导语 :你有没有想过,如果相机可以像创可贴一样贴在皮肤上,会怎样?不是戴在头上,不是拿在手里,而是像皮肤的一部分那样,随着手掌弯曲、扭转、拉伸,依然稳定成像。这听起来像科幻,但发表在《Nature Communications》上的一项研究做到了。来自清华大学方璐团队开发了一套名为SkinSight的贴肤成像系统------将多个高像素微型相机嵌入柔性基底,像皮肤一样贴在手掌心,让使用者"看到"被遮挡的物体,并实时完成三维重建。这不仅是可穿戴电子的一次形态突破,更重新定义了"相机"与身体的关系。
一、背景与痛点:高像素与可变形,为何不可兼得?
阵列成像系统的核心价值在于空间分布------多个相机从不同视角同时采集信息,可以获得比单一相机更丰富的场景几何和遮挡关系。从自动驾驶的多摄像头方案到电影特效中的动作捕捉,阵列成像无处不在。
但当载体从刚性平台变成人体皮肤或软体机器人时,一道难以逾越的鸿沟出现了。
在现有技术体系中,高像素成像与柔性形变几乎是一对互斥属性。刚性相机阵列 (如手机多摄、自动驾驶传感器)分辨率高、成像质量好,但依赖刚性背板,无法贴合动态形变表面。柔性视觉传感器(如基于量子点或有机半导体的器件)虽然可以拉伸弯曲,但受限于制造工艺,总像素数极低(通常不到1K像素),根本无法支撑高保真机器视觉任务。即便是有一定灵活性的非结构化相机阵列,也主要是为刚性平台内部的相机重新排列而设计,而非为了贴合软表面。
核心矛盾在于:想要高像素,就必须保持刚性;想要柔性,就必然损失分辨率。 过去的技术路线,总是在"高像素"和"可变形"之间做取舍------选一个就得放弃另一个。
SkinSight的解题思路另辟蹊径:为什么非得让成像元件本身也变软?
二、核心创新:从"像素级柔性"到"节点级刚柔解耦"
SkinSight提出了一个与传统柔性电子截然不同的设计哲学------刚性-柔软混合架构,实现了硬件与算法的双重突破。
硬件层:刚性做"眼",柔性做"筋"
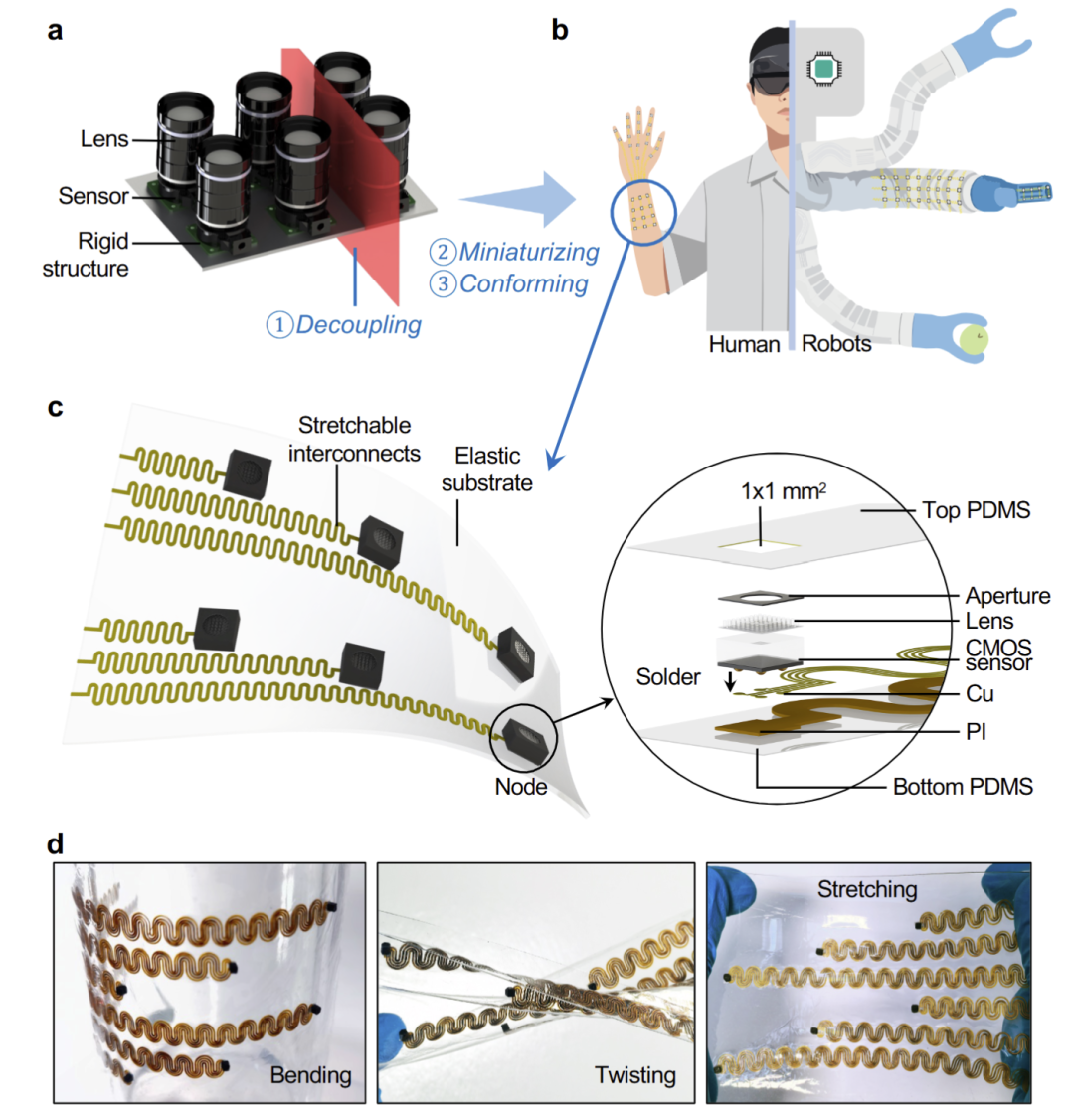
系统不再追求单个像素的柔性,而是将高密度CMOS成像芯片作为刚性节点 ,用可拉伸蛇形导线连接节点,整体封装在弹性基底中。刚性芯片负责高性能成像,柔性导线负责吸收形变应力。
具体而言,每个成像节点是一个OV6946 CMOS传感器,尺寸仅1×1 mm²,分辨率400×400即160K像素。多个节点组合后,阵列总分辨率可轻松达到百万像素量级------这是传统柔性视觉系统无法企及的水平。顶部集成由氮化硅纳米柱构成的超薄透镜,厚度极薄,直径约200 μm。节点之间用激光图案化的蛇形铜导线连接,线宽0.2 mm,间距0.5 mm,封装在PDMS弹性体中。这种蛇形几何结构可以像弹簧一样有效分散拉伸、弯曲和扭转产生的应变。每个成像节点被置于"零应变刚性岛"中,传感器上方开窗保证光路,整体由PDMS封装保护,防止焊点开裂。
这套架构本质上是一次对物理约束的重新拆解:不是把"能弯"的属性强加给每一个组件,而是让会弯的弯、该硬的硬,在系统层面实现柔性与性能的兼得。
算法层:让视觉大模型"看懂"不断变化的相机位姿
硬件解决了"能贴"的问题,但带来了一个新难题:传统相机阵列做三维重建时,各相机之间的相对位置是固定的、预先标定好的。SkinSight贴在手上------手掌随时在动、在弯、在翻转------相机之间的位姿关系持续变化且没有预标定。固定标定算法全部失效。
研究团队的解决方案是形变自适应三维重建计算框架,采用双通路异步架构。
在线重建通路 将视频流按滑动窗口分块(每块30帧),利用视觉几何基础模型π3 直接从图像序列中回归出每帧的密集3D点云和相机位姿。不需要任何预标定,完全依靠图像内容本身推断相机之间的空间关系。相邻块间通过最小二乘配准拼接成全局坐标。异步高斯优化通路在后台利用密集点云作为初始化,执行3D高斯泼溅优化(1000次迭代),填补点云空洞,恢复连续表面和真实纹理,实现照片级渲染。
这一算法设计的意义在于:它彻底摆脱了传统阵列对刚性结构预标定的依赖。 相机之间的空间关系不再需要在硬件上固死,而是交给大模型从图像内容中实时推断。这种"软件定义几何"的思路,使贴肤成像从不可能变为可能。
关于绝对尺度的恢复:纯视觉重建存在尺度模糊问题(物体是真实大小还是微缩模型,仅从图像难以判断)。系统通过引入一个已知尺寸的参考物体(如红色盒子)来恢复公制尺度,这是一种实用且有效的工程方案,未来可集成IMU或微型深度传感器实现全自主度量。
三、性能验证:数据说话
SkinSight的性能经过了系统性的实验验证,涵盖信号稳定性、疲劳寿命、几何精度和动态追踪多个维度。
动态信噪比测试 :在形变状态下,动态信噪比达到38.67 dB ,静态信噪比42.83 dB。这表明信号传输在弯曲、拉伸过程中几乎不受影响。
疲劳寿命测试 :500次拉伸-压缩循环后,信噪比无衰减。蛇形互连和刚性岛结构在反复形变中能够可靠地维持图像信号的传输质量。实验在6.4 cm压缩、9.2 cm平展和11.6 cm拉伸三种状态间往复进行,每次机械周期包含1800帧图像采集。
几何精度验证 :8类桌面物体的三维包围盒测量,平均尺寸误差仅1.52%。对于一个持续形变、无预标定的柔性相机阵列而言,这一精度已满足多数工程应用需求。
动态追踪精度 :系统追踪传送带上的向日葵装饰物,视觉估计速度为1.669 cm/s,与机械设定速度1.666 cm/s相比,误差仅约0.18%。
增强现实叠加:系统可在约50秒内生成三维点图提供快速几何反馈,约80秒内完成Gaussian表面优化补全纹理细节。两种输出互补,构成了从"快速感知"到"精细理解"的完整视觉管线。
四、从技术指标到应用想象:当手掌变成"透视眼"
SkinSight最令人印象深刻的应用演示是掌心遮挡场景探索实验。
一个不透明盒子遮挡了用户的视线和头戴相机。用户将贴有SkinSight的手掌从狭窄开口伸入盒内。系统实时重建盒内物体的三维结构,并通过AR眼镜将重建结果叠加到用户视野中。用户可以像拥有"透视"能力一样,看到自己手掌"摸"到的物体轮廓、位置和纹理。
这展示了一种全新的人机视觉交互范式:手掌不再是被动的肢体末端,而是一个可移动、可定向、可探索的主动视觉接口。 在狭窄空间检修、灾难废墟搜救、医疗内窥探查等场景中,这种"哪里看不见就伸手去哪里"的能力,比固定相机更灵活,比手持设备更符合直觉。同样的原理也可以应用于软体机器人------贴在软体机械手上,克服刚性RGB-D相机因遮挡导致的盲区,实现无死角感知。
五、横向对比:SkinSight强在哪?
| 维度 | 传统柔性视觉系统 | 非结构相机阵列 | SkinSight(本文) |
|---|---|---|---|
| 像素/节点 | <1K | 数百万 | 160K/节点,可扩展至百万像素量级 |
| 形变能力 | 可拉伸 | 固定/可旋转 | 可拉伸、弯曲 |
| 制造工艺 | 实验室转移印刷 | 商业相机组装 | 工业级FPC+SMT,可量产 |
| 数据读出 | 行列矩阵(大量引线) | 同轴线/存储卡 | 4线串行(极简) |
| 标定需求 | 需预标定 | 需预标定 | 无需预标定,算法自适应 |
SkinSight在每个维度上都找到了传统方案的痛点并给出了针对性解法。它首次将商用高密度CMOS成功集成到可拉伸表皮电子中,实现了分辨率的跨越式提升。工业级FPC+SMT工艺保证了可量产性和可靠性。算法侧利用视觉几何基础模型彻底摆脱了预标定依赖,兼具通用性和鲁棒性。
六、局限与展望
尽管SkinSight的突破意义明确,以下几个局限也值得客观讨论。
实时性瓶颈:当前处理速度约2秒/数据块,受限于未优化的PyTorch推理。对于需要毫秒级反馈的应用场景,仍有显著的加速空间------这是工程优化问题,而非原理性缺陷。
机械薄弱点:焊点是刚性节点与柔性导线之间的界面,也是应力集中区域。长期反复形变下,焊点疲劳是影响使用寿命的关键因素,未来需优化刚性-柔性界面设计。
尺度恢复依赖外部参考:当前系统通过已知尺寸的参考物体恢复公制尺度,在无法放置参考物的场景中,尺度模糊问题依然存在。未来可通过集成IMU或微型深度传感器实现全自主度量。
但从更宏观的视角看,SkinSight的价值远超当前的指标数字。它将柔性视觉的技术路线从"像素级柔性化"转向了"节点级刚柔解耦"------高像素CMOS负责成像质量,柔性互连和软基底负责承受形变,计算框架负责处理不断变化的相机位姿。这条路线巧妙避开了柔性像素阵列在分辨率和读出线路上的制备瓶颈,也摆脱了传统相机阵列对刚性支架的依赖。
更重要的是,它正在重新定义"相机"与"身体"的关系。传统相机是身体之外的设备------你拿起它、戴上它、架好它。SkinSight则让相机变成了身体的一部分------它随你而动,感知你所触及却无法直视的空间。这种"皮肤即视觉"的概念,或许会深刻影响下一代人机交互界面的形态。
当相机学会了皮肤的柔软,人也学会了新的看世界的方式。
论文信息
-
标题
:Skin-mounted camera array for occluded scene perception and 3D reconstruction
-
期刊
:Nature Communications
-
核心技术
:刚性嵌入柔性的贴肤相机阵列 + 形变自适应三维重建计算框架
-
关键指标
:单节点160K像素,阵列可扩展至百万像素量级;500次拉伸-压缩循环后信噪比保持42.83 dB;桌面物体三维测量平均误差1.52%;动态测速与机械设定偏差<0.2%