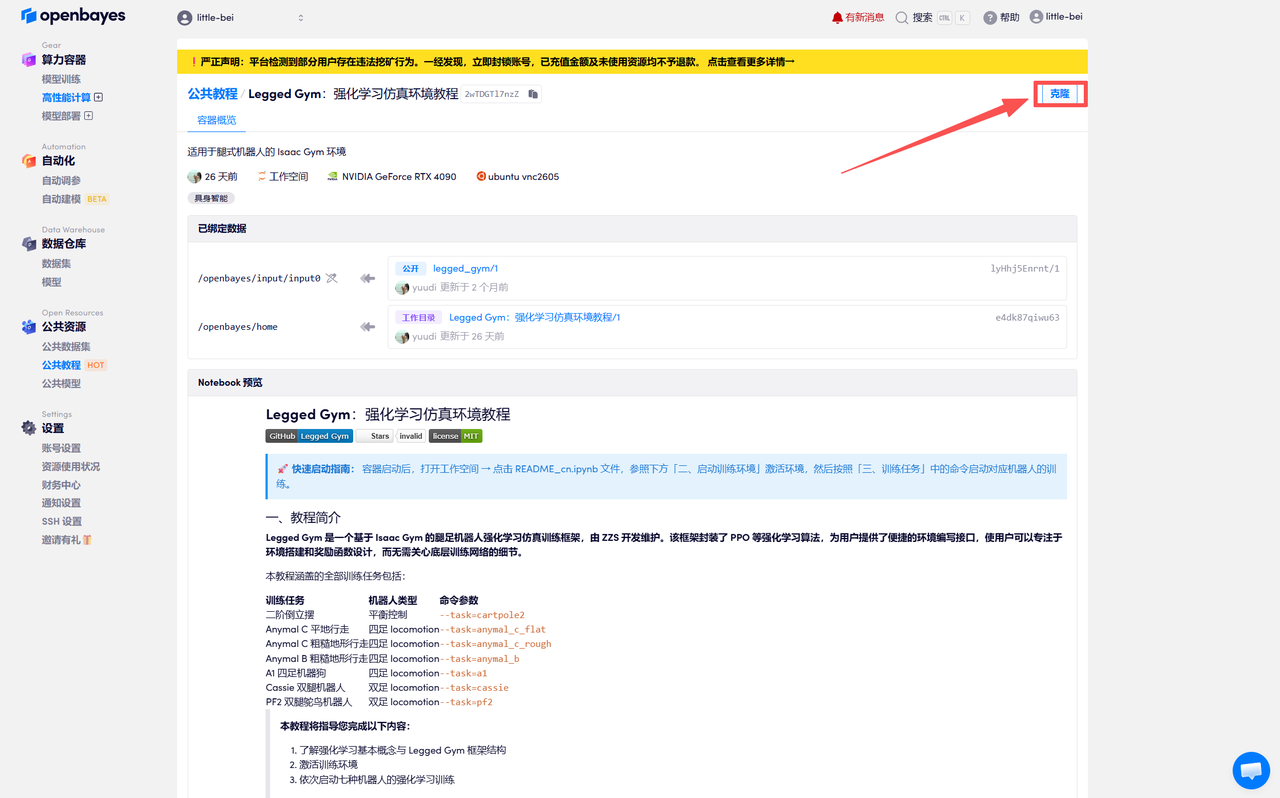
页面跳转后,点击右上角「克隆」,将该教程克隆至自己的容器中。
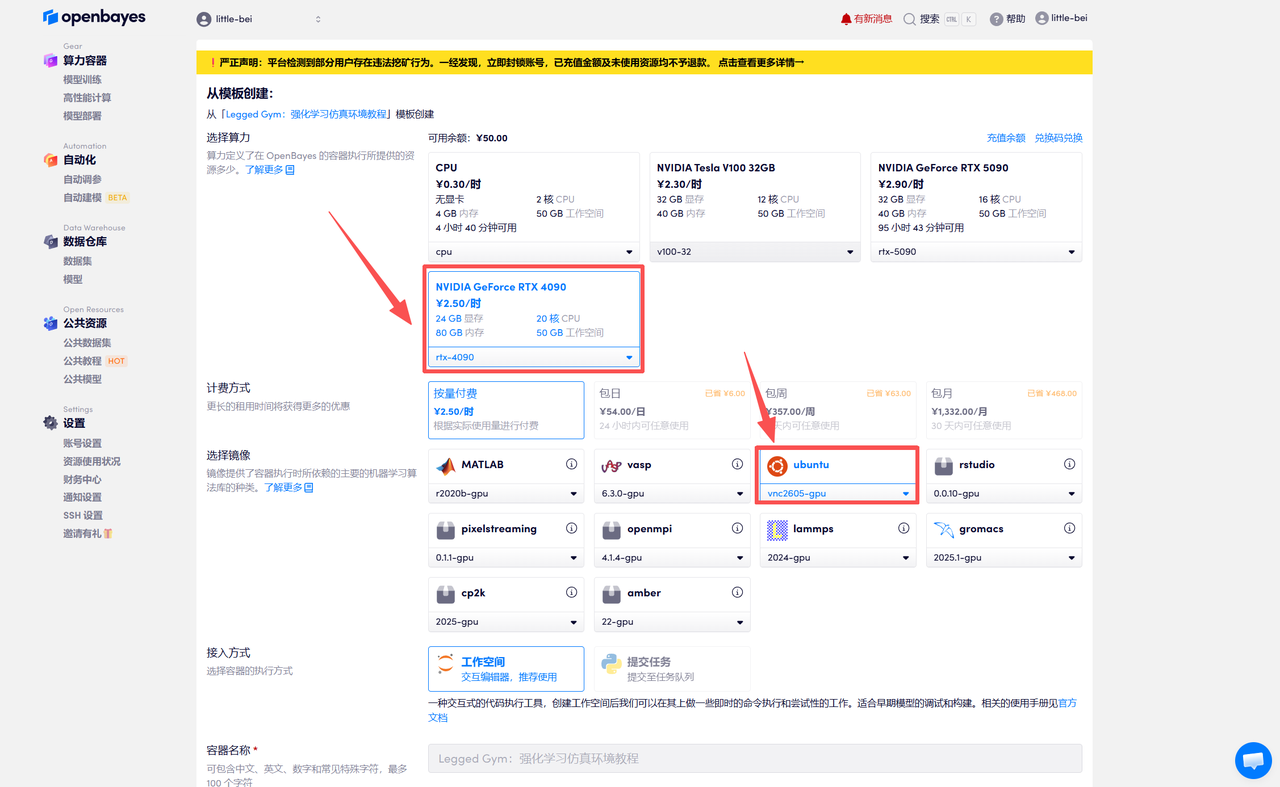
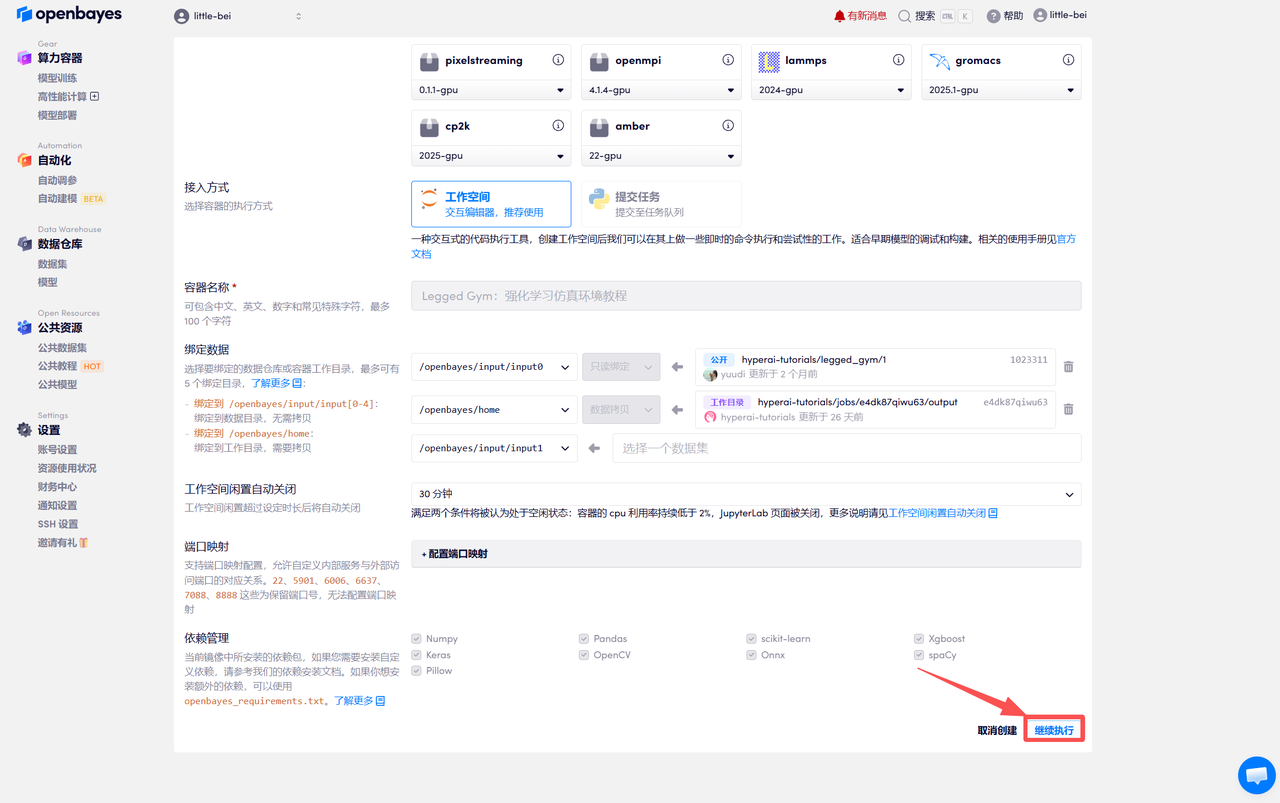
在当前页面中看到的算力资源均可以在平台一键选择使用。平台会默认选配好原教程所使用的算力资源、镜像版本,不需要再进行手动选择。点击「继续执行」,等待分配资源。
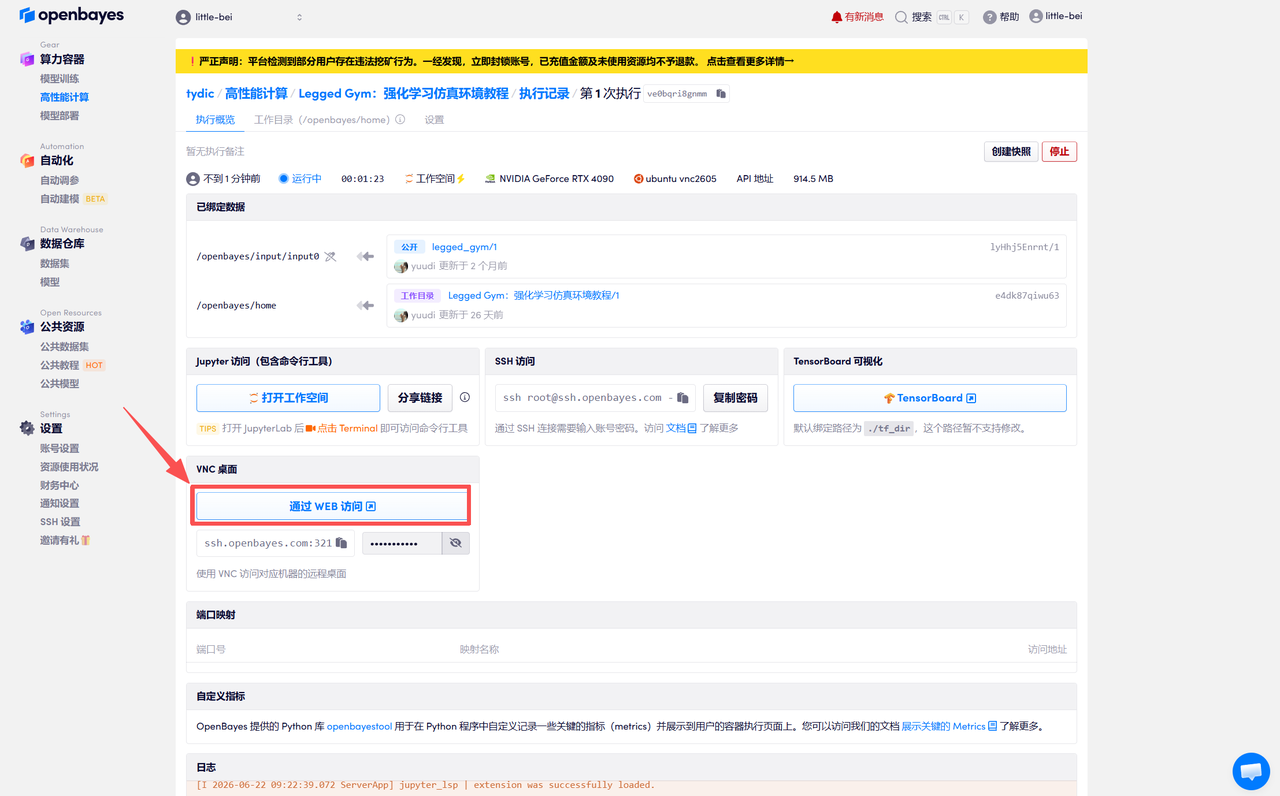
数据和代码都已经同步完成了。容器状态显示为「运行中」后,点击「通过 WEB 访问」,即可进入 VNC 工作空间。
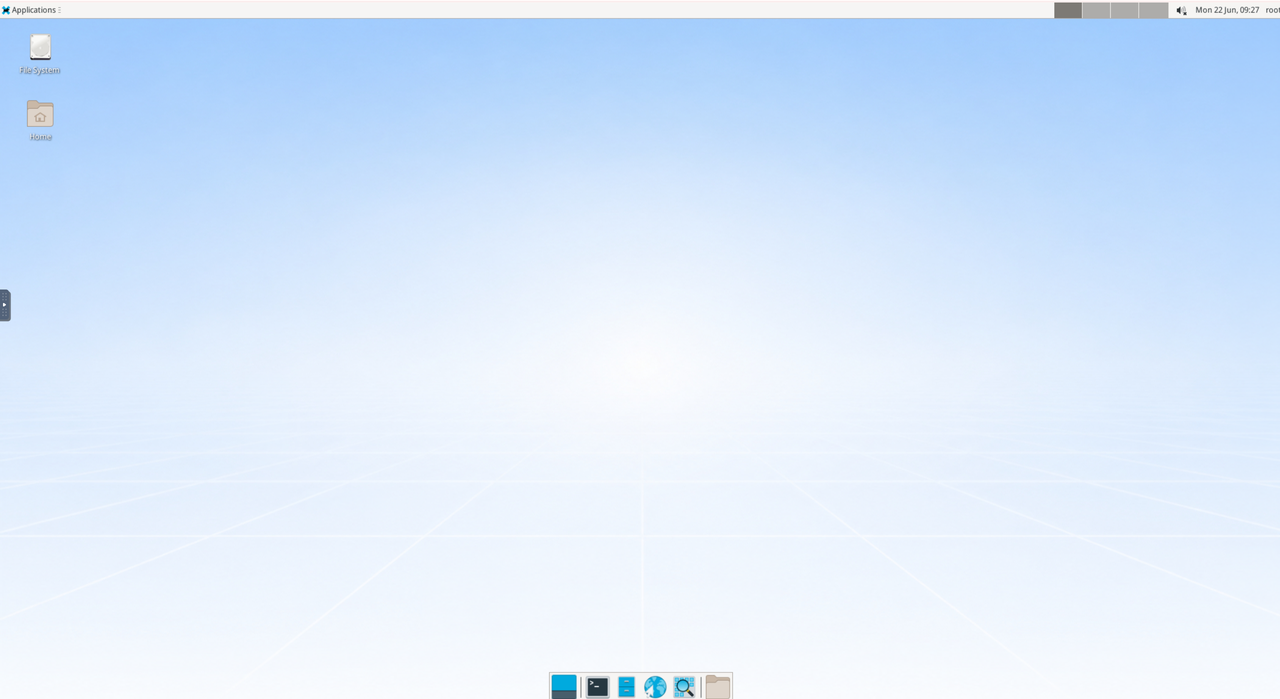
训练前需要先激活已配置好的 Conda 环境。本容器已经完成环境安装,新建终端后直接执行以下命令即可
# 激活 Legged Gym 虚拟环境
source activate /input0/legged_gym_env
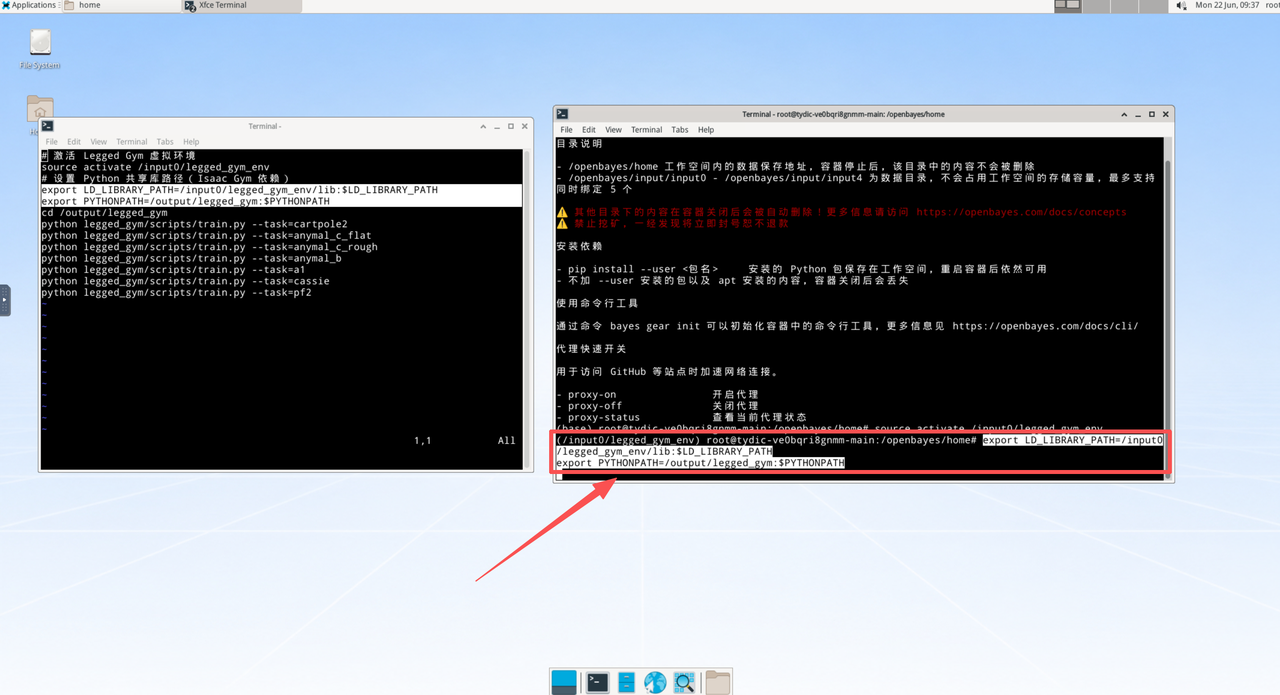
# 设置 Python 共享库路径(Isaac Gym 依赖)
export LD_LIBRARY_PATH=/input0/legged_gym_env/lib:$LD_LIBRARY_PATH
cd /output/legged_gym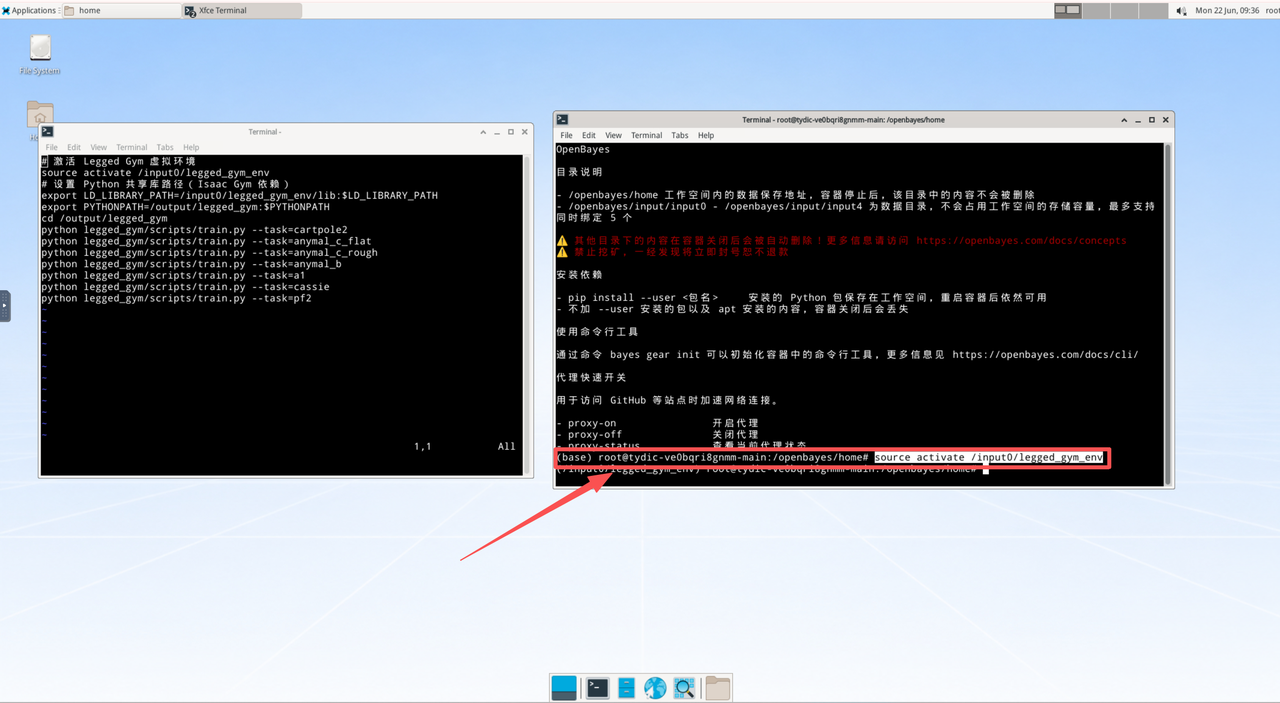
启动七种机器人训练任务
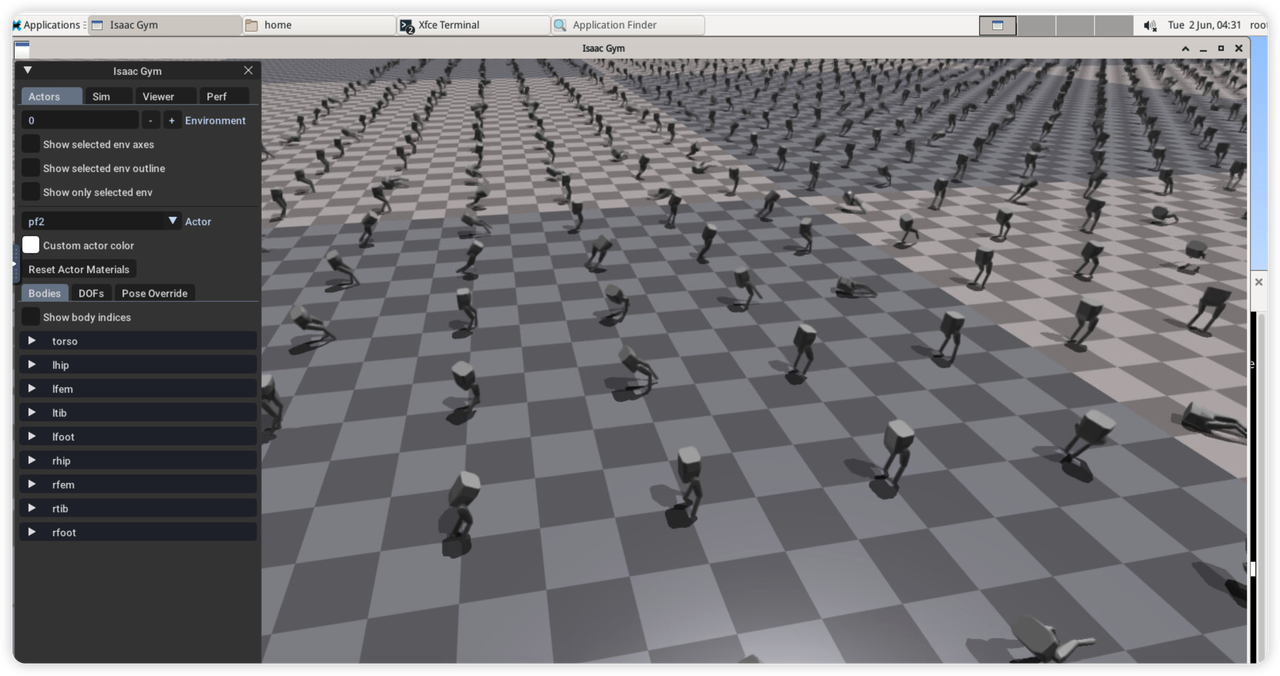
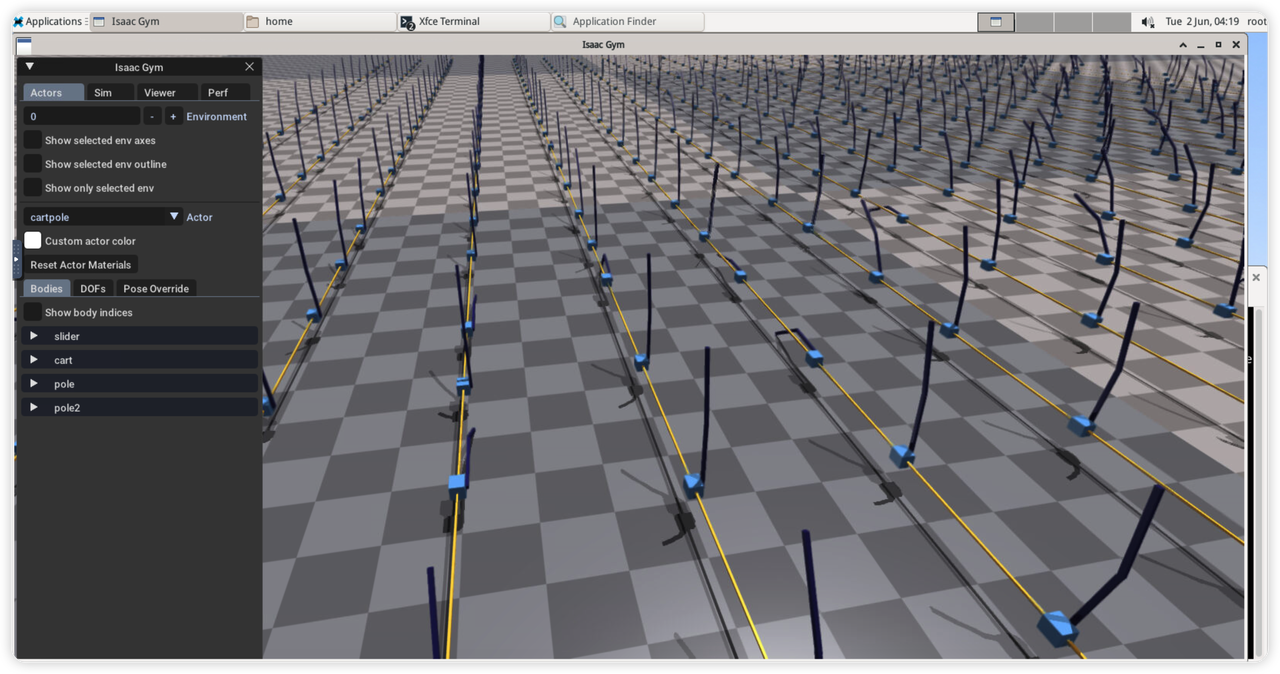
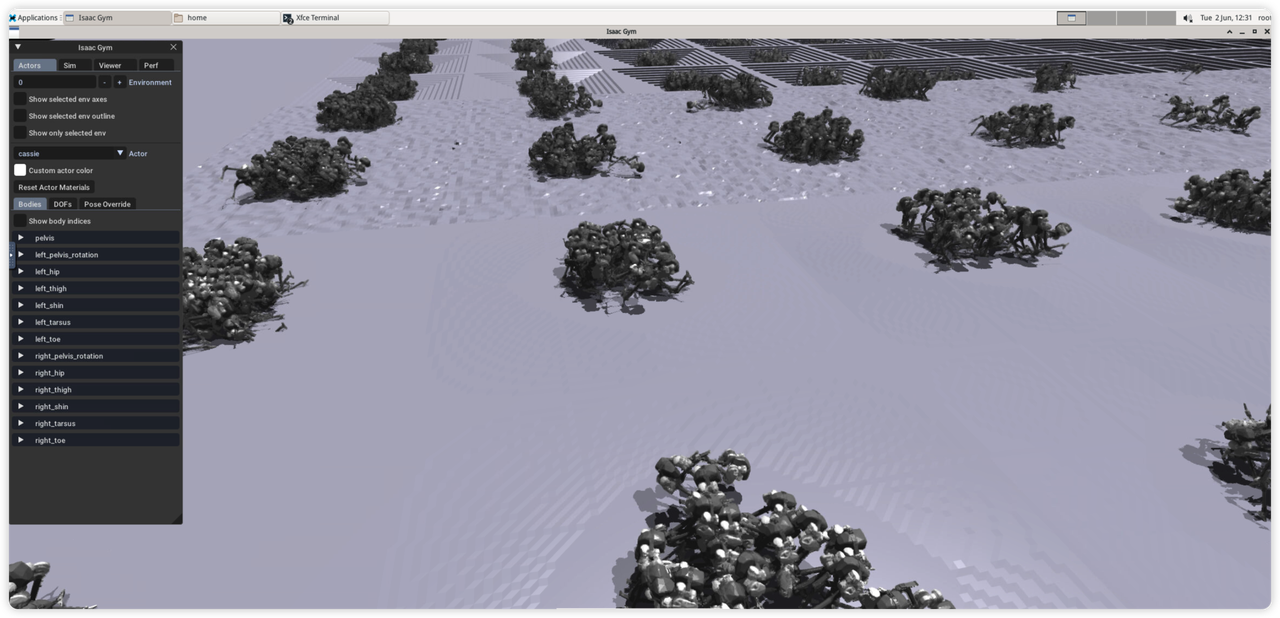
环境配置完成后,即可依次启动不同机器人的训练命令。每次命令执行后,Isaac Gym 会自动弹出渲染窗口。在窗口中,可使用 W、S、A、D 键结合 Shift、Space 键移动视角,按住鼠标右键拖动以旋转视角。
提示:训练过程将持续运行直到手动停止或达到最大迭代次数。如需切换至 CPU 运行,可在对应命令后追加 --sim_device=cpu 参数。
1. 二阶倒立摆(CartPole2)
作为强化学习入门的经典环境,观测空间包含各个关节角的速度和位置(6 维向量)。奖励函数旨在鼓励关节角速度最小化并使关节角尽量接近竖直状态。
python legged_gym/scripts/train.py --task=cartpole2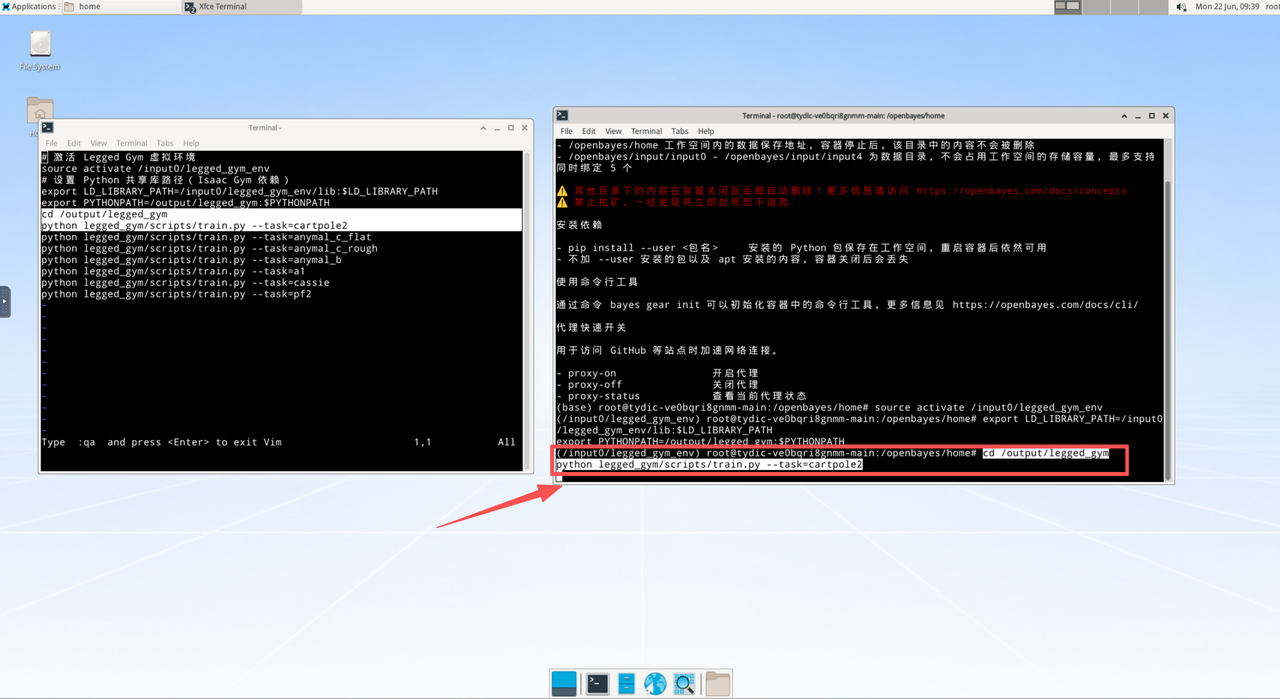
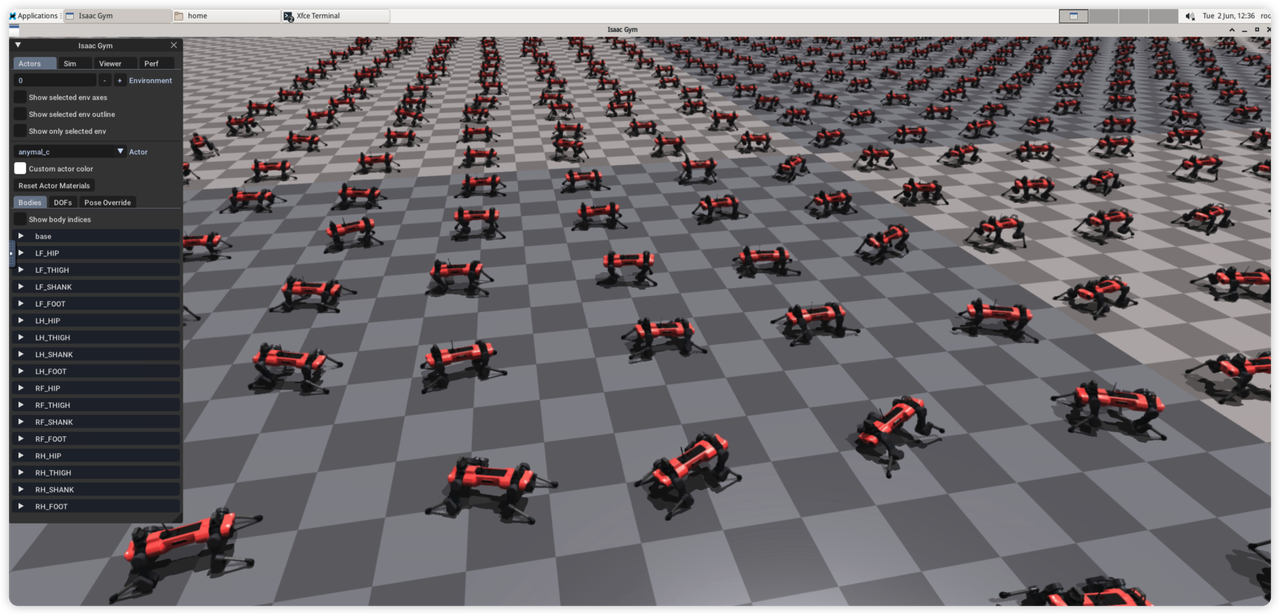
- Anymal C 平地行走(anymal_c_flat)
Legged Gym 默认的训练环境,针对 ANYbotics 开发的四足机器人,主要训练平地地形上的行走策略。
python legged_gym/scripts/train.py --task=anymal_c_flat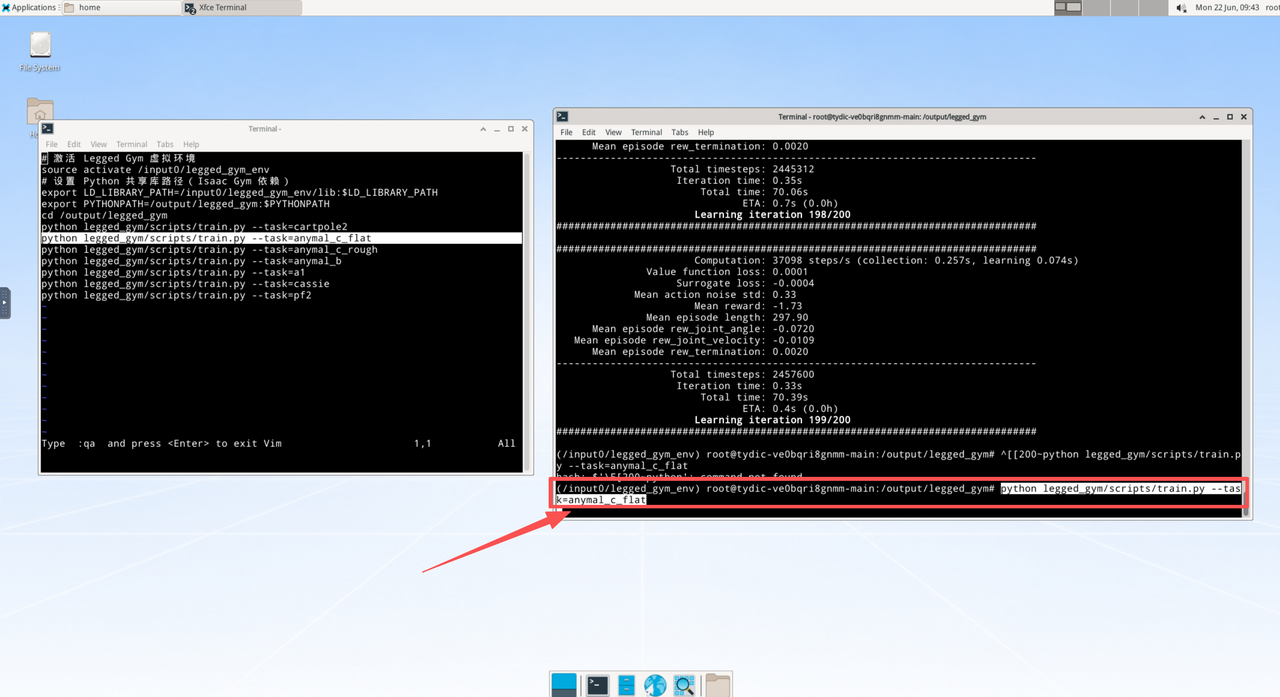
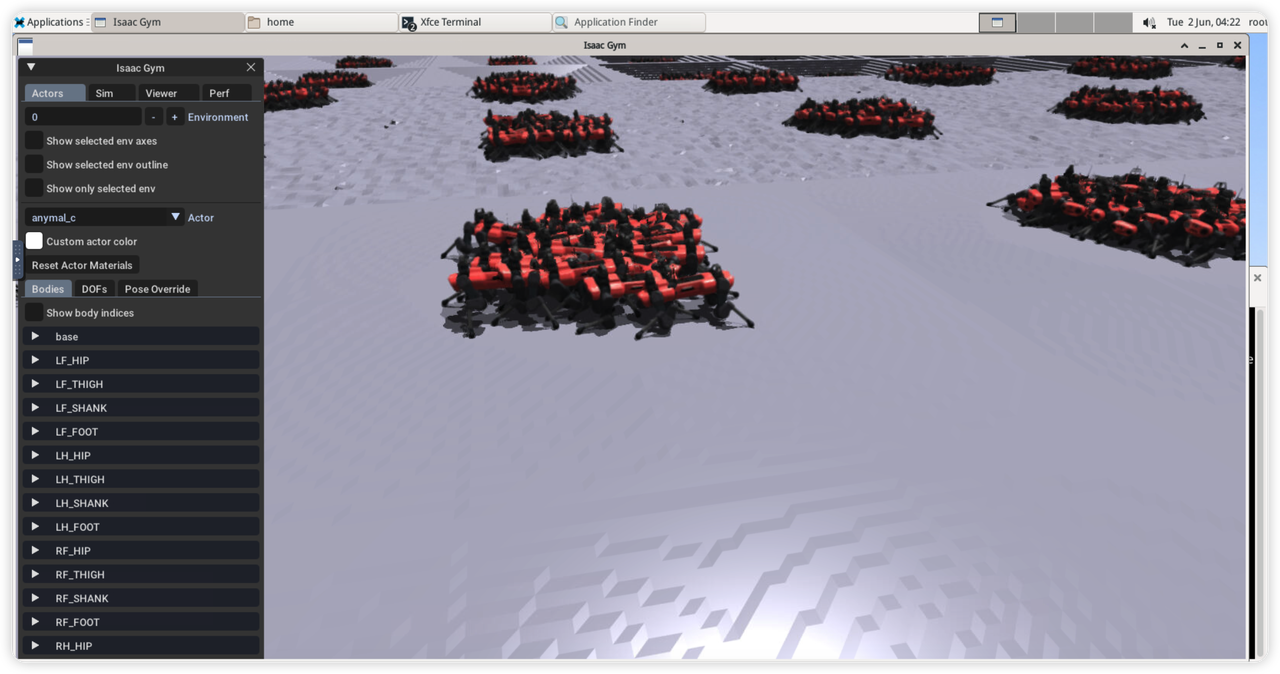
- Anymal C 粗糙地形行走(anymal_c_rough)
引入上坡、下坡、台阶等多种地形障碍的混合粗糙地形环境。相较于平地任务,需要进一步训练机器人自适应不同复杂地形的能力。
python legged_gym/scripts/train.py --task=anymal_c_rough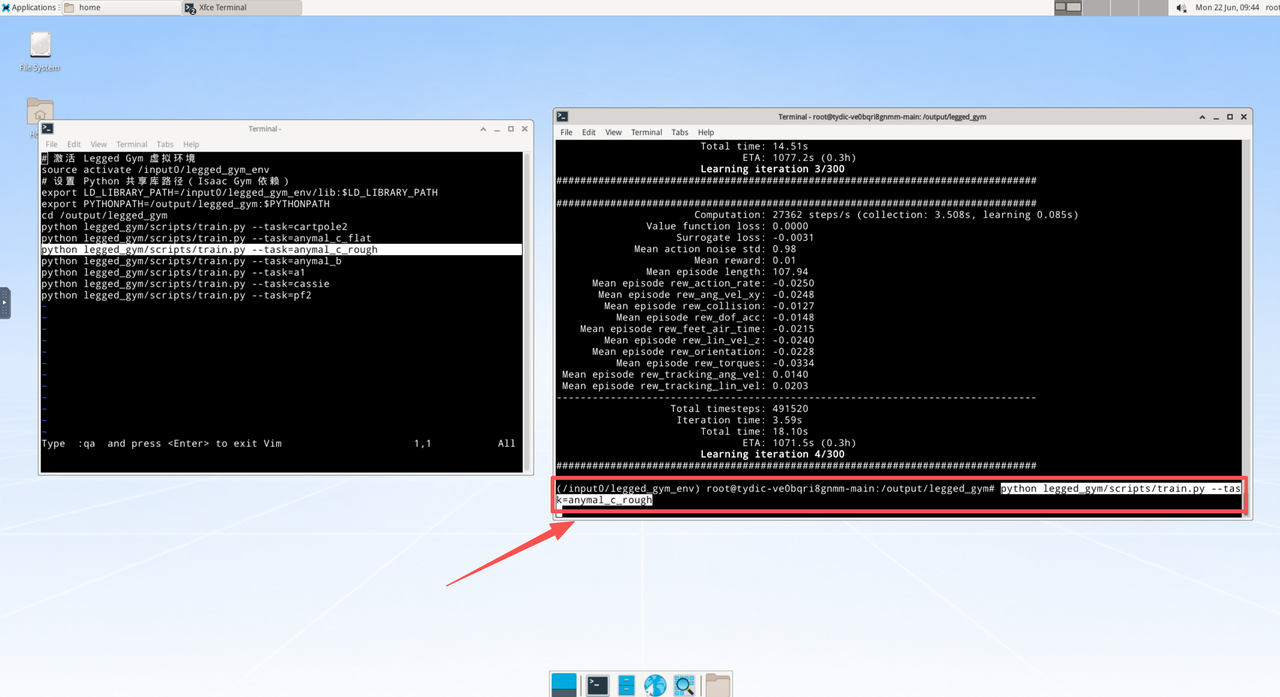
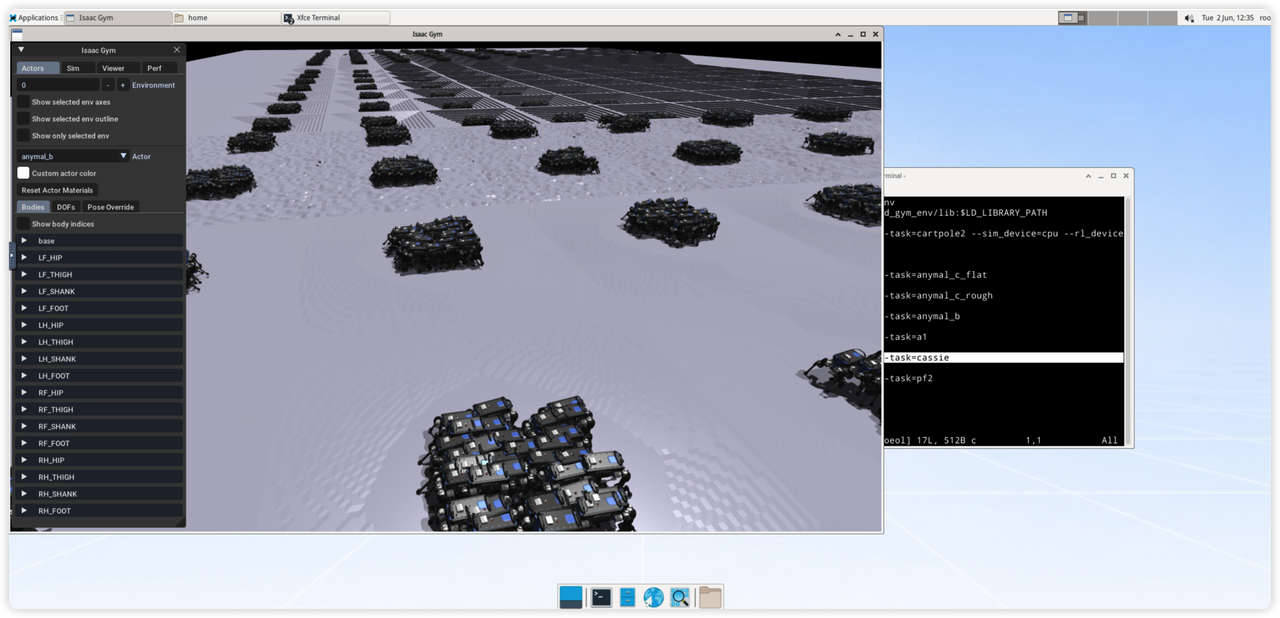
- Anymal B 粗糙地形行走(anymal_b)
针对 ANYbotics 上一代四足机器人的训练任务。因硬件配置和动力学参数有所不同,需要专门在粗糙地形上进行步态训练。
python legged_gym/scripts/train.py --task=anymal_b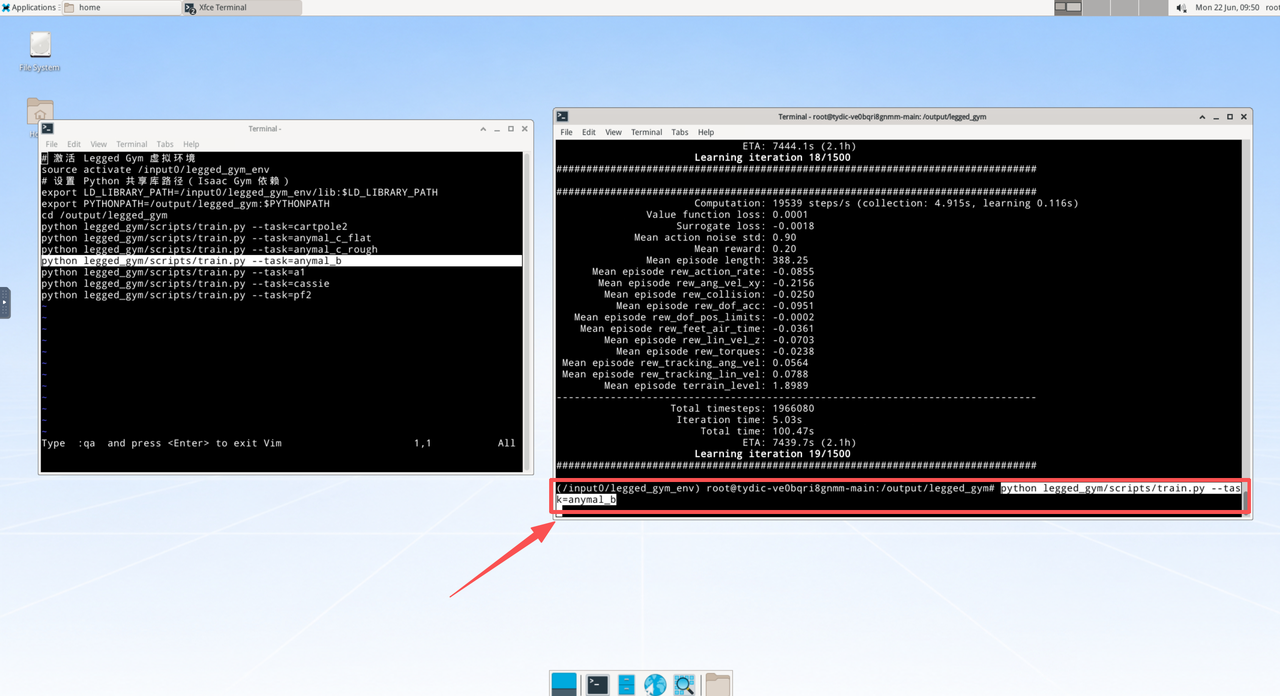
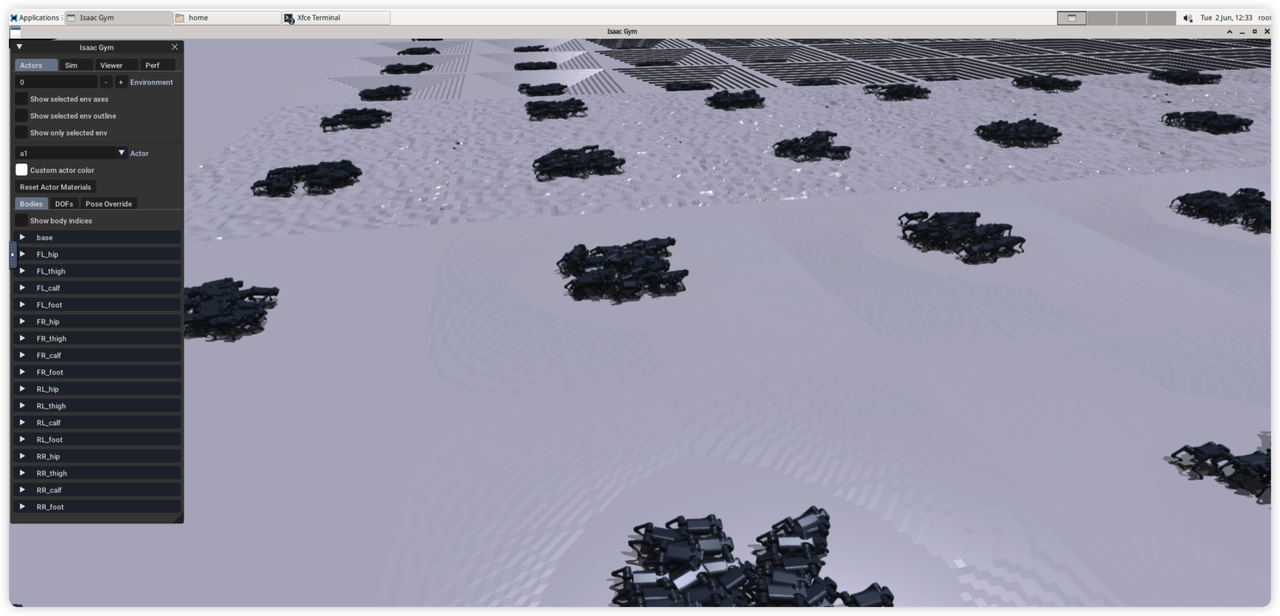
- A1 四足机器狗(a1)
训练对象为宇树科技(Unitree)开发的小型四足机器人,在仿真环境中学习并优化运动控制策略。
python legged_gym/scripts/train.py --task=a1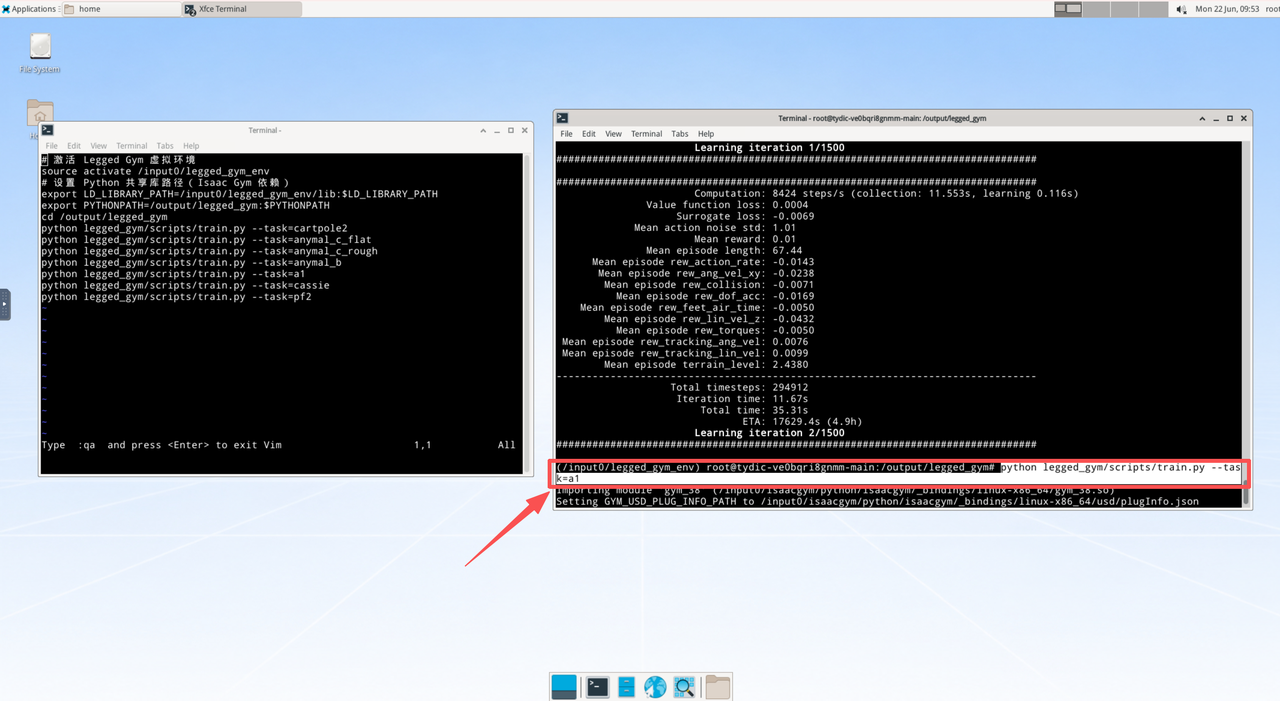
6. Cassie 双腿机器人(cassie)
具身智能领域中双足 locomotion 的经典研究平台。针对 Agility Robotics 开发的复杂腿部关节结构,训练双足机器人在仿真环境中实现稳定行走。
python legged_gym/scripts/train.py --task=cassie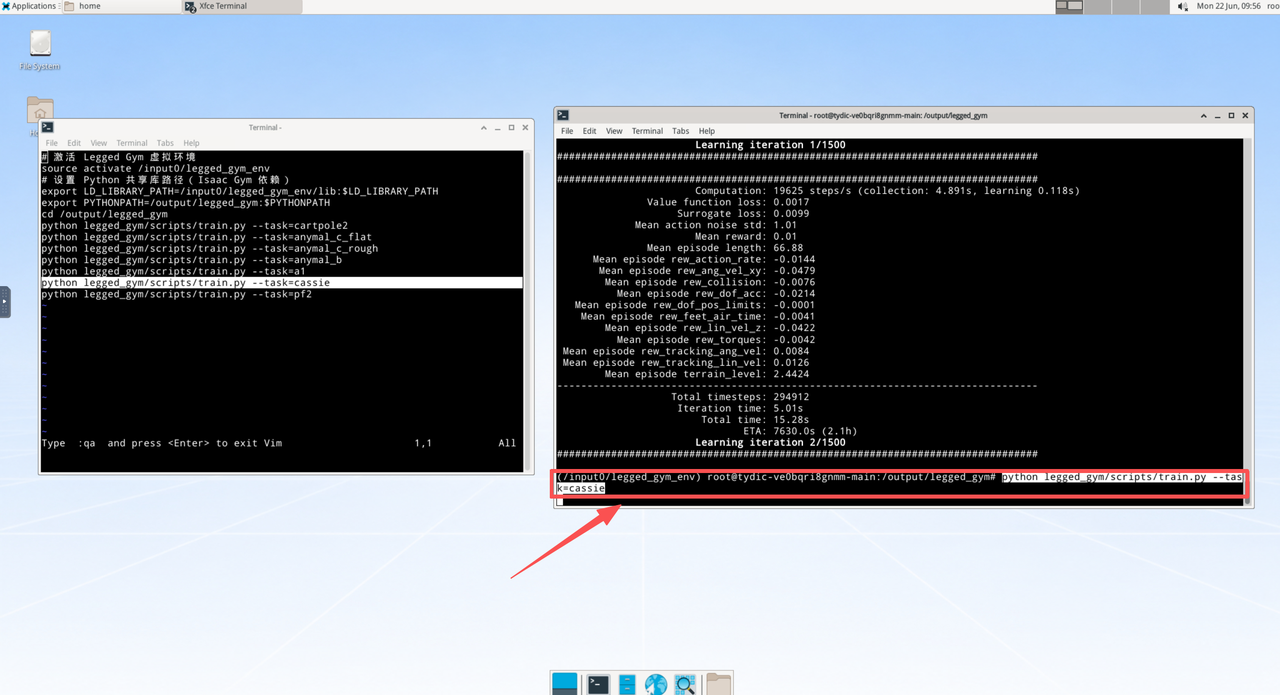
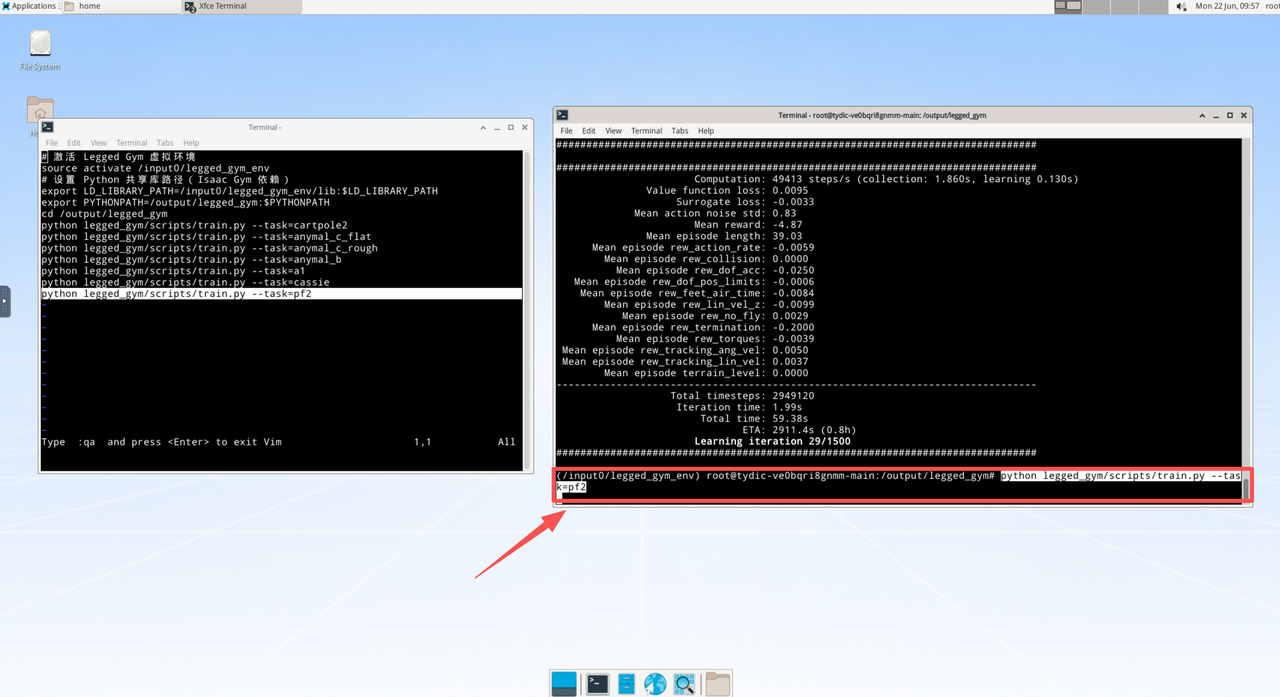
- PF2 双腿鸵鸟机器人(pf2)
采用独特腿部结构设计的仿鸵鸟双足机器人,专注训练在仿真环境中实现快速奔跑与稳定运动的控制算法。
python legged_gym/scripts/train.py --task=pf2