前言
- 我们在很早以前就讲过在
ROS noetic上配置过Astra S的基础使用教程 - 最近项目中拿到一个
Astra Plus Pro,于是就有了本文。 - 本文将使用
Astra Plus Pro深度相机,进行RTAB-Map算法的配置,达到视觉SLAM建图与定位的效果,最终达成以下效果: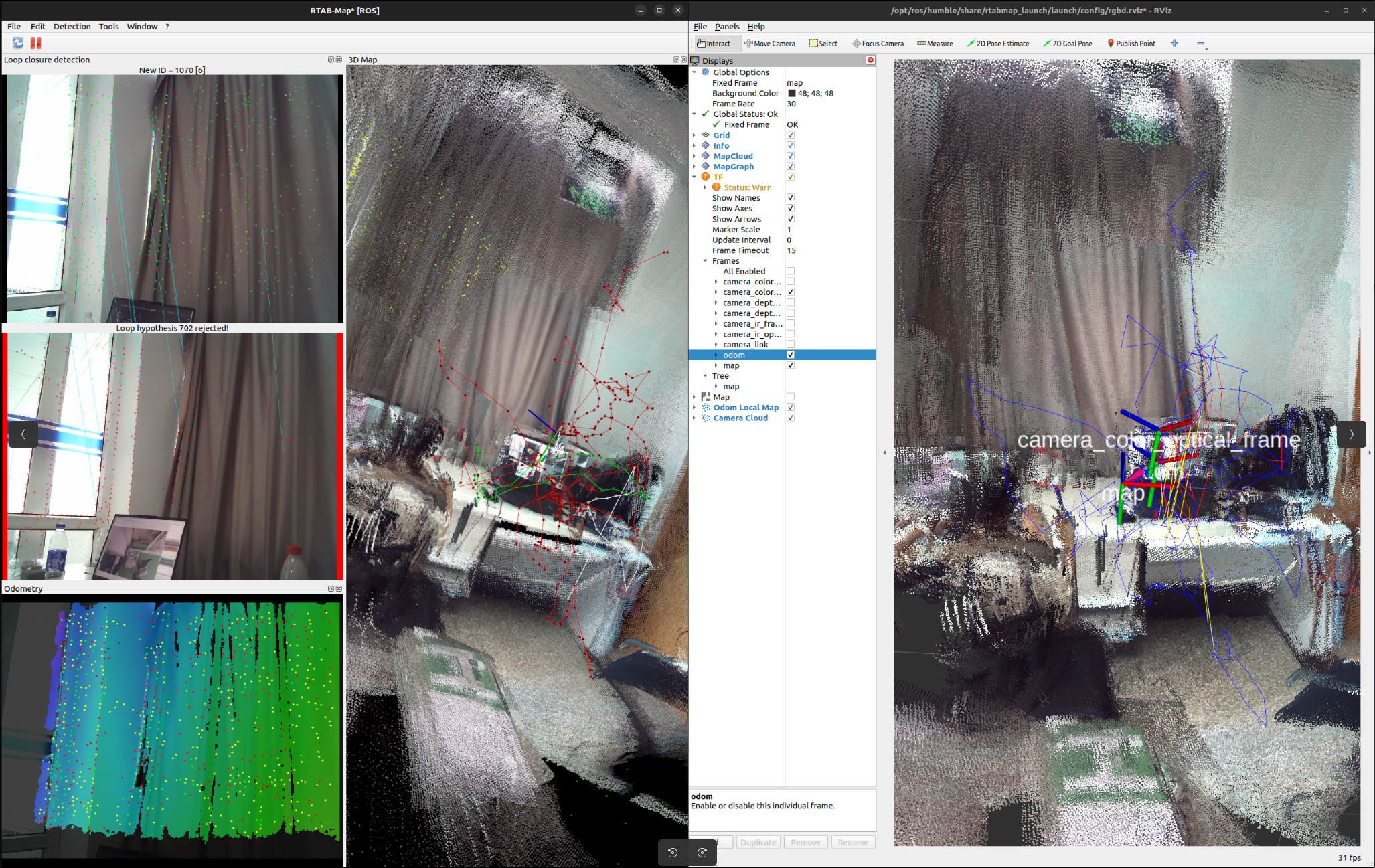
1 深度相机Astra Plus Pro配置
1-1 RGBD(RGB + Depth)
Astra Pro Plus是一款基于 结构光(Structured Light)技术 的 RGB-D 深度相机,由 Orbbec 公司推出,用于获取环境的彩色图像与深度信息。- 该设备通过 RGB 相机获取彩色图像,通过红外结构光系统计算深度信息,从而实现每个像素对应真实空间距离的 RGB-D 数据输出。
- 其主要特点如下:
- 支持 RGB 彩色图像与深度图同步输出
- 深度范围约为 0.6m ~ 8m
- RGB 分辨率最高可达 1920×1080 @ 30fps
- 深度分辨率最高可达 640×480 @ 30fps
- 支持输出 RGB 图像、深度图、红外图及点云数据
- 适用于室内机器人、SLAM建图、3D重建等应用场景
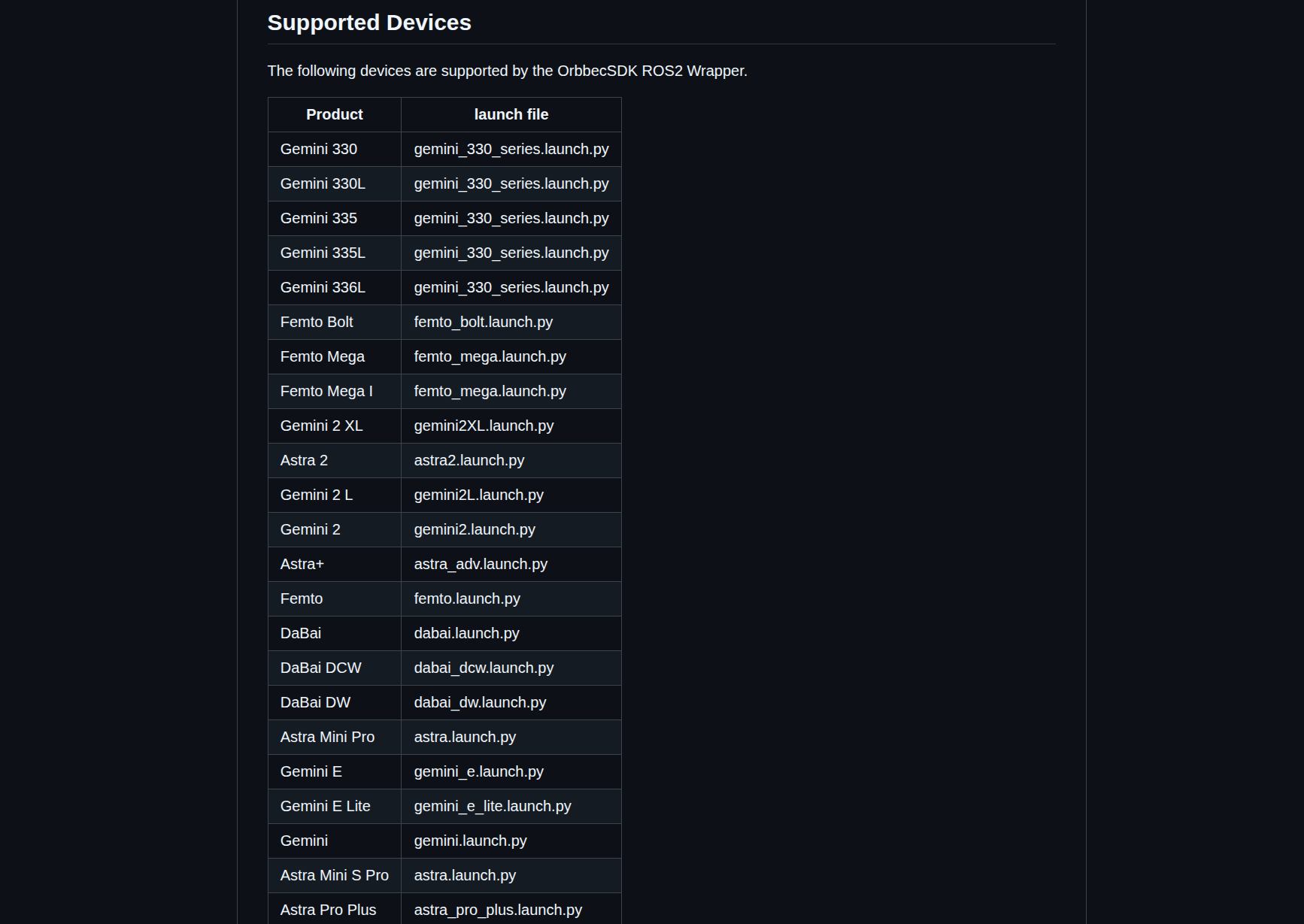
1-2 OrbbecSDK_ROS2安装与配置
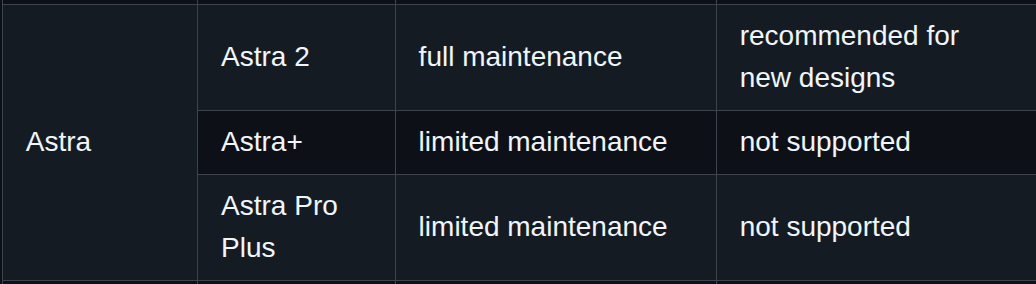
- 首先的当务之急是确认自己的相机版本,不同相机型号对应的sdk版本和兼容性不一样,务必先确认版本!
- 官网:https://github.com/orbbec/OrbbecSDK_ROS2/tree/main
- 注意默认拉取仓库时候的分支是
v2-main,这里我们使用的是Astra Plus Pro只在v1支持,所以必须进行切换 - 我们创建一个工作空间,然后拉取仓库
bash
mkdir -p ~/orbbsec_ws/src
cd ~/orbbsec_ws/src
git clone https://github.com/orbbec/OrbbecSDK_ROS2.git
git checkout main- 安装依赖
bash
sudo apt install libgflags-dev nlohmann-json3-dev \
ros-$ROS_DISTRO-image-transport ros-${ROS_DISTRO}-image-transport-plugins ros-${ROS_DISTRO}-compressed-image-transport \
ros-$ROS_DISTRO-image-publisher ros-$ROS_DISTRO-camera-info-manager \
ros-$ROS_DISTRO-diagnostic-updater ros-$ROS_DISTRO-diagnostic-msgs ros-$ROS_DISTRO-statistics-msgs \
ros-$ROS_DISTRO-backward-ros libdw-dev- 然后我们需要加载
udev规则
bash
cd ~/orbbsec_ws/src/OrbbecSDK_ROS2/orbbec_camera/scripts
sudo bash install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger- 准备好以后我们就可以直接编译了
bash
cd ~/orbbsec_ws
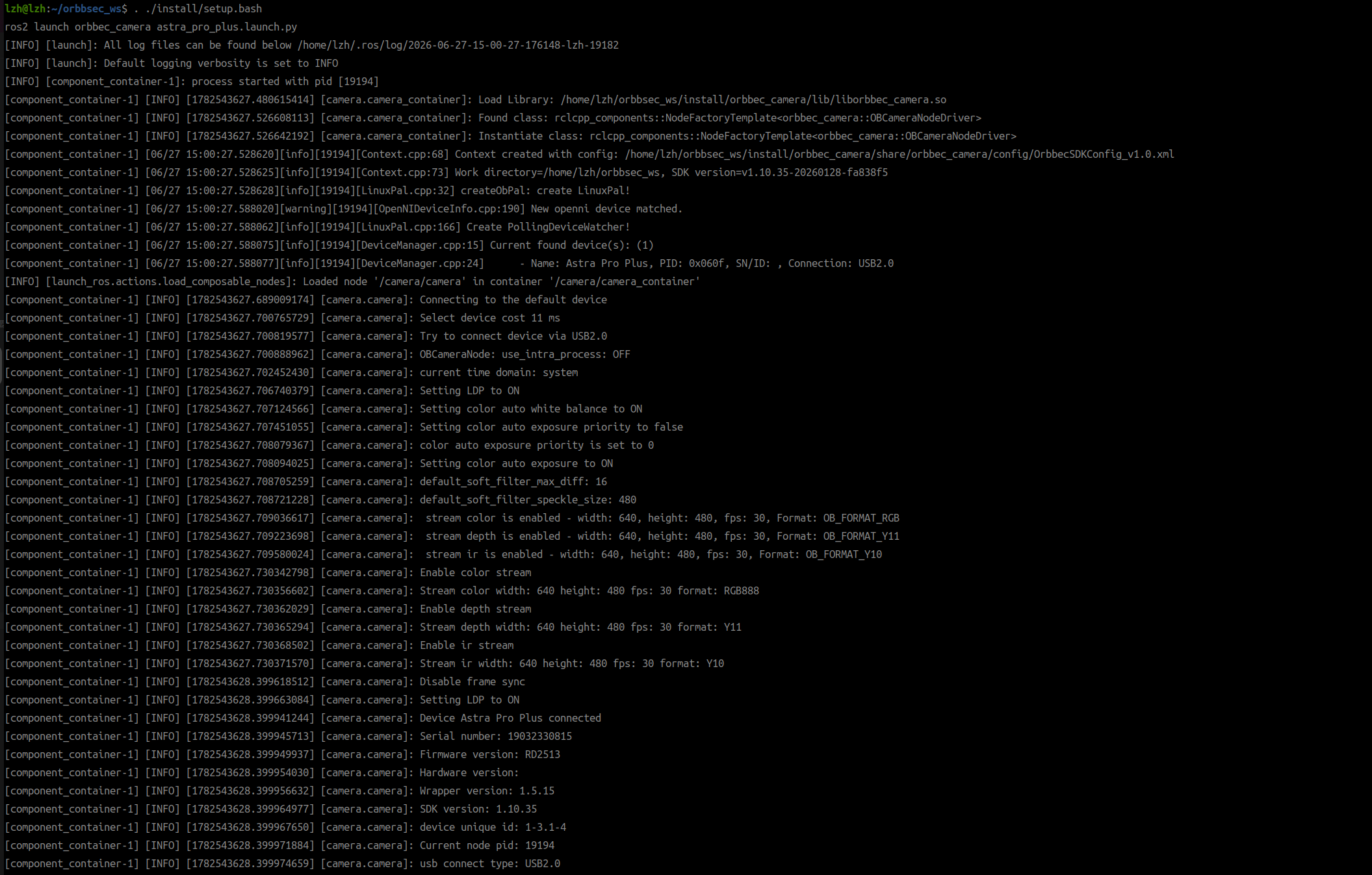
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release1-3 驱动
- 根据自己相机的型号,找到对应的启动文件
bash
. ./install/setup.bash
ros2 launch orbbec_camera astra_pro_plus.launch.py - 启动后,我们可以
打开rviz2进行可视化
bash
. ./install/setup.bash
rviz2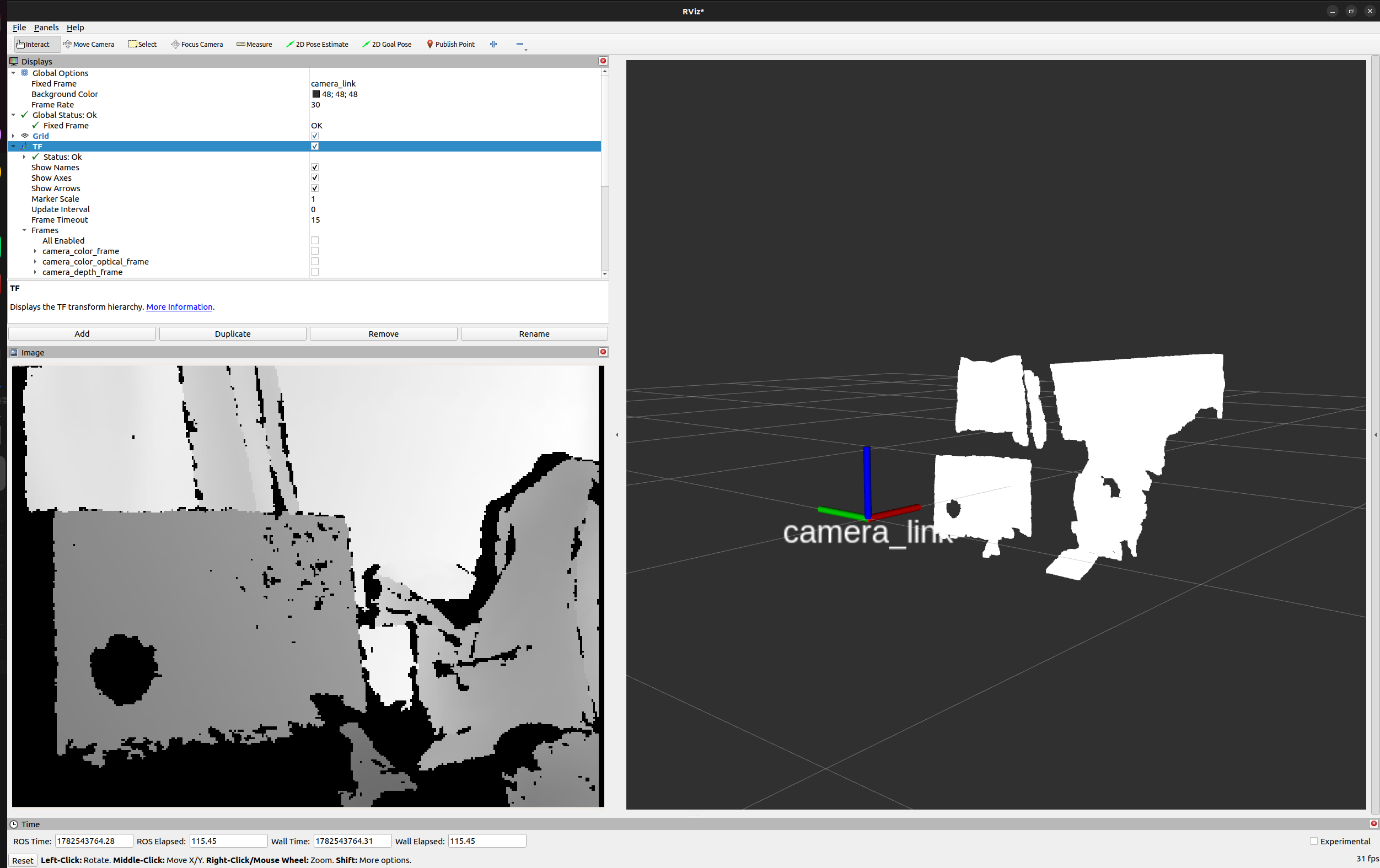
1-4 话题说明
1-4-1 RGB 彩色图像相关
/camera/color/image_raw:彩色相机输出的原始RGB图像数据,用于视觉SLAM、目标识别与图像处理。/camera/color/camera_info:彩色相机内参(焦距、主点、畸变系数),用于图像几何校正与RGB-D对齐。
1-4-2 压缩版本(用于传输优化)
/camera/color/image_raw/compressed:JPEG压缩后的彩色图像/camera/color/image_raw/compressedDepth:压缩的深度格式(一般用于跨网络传输)/camera/color/image_raw/theora:视频流编码格式(较少用于SLAM)
1-4-3 深度图像相关
/camera/depth/image_raw:深度相机输出的原始深度图,每个像素表示距离信息(单位通常为米或毫米),用于3D重建与SLAM。/camera/depth/camera_info:深度相机内参,用于深度图投影到三维空间。
1-4-4 深度压缩/传输版本
/camera/depth/image_raw/compressed:压缩深度图(用于网络传输)/camera/depth/image_raw/compressedDepth:深度压缩编码格式/camera/depth/image_raw/theora:视频编码深度流(低频使用)
1-4-5 点云数据(3D信息核心)
/camera/depth/points:由深度图 + 相机内参生成的三维点云数据(PointCloud2),用于:- 3D环境建图(RTAB-Map)
- 障碍物检测
- FAST-LIO2 / Voxel mapping
- RViz可视化
1-4-6 红外(IR)相机数据
/camera/ir/image_raw:红外图像数据(灰度图),用于结构光深度计算/camera/ir/camera_info:红外相机内参,用于深度计算与标定
1-4-7 IR压缩版本
/camera/ir/image_raw/compressed/camera/ir/image_raw/compressedDepth/camera/ir/image_raw/theora
1-4-8 深度处理与对齐信息
/camera/depth_filter_status:深度滤波状态信息(如降噪、孔洞填补状态)/camera/depth_to_color:深度图对齐到彩色图的结果/camera/depth_to_ir:深度图对齐到红外图的结果
2 RTAB-Map
2-1 视觉SLAM简述
- 视觉SLAM(Visual Simultaneous Localization and Mapping)是一种利用相机作为主要传感器,同时完成**环境建图(Mapping)与自身定位(Localization)**的技术。
- 其核心流程如下:
- 通过相机获取连续图像序列
- 提取图像特征(如ORB、SIFT等)
- 进行帧间匹配估计相机运动(视觉里程计)
- 构建位姿图(Pose Graph)
- 通过回环检测修正累计误差
- 输出一致的地图与位姿信息
2-2 视觉 SLAM分类
- 视觉 SLAM 大体分为几类:
- 特征点法(Feature-based)
- 直接法(Direct)
- 半直接法(Semi-direct)
2-2-1 特征点法(最经典 / 工程最常用)
-
代表算法:ORB-SLAM 系列(最重要)
- ORB-SLAM
- ORB-SLAM2(单目 / 双目 / RGB-D)
- ORB-SLAM3(支持视觉+IMU)
-
特点:
- 提取特征点(ORB / SIFT / FAST)
- 做特征匹配
- PnP求位姿
- 图优化 + 回环检测
2-2-2 直接法(Direct SLAM)
-
代表算法:
- LSD-SLAM
- DSO(Direct Sparse Odometry)
-
特点
- 不提特征点
- 直接用像素灰度变化
2-2-3 半直接法(SVO)
- 代表算法:SVO(Semi-direct Visual Odometry)
- 特点:少量特征 + 直接法结合
2-3 RTAB-Map
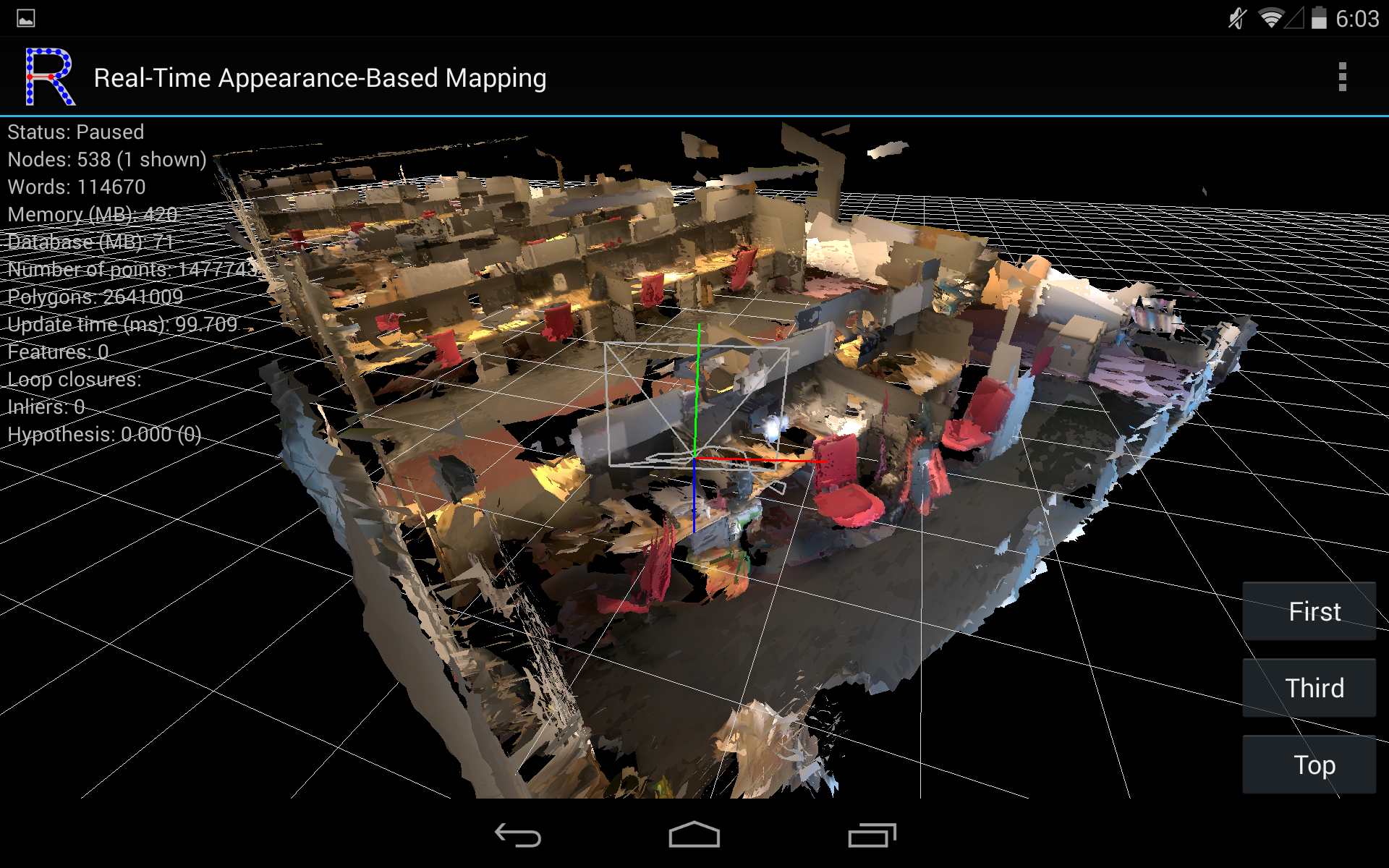
Real-Time Appearance-Based Mapping(实时外观/视觉建图)
- RTAB-Map 是一种基于**外观信息(Appearance-Based)与图优化(Graph Optimization)**的SLAM框架,主要用于实时RGB-D SLAM建图与定位。
- 其核心特点包括:
- 支持 RGB-D、双目、单目及激光雷达等多种传感器
- 基于图结构(Pose Graph)进行建图与优化
- 具备回环检测(Loop Closure)能力,可有效减少累计误差
- 采用基于外观特征的地点识别方法,提高长期定位稳定性
- 同时支持2D栅格地图与3D点云地图生成
- 值得一说的是:
- RTAB-Map 并不属于视觉SLAM中的单一算法类型(特征点法、直接法或半直接法),而是一种工程化的图优化视觉SLAM系统。
- RTAB-Map 实际上是多个SLAM思想的组合:
- 前端(Tracking):
- 基于特征点匹配(ORB / SURF / SIFT)
- 或结合 RGB-D 深度约束
- 后端(Optimization):
- 位姿图优化(Pose Graph Optimization)
- 回环检测(Loop Closure)
- 前端(Tracking):
2-4 RTAB-Map原理概述
- RTAB-Map 的核心原理可以概括为:基于外观特征的图优化SLAM系统,通过"记忆管理 + 回环检测 + 位姿图优化"实现长期稳定建图与定位。
2-4-1 数据输入层
- RTAB-Map 接收多种传感器输入,典型为 RGB-D 组合:
- RGB图像(/camera/color/image_raw)
- 深度图像(/camera/depth/image_raw)
- 相机内参(camera_info)
- 用于提供环境的视觉信息 + 三维结构信息。
2-4-2 前端:视觉里程计(Odometry)
- 在前端阶段,RTAB-Map 估计相机的相对运动:
- 提取图像特征点(ORB / SURF / SIFT)
- 进行帧间匹配
- 结合深度信息恢复3D点
- 计算相机位姿变化(motion estimation)
- 输出:
当前帧相对于上一帧的位姿(odometry)
2-4-3 节点生成(Keyframe Selection)
- 系统不会保存每一帧,而是:
- 选取"关键帧(Keyframes)"
- 每个关键帧包含:
- 图像信息
- 深度信息
- 位姿信息
- 特征描述子
- 这些关键帧构成图结构的节点(Node)。
2-4-4 回环检测(Loop Closure)
- RTAB-Map 的核心能力之一:
- 通过外观特征(Appearance-Based)
- 检测当前场景是否曾经访问过
- 如果匹配成功,则认为发生"回环"
- 作用:
修正累计误差(drift),提升地图全局一致性
2-4-5位姿图优化(Graph Optimization)
- 检测到回环后:
- 构建位姿图(Pose Graph)
- 节点 = 关键帧
- 边 = 相对位姿约束
- 构建位姿图(Pose Graph)
- 然后进行全局优化:
- 最小化整体误差
- 修正所有节点位置
2-4-6 地图生成(Mapping)
- 优化后的结果用于生成地图:
2-5 安装RTAB-Map
bash
sudo apt update
sudo apt install ros-humble-rtabmap ros-humble-rtabmap-ros2-6 启用建图
bash
ros2 launch rtabmap_launch rtabmap.launch.py \
rgb_topic:=/camera/color/image_raw \
depth_topic:=/camera/depth/image_raw \
camera_info_topic:=/camera/color/camera_info \
frame_id:=camera_color_optical_frame \
approx_sync:=true \
rgbd_sync:=true \
visual_odometry:=true \
use_sim_time:=false \
publish_tf:=true \
odom_frame_id:=odom \
base_frame_id:=base_link \
map_frame_id:=map \
rviz:=true \
delete_db_on_start:=true- 参数说明:
rgb_topic:RGB 图像输入depth_topic:深度图输入camera_info_topic:相机内参frame_id:输入帧(当前观测坐标系)approx_sync:是否使用近似时间同步 (设置为true允许 RGB 和 Depth 时间戳有轻微误差)rgbd_sync:是否启用 RGB-D 融合同步(设置为true:RGB + Depth 作为一帧联合处理(3D SLAM标准模式))visual_odometry:是否启用视觉里程计(VO)use_sim_time:是否使用仿真时间(/clock)publish_tf:是否发布 TF 变换树(发布map-odom)odom_frame_id:里程计坐标系名称base_frame_id:机器人底盘坐标系map_frame_id:全局地图坐标系rviz:是否自动启动 RViz 可视化delete_db_on_start:是否启动时清空数据库

2-7 保存地图
- 点击左上角的蓝色圈圈进行保存!\[Pasted image 20260627154143.png]
- 一共了几个选项:
- Global map optimized(全局优化地图):包含回环检测,误差最小
- Global map not optimized(全局未优化):原始轨迹(有漂移)
- Local map optimized(局部优化地图):只是一段"窗口地图"
- Local map not optimized(局部未优化):当前帧累积的原始局部点云
rtabmap.db是一个基于 SQLite 的 SLAM数据库,存储"图结构 + 关键帧 + 点云 + 优化信息"的完整工程状态。用来保存整个SLAM过程,并支持之后重新加载、优化和导出地图。- 相比与其他地图格式的优点:
- 可回放、可重建(最核心优势)
- 支持后期优化(Re-optimization)
- 保存完整SLAM信息(不是只存地图),额外会存储- 图结构(pose graph、关键帧图像(RGB/Depth)、特征点、回环约束、传感器数据(IMU/odom)等等
- 支持续建图(Incremental Mapping)
- 地图默认保存在
~/.ros/rtabmap.db!\[Pasted image 20260627153836.png]
bash
cd ~/.ros
ls
2-8 定位模式
- 在建图保存后,我们可以通过
database_path:=/home/lzh/.ros/rtabmap.db加载刚刚保存的地图,同时我们localization:=true开启定位模式
bash
ros2 launch rtabmap_launch rtabmap.launch.py \
database_path:=/home/lzh/.ros/rtabmap.db \
localization:=true \
rgb_topic:=/camera/color/image_raw \
depth_topic:=/camera/depth/image_raw \
camera_info_topic:=/camera/color/camera_info \
frame_id:=camera_color_optical_frame \
approx_sync:=true \
rgbd_sync:=true \
visual_odometry:=true \
rviz:=true- 当然你也可以不指定
database_path直接尝试进行定位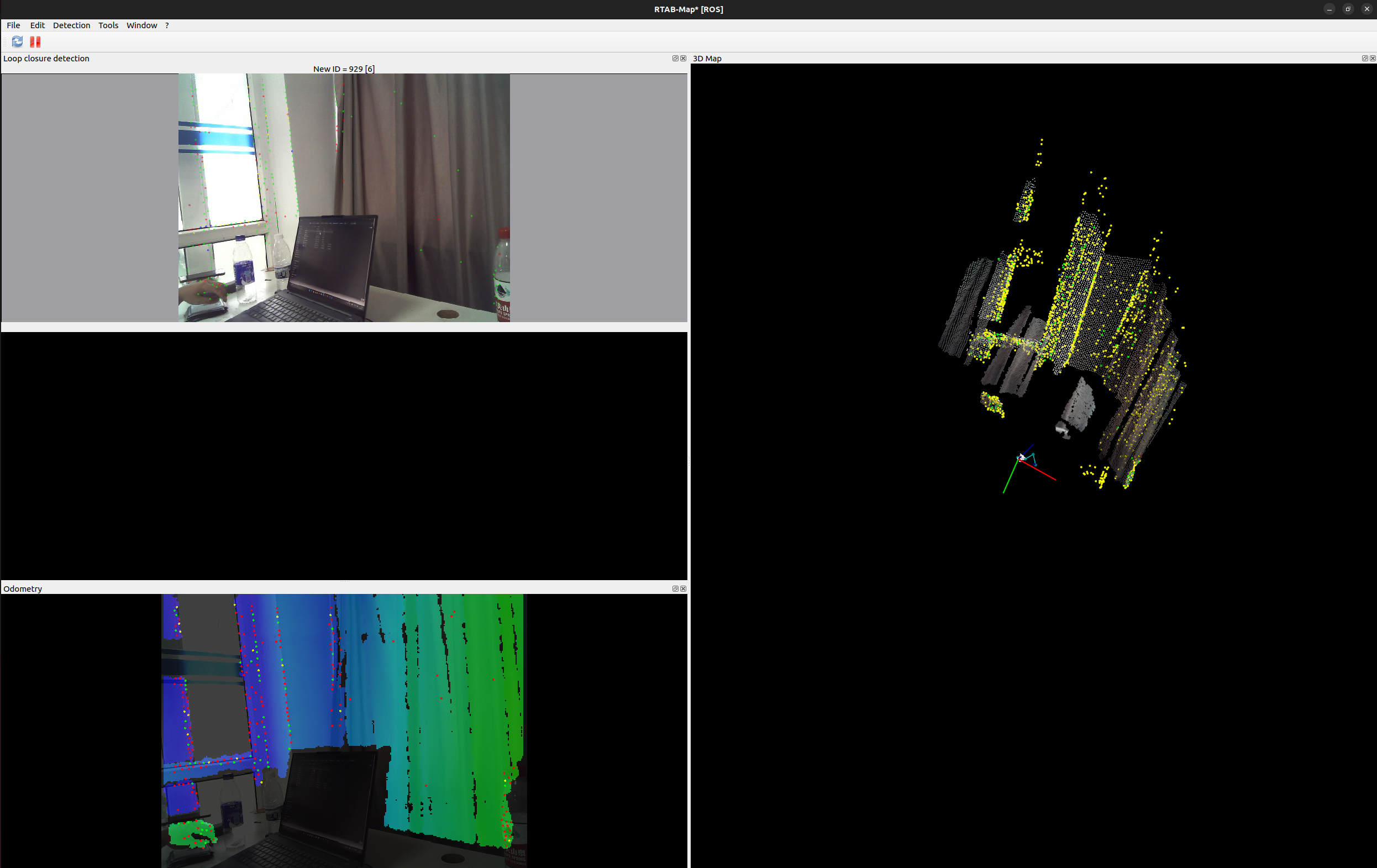
3 SDK 安装
- 本节为额外内容,
OrbbecSDK是官方提供的,不需要ros2直接使用的sdk
3-1 SDK安装
-
同样注意查看对应的sdk版本支持
-
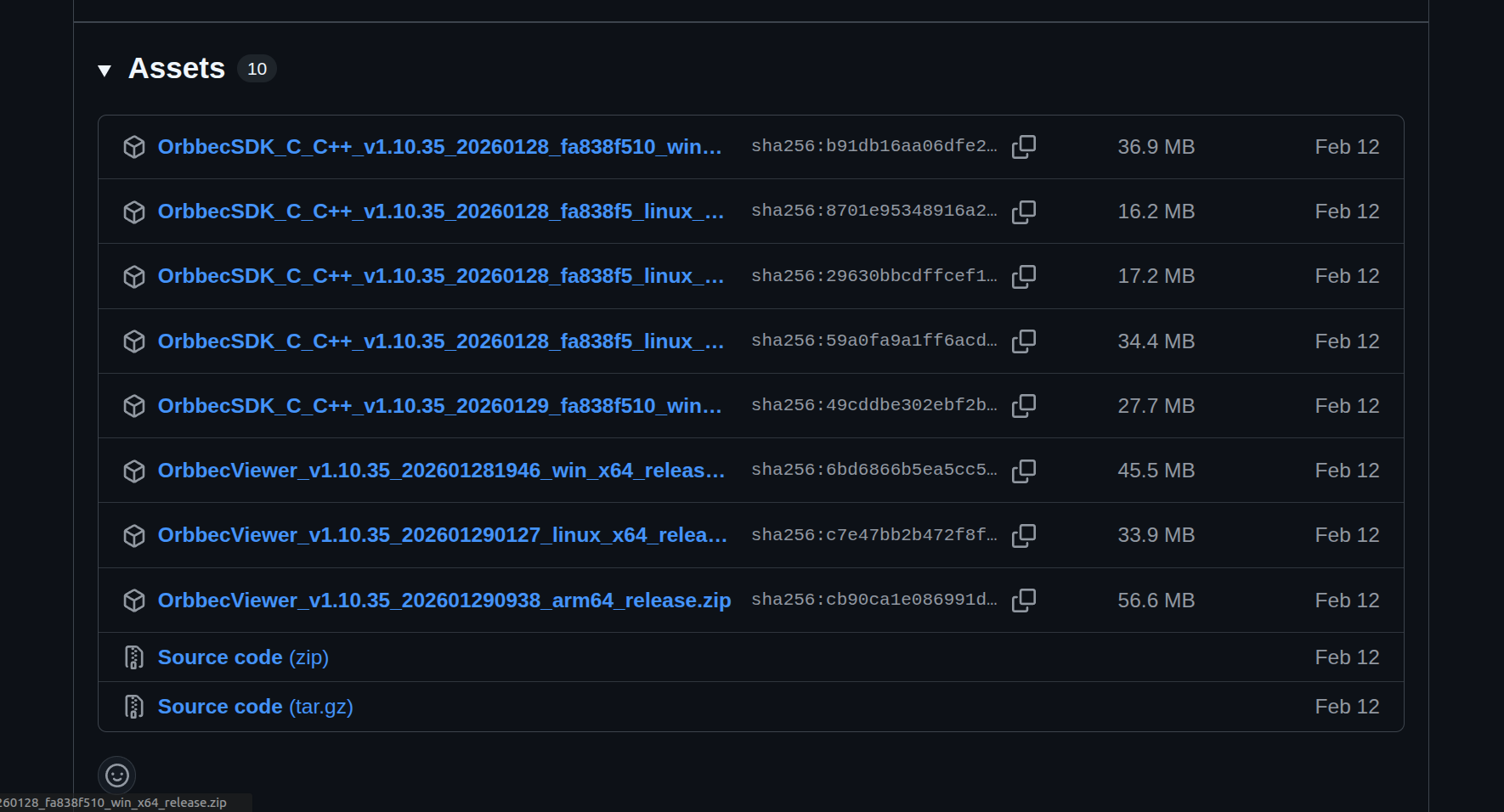
-
下载后我们直接解压
bash
unzip OrbbecSDK_C_C++_v1.10.35_20260128_fa838f5_linux_x64_release.zip
3-2 基础使用
bash
cd OrbbecSDK_v1.10.35/Example/bin
./HelloOrbbec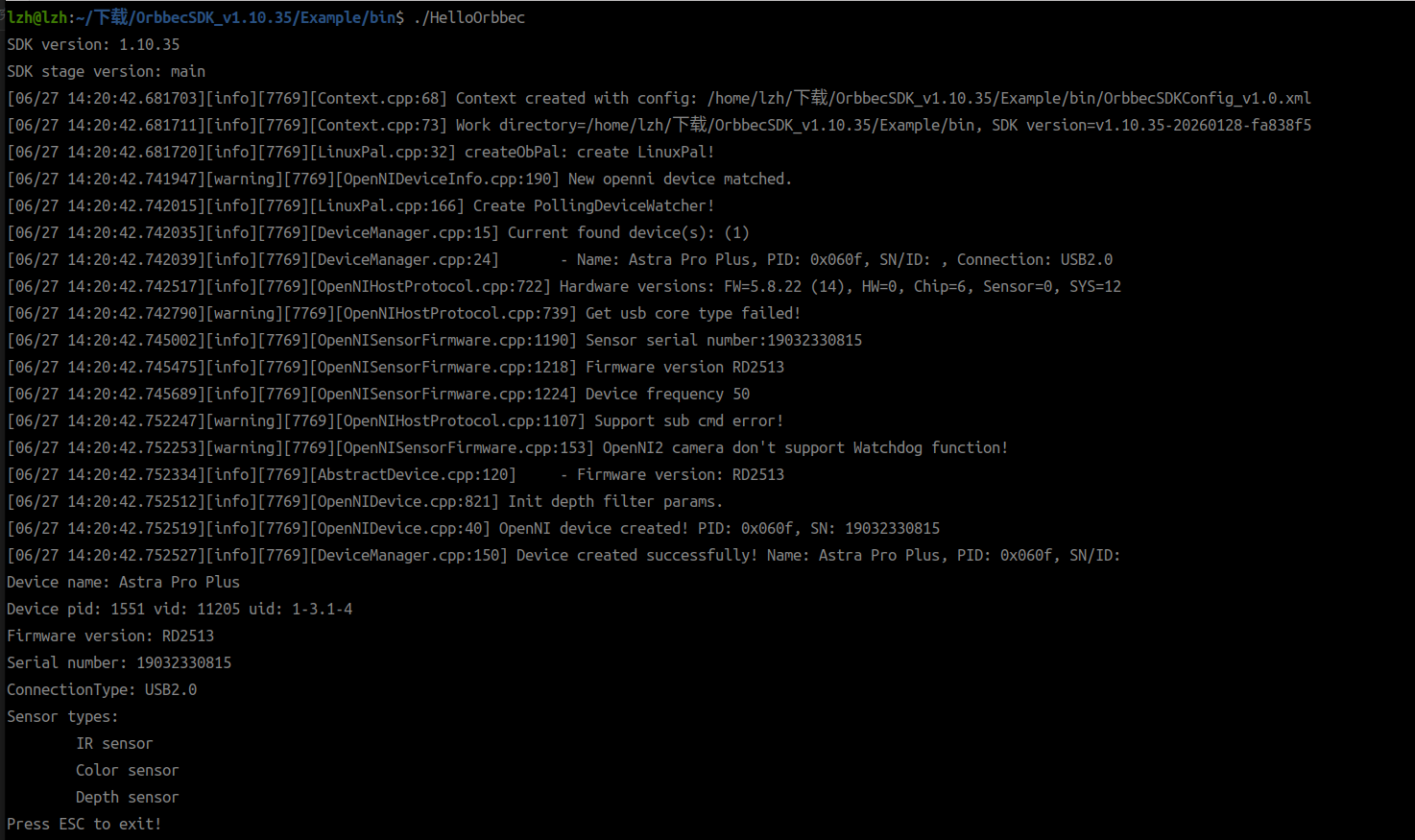
3-3 深度相机可视化
bash
cd OrbbecSDK_v1.10.35/Example/bin
./depth_viewer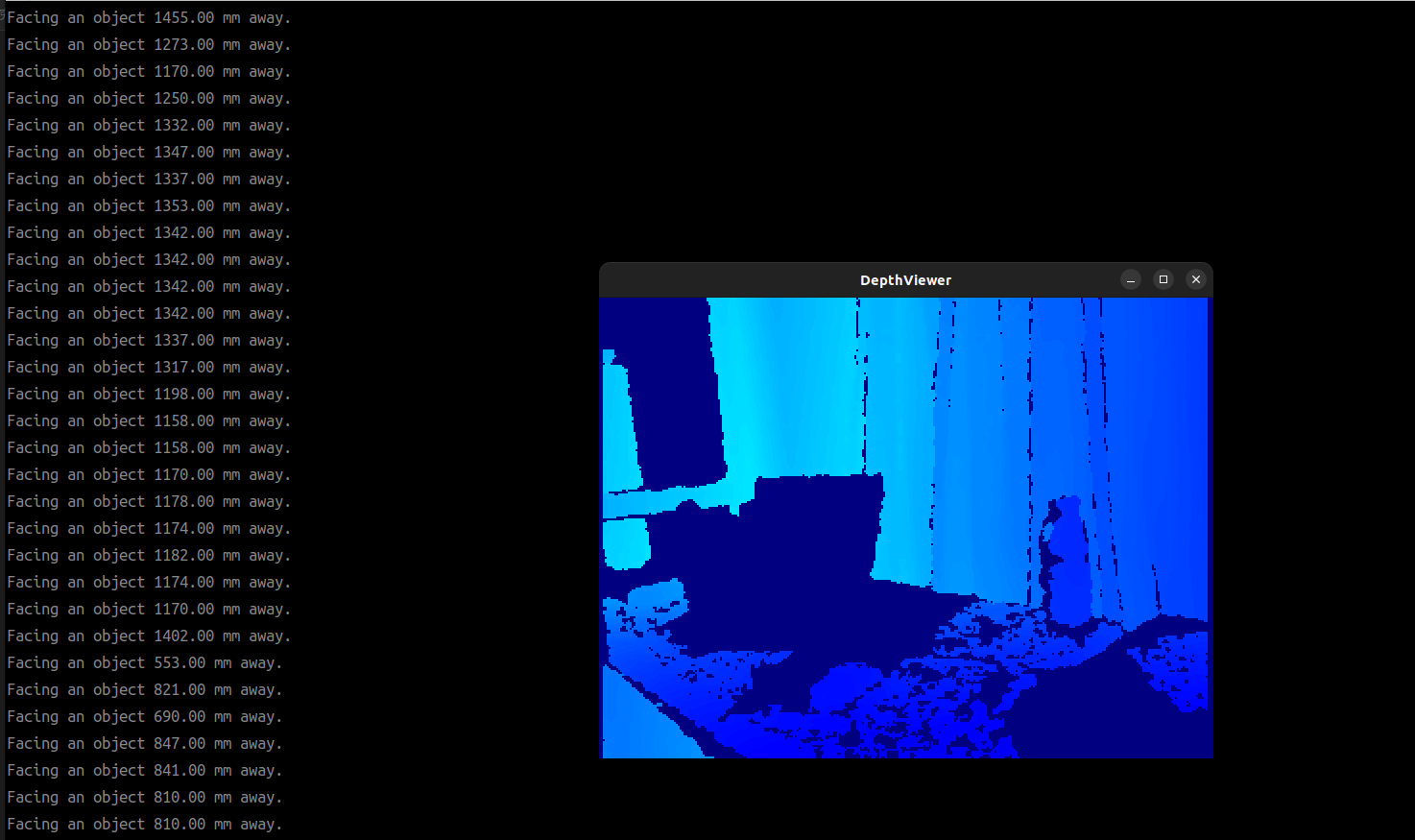
总结
- 本文使用
Astra Plus Pro深度相机,进行ROS2的RTAB-Map算法的配置,达到视觉SLAM建图与定位的效果 - 如有错误,欢迎指出!
- 感谢你的观看!