一. launch简介
回忆下之前博客中所构造的文件
ROS工作空间、功能包、节点创建_创建自己的功能包与节点-CSDN博客
ROS2自定义接口消息、参数服务案例_ros2自定义通信借口-CSDN博客
ROS2质量服务策略Qos & 时间相关API-CSDN博客
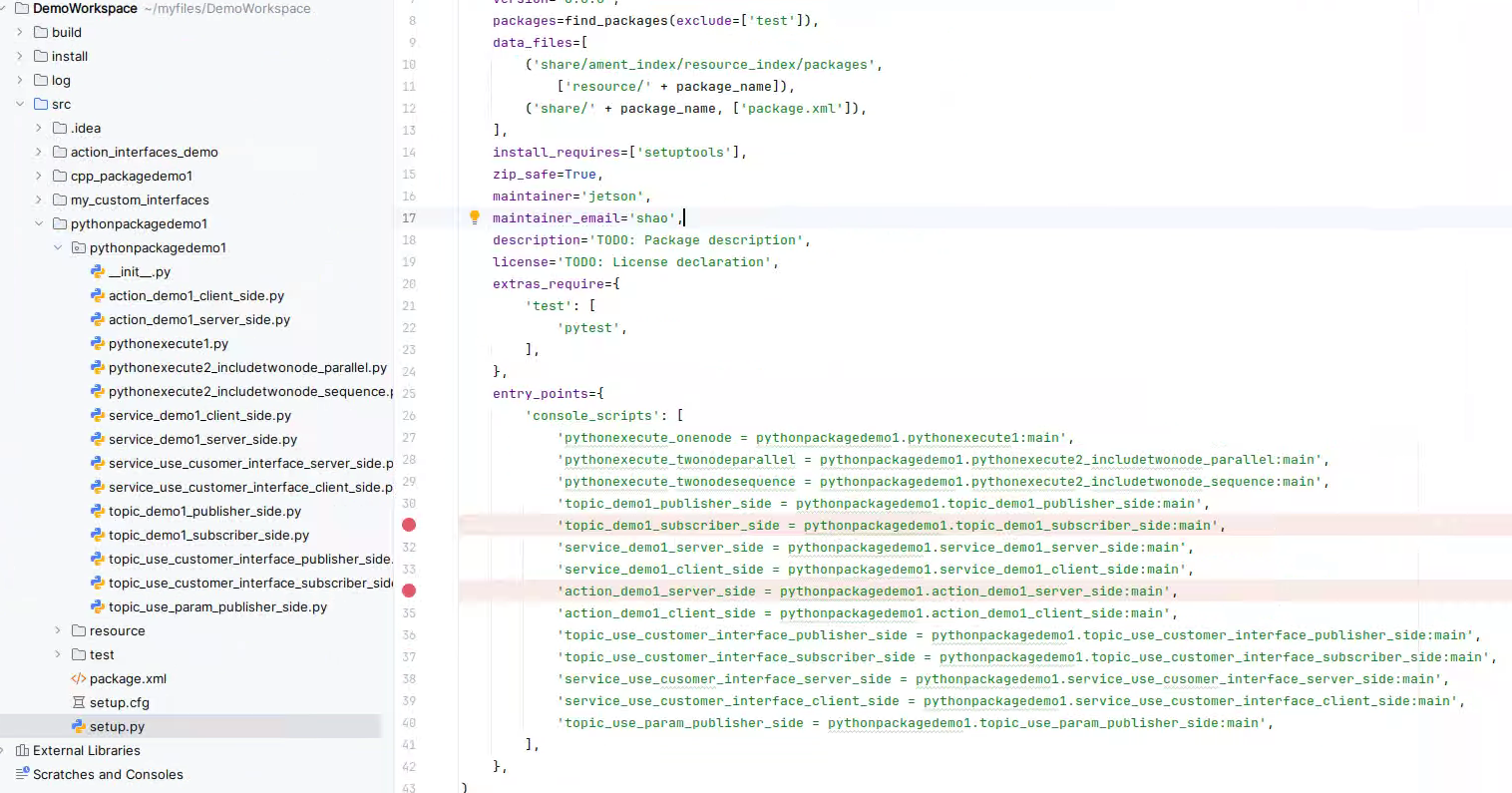
编译后,想要启动包里的含有节点的可执行程序,则要命令行一条条执行,比如执行如下几个:
ros2 run pythonpackagedemo1 topic_demo1_publisher_side
ros2 run pythonpackagedemo1 topic_demo1_subscriber_side
ros2 run pythonpackagedemo1 pythonexecute_onenode 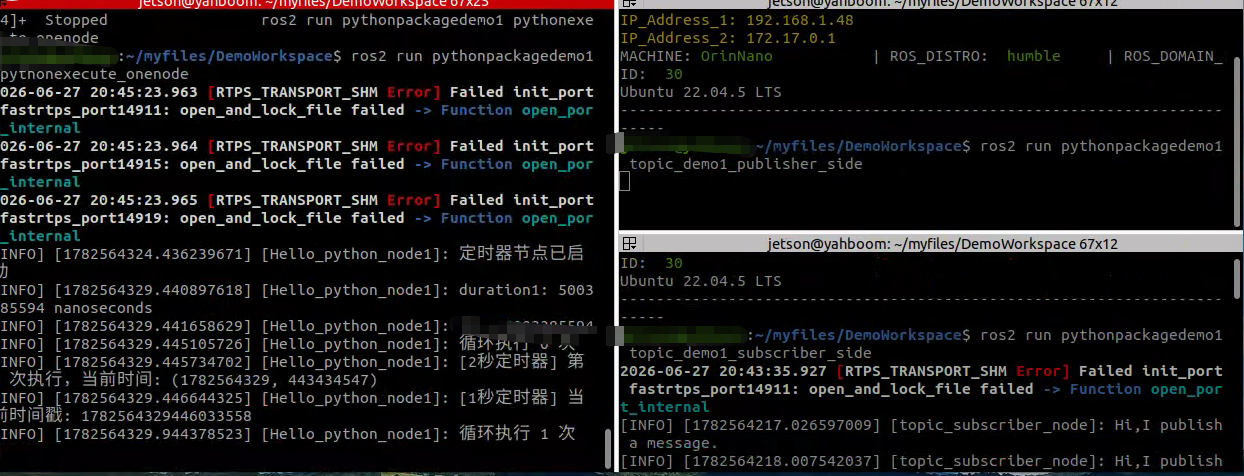
但这样太麻烦了,我们需要寻找一种批量打开各程序的方法,那就是Launch启动文件,它是ROS系统中多节点启动与配置的一种脚本。
ROS2 Launch 用于批量启动节点、设置参数、配置命名空间、加载硬件驱动,替代多条独立ros2 run命令,支持多种文件格式:
Python launch 文件(最灵活,可写逻辑判断)
XML launch 文件(简洁,适合简单启动流程)
YAML launch 文件(轻量化,仅基础启动)
二. launch文件编写(py文件)
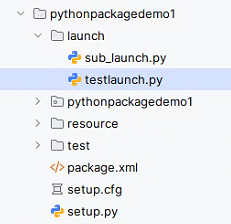
拿pythonpackagedemo1包做实验,在该包下新建一个文件夹launch, 然后在launch文件夹内新建两个py文件testlaunch.py和sub_launch.py。testlaunch.py文件里会嵌套启用另一个sub_launch.py。
testlaunch.py文件中代码如下:
python
from launch import LaunchDescription
from launch_ros.actions import Node
import os
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from ament_index_python.packages import get_package_share_directory
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
def generate_launch_description():
################################### 本launch文件运行程序所用参数 ##############################################################################################
# 1. 先声明本launch参数
arg_name = DeclareLaunchArgument("arg_name", default_value="to_onenode")
# 2. 创建本launch参数占位对象
name = LaunchConfiguration("arg_name")
################################## 子launch文件运行程序所用参数 ##################################################################################################
# 先声明子launch参数
arg_publish_name = DeclareLaunchArgument("arg_publish_name", default_value="to_publish_node", description="")
arg_subscribe_name = DeclareLaunchArgument("arg_subscribe_name", default_value="to_subscribe_node", description="")
# 创建子launch参数占位对象
publish_name = LaunchConfiguration("arg_publish_name") #由于后面调子节点时要用,这边要加载
subscribe_name = LaunchConfiguration("arg_subscribe_name")
#嵌套子launch,并把参数传递给子launch ==========
child_launch = IncludeLaunchDescription(PythonLaunchDescriptionSource(
[os.path.join(get_package_share_directory('pythonpackagedemo1'), 'launch'),
'/sub_launch.py']),
# 将当前launch的参数转发给子launch
launch_arguments={
"arg_publish_name": publish_name, #使用时用占位符名字
"arg_subscribe_name": subscribe_name #使用时用占位符名字
}.items()
)
######################################################################################################################################################################
#当前launch加载的可执行程序
node1 = Node(
package='pythonpackagedemo1', # 包名
executable='pythonexecute_onenode', # 可执行程序文件名
name = "tmpnodename", # 节点重命名
output='screen', # 日志打印到终端
# 把参数作为ROS参数传入节点内部
parameters=[
{"arg_name": name},
],
)
return LaunchDescription([
arg_name, #调用程序时要传参
arg_publish_name,
arg_subscribe_name,
node1,
child_launch
])sub_launch.py中代码如下:
python
from launch import LaunchDescription
from launch_ros.actions import Node
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
#子launch文件
def generate_launch_description():
# 接收父launch传递的两个参数
# 1. 先声明参数
arg_publish_name = DeclareLaunchArgument("arg_publish_name", default_value="to_publish_node", description="")
arg_subscribe_name = DeclareLaunchArgument("arg_subscribe_name", default_value="to_subscribe_node", description="")
# 2. 创建参数占位对象
publish_name = LaunchConfiguration("arg_publish_name")
subscribe_name = LaunchConfiguration("arg_subscribe_name")
#接下来使用,第1可以赋值给节点名称、命名空间
# Node(
# name=publish_name,
# namespace=subscribe_name
# )
#接下来使用,第2拼接动态话题名(不能用 f-string,必须列表拼接)
# remappings = [
# ["/topic_demo1", "/robot_", topic_suffix]
# 接下来使用,第3作为 ROS 参数传入节点内部
# parameters = [
# {"robot_name": robot_name},
# {"suffix": topic_suffix}
# ]
#
# 接下来使用,第4传递给子 launch 文件
# IncludeLaunchDescription(
# PythonLaunchDescriptionSource(sub_launch_path),
# launch_arguments={
# "robot_name": robot_name
# }.items()
# )
nod_pub = Node(
package='pythonpackagedemo1', # 包名
executable='topic_demo1_publisher_side', # 可执行程序文件名
output='screen', # 日志打印到终端
parameters=[{"arg_publish_name": publish_name}], #使用时用占位符名字
remappings=[("/topic_demo1", "/topic_changed")]
)
nod_sub = Node(
package='pythonpackagedemo1', # 包名
executable='topic_demo1_subscriber_side', # 可执行程序文件名
output='screen', # 日志打印到终端
parameters=[{"arg_subscribe_name": subscribe_name}], #使用时用占位符名字
remappings=[("/topic_demo1", "/topic_changed")]
)
return LaunchDescription([
arg_publish_name, #调用应用程序,传参
arg_subscribe_name,
nod_pub,
nod_sub
])launch文件中的一些格式等要求,在上面的代码中都有注释说明
我们再去修改下启动的py文件中的代码
第1个是pythonexecute1.py, 增加了打印launch方式传进来的参数:
python
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import time
import threading
from rclpy.time import Time
from rclpy.duration import Duration
"""
创建一个py_hello节点
"""
class pyHelloNode1(Node):
def __init__(self, name):
super().__init__(name)
# 声明需要读取的参数(必须声明,否则读不到)
# 参数名 和 launch 里的 key 保持一致,第二个是默认值
self.declare_parameter("arg_name", "hi,pub")
# 读取参数值
# 字符串参数 .string_value
show = self.get_parameter("arg_name").value
#show = self.get_parameter("arg_name").get_parameter_value().string_value
# # 整数
# int_val = self.get_parameter("num").get_parameter_value().integer_value
# # 浮点数
# float_val = self.get_parameter("rate").get_parameter_value().double_value
# # 布尔
# bool_val = self.get_parameter("enable").get_parameter_value().bool_value
# 打印验证
self.get_logger().info(f"读取到launch传入参数arg_name: {show}")
# 计数器,用于演示定时器执行次数
self.counter = 0
# 创建定时器:每1秒执行一次callback函数
self.timer = self.create_timer(2.0, self.timer_callback)
# 创建一个更快的定时器:每2秒执行一次
self.fast_timer = self.create_timer(1.0, self.fast_timer_callback)
self.get_logger().info("定时器节点已启动")
def get_time(self):
return self.get_clock().now()
def timer_callback(self):
"""2秒定时器回调函数"""
self.counter += 1
current_time = self.get_clock().now()
# 打印当前时间和计数器值
self.get_logger().info(
f"[2秒定时器] 第 {self.counter} 次执行,当前时间: {current_time.seconds_nanoseconds()}")
def fast_timer_callback(self):
"""1秒定时器回调函数"""
# 打印当前时间戳(纳秒)
self.get_logger().info(
f"[1秒定时器] 当前时间戳: {self.get_clock().now().nanoseconds}")
# ROS2节点父类初始化
# while rclpy.ok(): # ROS2系统是否正常运行
# self.get_logger().info("Hello python node1") # ROS2日志输出
# time.sleep(0.5) # 休眠控制循环时间
def run_loop(self):
# 使用节点的create_rate()创建2Hz的Rate
rate = self.create_rate(2)
count = 0
try:
while rclpy.ok():
self.get_logger().info(f"循环执行 {count} 次")
count += 1
rate.sleep() # 休眠到下一个周期(0.5秒)
except KeyboardInterrupt:
self.get_logger().info("循环被中断")
def main(args=None):
# ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = pyHelloNode1("Hello_python_node1") # 创建ROS2节点对象并进行初始化
# time类的使用方法,创建'时间点、时刻'
time1_demo = Time(seconds=1)
current_time = node.get_time()
time.sleep(5)
duration1 = node.get_time() - current_time
t2 = time1_demo + duration1
node.get_logger().info(f'duration1: {duration1}')
node.get_logger().info("t2 = %d" % t2.nanoseconds)
# 创建线程运行循环(避免阻塞主线程)
loop_thread = threading.Thread(target=node.run_loop)
loop_thread.start()
# 主线程执行spin,维持ROS 2节点运行
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
finally:
loop_thread.join() # 等待线程结束
node.destroy_node()
rclpy.shutdown()第2个是topic_demo1_publisher_side.py,里面的代码如下:
python
# 导入rclpy库
import rclpy
from rclpy.node import Node
# 导入String字符串消息
from std_msgs.msg import String
# 导入QoS相关类
from rclpy.qos import QoSProfile, QoSReliabilityPolicy, QoSHistoryPolicy
# 创建一个继承于Node基类的子类
class Topic_Pub(Node):
def __init__(self, name):
super().__init__(name)
# 声明需要读取的参数(必须声明,否则读不到)
# 参数名 和 launch 里的 key 保持一致,第二个是默认值
self.declare_parameter("arg_publish_name", "hi,pub")
# 读取参数值
# 字符串参数 .string_value
show = self.get_parameter("arg_publish_name").value
# 打印验证
self.get_logger().info(f"读取到launch传入参数 rg_publish_name: {show}")
# 1. 配置QoS策略:可靠传输,保留最后1条历史数据
self.qos_profile = QoSProfile(
reliability=QoSReliabilityPolicy.BEST_EFFORT, # 可靠传输(重传丢失数据)
history=QoSHistoryPolicy.KEEP_LAST, # 保留最后N条数据
depth=1 # 保留1条历史数据
)
# 参数含义: 消息类型, "话题名", 消息队列长度
self.pub = self.create_publisher(String, "/topic_demo1", self.qos_profile)
#self.create_timer(1.0, self.timer_callback)
#意思:每隔1秒执行一次timer_callback
self.timer = self.create_timer(1, self.pub_msg)
def pub_msg(self):
msg = String() # 创建一个String类型的变量msg
msg.data = "Hi,I publish a message." # 给msg里边的data赋值
self.pub.publish(msg) # 发布话题数据
# 主函数
def main(args=None):
rclpy.init() # 初始化
pub_demo = Topic_Pub("topic_publisher_node")
rclpy.spin(pub_demo)
pub_demo.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口第3个是topic_demo1_subscriber_side.py文件
python
#导入相关的库
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
from rclpy.qos import QoSProfile, QoSReliabilityPolicy, QoSHistoryPolicy
class Topic_Sub(Node):
def __init__(self,name):
super().__init__(name)
#self.create_subscription(
# msg_type, # 1. 消息类型(必须)
# topic, # 2. 话题名称(必须)
# callback, # 3. 收到消息后的回调函数(必须)
# qos_profile, # 4. 队列长度(必须)
# callback_group=None, # 5. 回调组(可选)
#)
# 4个必须参数(你写代码必写)
# msg_type 消息类型,如String、Image、LaserScan
# topic 话题名字字符串,如"my_topic"
# callback 收到消息后自动调用的函数
# qos_profile队列长度,一般写10
# 声明需要读取的参数(必须声明,否则读不到)
# 参数名 和 launch 里的 key 保持一致,第二个是默认值
self.declare_parameter("arg_subscribe_name", "hi,sub")
# 绑定参数变更回调函数
self.add_on_set_parameters_callback(self.param_callback)
# 读取参数值
# 字符串参数 .string_value
show = self.get_parameter("arg_subscribe_name").value
# 打印验证
self.get_logger().info(f"读取到launch传入参数 rg_publish_name: {show}")
# 1. 配置与发布者兼容的QoS策略
self.qos_profile = QoSProfile(
reliability=QoSReliabilityPolicy.BEST_EFFORT,
history=QoSHistoryPolicy.KEEP_LAST,
depth=1
)
self.sub = self.create_subscription(String,"/topic_demo1",self.sub_callback,self.qos_profile)
def param_callback(self, params):
for param in params:
if param.name == "arg_subscribe_name":
self.get_logger().info(f"参数更新:{param.string_value}")
return rclpy.parameter.ParameterSetResult.SUCCESS
def sub_callback(self,msg):
# print(msg.data,flush=True)
self.get_logger().info(msg.data)
def main(args=None):
rclpy.init()
sub_demo = Topic_Sub("topic_subscriber_node") # 创建对象并进行初始化
rclpy.spin(sub_demo)
sub_demo.destroy_node() #销毁节点对象
rclpy.shutdown() #关闭ROS2 Python接口三. 2种运行方式
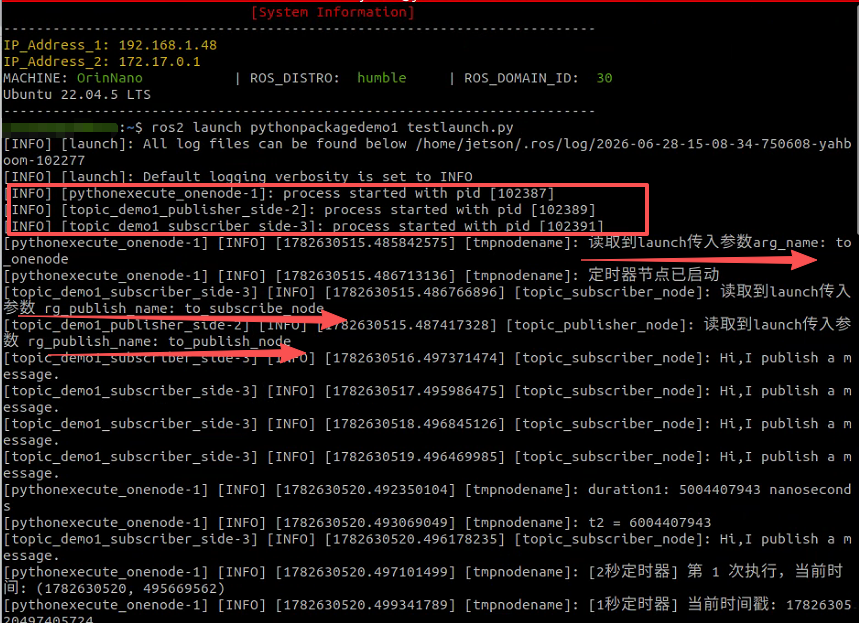
1. 使用默认参数启动
由于launch.py文件中,都有写默认参数,故可直接运行
python
ros2 launch pythonpackagedemo1 testlaunch.py可看到三个可执行程序运行起来了,同时如下默认参数传进来了
2. 命令行自定义传参
python
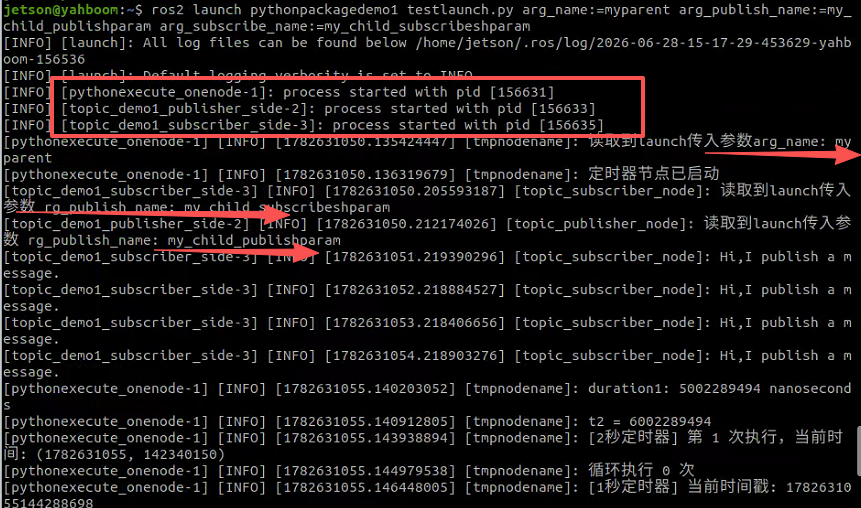
ros2 launch pythonpackagedemo1 testlaunch.py arg_name:=myparent arg_publish_name:=my_child_publishparam arg_subscribe_name:=my_child_subscribeshparam可看到三个可执行程序运行起来了,同时命令行设置的参数传进来了
**注1:**查看所有可传入参数说明,可使用如下语句
python
ros2 launch pythonpackagedemo1 testlaunch.py --show-args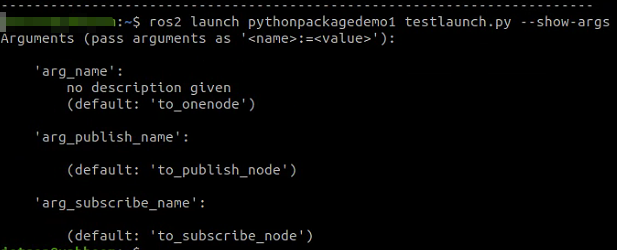
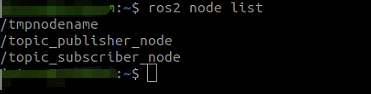
注2: 确认节点是否重命名了**(** 在testlaunch.py中对节点名字进行了修改,见代码注释,本来是Hello_python_node1**)**
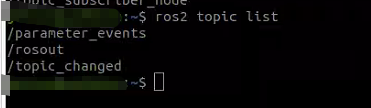
注3: 确认话题名字是否重映射了**(** 在子sub_launch.py中对话题做了名字映射**)**
至于使用xml文件和yaml文件方式实现批量运行可执行程序的方式,博主这边就不再介绍了。