文章目录
-
- 每日一句正能量
- 一、前言:当具身智脑遇上"千机变"
- 二、技术架构与核心概念
-
- [2.1 具身智能三层架构与鸿蒙映射](#2.1 具身智能三层架构与鸿蒙映射)
- [2.2 自适应形态引擎的设计哲学](#2.2 自适应形态引擎的设计哲学)
- [2.3 跨设备交互的鸿蒙方案](#2.3 跨设备交互的鸿蒙方案)
- 三、项目实战:「千机变」架构设计
-
- [3.1 应用场景与功能规划](#3.1 应用场景与功能规划)
- [3.2 项目结构](#3.2 项目结构)
- 四、核心组件实战
-
- [4.1 窗口沉浸与跨设备接续配置(EntryAbility.ets)](#4.1 窗口沉浸与跨设备接续配置(EntryAbility.ets))
- [4.2 形态光效系统(MorphLightEffect.ets)](#4.2 形态光效系统(MorphLightEffect.ets))
- [4.3 形态悬浮导航(MorphFloatNavigation.ets)](#4.3 形态悬浮导航(MorphFloatNavigation.ets))
- [4.4 分布式同步服务(DistributedSync.ets)](#4.4 分布式同步服务(DistributedSync.ets))
- [4.5 具身智能体核心(EmbodiedAgent.ets)](#4.5 具身智能体核心(EmbodiedAgent.ets))
- [4.6 形态适配引擎(MorphEngine.ets)](#4.6 形态适配引擎(MorphEngine.ets))
- 五、多窗口形态监控与跨设备协同
- 六、关键技术总结
-
- [6.1 悬浮导航适配清单](#6.1 悬浮导航适配清单)
- [6.2 跨设备交互最佳实践](#6.2 跨设备交互最佳实践)
- [6.3 具身智能体设计原则](#6.3 具身智能体设计原则)
- 七、调试与测试建议
- 八、总结与展望
每日一句正能量
好的生活不是拼命透支、昙花一现,而是朝着内心的方向款款而行。
持久比绚烂更重要。追求爆发式的高光时刻,容易把自己耗尽。好的生活像散步,方向明确,步子不快不慢,能一直走下去,沿途还有风景。
一、前言:当具身智脑遇上"千机变"
2026年,华为在HDC开发者大会上发布了盘古具身智能CloudRobo 平台,明确华为云不做机器人终端,而是通过R2C(Robot 2 Cloud)协议与合作伙伴共同构建具身智能生态。与此同时,HarmonyOS 6(API 23)带来的毫秒级跨设备协作 与HMAF鸿蒙智能体框架,让"一个智能体大脑,千种物理形态"的愿景从科幻走向现实。
在具身智能领域,2025-2026年正经历从"单点演示"向"系统落地"的关键跨越。通用具身大模型通过VLA(Vision-Language-Action)架构与跨本体泛化技术,初步实现了从感知到执行的端到端闭环。然而,一个核心挑战始终悬而未决:如何让同一个智能体"大脑"在不同物理载体(无人机、机械臂、无人车、仿生机器人)之间无缝切换,并在PC端实现统一操控与跨设备交互?
这正是「千机变」平台要解决的核心命题。本文将基于HarmonyOS 6(API 23)的悬浮导航 、沉浸光感 与HMAF智能体框架,实战开发一款PC端自适应智能体形态引擎,实现:
- 形态自适应UI引擎:根据当前激活的物理形态(飞行/抓取/移动/仿生),PC端UI自动重构布局、控件与交互范式
- 跨设备形态流转:通过分布式软总线,智能体状态可在手机、平板、PC、智慧屏之间无缝接续
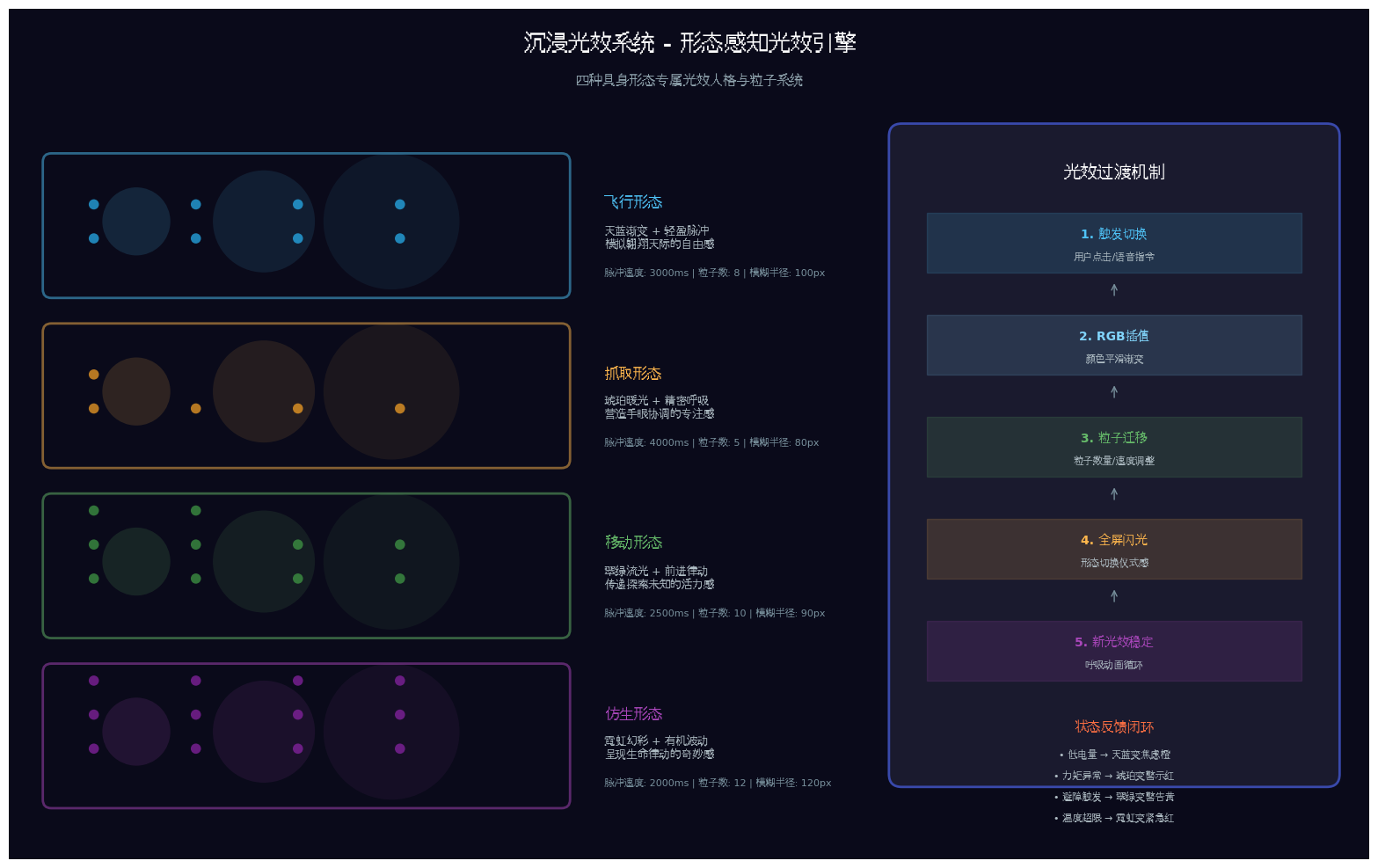
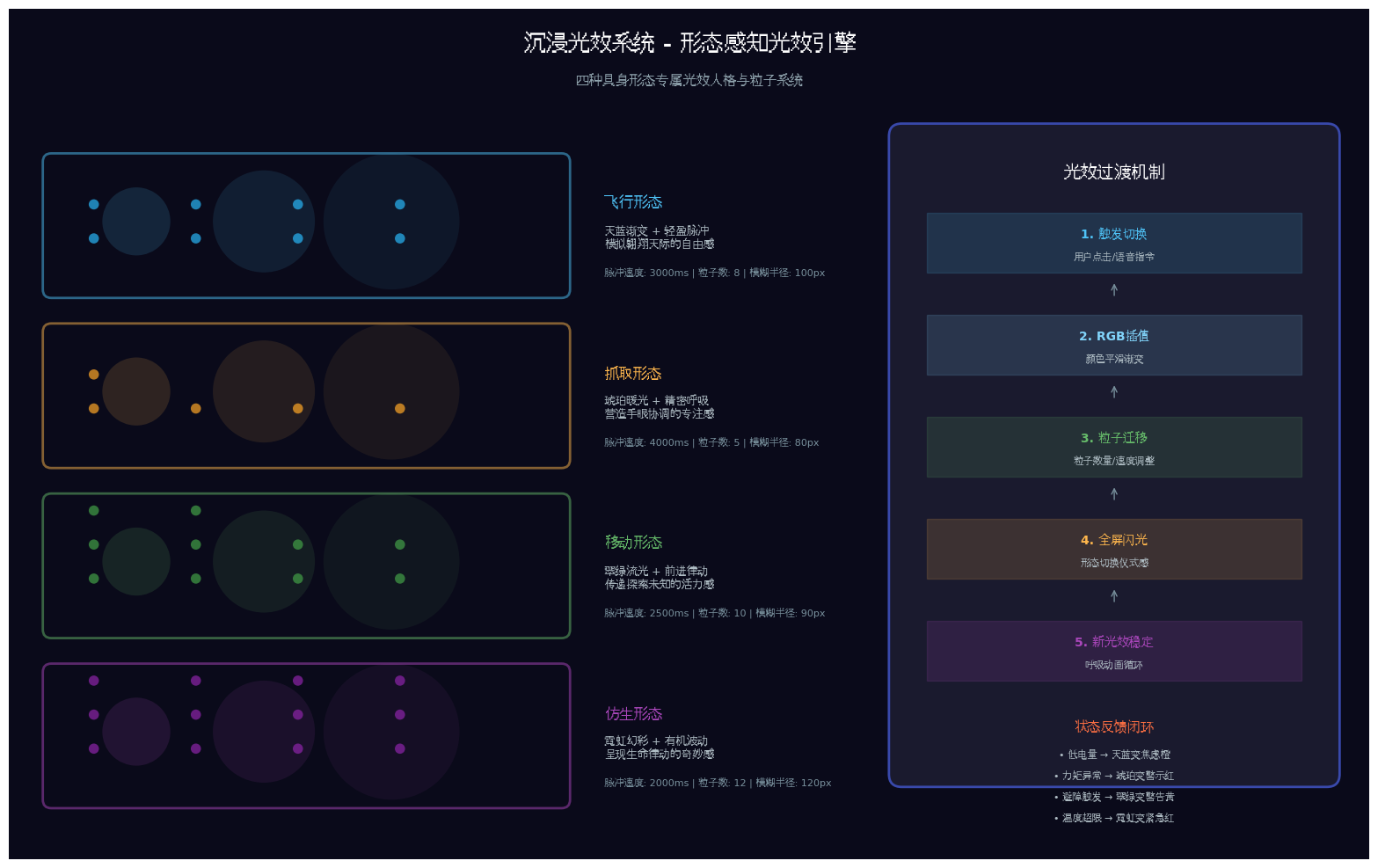
- 形态感知沉浸光效:每种物理形态拥有专属光效人格,通过颜色心理学强化操作直觉
- HMAF意图驱动编排:基于鸿蒙智能体框架,支持自然语言操控形态切换(如"切换到飞行模式")
- 多窗口协同监控:PC端主控窗口 + 浮动传感器面板 + 浮动3D预览 + 浮动环境地图的四层架构
本文核心创新点 :与此前所有文章不同,「千机变」首次将自适应形态引擎 与跨设备交互深度融合,不是简单地在PC端显示数据,而是让PC成为"千机百变"的指挥中枢------一个界面,万种形态,无缝切换。
二、技术架构与核心概念
2.1 具身智能三层架构与鸿蒙映射
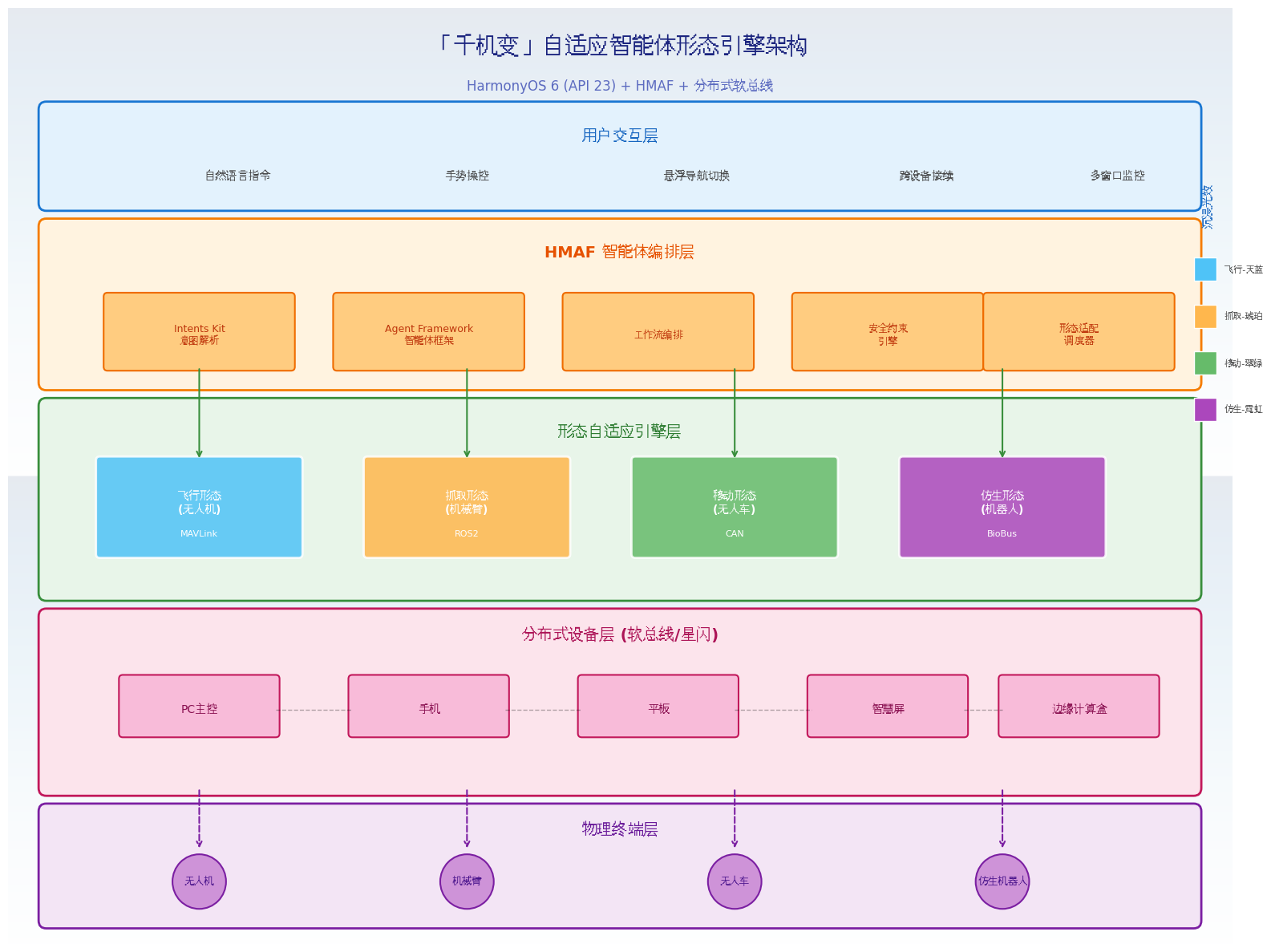
具身智能的核心架构包含感知层、决策层、执行层。HarmonyOS 6的分布式架构天然契合这一分层:
- 感知层:通过分布式软总线汇聚多设备传感器数据(摄像头、激光雷达、IMU、力矩传感器)
- 决策层:HMAF提供系统级智能体能力,支持LLM推理、工作流编排、多Agent协同
- 执行层:利用鸿蒙元服务轻量特性,将控制指令下发至各类终端执行器
在「千机变」中,我们引入了第四层------形态自适应层(Morph Adaptation Layer)。当智能体从"无人机形态"切换至"机械臂形态"时,不仅控制指令集变化,整个PC端UI界面、交互范式、光效氛围、甚至窗口布局都随之"变身"。
2.2 自适应形态引擎的设计哲学
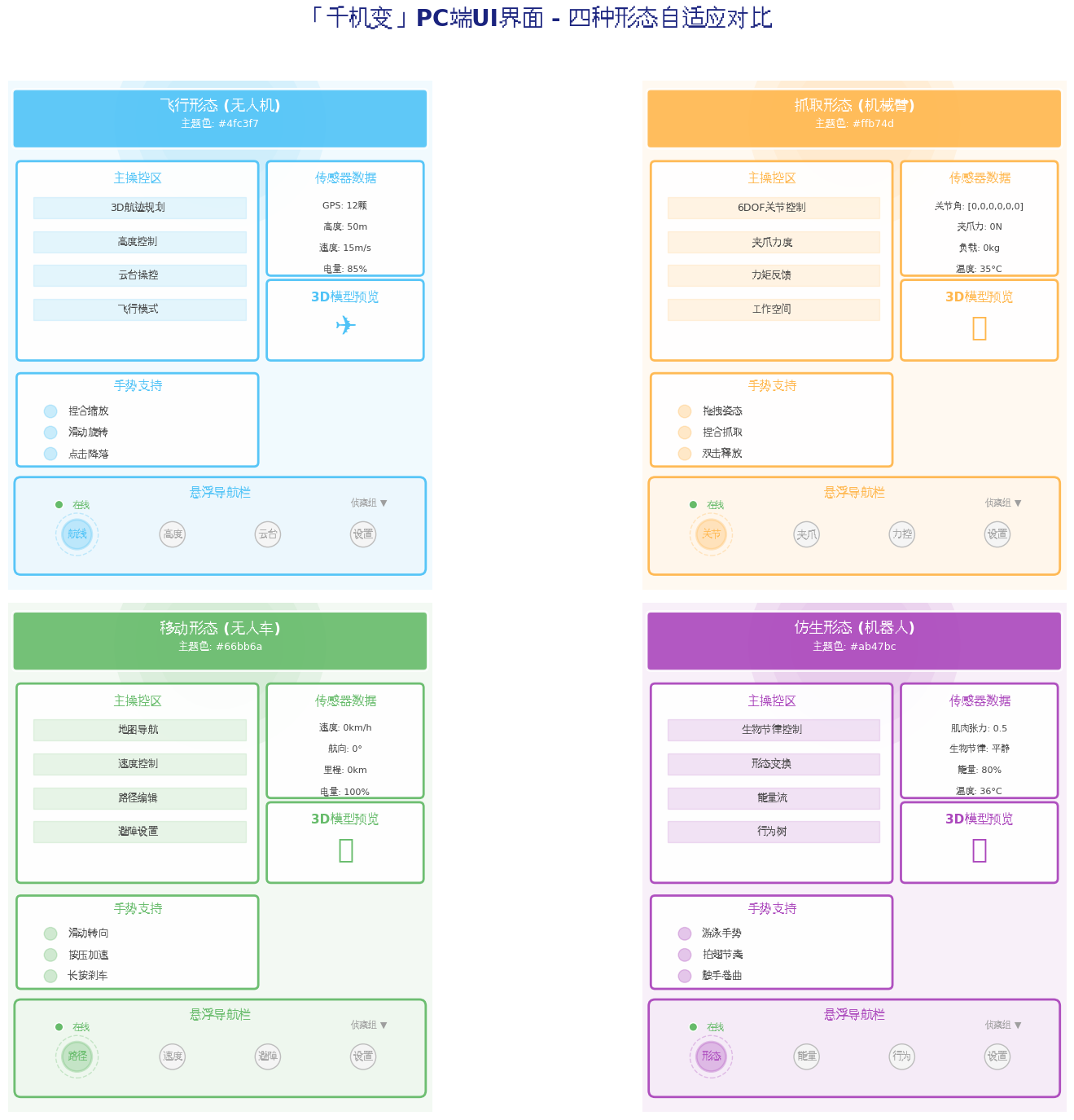
传统多设备适配采用"响应式布局"思路------同一套UI在不同屏幕尺寸间缩放。而「千机变」的自适应形态引擎采用"形态即界面"的范式:
- 飞行形态:PC端呈现3D航迹规划界面,悬浮导航变为"航线/高度/云台"三页签,光效为天蓝色
- 抓取形态:PC端呈现6DOF关节控制界面,悬浮导航变为"关节/夹爪/力控"三页签,光效为琥珀色
- 移动形态:PC端呈现地图导航界面,悬浮导航变为"路径/速度/避障"三页签,光效为翠绿色
- 仿生形态:PC端呈现生物节律控制界面,悬浮导航变为"形态/能量/行为"三页签,光效为霓虹紫
这种设计不是简单的主题切换,而是基于形态能力的UI重构------每种形态拥有独立的控件映射、手势支持、安全约束和传感器面板。
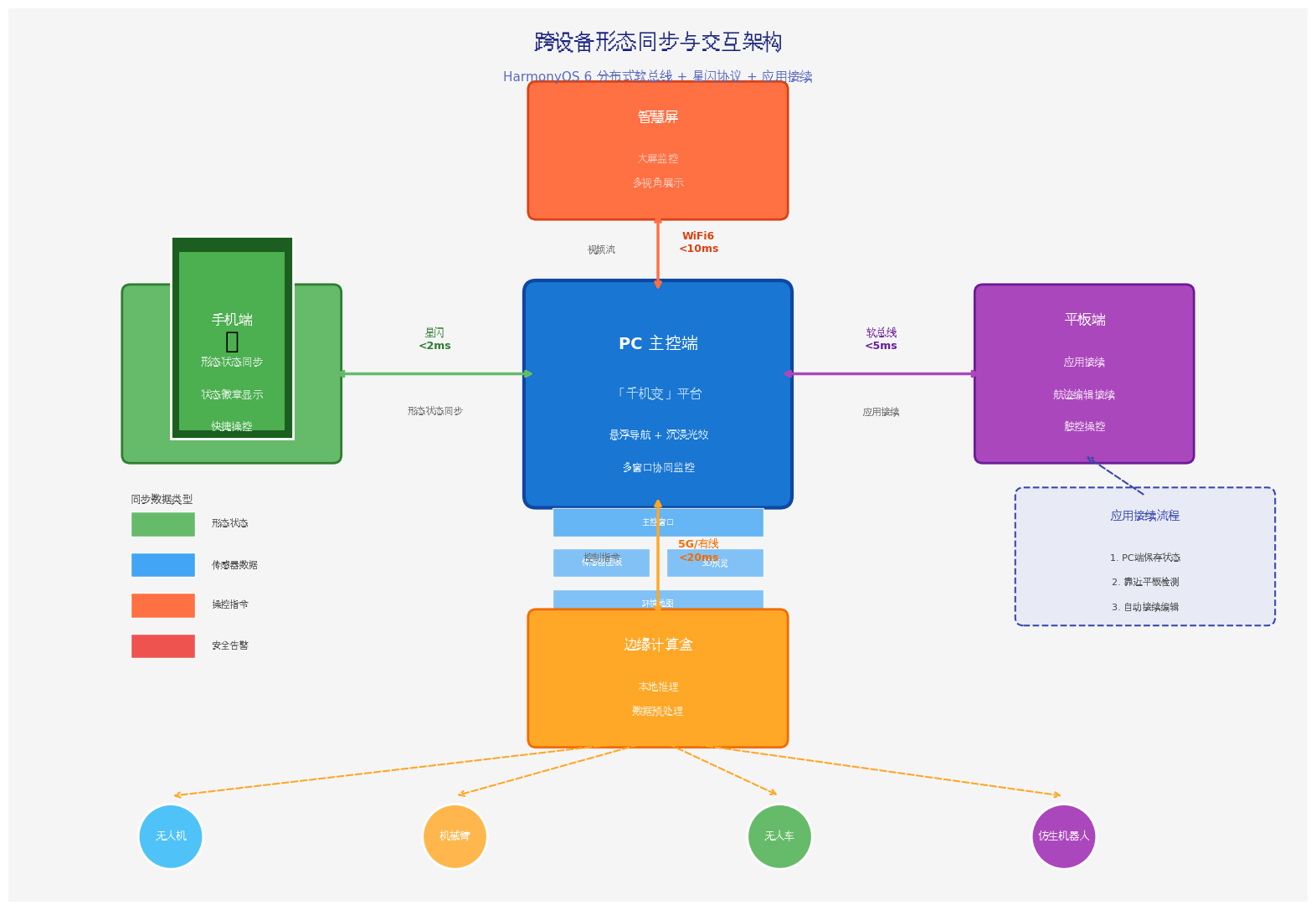
2.3 跨设备交互的鸿蒙方案
HarmonyOS 6通过分布式软总线实现了"毫秒级跨设备协作"。在「千机变」中,我们利用这一能力实现:
- 形态状态跨设备同步:PC端切换形态,手机端实时同步状态徽章
- 传感器数据分布式汇聚:无人机GPS、机械臂力矩、无人车激光雷达数据通过软总线汇聚至PC端统一显示
- 操控指令跨设备下发:PC端发出的控制指令通过软总线路由至对应终端执行器
- 应用接续:用户在PC端编辑的航迹规划,靠近平板时自动接续编辑
三、项目实战:「千机变」架构设计
3.1 应用场景与功能规划
面向HarmonyOS PC的具身智能体多形态操控场景:
| 功能模块 | 技术实现 | 沉浸光感/HMAF应用 |
|---|---|---|
| 主控制窗口 | Canvas + Gesture | 形态主题光效、操控区域氛围 |
| 形态悬浮导航 | HdsTabs + systemMaterialEffect | 形态色光效、状态徽章脉冲 |
| 形态适配引擎 | HMAF + 形态插件 | 形态切换意图理解 |
| 传感器面板 | 子窗口 + Chart | 数据流颜色编码 |
| 3D模型预览 | 子窗口 + WebGL | 形态切换形变动画 |
| 环境地图 | 子窗口 + Map | 路径光效追踪 |
| 分布式设备管理 | 软总线 + DeviceManager | 跨设备状态同步 |
| 跨设备接续 | ContinueAbility | 形态状态无缝流转 |
3.2 项目结构
entry/src/main/ets/
├── entryability/
│ └── EntryAbility.ets # 窗口沉浸配置 + 跨设备接续
├── components/
│ ├── MorphFloatNavigation.ets # 形态悬浮导航
│ ├── MorphLightEffect.ets # 形态光效系统
│ ├── SensorPanel.ets # 传感器面板
│ ├── ModelPreview.ets # 3D模型预览
│ ├── EnvironmentMap.ets # 环境地图
│ └── DeviceSyncPanel.ets # 跨设备同步面板
├── services/
│ ├── MorphEngine.ets # 形态适配引擎
│ ├── EmbodiedAgent.ets # 具身智能体核心
│ ├── ProtocolAdapter.ets # 协议适配层
│ └── DistributedSync.ets # 分布式同步服务
├── pages/
│ └── Index.ets # 主入口
└── resources/
└── rawfile/
└── models/ # 3D模型资源四、核心组件实战
4.1 窗口沉浸与跨设备接续配置(EntryAbility.ets)
代码亮点:不仅配置窗口全屏沉浸,还实现了跨设备接续能力------当用户从PC切换到平板时,形态状态、传感器数据、操控进度完整保留。
typescript
// entry/src/main/ets/entryability/EntryAbility.ets
import { AbilityConstant, UIAbility, Want } from '@kit.AbilityKit';
import { window } from '@kit.ArkUI';
import { BusinessError } from '@kit.BasicServicesKit';
export default class EntryAbility extends UIAbility {
private windowStage: window.WindowStage | null = null;
private currentMorph: string = 'flight';
private sensorSnapshot: Record<string, number> = {};
private editPosition: number = 0;
onCreate(want: Want, launchParam: AbilityConstant.LaunchParam): void {
// 检查是否为跨设备接续启动
if (want.parameters?.deviceId) {
console.info('从其他设备接续启动');
this.currentMorph = want.parameters.morph as string || 'flight';
this.sensorSnapshot = want.parameters.sensorSnapshot as Record<string, number> || {};
this.editPosition = want.parameters.editPosition as number || 0;
// 恢复形态状态
AppStorage.setOrCreate('current_morph', this.currentMorph);
AppStorage.setOrCreate('sensor_snapshot', this.sensorSnapshot);
}
}
onWindowStageCreate(windowStage: window.WindowStage): void {
this.windowStage = windowStage;
windowStage.loadContent('pages/Index', (err) => {
if (err.code) {
console.error('Failed to load content:', JSON.stringify(err));
return;
}
this.setupImmersiveWindow(windowStage);
});
}
private async setupImmersiveWindow(windowStage: window.WindowStage): Promise<void> {
try {
const mainWindow = windowStage.getMainWindowSync();
// 1. 设置窗口全屏布局
await mainWindow.setWindowLayoutFullScreen(true);
// 2. 设置窗口背景为透明
await mainWindow.setWindowBackgroundColor('#00000000');
// 3. 配置系统栏属性
await mainWindow.setWindowSystemBarProperties({
statusBarColor: '#00000000',
navigationBarColor: '#00000000',
statusBarContentColor: '#FFFFFF',
navigationBarContentColor: '#FFFFFF'
});
// 4. 启用安全区避让
await mainWindow.setWindowAvoidAreaOption({
type: window.AvoidAreaType.TYPE_SYSTEM,
enabled: true
});
// 5. PC端自由调整大小
await mainWindow.setWindowResizeEnabled(true);
console.info('Immersive window setup completed');
} catch (error) {
console.error('Failed to setup immersive window:', (error as BusinessError).message);
}
}
// 准备跨设备接续数据
async onContinue(wantParams: Record<string, unknown>): Promise<AbilityConstant.OnContinueResult> {
try {
// 保存当前形态状态
wantParams['morph'] = this.currentMorph;
wantParams['sensorSnapshot'] = this.sensorSnapshot;
wantParams['editPosition'] = this.editPosition;
wantParams['timestamp'] = Date.now();
console.info('Continue data prepared:', JSON.stringify(wantParams));
return AbilityConstant.OnContinueResult.AGREE;
} catch (error) {
console.error('Failed to prepare continue data:', error);
return AbilityConstant.OnContinueResult.REJECT;
}
}
onWindowStageDestroy(): void {
this.windowStage = null;
}
}
4.2 形态光效系统(MorphLightEffect.ets)
代码亮点:四种具身形态拥有专属光效人格(飞行天蓝、抓取琥珀、移动翠绿、仿生霓虹),形态切换时通过RGB插值实现平滑光效渐变,配合粒子系统营造"变身"仪式感。
typescript
// entry/src/main/ets/components/MorphLightEffect.ets
import { window } from '@kit.ArkUI';
export enum EmbodiedMorph {
FLIGHT = 'flight',
GRASP = 'grasp',
MOBILE = 'mobile',
BIOMIMETIC = 'biomimetic'
}
export interface MorphLightConfig {
primaryColor: string;
secondaryColor: string;
pulseColor: string;
ambientIntensity: number;
pulseSpeed: number;
particleCount: number;
blurRadius: number;
}
export const MorphLightConfigs: Record<EmbodiedMorph, MorphLightConfig> = {
[EmbodiedMorph.FLIGHT]: {
primaryColor: '#4FC3F7',
secondaryColor: '#81D4FA',
pulseColor: '#29B6F6',
ambientIntensity: 0.6,
pulseSpeed: 3000,
particleCount: 8,
blurRadius: 100
},
[EmbodiedMorph.GRASP]: {
primaryColor: '#FFB74D',
secondaryColor: '#FFCC80',
pulseColor: '#FFA726',
ambientIntensity: 0.7,
pulseSpeed: 4000,
particleCount: 5,
blurRadius: 80
},
[EmbodiedMorph.MOBILE]: {
primaryColor: '#66BB6A',
secondaryColor: '#81C784',
pulseColor: '#43A047',
ambientIntensity: 0.65,
pulseSpeed: 2500,
particleCount: 10,
blurRadius: 90
},
[EmbodiedMorph.BIOMIMETIC]: {
primaryColor: '#AB47BC',
secondaryColor: '#CE93D8',
pulseColor: '#8E24AA',
ambientIntensity: 0.75,
pulseSpeed: 2000,
particleCount: 12,
blurRadius: 120
}
};
@Component
export struct MorphLightEffect {
@State currentMorph: EmbodiedMorph = EmbodiedMorph.FLIGHT;
@State isTransitioning: boolean = false;
@State transitionProgress: number = 0;
private config: MorphLightConfig = MorphLightConfigs[this.currentMorph];
private transitionTimer: number = -1;
aboutToAppear(): void {
AppStorage.setOrCreate('morph_light_effect', this);
}
aboutToDisappear(): void {
clearInterval(this.transitionTimer);
}
public async transitionTo(morph: EmbodiedMorph): Promise<void> {
if (this.currentMorph === morph) return;
this.isTransitioning = true;
this.transitionProgress = 0;
const targetConfig = MorphLightConfigs[morph];
const startConfig = this.config;
this.transitionTimer = setInterval(() => {
this.transitionProgress += 0.05;
if (this.transitionProgress >= 1) {
this.transitionProgress = 1;
this.currentMorph = morph;
this.config = targetConfig;
this.isTransitioning = false;
clearInterval(this.transitionTimer);
}
}, 50);
}
private interpolateColor(color1: string, color2: string, progress: number): string {
const r1 = parseInt(color1.slice(1, 3), 16);
const g1 = parseInt(color1.slice(3, 5), 16);
const b1 = parseInt(color1.slice(5, 7), 16);
const r2 = parseInt(color2.slice(1, 3), 16);
const g2 = parseInt(color2.slice(3, 5), 16);
const b2 = parseInt(color2.slice(5, 7), 16);
const r = Math.round(r1 + (r2 - r1) * progress);
const g = Math.round(g1 + (g2 - g1) * progress);
const b = Math.round(b1 + (b2 - b1) * progress);
return `#${r.toString(16).padStart(2, '0')}${g.toString(16).padStart(2, '0')}${b.toString(16).padStart(2, '0')}`;
}
build() {
Stack() {
// 动态环境光晕
Column() {
ForEach([0, 1, 2], (index: number) => {
Column()
.width(300 + index * 100)
.height(300 + index * 100)
.backgroundColor(
this.isTransitioning
? this.interpolateColor(
MorphLightConfigs[this.currentMorph].primaryColor,
MorphLightConfigs[this.currentMorph === EmbodiedMorph.FLIGHT ? EmbodiedMorph.GRASP : EmbodiedMorph.FLIGHT].primaryColor,
this.transitionProgress
)
: this.config.primaryColor
)
.blur(this.config.blurRadius)
.opacity(this.config.ambientIntensity - index * 0.15)
.position({
x: `${30 + index * 15}%`,
y: 200 + index * 80
})
.animation({
duration: this.config.pulseSpeed,
curve: Curve.EaseInOut,
iterations: -1,
playMode: PlayMode.Alternate
})
})
}
.width('100%')
.height('100%')
.backgroundColor('#0a0a1a')
.expandSafeArea([SafeAreaType.SYSTEM], [SafeAreaEdge.TOP, SafeAreaEdge.BOTTOM])
// 粒子光效
ForEach(Array.from({ length: this.config.particleCount }), (_, index: number) => {
Column()
.width(4)
.height(4)
.backgroundColor(this.config.pulseColor)
.borderRadius(2)
.blur(4)
.opacity(0.8)
.position({
x: `${20 + (index * 60) % 60}%`,
y: `${10 + (index * 25) % 80}%`
})
.animation({
duration: this.config.pulseSpeed / 2 + index * 200,
curve: Curve.EaseInOut,
iterations: -1,
playMode: PlayMode.Alternate
})
.translate({
x: Math.sin(index) * 50,
y: Math.cos(index) * 30
})
})
// 形态切换过渡闪光
if (this.isTransitioning) {
Column()
.width('100%')
.height('100%')
.backgroundColor(
this.interpolateColor(
MorphLightConfigs[this.currentMorph].primaryColor,
MorphLightConfigs[this.currentMorph === EmbodiedMorph.FLIGHT ? EmbodiedMorph.GRASP : EmbodiedMorph.FLIGHT].primaryColor,
this.transitionProgress
)
)
.opacity(this.transitionProgress * 0.3)
.animation({
duration: 500,
curve: Curve.EaseOut
})
}
}
.width('100%')
.height('100%')
}
}
4.3 形态悬浮导航(MorphFloatNavigation.ets)
代码亮点:底部悬浮导航不仅承载形态切换,更实时显示跨设备同步状态------当无人机在手机端上线时,PC端导航栏的飞行图标自动显示"在线"绿点。
typescript
// entry/src/main/ets/components/MorphFloatNavigation.ets
import { EmbodiedMorph, MorphLightConfigs } from './MorphLightEffect';
interface MorphNavItem {
id: string;
morph: EmbodiedMorph;
icon: Resource;
label: string;
status: 'online' | 'offline' | 'running' | 'error';
deviceId: string; // 关联的分布式设备ID
}
@Component
export struct MorphFloatNavigation {
@State currentMorph: EmbodiedMorph = EmbodiedMorph.FLIGHT;
@State navTransparency: number = 0.70;
@State isExpanded: boolean = false;
@State bottomAvoidHeight: number = 0;
@State morphGroups: string[] = ['侦察组', '作业组', '运输组', '仿生组'];
@State currentGroup: number = 0;
private navItems: MorphNavItem[] = [
{ id: 'flight', morph: EmbodiedMorph.FLIGHT, icon: $r('app.media.ic_drone'), label: '飞行', status: 'online', deviceId: 'drone_001' },
{ id: 'grasp', morph: EmbodiedMorph.GRASP, icon: $r('app.media.ic_arm'), label: '抓取', status: 'offline', deviceId: 'arm_001' },
{ id: 'mobile', morph: EmbodiedMorph.MOBILE, icon: $r('app.media.ic_vehicle'), label: '移动', status: 'running', deviceId: 'vehicle_001' },
{ id: 'biomimetic', morph: EmbodiedMorph.BIOMIMETIC, icon: $r('app.media.ic_bionic'), label: '仿生', status: 'online', deviceId: 'bionic_001' }
];
aboutToAppear(): void {
this.getBottomAvoidArea();
this.startDeviceSync();
}
private async startDeviceSync(): Promise<void> {
// 监听分布式设备状态变化
AppStorage.setOrCreate('device_state_change', (deviceId: string, state: string) => {
const item = this.navItems.find(i => i.deviceId === deviceId);
if (item) {
item.status = state as 'online' | 'offline' | 'running' | 'error';
}
});
}
private getMorphColor(morph: EmbodiedMorph): string {
return MorphLightConfigs[morph].primaryColor;
}
private getStatusColor(status: string): string {
const colors: Record<string, string> = {
'online': '#66BB6A',
'offline': '#9E9E9E',
'running': '#FFB74D',
'error': '#EF5350'
};
return colors[status] || '#9E9E9E';
}
build() {
Stack({ alignContent: Alignment.Bottom }) {
Column() {
this.contentBuilder()
}
.padding({ bottom: this.bottomAvoidHeight + 80 })
Column() {
Stack() {
// 玻璃拟态背景
Column()
.width('100%')
.height('100%')
.backgroundBlurStyle(BlurStyle.REGULAR)
.opacity(this.navTransparency)
.backdropFilter($r('sys.blur.20'))
// 形态主题渐变光效层
Column()
.width('100%')
.height('100%')
.linearGradient({
direction: GradientDirection.Top,
colors: [
[this.getMorphColor(this.currentMorph) + '26', 0.0],
['rgba(255,255,255,0.05)', 1.0]
]
})
}
.width('100%')
.height('100%')
.borderRadius(24)
.shadow({
radius: 20,
color: this.getMorphColor(this.currentMorph) + '33',
offsetX: 0,
offsetY: -4
})
// 形态组切换标签
Row() {
ForEach(this.morphGroups, (group: string, index: number) => {
Text(group)
.fontSize(11)
.fontColor(this.currentGroup === index ? this.getMorphColor(this.currentMorph) : '#999999')
.backgroundColor(this.currentGroup === index ? this.getMorphColor(this.currentMorph) + '1A' : 'transparent')
.padding({ left: 8, right: 8, top: 2, bottom: 2 })
.borderRadius(10)
.onClick(() => {
this.currentGroup = index;
this.triggerHapticFeedback();
})
})
}
.width('100%')
.height(28)
.justifyContent(FlexAlign.Center)
.margin({ top: 4 })
// 形态导航项
Row() {
ForEach(this.navItems, (item: MorphNavItem) => {
Column() {
Stack() {
Image(item.icon)
.width(28)
.height(28)
.fillColor(this.currentMorph === item.morph ? this.getMorphColor(item.morph) : '#666666')
// 状态指示器(带分布式设备同步)
Column()
.width(8)
.height(8)
.backgroundColor(this.getStatusColor(item.status))
.borderRadius(4)
.border({ width: 1, color: '#FFFFFF' })
.position({ x: 20, y: -2 })
.shadow({
radius: 4,
color: this.getStatusColor(item.status),
offsetX: 0,
offsetY: 0
})
.animation({
duration: item.status === 'running' ? 1000 : 0,
curve: Curve.Linear,
iterations: -1
})
// 选中形态光晕
if (this.currentMorph === item.morph) {
Column()
.width(48)
.height(48)
.backgroundColor(this.getMorphColor(item.morph) + '33')
.borderRadius(24)
.blur(12)
.position({ x: -10, y: -10 })
.animation({
duration: 2000,
curve: Curve.EaseInOut,
iterations: -1,
playMode: PlayMode.Alternate
})
.scale({ x: 1.2, y: 1.2 })
}
}
.width(40)
.height(40)
Text(item.label)
.fontSize(11)
.fontColor(this.currentMorph === item.morph ? this.getMorphColor(item.morph) : '#999999')
.margin({ top: 4 })
}
.layoutWeight(1)
.onClick(() => {
this.switchMorph(item.morph);
})
.gesture(
LongPressGesture({ duration: 800 })
.onAction(() => {
this.showMorphDetail(item);
})
)
})
}
.width('100%')
.height(72)
.padding({ left: 16, right: 16 })
.justifyContent(FlexAlign.SpaceAround)
}
.width('92%')
.height(112)
.margin({ bottom: this.bottomAvoidHeight + 12, left: '4%', right: '4%' })
.animation({
duration: 300,
curve: Curve.Spring,
iterations: 1
})
}
.width('100%')
.height('100%')
}
@BuilderParam contentBuilder: () => void = this.defaultContentBuilder;
@Builder
defaultContentBuilder(): void {
Column() {
Text('内容区域')
.fontSize(16)
.fontColor('#999999')
}
.width('100%')
.height('100%')
.justifyContent(FlexAlign.Center)
}
private async switchMorph(morph: EmbodiedMorph): Promise<void> {
if (this.currentMorph === morph) return;
// 触发形态切换事件
AppStorage.setOrCreate('morph_transition', {
from: this.currentMorph,
to: morph,
timestamp: Date.now()
});
this.currentMorph = morph;
// 通知形态引擎进行切换
const engine = await import('../services/MorphEngine').then(m => m.MorphEngine.getInstance());
await engine.transitionTo(morph);
// 同步到其他设备
this.syncMorphToDevices(morph);
}
private async syncMorphToDevices(morph: EmbodiedMorph): Promise<void> {
try {
const distributedSync = await import('../services/DistributedSync').then(m => m.DistributedSync.getInstance());
await distributedSync.broadcastMorphChange(morph);
} catch (error) {
console.error('Failed to sync morph:', error);
}
}
private showMorphDetail(item: MorphNavItem): void {
console.info(`Morph detail: ${item.label}, device: ${item.deviceId}, status: ${item.status}`);
}
private triggerHapticFeedback(): void {
try {
import('@kit.SensorServiceKit').then(sensor => {
sensor.vibrator.startVibration({ type: 'time', duration: 50 }, { id: 0 });
});
} catch (error) {
console.error('Haptic feedback failed:', error);
}
}
}4.4 分布式同步服务(DistributedSync.ets)
代码亮点:基于HarmonyOS分布式软总线,实现形态状态、传感器数据、操控指令的跨设备实时同步。当PC端切换形态时,手机端和平板端自动同步状态徽章。
typescript
// entry/src/main/ets/services/DistributedSync.ets
import distributedDevice from '@ohos.distributedDevice';
import { BusinessError } from '@kit.BasicServicesKit';
export class DistributedSync {
private static instance: DistributedSync;
private deviceManager: distributedDevice.DeviceManager | null = null;
private connectedDevices: string[] = [];
private dataSyncChannel: distributedDevice.DataSync | null = null;
private constructor() {
this.initializeDeviceManager();
}
static getInstance(): DistributedSync {
if (!DistributedSync.instance) {
DistributedSync.instance = new DistributedSync();
}
return DistributedSync.instance;
}
private async initializeDeviceManager(): Promise<void> {
try {
this.deviceManager = distributedDevice.createDeviceManager('com.harmonyos.qianjibian');
if (this.deviceManager) {
// 监听设备状态变化
this.deviceManager.on('deviceStateChange', (data: distributedDevice.DeviceStateChangeInfo) => {
console.info(`设备状态变更: ${data.deviceName} -> ${data.state}`);
if (data.state === distributedDevice.DeviceState.ONLINE) {
this.connectedDevices.push(data.deviceId);
this.establishSyncChannel(data.deviceId);
} else if (data.state === distributedDevice.DeviceState.OFFLINE) {
this.connectedDevices = this.connectedDevices.filter(id => id !== data.deviceId);
}
// 通知UI更新设备状态
AppStorage.setOrCreate('device_state_change', {
deviceId: data.deviceId,
state: data.state === distributedDevice.DeviceState.ONLINE ? 'online' : 'offline'
});
});
}
} catch (error) {
console.error('Failed to initialize device manager:', error);
}
}
private async establishSyncChannel(deviceId: string): Promise<void> {
try {
if (!this.deviceManager) return;
// 优先使用星闪协议连接
const connectParam: distributedDevice.ConnectParam = {
protocol: 'NearLink',
authType: distributedDevice.AuthType.NONE
};
await this.deviceManager.connectDevice(deviceId, connectParam);
console.info(`设备${deviceId}连接成功,使用星闪协议`);
// 初始化分布式数据同步通道
this.initDataSync(deviceId);
} catch (error) {
console.error('星闪连接失败,降级为软总线:', error);
// 降级为分布式软总线
if (this.deviceManager) {
await this.deviceManager.connectDevice(deviceId, { protocol: 'SoftBus' });
this.initDataSync(deviceId);
}
}
}
private initDataSync(deviceId: string): void {
// 初始化分布式KV存储用于形态状态同步
console.info(`初始化数据同步通道: ${deviceId}`);
}
// 广播形态变更到所有连接设备
public async broadcastMorphChange(morph: string): Promise<void> {
for (const deviceId of this.connectedDevices) {
try {
await this.sendToDevice(deviceId, {
type: 'morph_change',
payload: { morph, timestamp: Date.now() }
});
} catch (error) {
console.error(`Failed to sync morph to ${deviceId}:`, error);
}
}
}
// 广播传感器数据到所有连接设备
public async broadcastSensorData(data: Record<string, number>): Promise<void> {
for (const deviceId of this.connectedDevices) {
try {
await this.sendToDevice(deviceId, {
type: 'sensor_data',
payload: data
});
} catch (error) {
console.error(`Failed to sync sensor data to ${deviceId}:`, error);
}
}
}
// 发送数据到指定设备
private async sendToDevice(deviceId: string, message: object): Promise<void> {
// 实际实现通过分布式软总线发送
console.info(`Sending to ${deviceId}:`, JSON.stringify(message));
}
// 获取所有在线设备
public getOnlineDevices(): string[] {
return this.connectedDevices;
}
}4.5 具身智能体核心(EmbodiedAgent.ets)
代码亮点:基于HMAF鸿蒙智能体框架,支持自然语言操控形态切换。用户可以说"切换到飞行模式"或"让机械臂去抓取那个物体",智能体通过Intents Kit解析意图并执行。
typescript
// entry/src/main/ets/services/EmbodiedAgent.ets
import { agentFramework } from '@kit.AgentFrameworkKit';
import { intents } from '@kit.IntentsKit';
export interface MorphCapability {
morph: string;
sensors: string[];
actuators: string[];
controlProtocol: string;
safetyConstraints: SafetyConstraint[];
}
export interface SafetyConstraint {
type: string;
threshold: number;
action: string;
}
export class EmbodiedAgent {
private static instance: EmbodiedAgent;
private currentMorph: string = 'flight';
private morphCapabilities: Map<string, MorphCapability> = new Map();
private agentSession: agentFramework.AgentSession | null = null;
private constructor() {
this.initializeMorphCapabilities();
}
static getInstance(): EmbodiedAgent {
if (!EmbodiedAgent.instance) {
EmbodiedAgent.instance = new EmbodiedAgent();
}
return EmbodiedAgent.instance;
}
private initializeMorphCapabilities(): void {
this.morphCapabilities.set('flight', {
morph: 'flight',
sensors: ['gps', 'imu', 'camera', 'lidar', 'barometer'],
actuators: ['rotor', 'gimbal', 'landing_gear'],
controlProtocol: 'MAVLink',
safetyConstraints: [
{ type: 'altitude', threshold: 120, action: 'return_home' },
{ type: 'battery', threshold: 20, action: 'emergency_land' },
{ type: 'geofence', threshold: 0, action: 'hover' }
]
});
this.morphCapabilities.set('grasp', {
morph: 'grasp',
sensors: ['force_torque', 'camera', 'joint_encoder', 'tactile'],
actuators: ['joint_6dof', 'gripper', 'wrist'],
controlProtocol: 'ROS2',
safetyConstraints: [
{ type: 'force', threshold: 50, action: 'release' },
{ type: 'workspace', threshold: 0, action: 'stop' },
{ type: 'collision', threshold: 0, action: 'retract' }
]
});
this.morphCapabilities.set('mobile', {
morph: 'mobile',
sensors: ['lidar', 'camera', 'wheel_encoder', 'ultrasonic'],
actuators: ['wheel_4wd', 'steering', 'suspension'],
controlProtocol: 'CAN',
safetyConstraints: [
{ type: 'speed', threshold: 30, action: 'decelerate' },
{ type: 'obstacle', threshold: 1.0, action: 'brake' },
{ type: 'slope', threshold: 30, action: 'stop' }
]
});
this.morphCapabilities.set('biomimetic', {
morph: 'biomimetic',
sensors: ['flex_sensor', 'pressure', 'gyro', 'bio_camera'],
actuators: ['muscle_actuator', 'tentacle', 'fin', 'wing'],
controlProtocol: 'BioBus',
safetyConstraints: [
{ type: 'temperature', threshold: 60, action: 'shutdown' },
{ type: 'deformation', threshold: 0.5, action: 'reset' },
{ type: 'energy', threshold: 15, action: 'hibernate' }
]
});
}
public async initialize(): Promise<void> {
try {
this.agentSession = await agentFramework.createAgentSession({
agentId: 'embodied_agent_001',
capabilities: ['perception', 'planning', 'control', 'safety'],
modelConfig: {
modelType: agentFramework.ModelType.LLM,
modelId: 'huawei-pangu-embodied-v2'
}
});
console.info('Embodied agent session initialized');
} catch (error) {
console.error('Failed to initialize agent session:', error);
throw error;
}
}
// 基于自然语言的形态切换
public async switchMorphByIntent(userInput: string): Promise<boolean> {
try {
// 通过Intents Kit解析用户意图
const intent = await intents.parseIntent({
action: 'switch_morph',
utterance: userInput
});
const targetMorph = intent.parameters?.target as string;
if (targetMorph && this.morphCapabilities.has(targetMorph)) {
return await this.switchMorph(targetMorph);
}
console.error('Unknown morph in intent:', targetMorph);
return false;
} catch (error) {
console.error('Intent parsing failed:', error);
return false;
}
}
// 直接形态切换
public async switchMorph(targetMorph: string): Promise<boolean> {
const capability = this.morphCapabilities.get(targetMorph);
if (!capability) {
console.error(`Unknown morph: ${targetMorph}`);
return false;
}
try {
await this.performSafetyCheck(this.currentMorph, targetMorph);
const intent = await intents.parseIntent({
action: 'switch_morph',
parameters: { from: this.currentMorph, to: targetMorph }
});
await this.agentSession?.executeTask({
taskType: 'morph_transition',
context: {
currentMorph: this.currentMorph,
targetMorph: targetMorph,
capabilities: capability,
intent: intent
}
});
this.currentMorph = targetMorph;
this.emitMorphChanged(targetMorph);
console.info(`Morph switched to: ${targetMorph}`);
return true;
} catch (error) {
console.error('Morph switch failed:', error);
return false;
}
}
private async performSafetyCheck(from: string, to: string): Promise<void> {
const fromCapability = this.morphCapabilities.get(from);
const toCapability = this.morphCapabilities.get(to);
if (from === 'flight' && to === 'grasp') {
console.info('Safety check: confirming landing status');
}
for (const constraint of toCapability?.safetyConstraints || []) {
console.info(`Safety constraint: ${constraint.type} threshold ${constraint.threshold}`);
}
}
public getCurrentCapability(): MorphCapability | undefined {
return this.morphCapabilities.get(this.currentMorph);
}
public getAllCapabilities(): MorphCapability[] {
return Array.from(this.morphCapabilities.values());
}
private emitMorphChanged(morph: string): void {
AppStorage.setOrCreate('current_morph', morph);
}
public async executeAction(action: string, parameters: Record<string, unknown>): Promise<void> {
const capability = this.getCurrentCapability();
if (!capability) {
throw new Error('No morph capability available');
}
if (!capability.actuators.some(a => action.includes(a))) {
throw new Error(`Action ${action} not supported by current morph ${this.currentMorph}`);
}
await this.agentSession?.executeTask({
taskType: 'embodied_action',
context: { action, parameters, morph: this.currentMorph }
});
}
}
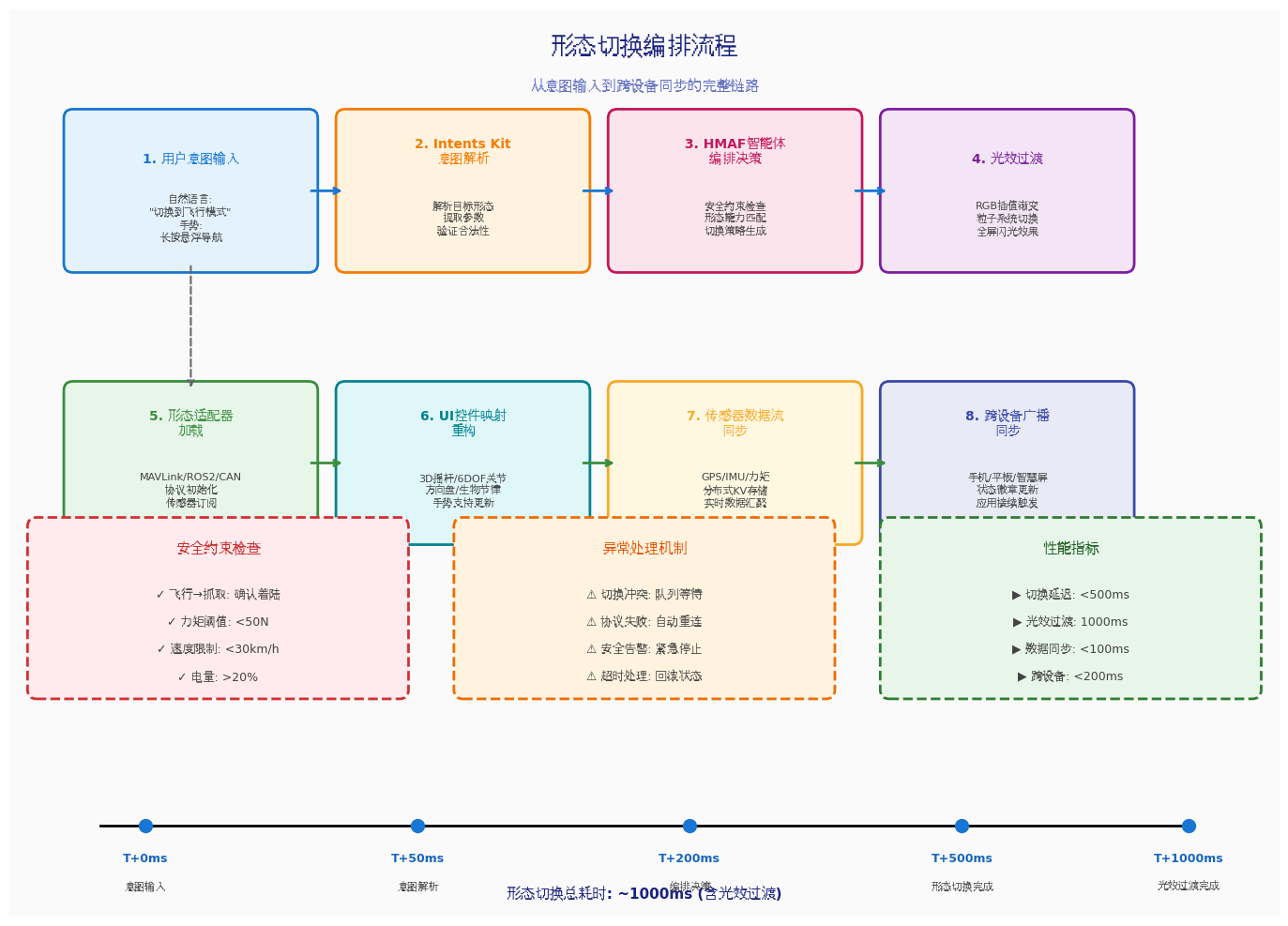
4.6 形态适配引擎(MorphEngine.ets)
代码亮点:形态切换时依次执行光效过渡→智能体切换→适配器加载→UI映射更新→传感器同步→跨设备广播,形成完整的切换编排链路。
typescript
// entry/src/main/ets/services/MorphEngine.ets
import { EmbodiedAgent, MorphCapability } from './EmbodiedAgent';
import { EmbodiedMorph } from '../components/MorphLightEffect';
export class MorphEngine {
private static instance: MorphEngine;
private embodiedAgent: EmbodiedAgent;
private morphAdapters: Map<string, MorphAdapter> = new Map();
private isTransitioning: boolean = false;
private constructor() {
this.embodiedAgent = EmbodiedAgent.getInstance();
this.initializeAdapters();
}
static getInstance(): MorphEngine {
if (!MorphEngine.instance) {
MorphEngine.instance = new MorphEngine();
}
return MorphEngine.instance;
}
private initializeAdapters(): void {
this.morphAdapters.set('flight', new FlightAdapter());
this.morphAdapters.set('grasp', new GraspAdapter());
this.morphAdapters.set('mobile', new MobileAdapter());
this.morphAdapters.set('biomimetic', new BiomimeticAdapter());
}
public async transitionTo(targetMorph: EmbodiedMorph): Promise<void> {
if (this.isTransitioning) {
throw new Error('Morph transition already in progress');
}
this.isTransitioning = true;
const morphKey = targetMorph.toString();
try {
// 1. 触发UI光效过渡
await this.triggerLightTransition(targetMorph);
// 2. 调用具身智能体进行形态切换
const success = await this.embodiedAgent.switchMorph(morphKey);
if (!success) {
throw new Error('Agent morph switch failed');
}
// 3. 加载形态适配器
const adapter = this.morphAdapters.get(morphKey);
if (adapter) {
await adapter.initialize();
}
// 4. 更新UI控件映射
await this.updateUIControlMapping(targetMorph);
// 5. 同步传感器数据流
await this.syncSensorStream(targetMorph);
// 6. 广播到其他设备
await this.broadcastToDevices(targetMorph);
console.info(`Morph transition to ${targetMorph} completed`);
} catch (error) {
console.error('Morph transition failed:', error);
throw error;
} finally {
this.isTransitioning = false;
}
}
private async triggerLightTransition(morph: EmbodiedMorph): Promise<void> {
return new Promise((resolve) => {
AppStorage.setOrCreate('light_transition_target', morph);
setTimeout(resolve, 1000);
});
}
private async updateUIControlMapping(morph: EmbodiedMorph): Promise<void> {
const controlMappings: Record<EmbodiedMorph, ControlMapping> = {
[EmbodiedMorph.FLIGHT]: {
primaryControl: 'joystick_3d',
secondaryControls: ['altitude_slider', 'gimbal_control', 'flight_mode'],
gestureSupport: ['pinch_zoom', 'swipe_rotate', 'tap_land']
},
[EmbodiedMorph.GRASP]: {
primaryControl: 'joint_control_6dof',
secondaryControls: ['gripper_slider', 'force_feedback', 'workspace_view'],
gestureSupport: ['drag_pose', 'pinch_grasp', 'double_tap_release']
},
[EmbodiedMorph.MOBILE]: {
primaryControl: 'steering_wheel',
secondaryControls: ['speed_pedal', 'path_editor', 'obstacle_map'],
gestureSupport: ['swipe_steer', 'press_accelerate', 'long_press_brake']
},
[EmbodiedMorph.BIOMIMETIC]: {
primaryControl: 'bio_rhythm',
secondaryControls: ['morphology_slider', 'energy_flow', 'behavior_tree'],
gestureSupport: ['swim_gesture', 'flap_rhythm', 'curl_tentacle']
}
};
AppStorage.setOrCreate('control_mapping', controlMappings[morph]);
}
private async syncSensorStream(morph: EmbodiedMorph): Promise<void> {
const capability = this.embodiedAgent.getCurrentCapability();
if (!capability) return;
const sensorTopics = capability.sensors.map(s => `/sensor/${s}`);
console.info(`Subscribing to sensors: ${sensorTopics.join(', ')}`);
AppStorage.setOrCreate('active_sensors', sensorTopics);
}
private async broadcastToDevices(morph: EmbodiedMorph): Promise<void> {
try {
const distributedSync = await import('./DistributedSync').then(m => m.DistributedSync.getInstance());
await distributedSync.broadcastMorphChange(morph.toString());
} catch (error) {
console.error('Broadcast failed:', error);
}
}
}
abstract class MorphAdapter {
abstract initialize(): Promise<void>;
abstract executeCommand(command: string, params: unknown): Promise<void>;
abstract getStatus(): Record<string, unknown>;
}
class FlightAdapter extends MorphAdapter {
async initialize(): Promise<void> {
console.info('Flight adapter initialized');
}
async executeCommand(command: string, params: unknown): Promise<void> {
console.info(`Flight command: ${command}`, params);
}
getStatus(): Record<string, unknown> {
return { altitude: 50, speed: 15, battery: 85, gps_satellites: 12 };
}
}
class GraspAdapter extends MorphAdapter {
async initialize(): Promise<void> {
console.info('Grasp adapter initialized');
}
async executeCommand(command: string, params: unknown): Promise<void> {
console.info(`Grasp command: ${command}`, params);
}
getStatus(): Record<string, unknown> {
return { joint_angles: [0, 0, 0, 0, 0, 0], gripper_force: 0, payload: 0 };
}
}
class MobileAdapter extends MorphAdapter {
async initialize(): Promise<void> {
console.info('Mobile adapter initialized');
}
async executeCommand(command: string, params: unknown): Promise<void> {
console.info(`Mobile command: ${command}`, params);
}
getStatus(): Record<string, unknown> {
return { speed: 0, heading: 0, odometer: 0, fuel: 100 };
}
}
class BiomimeticAdapter extends MorphAdapter {
async initialize(): Promise<void> {
console.info('Biomimetic adapter initialized');
}
async executeCommand(command: string, params: unknown): Promise<void> {
console.info(`Biomimetic command: ${command}`, params);
}
getStatus(): Record<string, unknown> {
return { muscle_tension: 0.5, bio_rhythm: 'calm', energy_level: 80 };
}
}
interface ControlMapping {
primaryControl: string;
secondaryControls: string[];
gestureSupport: string[];
}五、多窗口形态监控与跨设备协同
HarmonyOS PC的自由窗口能力为具身智能体操控提供了多视角监控:
typescript
// 创建浮动传感器面板窗口
async function createSensorPanelWindow(windowStage: window.WindowStage): Promise<void> {
const sensorWindow = await windowStage.createSubWindow('sensor_panel');
await sensorWindow.moveWindowTo(1200, 100);
await sensorWindow.resize(320, 480);
await sensorWindow.setWindowBackgroundColor('#00000000');
await sensorWindow.loadContent('pages/SensorPanel');
await sensorWindow.showWindow();
}
// 创建浮动3D模型预览窗口
async function createModelPreviewWindow(windowStage: window.WindowStage): Promise<void> {
const modelWindow = await windowStage.createSubWindow('model_preview');
await modelWindow.moveWindowTo(100, 600);
await modelWindow.resize(400, 300);
await modelWindow.setWindowBackgroundColor('#00000000');
await modelWindow.loadContent('pages/ModelPreview');
await modelWindow.showWindow();
}
// 创建浮动环境地图窗口
async function createMapWindow(windowStage: window.WindowStage): Promise<void> {
const mapWindow = await windowStage.createSubWindow('environment_map');
await mapWindow.moveWindowTo(1200, 600);
await mapWindow.resize(400, 400);
await mapWindow.setWindowBackgroundColor('#00000000');
await mapWindow.loadContent('pages/EnvironmentMap');
await mapWindow.showWindow();
}六、关键技术总结
6.1 悬浮导航适配清单
| 适配项 | API/方法 | 说明 |
|---|---|---|
| 获取安全区高度 | window.getWindowAvoidArea() |
获取底部导航指示器高度 |
| 背景模糊效果 | backgroundBlurStyle() |
系统级毛玻璃效果 |
| 背景滤镜 | backdropFilter() |
更精细的模糊控制 |
| 扩展安全区 | expandSafeArea() |
内容延伸至非安全区 |
| 窗口自由调整 | setWindowResizeEnabled() |
PC端自由调整大小 |
6.2 跨设备交互最佳实践
- 星闪优先:优先使用NearLink协议连接,失败时自动降级为分布式软总线
- 状态同步:形态状态、传感器数据、操控进度通过分布式KV存储实时同步
- 应用接续 :利用
onContinue和onCreate实现跨设备状态无缝流转 - 设备发现:自动发现周边鸿蒙设备,同一账号下无需额外认证
6.3 具身智能体设计原则
- 形态能力隔离:通过适配器模式隔离不同形态的硬件差异
- 安全优先:每种形态内置安全约束,切换前自动检查
- 意图自然化:通过Intents Kit支持自然语言操控
- 分布式感知:利用鸿蒙分布式软总线汇聚多设备传感器
七、调试与测试建议
- 真机调试:玻璃拟态效果在模拟器上可能显示异常,建议在支持HarmonyOS 6的PC真机上测试
- 多设备协同:测试分布式软总线下的传感器数据汇聚,确保多设备数据同步
- 形态切换压力测试:快速连续切换形态,验证适配器初始化和资源释放的稳定性
- 跨设备接续测试:在PC端切换形态后,靠近平板验证状态是否自动同步
八、总结与展望
本文基于HarmonyOS 6(API 23)的悬浮导航 、沉浸光感 与HMAF智能体框架,完整实战了PC端「千机变」自适应智能体形态引擎与跨设备交互平台。核心创新点总结:
-
自适应形态引擎:不是简单的主题切换,而是基于形态能力的UI重构------每种形态拥有独立的控件映射、手势支持、安全约束和传感器面板
-
形态感知沉浸光效:四种具身形态拥有专属光效人格(飞行天蓝、抓取琥珀、移动翠绿、仿生霓虹),通过颜色心理学强化操作直觉
-
HMAF意图驱动编排:基于鸿蒙智能体框架,支持自然语言操控形态切换(如"切换到飞行模式"),通过Intents Kit解析用户意图
-
跨设备形态同步:通过分布式软总线实现PC端形态切换→手机端状态同步→平板端操控接续的完整链路
-
多窗口协同监控:主控制窗口 + 浮动传感器面板 + 浮动3D模型预览 + 浮动环境地图窗口的四层架构
未来扩展方向:
- 接入分布式软总线4.0,实现PC主控 + 边缘计算盒 + 终端执行器的三级协同
- 数字孪生集成:构建物理实体的数字孪生,在虚拟环境中预演形态切换
- VR/AR融合操控:支持VR头显接入,实现完全沉浸式的具身智能体操控
- 群体智能编排:从单体形态切换扩展至多智能体集群形态协同
- 自进化形态:基于强化学习,让智能体自主发现最优形态组合策略
水无常形,兵无常势。真正的强大,不是固守一种姿态,而是能在万物变化中找到最适合自己的形态。千机百变,唯智不变。
转载自:https://blog.csdn.net/u014727709/article/details/162421039
欢迎 👍点赞✍评论⭐收藏,欢迎指正