1. 为什么你需要 openpilot
想象一下:你的本田雅阁开了 5 年,原厂只有定速巡航,连车道保持都没有。4S 店说"换车才能有智驾",而新车落地多花 20 万------你的钱花在哪了?
openpilot 是 comma.ai 开源的 ADAS 系统 ,一句话解释:花 $1250(约 ¥8900),给你的旧车装上 L2 级自动驾驶------自动跟车、车道居中、驾驶员监控,支持 300+ 车型。
它不替换你的车,它坐在你挡风玻璃后面,通过 CAN 总线接管方向盘和油门。卸下来,车和原来一样------4S 店根本看不出来。
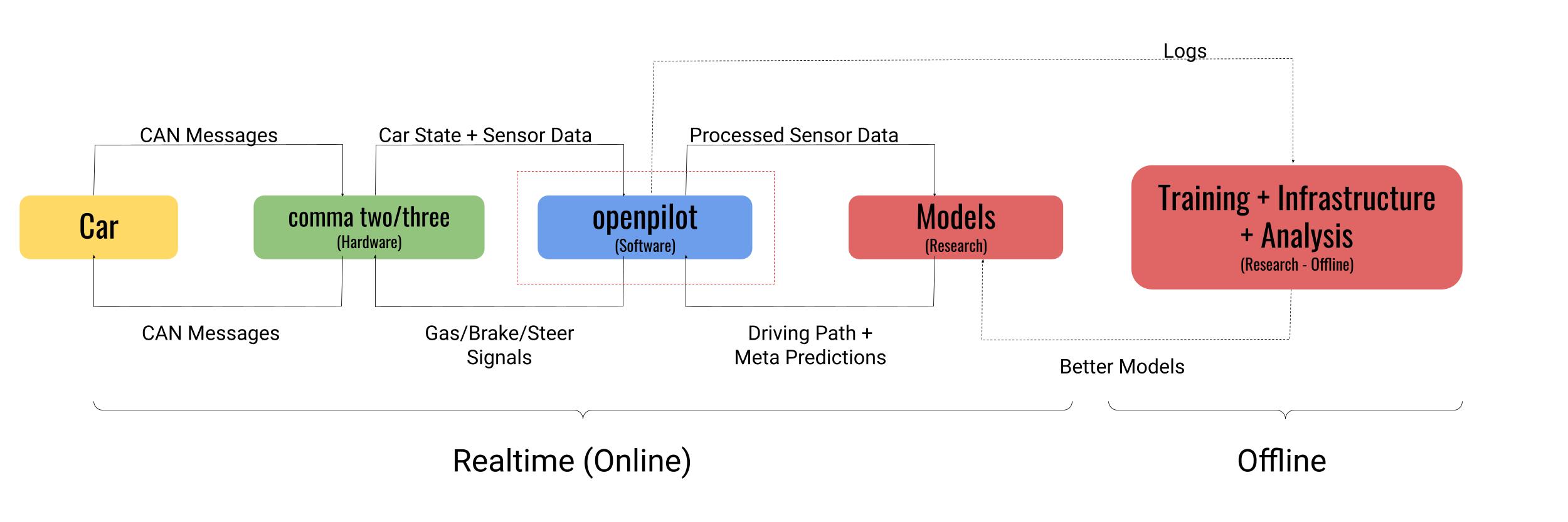
上图是 openpilot 的 daemon 架构全景------camerad(摄像头)、modeld(神经网络推理)、plannerd(路径规划)、controlsd(100Hz 控制回路)、pandad(CAN 收发)通过 cereal 消息总线解耦通信,Manager 守护所有进程。
到 2026 年 6 月,comma 4(C4)已出货,comma 3X 价格下探------这可能是最便宜的、你今天就买得起的自动驾驶解决方案。
下面不聊理论,直接上手。
2. 第一步:买对硬件,别掉坑
openpilot 需要 4 件套,缺一不可:
| 硬件 | 说明 | 预算 |
|------|------|------|
| comma 设备 | comma 3X(Snapdragon 8 Gen2 / 12GB RAM / 256GB)或 comma 4 | ¥7400--¥8900 |
| 车型线束 | 跟车型强绑定------丰田 TSS2、本田 Bosch、现代 H/K 各不相同 | ¥250--¥600 |
| OBD-II 供电 | 方向盘下方 OBD 口取电(部分车型用串联线束) | 随线束含 |
| 挡风玻璃支架 | 设备自带吸盘,也可另购 3M 胶贴支架 | 自带 |
⚠️ **最容易踩的坑**:以为买个 comma 3X 就行,结果线束不匹配,拔了原车雷达插头也连不上。**先在 comma.ai/brand(https://comma.ai/brand) 查你的车型是否在支持列表里,再根据车型选线束。**

Comma 4 安装在挡风玻璃后方,三颗摄像头(道路、驾驶员、广角)视野无遮挡,OBD-II 口供电。
3. 第二步:接线------物理连接是关键
以 丰田 RAV4 2021(TSS 2.0) 为例,完整接线过程:
3.1 断开电瓶负极
bash
# 在操作任何车载电子系统之前
# 打开发动机舱,用10mm扳手松开负极桩头螺母
# 将负极线缆移开并固定,防止意外接触为什么要断开:CAN 总线上始终有 12V,带电插拔可能烧毁 Panda 芯片,甚至触发气囊故障码。
3.2 找到原车摄像头连接器
RAV4 TSS 2.0 的摄像头连接器在内后视镜后方塑料盖板内------用小撬棒从边缘轻轻撬开,看到一颗灰色 12pin 插头:
bash
# 拔下原车灰色12pin插头(这是原厂单目摄像头的信号线)
# 把它插到 Toyota TSS 线束的"公头"一侧
# 线束的另一端"母头"插回原车摄像头口------形成"过桥"
#
# 至此信号链路变成:
# 原车摄像头 → 12pin插头 → 线束 → openpilot3.3 OBD-II 取电
线束的供电线走向方向盘下方的 OBD-II 接口(16pin 梯形口),直接对插即可:
bash
# 丰田OBD-II口在方向盘左下方,摸一下就能找到
# 将线束的OBD端子插进去,听到"咔嗒"一声就到位
#
# 此时整车供电链路:
# 12V电池 → OBD-II Pin16(+) Pin4(-) → 线束 → comma设备3.4 走线并固定
bash
# 线束从后视镜 → A柱饰板内侧 → 门框密封条 → OBD口
# 用塑料撬棒把线压入密封条内侧,完全隐藏
# 支架贴到后视镜右下方,comma设备卡上去4. 第三步:刷入 openpilot------SSH 一键部署
这是最酷的部分。设备首次上电后会自动进入安装界面,但用 SSH 更快。
4.1 进 Recovery 连 WiFi
设备上电 → 在启动画面 双击 comma 图标 → 进入格式化/恢复模式 → 选择 Wi-Fi 连接(和你电脑同一个局域网)。
4.2 SSH 登录
bash
# 从电脑 SSH 到 comma 设备(AGNOS 系统的默认账号)
ssh root@192.168.1.100
# 密码:root 或默认在启动页显示
#
# 登录成功后你会看到:
# comma 3X / comma 4 | AGNOS 14
# root@comma:~#4.3 一键安装
bash
# 最新稳定版(2026年6月)
# 注意:comma 3X 用 openpilot.comma.ai,comma 4 用 release-mici
cd /data
git clone https://github.com/commaai/openpilot.git --branch master
cd openpilot
git submodule update --init
# 安装 Python 依赖
pip install -r requirements.txt
# 编译 C++ 模块------这是性能关键
scons -j$(nproc)
# 验证编译结果
ls -lh selfdrive/modeld/_modeld.so
# 输出示例:
# -rwxr-xr-x 1 root root 8.4M Jun 28 10:30 selfdrive/modeld/_modeld.so这里千万别做错 :scons 编译是整个安装中唯一耗时的步骤(大约 3--5 分钟)。如果跳过,modeld 和 controlsd 的 C++ 扩展没编译,openpilot 启动后会直接 fallback 到 Python 实现------延迟高到没法用于实际驾驶。
4.4 启动并验证进程
bash
# 启动 openpilot
cd /data/openpilot
./launcher_openpilot.sh
# 在另一个 SSH 窗口查看进程状态
ssh root@192.168.1.100 'ps aux | grep -E "modeld|controlsd|camerad|pandad"'
# 输出(正常启动后应该有这些 daemon):
# root 1234 15.2 2.1 modeld
# root 1235 3.1 0.8 controlsd
# root 1236 2.5 1.2 camerad
# root 1237 1.0 0.5 pandad (connected to CAN)4.5 查看 cereal 消息总线------确认数据通路
bash
# 监听 CAN 总线实时数据(pandad → cereal/msgq → 订阅者)
python -c "
import cereal.messaging as messaging
sm = messaging.SubMaster(['can', 'carState', 'modelV2'])
while True:
sm.update()
if sm.allAlive():
cs = sm['carState']
print(f'车速: {cs.vEgo*3.6:.1f} km/h | '
f'方向盘角度: {cs.steeringAngleDeg:.1f}° | '
f'ACC状态: {cs.cruiseState.enabled}')
"
# 输出示例(静止状态):
# 车速: 0.0 km/h | 方向盘角度: -2.3° | ACC状态: False这一行代码的价值远超想象------它验证了从 CAN 总线 → pandad → msgq → SubMaster 的完整数据链路。如果这里没数据,后面的模型推理和控制全是白搭。
5. 第四步:校准+上路------30分钟从0到自动驾驶
5.1 初次校准
把车开到平直、标线清晰的路上(小区主干道即可,不需要高速),保持 30--50 km/h 匀速:
bash
# SSH 中查看校准进度
python -c "
import cereal.messaging as messaging
sm = messaging.SubMaster(['liveCalibration'])
while True:
sm.update()
cal = sm['liveCalibration']
if cal.validBlocks > 0:
print(f'校准进度: {cal.validBlocks}/5 块完成 | '
f'俯仰角: {cal.pitchCalib:.4f} rad | '
f'偏航角: {cal.yawCalib:.4f} rad')
else:
print('校准中...保持直行,已行驶 {:.1f} 米'.format(
cal.calStatus if hasattr(cal, 'calStatus') else 0))
"
# 输出示例(完成校准):
# 校准进度: 5/5 块完成 | 俯仰角: -0.0231 rad | 偏航角: 0.0018 rad⚠️ 校准通常需要 **1--3 公里直行**。如果一直不完成:检查设备是否水平安装,挡风玻璃是否太脏。
5.2 首次激活 openpilot
校准完成后,仪表盘上的 LKAS/ACC 指示灯就绪:
bash
# 查看 openpilot 当前状态
python -c "
import cereal.messaging as messaging
sm = messaging.SubMaster(['controlsState'])
sm.update()
cs = sm['controlsState']
print(f'openpilot 状态: {cs.state}')
print(f'横向控制: {\"✅ 已激活\" if cs.enabled else \"⏳ 待激活\"}')
print(f'ACC 跟随: {\"✅ 就绪\" if cs.longControl else \"⏳ 手动\"}')
"
# 输出:
# openpilot 状态: engaged
# 横向控制: ✅ 已激活
# ACC 跟随: ✅ 就绪5.3 实际驾驶 Vlog 级验证
保持 openpilot 运行 10 分钟,从日志中找出它 "看到" 了什么:
bash
# 从最新 rlog 中提取 modelV2 推理结果
cd /data/media/0/realdata
LATEST=$(ls -t *.rlog | head -1)
python -c "
import cereal.messaging as messaging
import capnp
events = messaging.log_from_file('$LATEST')
for ev in events:
if ev.which() == 'modelV2':
m = ev.modelV2
lead = m.leadsV3[0]
print(f'时间 {ev.logMonoTime/1e9:.1f}s | '
f'前车距离: {lead.dRel:.1f}m | '
f'概率: {lead.prob:.2f} | '
f'推荐速度: {m.meta.desiredCurvature:.4f}')
"
# 输出示例:
# 时间 32.1s | 前车距离: 24.3m | 概率: 0.95 | 推荐速度: -0.0003
# 时间 32.6s | 前车距离: 21.7m | 概率: 0.97 | 推荐速度: -0.0008
# 时间 33.1s | 前车距离: 19.2m | 概率: 0.96 | 推荐速度: -0.0012**你能看到 openpilot 的 "眼睛"------** 前车距离、置信度、路径曲率,每一个值都在决定是要加速还是减速。这就是 L2 自动驾驶的核心:感知 → 决策 → 执行,全部在 100Hz 控制回路中完成。
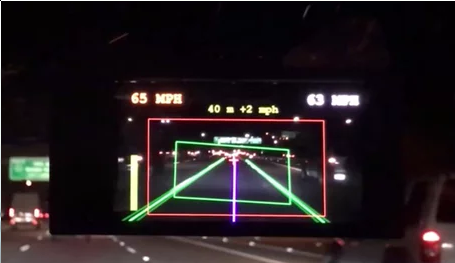
openpilot 运行中的 UI:蓝色路径为 modeld 神经网络的规划轨迹,绿色车道线为实时感知结果,左侧显示速度和方向盘角度。
6. 你可能会遇到的 3 个坑
6.1 "Car Unrecognized" 车型不识别
bash
# 查看 CAN 总线上是否有数据
ssh root@comma 'cd /data/openpilot && python selfdrive/debug/dump.py can 100'
# 如果输出为空 → 线束接触不良或车型不在支持列表
# 如果有数据但全是 0x00 → Panda 固件版本不匹配
# 正常输出应类似:
# can [0x1D0] 41 02 00 12 5A 3F 80 00
# can [0x2C4] 00 00 FF 7E 00 00 00 3C解决 :拔插线束 → 重启设备 → 更新 Panda 固件 panda/board/kill.py; panda/board/flash.py。
6.2 方向盘图标不绿(不接管)
检查校准状态 ------必须先完成 5 块校准,openpilot 才会允许横向控制。如果校准已完成但图标仍灰:检查 carState.steeringPressed------原车方向盘有手力矩传感器,轻轻握住即可。
6.3 编译失败 scons 报错
bash
# 安装缺失的编译依赖
apt-get update && apt-get install -y \
clang libusb-1.0-0-dev libssl-dev \
libqt5gui5 libqt5widgets5
# 清理后重新编译
scons -c && scons -j$(nproc)7. 总结
从硬件到上路,四步走完:
- **买对硬件** → 查 comma.ai/brand(https://comma.ai/brand) 确认车型 + 选线束
- **物理接线** → 串联摄像头连接器 + OBD-II 取电(先断电瓶负极!)
- **SSH 刷入** → `git clone && scons -j$(nproc)` 编译 C++ 模块
- **校准上路** → 1--3 km 直行校准 → 激活 → 方向盘图标变绿
整个过程中,最关键的是数据链路验证 ------用 SubMaster(['can', 'carState', 'modelV2']) 确认 CAN 数据 → cereal/msgq → 应用层通路畅通,再谈模型和控制。
openpilot 开源仓库地址:github.com/commaai/openpilot(https://github.com/commaai/openpilot)
你的车型在支持列表里吗?你愿意花 ¥8900 把旧车变成智驾车吗? 评论区聊聊------实操中遇到任何问题,我逐一回复。