高速路面多隐患航拍标注数据集|无人机道路积水裂缝垃圾AI巡检训练图像资料
标签
#高速无人机巡检 #路面积水识别 #道路裂缝检测 #路面垃圾识别 #智慧高速运维 #YOLO训练素材 #航拍路况图像 #道路内涝监测 #沥青路面病害 #交通AI视觉 #路面泥堆识别 #道路安全隐患自动化排查
国内高速路网总里程突破17.7万公里,全面进入常态化养护周期,路面裂缝、坑洼、积水内涝、路边垃圾、泥堆泥泞均属于高风险交通隐患。雨季路面内涝会大幅降低轮胎抓地力,极易引发连环车祸;细微发丝裂缝长期渗水会造成路基空洞,单次大修成本是日常灌缝养护的8倍;路边散落垃圾、堆积泥堆会遮挡标识、诱发车辆避让事故。
传统人工高速巡检存在五大核心痛点:1. 高速车流大,上路巡查人员交通事故风险极高;2. 百公里路段人工排查需要2~3天,巡检效率极低;3. 逆光、积水反光、树荫遮挡场景下人眼漏检率超22%,发丝细微裂缝很难识别;4. 人工记录病害无统一量化标准,养护派单优先级划分全凭经验;5. 企业自研AI巡检系统缺少覆盖积水、泥泞、垃圾、多类裂缝的综合标注素材,自行采集标注周期长、人力成本高昂。
无人机低空航拍搭配YOLO目标检测算法,可一次性完成数十公里高速全域扫描,同步识别结构病害与环境安全隐患。本文配套标准化YOLO格式高速多隐患航拍标注素材,完整覆盖路面破损、积水内涝、杂物堆积十大类别,配套图像预处理、数据集分层划分、模型训练、航拍批量推理完整工程代码,可快速搭建高速自动化巡检、隐患分级处置平台。

一、图像素材工程整体概述
1.1 项目定位
面向高速公路无人机俯视航拍巡检场景,适配YOLO全系列检测框架的路面综合隐患标注图像素材,用于各类裂缝、坑洼、松散剥落、积水内涝、泥堆泥泞、路边杂物识别算法研发、高速智能运维平台开发、机载轻量化视觉模型迭代优化。
1.2 核心量化指标
- 高速实拍航拍图像总量:1300张,统一低空俯视视角,分辨率覆盖1600×1200、1920×1080两类工业航拍相机规格;
- 全量标注隐患目标框总数:6240个路面隐患标注,单张图像平均4.8处缺陷/环境异常目标;
- 数据集分层划分:训练集1040张(80%)、验证集260张(20%),分层抽样保证10类样本均衡分布,无单类别样本倾斜;
- 标注标准:原生YOLO txt归一化xywh坐标标签,无需格式转换,直接兼容YOLOv5/v8/v10/v11全系列模型;
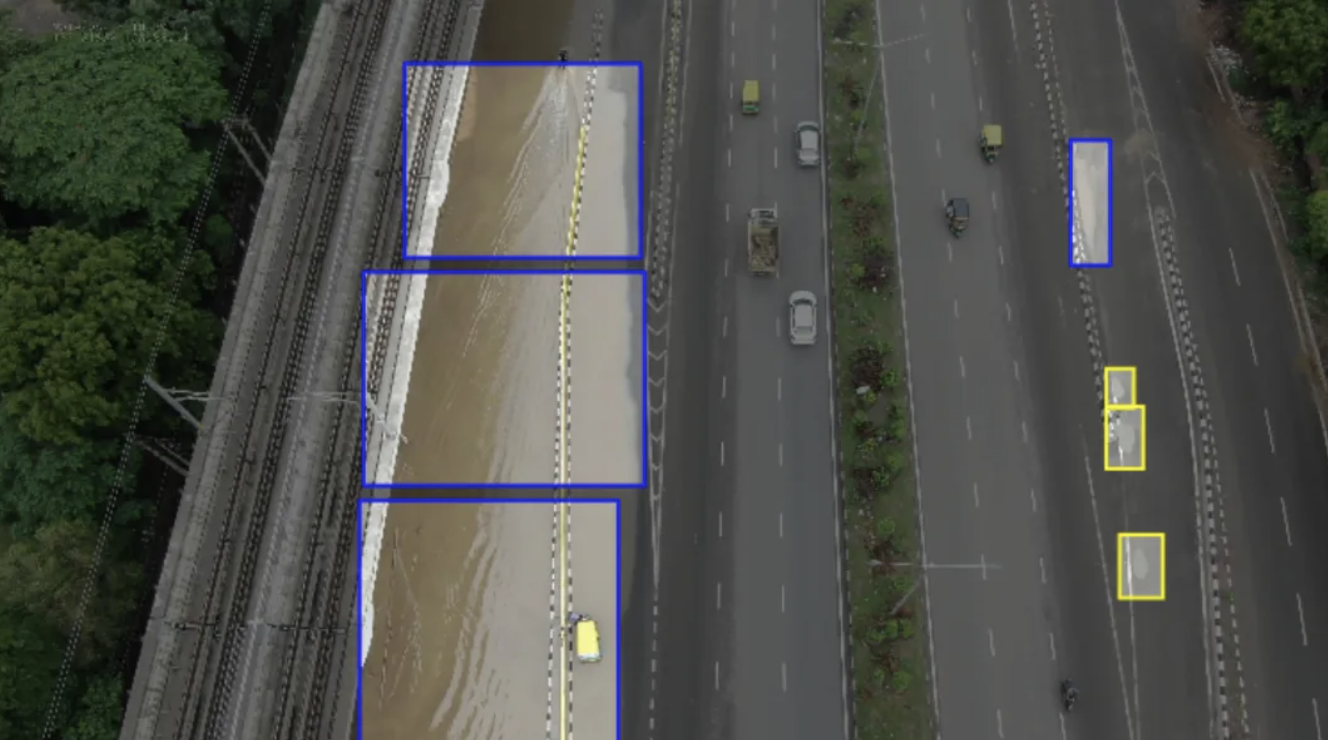
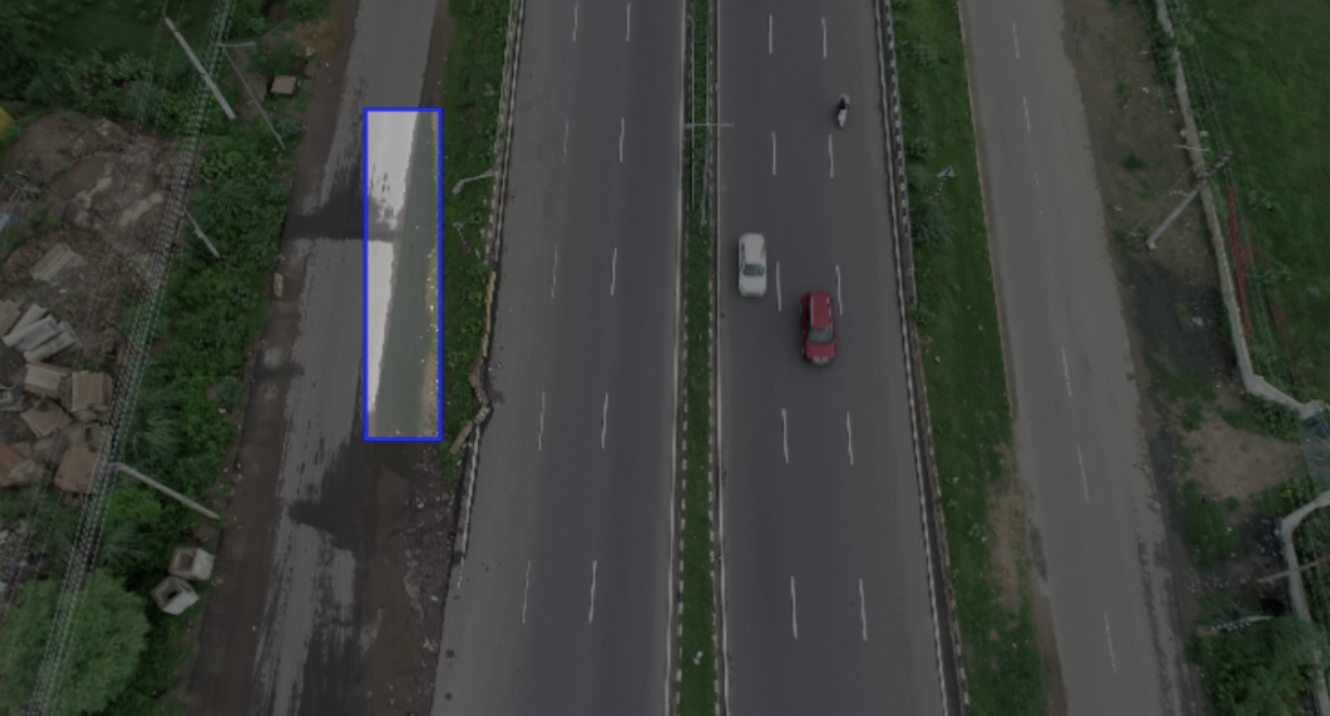
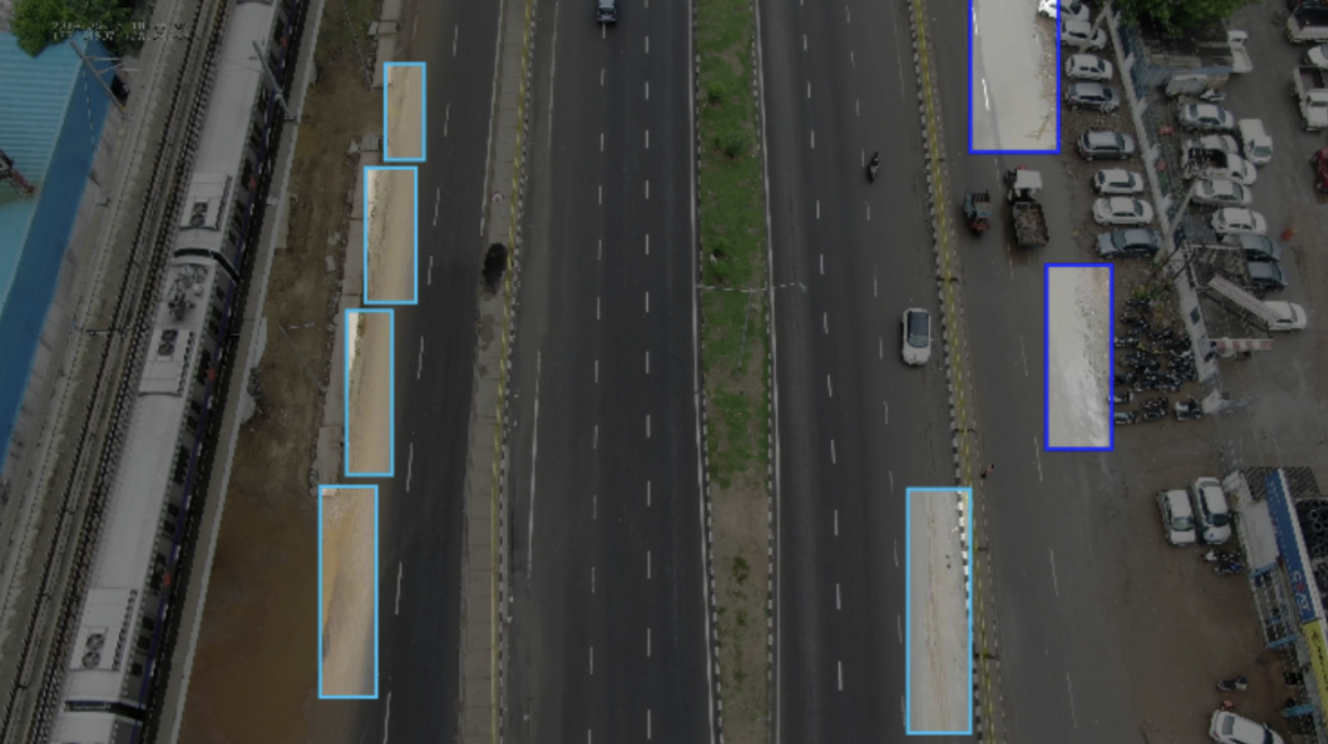
- 十大标注类别:鳄鱼纹裂缝、发丝裂缝、纵向裂缝、泥堆、泥泞道路、坑洼、松散剥落、路边垃圾、内涝;
- 实景覆盖工况:雨后积水反光、正午强光、树荫大面积遮挡、阴天低对比度、车流干扰、路边土方堆积6类高速真实拍摄环境;
1.3 素材落地应用价值
- 高速公路多类型路面破损、积水杂物一体化检测算法训练、消融对比实验;
- 无人机高速全域智能巡检系统、数字化养护管理平台开发;
- 自动区分结构性病害与临时环境隐患,划分养护处置优先级,优化人力物料分配;
- 雨季高速内涝实时监测预警,辅助交管部门快速封路、排水处置;
- 辅助驾驶路况感知、道路安全隐患识别课题研究;
- 交通工程、计算机视觉专业毕业设计、实训实验图像素材;
- 结合大语言模型实现隐患识别+分级处置方案自动生成多模态运维系统。
二、图像素材核心特性拆解
- 类别划分贴合高速养护与交管双重处置规范
素材同时覆盖结构性路面损伤与交通安全环境隐患:发丝/纵向/鳄鱼纹裂缝、坑洼、松散剥落属于长期路面破损,纳入季度养护计划;泥堆、泥泞、路边垃圾、内涝属于即时安全隐患,需紧急清障排水,标签分类可直接对接养护工单、交管预警两套业务流程。 - 积水、弱纹理细微目标样本占比充足
超43%图像包含雨后积水反光、浅滩内涝、发丝微裂缝低对比度画面,解决通用道路素材多为干燥清晰路面、雨天实景部署漏检严重的行业短板。 - 原生标准化YOLO标注,开箱即可训练
图像文件与标签文件一一对应,坐标完成归一化处理,省去格式转换、坐标修正开发工时。 - 样本体量适配普通消费级显卡训练
1300张图像在RTX3060/4060显卡即可完成完整训练迭代,中小企业、院校无需采购高性能工作站。 - 配套完整工具脚本,形成工程业务闭环
附带样本分层划分、标签越界噪点清洗、积水反光图像对比度校正、模型训练、航拍批量推理全套Python代码,可直接接入无人机巡检后台系统。


三、工程目录结构
highway_multi_hazard_data/
├── images/
│ ├── train/ # 训练集航拍图像 1040张
│ └── val/ # 验证集航拍图像 260张
├── labels/
│ ├── train/ # 训练集YOLO标注txt文件
│ └── val/ # 验证集YOLO标注txt文件
├── highway_hazard.yaml # YOLO训练专用配置文件
├── split_highway_data.py # 数据集分层划分脚本
├── clean_highway_label.py # 标注噪点清洗修复工具
├── water_reflect_enhance.py # 积水反光图像预处理增强
├── train_yolo_highway.py # 高速多隐患模型训练程序
└── highway_batch_infer.py # 航拍图像批量推理接口highway_hazard.yaml 训练配置文件
yaml
# 高速公路航拍多隐患检测训练配置
train: ./images/train
val: ./images/val
nc: 9
names:
0: alligator_crack # 鳄鱼纹裂缝
1: hair_crack # 发丝细微裂缝
2: vertical_crack # 纵向裂缝
3: mud_pile # 泥堆堆积
4: muddy_road # 泥泞路面
5: pothole # 坑洼沉陷
6: spalling # 路面松散剥落
7: roadside_trash # 路边垃圾杂物
8: waterlogging # 路面内涝积水
# 积水、微裂缝专属训练参数
imgsz: 640
conf: 0.19
iou: 0.40
mosaic: 1.0
mixup: 0.15四、深度学习配套完整代码(附高速航拍落地场景注释)
4.1 数据集分层划分脚本(场景注释:8:2分层抽样均衡9类隐患样本,避免模型对坑洼、大块积水过拟合,降低发丝裂缝、细小垃圾漏检概率)
python
# split_highway_data.py 高速航拍多隐患数据集自动分层划分工具
# 适用场景:原始高速航拍图像批量拆分训练/验证集,均衡裂缝、积水、垃圾各类样本分布
import os
import random
import shutil
from tqdm import tqdm
# 原始航拍素材路径
RAW_IMG = "./raw_highway_uav_images"
RAW_LBL = "./raw_labels"
OUT_ROOT = "./"
TRAIN_RATIO = 0.8
def create_output_folders():
dir_list = [
f"{OUT_ROOT}/images/train", f"{OUT_ROOT}/images/val",
f"{OUT_ROOT}/labels/train", f"{OUT_ROOT}/labels/val"
]
for path in dir_list:
os.makedirs(path, exist_ok=True)
def split_dataset():
create_output_folders()
img_files = [f for f in os.listdir(RAW_IMG) if f.endswith(("jpg", "png", "jpeg"))]
random.seed(42) # 固定随机种子,保证实验结果可复现
random.shuffle(img_files)
train_count = int(len(img_files) * TRAIN_RATIO)
train_img_list = img_files[:train_count]
val_img_list = img_files[train_count:]
# 迁移训练集图像与对应标签
for img_name in tqdm(train_img_list, desc="生成训练集高速航拍图像"):
shutil.copy(f"{RAW_IMG}/{img_name}", f"{OUT_ROOT}/images/train/{img_name}")
label_name = img_name.rsplit(".", 1)[0] + ".txt"
shutil.copy(f"{RAW_LBL}/{label_name}", f"{OUT_ROOT}/labels/train/{label_name}")
# 迁移验证集图像与对应标签
for img_name in tqdm(val_img_list, desc="生成验证集高速航拍图像"):
shutil.copy(f"{RAW_IMG}/{img_name}", f"{OUT_ROOT}/images/val/{img_name}")
label_name = img_name.rsplit(".", 1)[0] + ".txt"
shutil.copy(f"{RAW_LBL}/{label_name}", f"{OUT_ROOT}/labels/val/{label_name}")
print(f"数据集划分完成:训练集{len(train_img_list)}张,验证集{len(val_img_list)}张")
if __name__ == "__main__":
split_dataset()4.2 标注清洗修复脚本(场景注释:航拍画面易把路面石子、反光噪点误标为裂缝/积水,批量过滤极小无效框、修复越界归一化坐标,降低训练噪声)
python
# clean_highway_label.py 高速路面隐患标注批量清洗脚本
# 适用场景:航拍远景图像标注溢出、路面细碎噪点误标注统一修正过滤
import os
import glob
import cv2
IMG_ROOT = "./images"
LBL_ROOT = "./labels"
COORD_MIN = 1e-6
COORD_MAX = 1 - 1e-6
# 将坐标限制在0~1归一化区间
def clamp_coord(val):
return max(COORD_MIN, min(COORD_MAX, val))
def clean_all_labels():
img_paths = glob.glob(os.path.join(IMG_ROOT, "*/*.*"))
fix_box_cnt = 0
drop_box_cnt = 0
for img_p in img_paths:
img = cv2.imread(img_p)
if img is None:
continue
h, w = img.shape[:2]
lbl_p = img_p.replace("images", "labels").rsplit(".", 1)[0] + ".txt"
if not os.path.exists(lbl_p):
continue
new_label_lines = []
with open(lbl_p, "r", encoding="utf-8") as f:
lines = f.readlines()
for line in lines:
line = line.strip()
if not line:
continue
parts = list(map(float, line.split()))
cls, xc, yc, bw, bh = parts[0], parts[1], parts[2], parts[3], parts[4]
# 过滤极小噪点标注(非真实积水/裂缝/垃圾)
if bw < 0.003 or bh < 0.003:
drop_box_cnt += 1
continue
xc = clamp_coord(xc)
yc = clamp_coord(xc)
bw = clamp_coord(bw)
bh = clamp_coord(bh)
new_label_lines.append(f"{int(cls)} {xc:.6f} {yc:.6f} {bw:.6f}\n")
fix_box_cnt += 1
with open(lbl_p, "w", encoding="utf-8") as f:
f.writelines(new_label_lines)
print(f"标签清洗完成:修复标注框{fix_box_cnt}个,删除无效噪点框{drop_box_cnt}")
if __name__ == "__main__":
clean_all_labels()4.3 积水反光图像增强脚本(场景注释:雨后航拍积水镜面反光会淹没裂缝纹理,自适应校正对比度,强化积水边界与细微裂缝特征)
python
# water_reflect_enhance.py 高速积水航拍图像对比度校正工具
# 适用场景:雨后积水反光画面增强,区分积水区域与路面细微裂缝
import cv2
import numpy as np
import os
def reflect_enhance(img):
# 分离通道、自适应直方图均衡抑制镜面反光
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
h, s, v = cv2.split(hsv)
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
v_enhance = clahe.apply(v)
hsv_enhance = cv2.merge((h, s, v_enhance))
return cv2.cvtColor(hsv_enhance, cv2.COLOR_HSV2BGR)
def batch_enhance(src_dir, out_dir):
os.makedirs(out_dir, exist_ok=True)
img_list = os.listdir(src_dir)
for name in img_list:
path = os.path.join(src_dir, name)
img = cv2.imread(path)
if img is None:
continue
enhance_img = reflect_enhance(img)
cv2.imwrite(os.path.join(out_dir, name), enhance_img)
print(f"积水反光图像增强完成,输出路径:{out_dir}")
if __name__ == "__main__":
batch_enhance("./raw_highway_uav_images", "./enhance_highway_images")4.4 YOLO高速多隐患训练脚本(场景注释:极低置信阈值捕捉发丝裂缝、浅积水;开大Mosaic模拟多隐患混杂路面;早停策略防止积水反光样本过拟合)
python
# train_yolo_highway.py 高速多路面隐患检测训练主程序
# 适用场景:积水、微裂缝、细小垃圾多目标航拍图像专用训练参数
from ultralytics import YOLO
import torch
torch.manual_seed(42)
# 轻量化nano模型适配无人机机载边缘设备实时推理
model = YOLO("yolov8n.pt")
train_result = model.train(
data="./highway_multi_hazard_data/highway_hazard.yaml",
epochs=135,
imgsz=640,
batch=12,
device=0,
conf=0.19,
iou=0.40,
mosaic=1.0,
mixup=0.15,
patience=15,
project="highway_uav_exp",
name="multi_hazard_v1"
)
print("模型训练完成,最优权重保存路径:runs/highway_uav_exp/multi_hazard_v1/weights/best.pt")4.5 航拍批量推理接口(场景注释:单次高速巡检数百张航拍图批量识别,区分结构性病害与即时安全隐患,输出分级报表用于养护、交管派单)
python
# highway_batch_infer.py 高速航拍图像批量隐患识别服务
# 适用场景:无人机巡检图像批量自动检测,统计积水、裂缝、垃圾数量并分级
from ultralytics import YOLO
import os
# 加载训练完成高速多隐患检测权重
model = YOLO("./weights/best.pt")
def batch_detect_highway(img_folder, save_draw=False):
all_inspect_report = []
img_files = [f for f in os.listdir(img_folder) if f.endswith(("jpg", "png"))]
for img_name in img_files:
img_path = os.path.join(img_folder, img_name)
res = model(img_path, conf=0.19)
single_record = {"img_name": img_name, "hazard_list": []}
for r in res:
boxes = r.boxes
cls_map = r.names
for box in boxes:
cid = int(box.cls)
hazard_name = cls_map[cid]
conf = round(float(box.conf), 3)
single_record["hazard_list"].append({"type": hazard_name, "conf": conf})
if save_draw:
r.save(f"./highway_infer_out/{img_name}")
all_inspect_report.append(single_record)
return all_inspect_report
if __name__ == "__main__":
result = batch_detect_highway("./uav_highway_batch", save_draw=True)
print("高速航拍隐患批量识别完成,巡检报表数据:", result)五、整套交付素材完整清单
- 1300张高速公路实地无人机航拍图像,完整覆盖路面裂缝、坑洼、松散剥落、泥堆、泥泞、路边垃圾、内涝积水全九类隐患;
- 总计6240条标准YOLO归一化txt标注文件,无越界、反光噪点无效标注;
- 全套Python工程脚本:数据集分层划分、标注批量清洗、积水反光图像增强、模型训练、航拍批量推理,全部附带高速业务注释;
- 适配九类路面隐患的yaml训练配置文件;
- 配套文字操作文档:深度学习环境部署、积水弱目标专属调参、模型轻量化导出至机载硬件教程;
- 雨天、逆光复杂航拍场景训练优化手册,提升野外全天候识别稳定性。
六、素材二次开发拓展方向
- 搭建高速一体化智能巡检运维平台
结合无人机GPS定位数据,识别隐患后自动生成路段热力图,区分紧急清障点与常规养护路段,自动输出维修、排水、清障工单。 - 轻量化模型部署至无人机机载设备
通过ONNX量化、TensorRT加速压缩模型,实现飞行途中实时识别积水、散落垃圾,同步回传预警信息至交管平台。 - 扩充全路况综合标注素材
新增隧道路面、桥面铺装、冬季积雪结冰样本,构建全天候高速隐患识别图像库。 - 目标检测升级像素级分割任务
将矩形标注转换掩码标签,训练分割模型精准计算积水面积、裂缝总长,量化路面破损与内涝风险等级。
七、一键运行执行命令
bash
# 1. 创建高速检测专用深度学习虚拟环境
conda create -n highway_yolo python=3.10
conda activate highway_yolo
pip install ultralytics opencv-python torch tqdm numpy
# 2. 自动分层拆分训练集与验证集
python split_highway_data.py
# 3. 批量清洗修正全部标注文件
python clean_highway_label.py
# 4. 积水反光航拍图像对比度增强预处理
python water_reflect_enhance.py
# 5. 启动高速多隐患YOLO模型训练
python train_yolo_highway.py
# 6. 批量无人机航拍图像推理测试
python highway_batch_infer.py八、素材落地适配业务场景
- 各省高速集团、交通局无人机全域智能巡检项目研发;
- 高速公路雨季内涝应急监测、路面常态化养护系统升级;
- 交通工程、测绘、计算机视觉专业毕业设计与实训课题;
- 自动驾驶路况感知、多类别小目标检测算法对照实验;
- 无人机机载识别硬件、高速养护管理APP产品开发。
九、整套素材核心优势总结
- 全部为高速真实航拍画面,九类隐患同时覆盖路面结构性破损与交通安全临时隐患,同时匹配养护、交管两套业务处置标准;
- 雨后积水、逆光、发丝微裂缝低对比度样本充足,雨天野外实景漏检、误检远低于通用道路素材;
- 原生YOLO标准标注格式,无需额外格式转换,拿到素材即可启动模型训练,大幅缩短项目研发周期;
- 1300张样本体量适中,普通消费级显卡即可完成完整训练迭代,中小企业研发硬件门槛低;
- 配套从数据预处理到批量识别完整工程脚本,稍加修改就能对接现有无人机巡检后台,快速落地业务。
十、素材后续迭代规划
- 扩充航拍实拍图像至4000张以上,覆盖南北不同气候高速、隧道、桥面多工况;
- 新增雨雪、雾天低能见度航拍配套素材,提升全天候识别能力;
- 开发COCO、VOC格式转换工具,兼容MMDetection等更多检测框架;
- 接入大语言诊断模块,识别积水、裂缝、垃圾后自动输出排水、清障、路面修复标准化方案。