在 ABB RAPID 编程中,RobTarget 是最常用的数据类型之一,用于保存机器人运动目标点的位置和姿态。
机器人执行 MoveJ 、MoveL 等运动指令时,目标点通常都是一个 RobTarget 数据。
一、什么是 RobTarget
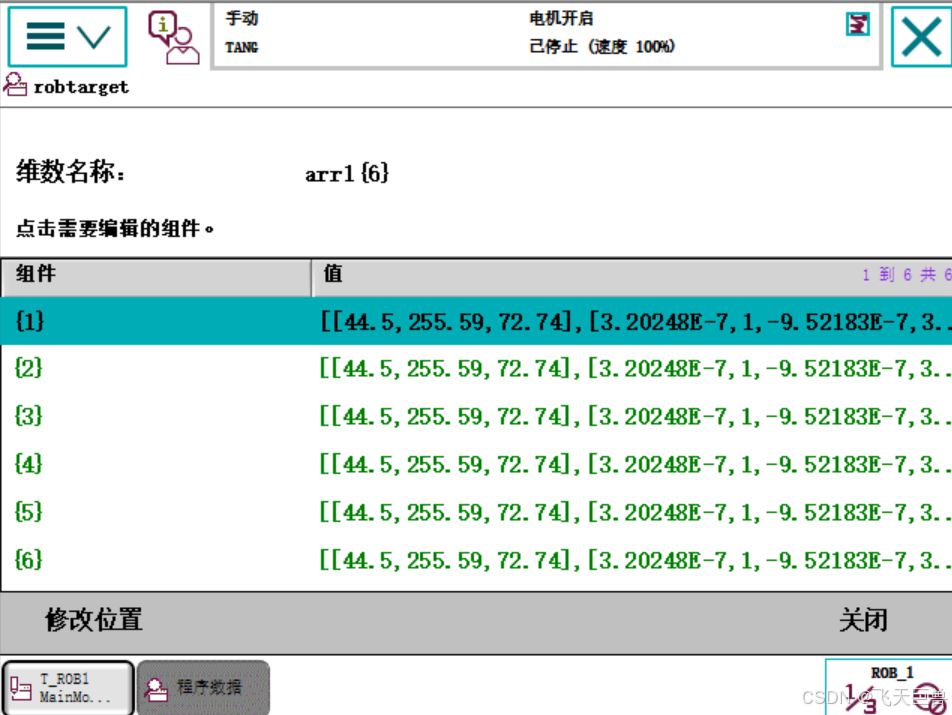
RobTarget(Robot Target) 表示机器人运动的目标位置,它不仅包含空间坐标,还包含工具姿态、机器人构型以及外部轴信息。
例如:
CONST robtarget pHome:=
[[500,0,600],
[1,0,0,0],
[0,0,1,0],
[9E9,9E9,9E9,9E9,9E9,9E9]];二、RobTarget 数据组成
一个完整的 RobTarget 主要由四部分组成:
robtarget
[
[X,Y,Z],
[Q1,Q2,Q3,Q4],
[CF1,CF4,CF6,CFX],
[EAX_A,EAX_B,EAX_C,EAX_D,EAX_E,EAX_F]
]1. 位置(Trans)
[X,Y,Z]表示机器人 TCP 的空间坐标,单位为 mm。
例如:
[500,0,600]表示:
-
X = 500 mm
-
Y = 0 mm
-
Z = 600 mm
2. 姿态(Rot)
[Q1,Q2,Q3,Q4]表示工具的姿态。
ABB 使用**四元数(Quaternion)**描述工具方向,系统会自动计算生成,一般无需手动修改。
3. 构型(ConfData)
[CF1,CF4,CF6,CFX]表示机器人关节构型。
主要用于保证机器人按照正确的姿态到达目标点,避免出现姿态翻转或绕远路。
通常保持系统默认即可。
4. 外部轴(ExtAx)
[EAX_A,EAX_B,EAX_C,EAX_D,EAX_E,EAX_F]用于记录外部轴的位置。
如果机器人没有配置外部轴,通常显示:
[9E9,9E9,9E9,9E9,9E9,9E9]表示当前未使用外部轴。
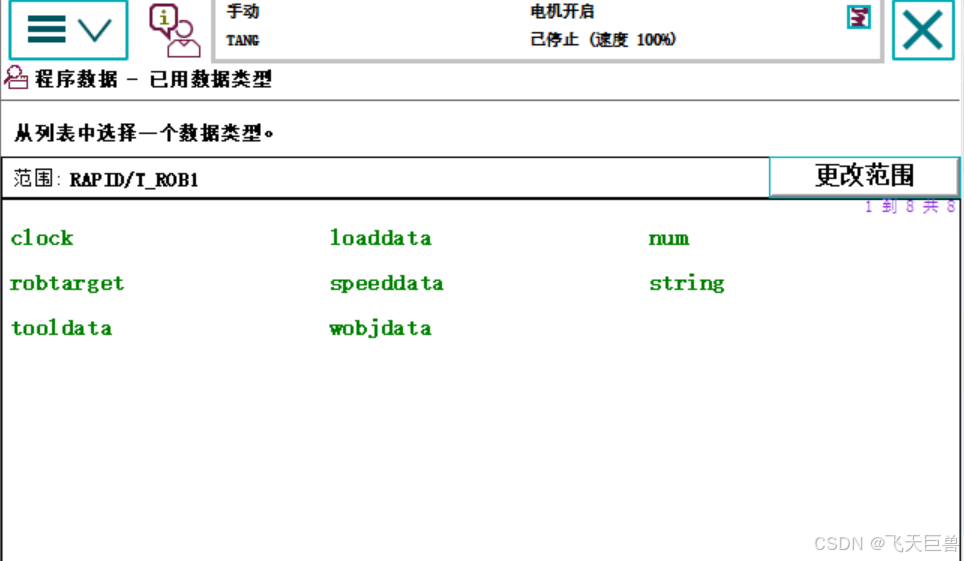
三、新建 RobTarget
除了示教自动生成外,也可以在程序数据中新建 RobTarget。
操作步骤
-
点击 程序数据。
-
点击 视图 → 全部数据类型。
-
选择 robtarget。
-
点击 新建。
-
输入变量名称并保存。

小结
RobTarget 是 ABB RAPID 编程中最重要的数据类型之一,用于保存机器人的目标点信息,包括位置、姿态、构型和外部轴数据。实际项目中,通常通过示教或程序数据创建 RobTarget,再配合 MoveJ 、MoveL 、Offs() 等运动指令完成机器人的轨迹规划和点位控制。