本文探讨了智能汽车毫米波雷达技术在eVTOL飞行器上的应用转型挑战。车载4D成像雷达擅长地面障碍物识别,但直接移植到航空领域面临三维空间感知重构难题。文章重点分析了三个核心差异:1)空间包线需从水平扫描转向垂直大俯仰探测;2)感知机理需从静态点云识别升级为气象粒子动态分析;3)必须解决地面效应引发的尘暴致盲问题。通过对比汽车与航空雷达的技术矩阵,指出必须保留汽车雷达的硬件优势,但需重构底层算法以满足航空级气象探测和绝对高度测量的严苛要求。最终强调,eVTOL感知系统的关键在于融合汽车雷达芯片的高集成度与航空级控制律的确定性,特别是在垂直降落阶段实现毫米波对尘暴的穿透能力。
在智能汽车的传感器图谱中,车载毫米波雷达(77GHz/79GHz)与近年大火的 4D 成像雷达 扮演着不可或缺的"全天候守护者"角色。车企工程师习惯了利用 4D 雷达密集点云所带来的高度解算能力,去识别地面的静止障碍物(如路边护栏、井盖、桥洞),并在功能安全(ISO 26262)体系下,与前视相机进行数据级的深度融合(Deep Fusion),以攻克自动驾驶中的长尾工况。
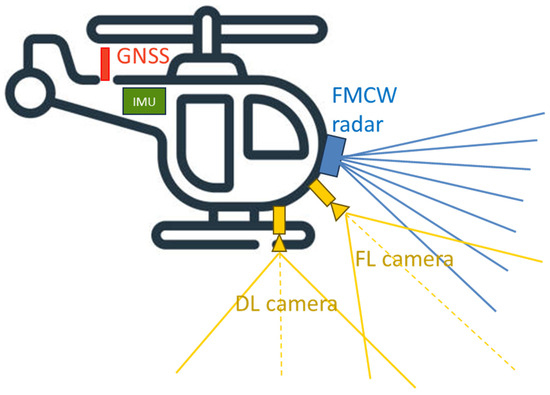
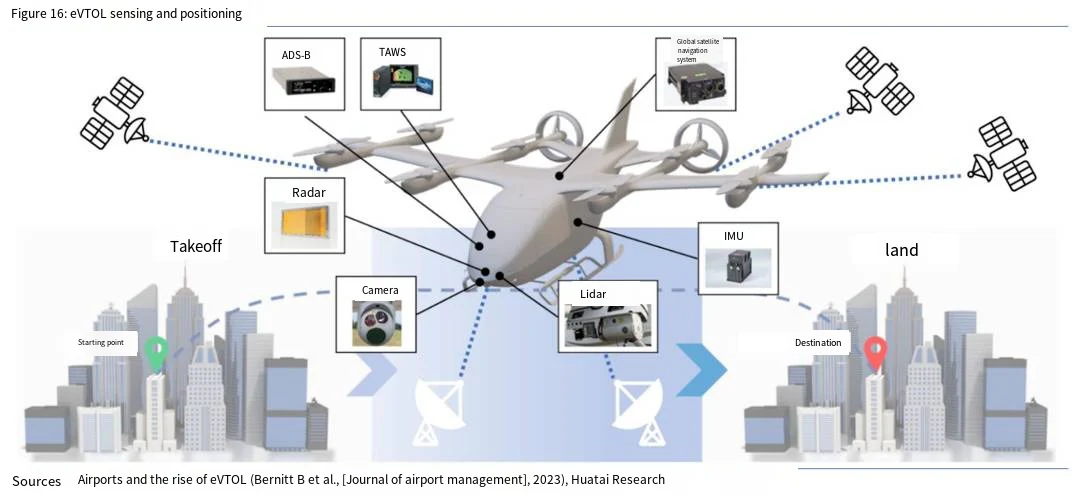
然而,当这套汽车行业引以为傲的低成本、高算力雷达芯片试图直接平移至 eVTOL 的感知系统时,空间的几何剖面与气象环境将发生根本性的异变。在低空城市空中交通(UAM)的运行剖面下,载具面临的不再是二维路面上的"车辆与行人",而是三维空域中的微下击暴流(Microburst)、突发切变风场、悬浮障碍物(风筝、无人机),以及垂直降落阶段转子扰动引发的近地面地面效应(Ground Effect)尘暴。
将汽车的"前视成像/4D毫米波雷达"技术,向航空级 "无线电高度计(RADALT)" 与 "机载前视气象雷达(WXR)" 进行跨界融合与升维映射,是第 10 章要攻克的首要硬核核心。
第三篇:技术映射------智能汽车系统在 eVTOL 上的重构
第 10 章:从自动驾驶到自主飞行(传感器与环境感知)
10.1 汽车毫米波/4D 雷达与气象/高度计雷达的融合
汽车毫米波雷达的核心追求是"对低反射率金属/地表障碍物的水平方位角与纵向距离的横向高分辨率";而航空感知总纲则要求雷达具备"对宏观气象粒子动力学特征的穿透性探测(测雨雪风暴)"与"低空垂直维度绝对距离的确定性零抖动解算(防撞地)"。
1. 物理层与射频重构:从"水平窄包线"向"垂直大俯仰与体制重构"升维
-
空间包线(FoV)的几何错位:
汽车 4D 成像雷达为了防范横向插车,其天线阵列设计(MIMO 架构)通常呈现"横向宽、纵向窄"的特征(例如水平 FoV \\pm 60\^\\circ,垂直 FoV 仅 \\pm 15\^\\circ)。
但在 eVTOL 垂直起降(VTOL)与俯仰倾转转换(Transition)阶段,载具的运动矢量在三维空间内高频剧烈变动。
-
无线电高度计(Radio Altimeter)的确定性映射:
在下降和悬停段,全机最核心的DAL A级安全指标是飞机离地面的真实绝对高度。汽车雷达如果直接向下看,其高频调频连续波(FMCW)在面对杂乱的城市灌木、斜坡或积水地面时,会因为多径效应引发严重的高度跳变。
- 航空级升维 :必须将汽车 4D 雷达的部分射频通道重构为符合 ARINC 707 标准的无线电高度计体制(通常工作在 4.2GHz ~ 4.4GHz 航空专用频段,或利用 77GHz 进行窄束高增益下视改造)。采用纯正的相位差测距算法,天线FoV重新调整为正圆锥形(垂直各向同性 \\pm 30\^\\circ),确保飞机在 \\pm 45\^\\circ 大坡度姿态盘旋时,下视测高数据依然毫秒不差、绝对连续。
2. 感知机理的跨界跨越:从"硬质多点云"向"气象多普勒(Doppler)粒子穿透"
汽车 4D 雷达通过解析目标的反射能量强弱,利用恒虚警率(CFAR)算法将目标抽象为一个个坚硬的物理点云。但在高空飞行中,雷达最大的敌人是无形的水分子丛林(降雨、结冰云团)。
-
机载前视气象雷达(WXR)的底层融合:
eVTOL 必须具备低空局地气象自我诊断能力。我们将前端汽车 4D 雷达芯片的高算力硬件执行器(如多核 DSP、硬件级 FFT 加速器)保留,但必须彻底替换底层的信号处理控制律算法:
-
气象多普勒处理(Doppler Weather Processing) :算法不再寻找离散的"点",而是将整个前方空域切分成成千上万个微小的"距离-方位门(Range-Azimuth Gates)"。雷达波穿透云层,收集千百个密集雨滴反射回来的极其微弱的多普勒频移杂讯。
-
微下击暴流与风切变(Wind Shear)早期预警 :基于电磁波在水汽粒子中的散射机理(Mie Scattering),算法实时计算前方风场中雨滴的径向速度方差。一旦发现某一区域的雨滴一侧疯狂飞向飞机(正频移)、另一侧疯狂背离飞机(负频移),算法会在毫秒级识别出隐藏在低空的杀手------微下击暴流(Microburst)。
-
适航动作联锁:雷达在软件控制律层面瞬间越过座舱 HMI 渲染,通过时间触发以太网(TTEthernet)直接触发第 9.2 节所述的三电系统"超载控制律(OEI / Go-Around Mode)",强行全功率复飞,在飞机被垂直气流拍向地面之前完成物理闭环。
-
3. 物理层终极考验:地面效应引发的"尘暴致盲"与盲飞保底
在垂直降落的最后 10 米,分布式多旋翼(DEP)下洗流产生的巨大气流会猛烈撞击地面,在非硬化地表(如草地、沙地、野外临时停机坪)引发狂暴的地面效应尘暴(Brownout Condition)。
-
视觉与激光雷达的物理死刑:
在这最后 10 米,智能汽车最依赖的前视相机、双目视觉以及高精密激光雷达(LiDAR),会被漫天飞舞的沙尘、落叶和强颗粒物瞬时彻底致盲(光子散射饱和)。此时,整架飞机的闭环控制完全变成了"睁眼瞎"。
-
4D成像雷达的毫米波物理加固盾牌:
由于 77GHz/79GHz 毫米波的波长(约 4mm)远大于沙尘颗粒的特征尺寸,雷达波表现出极强的瑞利散射免疫性(Rayleigh Scattering Immunity),能够毫发无损地穿透浓烈的尘暴舱室。
- 虚警清洗控制律:此时,4D 成像雷达与高度计雷达启动"近地面对冲算法",利用高密度的 4D 点云在沙尘暴内部逆向勾勒出地面三维地形的绝对刚性轮廓,并实时结算出飞机起落架距离下方物理障碍物的绝对距离和三维漂移速度(横向漂移、纵向滑移)。雷达化身为最后的数字盲降守门人,护送飞机安全触地。
技术特性深度对照矩阵
将汽车毫米波雷达与航空机载雷达的底层特征对比总结如下:
| 技术与审定维度 | 智能汽车 4D 成像雷达(车规范式) | eVTOL 航空气象/高度计雷达(适航范式) | 跨界进化关键落脚点 |
|---|---|---|---|
| 空间包线(FoV)拓扑 | 水平宽(\\pm 60\^\\circ)、垂直窄(\\pm 15\^\\circ)。侧重二维路面二维截面扫描。 | 垂直下视各向同性大俯仰(\\pm 30\^\\circ圆锥),或前视大扫描俯仰包线。 | 重构 MIMO 天线阵列排布,将地面水平分辨力平移回填至高空垂直/俯仰分辨率。 |
| 核心算法机理 | 恒虚警(CFAR)离散点云提取。以识别刚性边界和静态障碍物为终点。 | 高频多普勒频移谱分析。侧重气象散射粒子微观速度场(风切变)的数学建模。 | 保留汽车DSP硬件算力底座,重写底层解调逻辑,将"点云定位"升维为"场流动测速"。 |
| 全天候抗噪能力 | 满足常规雨雪、雾霾下的前视测距,无法穿透强沙尘爆盲区。 | 死锁瑞利散射定律。具备 100% 穿透低空地面效应尘暴(Brownout)物理本领。 | 替代视觉与激光雷达(LiDAR),作为垂直降落最后10米物理触地的绝对主控。 |
| 系统安全性主权 | ASIL B 级辅助感知。失效时允许直接关闭,退出由人类驾驶员接管。 | 高度计功能锁死为 ARP4754A DAL A 等级。气象防撞功能绑定为 DAL B。 | 所有雷达数据链路和控制律代码需跑满 100% MC/DC 目标码验证,严防时序突变抖动。 |
| 设备接口规范 | 汽车常规以太网或 CAN-FD 总线。SOME/IP 动态路由。 | 完全遵循 ARINC 707(高度计)与 ARINC 708(气象雷达)总线控制律。 | 数据转换器平移至 7.2 节所述的 TTEthernet 静态时间槽网络内,确保无抖动时延传输。 |
结论:
"智能汽车的 4D 成像雷达是一台'盯着平面战场的瞭望镜',它用密集的点云解构了地面的护栏与障碍。然而当感知的维度向高空立体蔓延,二维空间的经验在低空微下击暴流和地面效应尘暴面前将瞬间沦为'物理盲区'。从自动驾驶向自主飞行的跃升,是一场关于'穿透无形风险与锁定绝对高度'的传感器灵魂重塑。车企跨界团队必须克制住将汽车点云网络照搬上天的冲动。利用汽车大工业沉淀的 77GHz 高集成度 RF 芯片作为物理血肉,但必须在其内部注入多普勒粒子流场计算与 ARINC 707 确定性测高的航空航行控制律。在垂直降落、视线被尘暴彻底致盲的最后十米绝境中,用不容置疑的毫米波穿透力撑起整架飞机的数字飞行甲板,这才是智能载具环境感知的终极宿命。"