第 3 篇结束后,当前激光点云已经完成 Local SLAM:去畸变、位姿预测、扫描匹配、MotionFilter 判断,以及 Active Submap 插入。接下来 Global SLAM 要做的不是重新把每帧点云建一遍图,而是把前端认可的局部观测整理成 Node,把局部地图整理成 Submap,再不断建立它们之间的约束,最后统一优化。
这一篇最容易混淆的点有四个:Trajectory 和 Node 是什么关系;Node 里具体存什么;Node 与 Submap 到底怎样建立关系;以及 Cartographer 后端除了局部约束和回环约束外,还有哪些约束参与最终优化。把这些问题弄清楚后,PoseGraph2D 的代码结构就顺了。
整条主线可以先固定为:
Trajectory(一条独立 SLAM 运行实例)
↓
Local SLAM 持续输出 MatchingResult
↓
当前扫描真正插入 Submap
↓
生成 InsertionResult
↓
GlobalTrajectoryBuilder 调用 PoseGraph2D::AddNode(...)
↓
产生 TrajectoryNode
↓
Node ↔ 当前插入 Submap:INTRA_SUBMAP
↓
Node ↔ 历史完成 Submap:尝试 INTER_SUBMAP
↓
Fast Correlative 粗搜索 + Ceres 精修
↓
PoseGraph / OptimizationProblem2D 全局优化需要先纠正一个常见说法:Cartographer 的显式 Constraint 对象 确实主要是 Node-Submap 关系,标签只有 INTRA_SUBMAP 和 INTER_SUBMAP 两类;但真正进入 Ceres 全局优化时,还会额外加入相邻 Node 之间的 Local SLAM 相对位姿残差、Odom 残差、可选的固定坐标系残差和 Landmark 残差。所以可以说 Cartographer 的主图是 Node-Submap 图,但它的最终优化问题并不只有 Node-Submap 两类残差。
一、Trajectory、Node、Submap 的层级关系
Trajectory(轨迹) 不是 RViz 里那条折线,而是一条完整 SLAM 任务的运行容器。一次建图、一次定位、一次重新启动后的独立 SLAM 流,通常都会对应一个 Trajectory。它内部持续维护当前传感器流、Local SLAM 状态、Node、Submap、PoseGraph 状态以及相关后端数据。
因此可以把一条 Trajectory 看成一条"时间主线",Node 和 Submap 都是在这条主线上不断生成的对象:
Trajectory 0
├── Node 0
├── Node 1
├── Node 2
├── Node 3
├── ...
│
├── Submap 0
├── Submap 1
├── Submap 2
└── ...Node 的编号不是单一整数,而是:
NodeId = [trajectory_id, node_index]
SubmapId = [trajectory_id, submap_index]例如 NodeId{0, 35} 表示第 0 条 Trajectory 中的第 35 个 Node;SubmapId{0, 8} 表示该 Trajectory 的第 8 张局部子图。这样多机器人、多次建图或多 Trajectory 场景中,即使不同轨迹都有 "Node 35",系统也不会混淆。PoseGraph2D 在追加 Node 时,会将其加入对应 Trajectory,并在发现一个此前未登记的新 Submap 时为其创建对应 SubmapId。
Trajectory 是"整条 SLAM 生命周期";Node 是这条轨迹上的关键局部观测;Submap 是一段时间内由多个 Node 相关点云共同累积出的局部地图块。它们不是同一层级:Trajectory 包含 Node 和 Submap,Node 与 Submap 则通过约束连接。
二、Node 怎么产生:它不是每一帧 LiDAR
在 Cartographer 2D 中,一帧 LiDAR(激光雷达)点云进入系统后,并不会立刻变成 Node(轨迹节点,后端长期保存并参与全局优化的一次关键观测)。它必须先经过 Local SLAM(局部 SLAM 前端)的位姿预测、点云去畸变、实时扫描匹配和运动筛选;只有这一帧真正被允许写入 ActiveSubmaps2D(当前正在构建的二维子地图)后,才会形成 InsertionResult(插图结果),并进一步交给 PoseGraph(位姿图后端)创建 Node。
整个过程可以概括为:
原始 LiDAR 点云
↓
LocalTrajectoryBuilder2D::AddRangeData(...)
↓
多雷达数据整理 + 位姿预测 + 去畸变 + 扫描匹配
↓
MatchingResult(当前帧局部匹配结果)
↓
MotionFilter(运动过滤器)判断是否需要插图
↓
通过
↓
插入 ActiveSubmaps2D(活动子地图)
↓
InsertionResult(插图结果)
↓
PoseGraph::AddNode(...)
↓
TrajectoryNode(后端轨迹节点)这里最重要的一点是:MatchingResult(扫描匹配结果)只表示"当前帧的局部位姿已经计算出来了";而 InsertionResult(插图结果)才表示"当前帧真的参与了建图,并且会进入后端成为 Node"。
1.当前帧首先进入 LocalTrajectoryBuilder2D
当前 LiDAR 点云通常会进入:
LocalTrajectoryBuilder2D::AddRangeData(...)LocalTrajectoryBuilder2D(二维局部轨迹构建器)是 Cartographer 2D 前端的核心类,主要负责处理当前帧点云,并估计机器人此刻在局部地图中的位姿。
AddRangeData(...)(添加距离观测数据)并不是简单把一帧点云塞进去,而是把当前雷达观测交给 Local SLAM 进行完整处理。处理后的数据通常会以 RangeData(距离观测数据)的形式存在,其中包含激光原点、命中点、未命中射线以及时间相关信息。
如果机器人装有多个 LiDAR,例如前雷达、后雷达或左右雷达,那么 Cartographer 还会先经过 RangeDataCollator(多雷达数据整理器)。它会缓存不同雷达的数据,并按照时间戳进行整理,使多路雷达数据能够以较合理的时间顺序进入 Local SLAM。
需要注意,RangeDataCollator 做的是软件层面的时间整理,并不代表多个雷达一定在硬件层面同时发射或同时采样。
2.PoseExtrapolator 先预测当前机器人在哪里
在扫描匹配之前,系统必须先给当前帧一个初始位姿。这个初始位姿由 PoseExtrapolator(位姿外推器、位姿预测器)提供。
所谓机器人位姿 pose(位置和朝向),在二维 SLAM 中通常可以写成:
pose = (x, y, yaw)其中,x 和 y 表示机器人在平面地图中的位置;yaw(航向角)表示机器人绕竖直方向旋转的角度,也就是机器人朝向。
PoseExtrapolator 会利用历史 Local SLAM 位姿、IMU(惯性测量单元)、Odometry(轮速里程计或外部里程计)等数据,预测当前时刻机器人的大概位置和朝向。这个预测结果通常可以理解为:
pose_prediction(t)其中,pose_prediction(预测位姿)只是扫描匹配的初始猜测,不是最终结果。
例如,上一帧机器人位于 (10.00 m, 5.00 m, 0°),轮速里程计显示机器人向前移动了约 0.10 m,那么系统可能先预测当前位姿为:
x = 10.10 m
y = 5.00 m
yaw = 0°随后扫描匹配会以这个预测结果为起点,结合当前 LiDAR 点云和局部地图进一步修正。
3.逐点去畸变:同一帧点云并不是同一时刻采到的
LiDAR 的一帧扫描不是瞬间完成的。假设雷达频率为 10 Hz,那么一帧扫描大约持续 0.1 s。机器人在这一段时间内可能正在前进、转弯或轻微晃动,因此同一帧中不同激光点的真实采样时刻不同。
某个点的采样时刻可以抽象写成:
t_point = t_scan + Δt其中,t_scan(当前帧扫描基准时间)表示这帧点云的参考时刻;Δt(相对时间偏移)表示当前点相对于基准时刻的时间差;t_point(该点真实采样时间)则表示这个激光点真正被测量到的时间。
如果机器人扫描过程中正在运动,而系统不做处理,就会出现墙面弯曲、障碍物边缘拉伸、走廊轮廓错位等问题,这就是点云运动畸变。
因此 Cartographer 会利用 PoseExtrapolator 在各个 t_point 时刻预测机器人位姿,再把不同时间采到的点转换到统一参考时刻或统一局部坐标系中。这个过程通常称为逐点去畸变。
去畸变后的点云,才适合参与后续的局部地图匹配。
4.实时扫描匹配后得到 MatchingResult
完成位姿预测和去畸变后,Cartographer 会进行实时扫描匹配。扫描匹配的目标是:寻找一个更准确的机器人位姿,使当前帧点云投影到局部地图后,能够尽可能和已有墙体、障碍物边缘、走廊结构和空闲区域重合。
其核心思想可以抽象为:
T* = argmin Σ residual(当前帧点云, 局部子地图)其中,T*(最优坐标变换)表示扫描匹配最终求出的机器人位姿;residual(残差、匹配误差)表示当前帧点云与局部地图之间的不一致程度;argmin 表示寻找总误差最小的那组位姿参数。
扫描匹配完成后,Local SLAM 会输出 MatchingResult(扫描匹配结果)。它通常包含当前时间戳、局部位姿、已经转换到局部坐标系的点云,以及是否存在插图结果。
可以概念性理解为:
MatchingResult {
time; // 当前观测时间戳
local_pose; // 当前帧在局部坐标系中的估计位姿
range_data_in_local; // 转到局部坐标系后的点云
insertion_result; // 插图结果,可能为空
}其中,local_pose(局部位姿)表示当前帧经过扫描匹配后得到的位置和朝向;range_data_in_local(局部坐标系下的距离数据)表示已经完成坐标变换和去畸变的当前帧点云。
这一步只说明:当前机器人此刻大概在哪里,已经被 Local SLAM 算出来了。
但它还不能说明:这一帧一定会成为 Node。
5.MotionFilter 决定这一帧是否值得插图
即使扫描匹配成功,机器人也可能几乎没有运动。例如机器人静止时,LiDAR 仍然会持续发布点云,系统仍然会持续计算当前位姿,但连续多帧点云几乎完全相同。
例如:
上一次有效插图:
x = 12.350 m
y = 8.720 m
yaw = 91.0°
当前扫描匹配结果:
x = 12.354 m
y = 8.721 m
yaw = 91.1°从定位角度看,当前帧仍然有效,因为系统知道机器人还在原来的位置附近;但从建图角度看,这一帧几乎没有新增环境信息。如果每帧都写入地图,就会不断重复更新同一批栅格,也会不断生成重复 Node,导致后端计算量快速增加。
因此 Cartographer 会通过 MotionFilter(运动过滤器)判断当前帧是否值得插图。
它通常会检查当前帧相对于上一次有效插图之间的三个变化量:
Δt = t_current - t_last_insertion
Δd = √((x_current - x_last)² + (y_current - y_last)²)
Δθ = |yaw_current - yaw_last|其中,Δt(时间差)表示当前帧距离上一次有效插图过去了多久;Δd(平移距离差)表示机器人相对上一次插图移动了多远;Δθ(角度差)表示机器人相对上一次插图旋转了多大角度。
x_current、y_current 和 yaw_current 来自当前扫描匹配得到的 local_pose;x_last、y_last 和 yaw_last 则来自上一次真正插入 Submap 时记录的位姿。
MotionFilter 常见的配置参数包括:
max_time_seconds
max_distance_meters
max_angle_radiansmax_time_seconds(最大时间阈值)表示最长允许多久不插图;max_distance_meters(最大距离阈值)表示机器人至少移动多远才需要插图;max_angle_radians(最大角度阈值)表示机器人至少旋转多大角度才需要插图。
如果当前帧满足"时间很近、移动很小、转角也很小",MotionFilter 就会认为当前帧和上次插图高度重复,于是过滤掉当前帧。
此时会发生的情况是:
扫描匹配成功
↓
得到当前 local_pose
↓
MotionFilter 认为运动不明显
↓
当前帧不插入 Submap
当前帧不生成 InsertionResult
当前帧不创建 Node但是,当前的 local_pose 仍然可以继续输出给上层定位模块、RViz 或控制模块使用。
所以要注意:
被 MotionFilter 过滤的帧,不是"定位失败帧",而是"定位结果存在,但不值得重复建图的帧"。
6.真正插入 ActiveSubmaps2D 后,才会产生 InsertionResult
若当前帧通过 MotionFilter,系统就会把当前点云插入 ActiveSubmaps2D(活动二维子地图集合)。
Cartographer 不会只维护一张无限扩大的大地图,而是把环境划分为多个 Submap(子地图)。旧 Submap 在积累足够多的点云后会完成并冻结,不再接收新观测;新的 Submap 则继续接收当前帧数据。
通常系统会同时维护两个 Active Submap,使相邻子地图之间存在重叠区域。例如当前帧可能同时插入:
Submap 5
Submap 6这样做的目的,是让相邻子地图共享一部分环境观测,后续 PoseGraph 才能更稳定地建立局部约束和全局约束。
当前帧写入 Submap 时,更新的并不是"原始点云文件",而是栅格地图中的占据概率。激光击中的位置会更新为 occupied cells(占据栅格,可能存在墙体、障碍物或货架);激光射线经过但没有击中的区域会更新为 free-space cells(空闲栅格,通常表示可通行空间)。
因此,Submap 保存的是环境的空间结构,而不是简单叠加一帧一帧的原始点云。
当当前帧真正插入 ActiveSubmaps2D 后,系统会生成 InsertionResult(插图结果)。它可以理解为:本次关键插图已经完成,当前帧具备进入后端的条件。
它通常包含两类核心数据:
InsertionResult {
constant_data; // 当前观测的长期保存数据
insertion_submaps; // 当前帧插入过哪些 Submap
}其中,constant_data(不可变观测数据)通常包含当前帧时间戳、局部位姿、重力方向信息、降采样后的点云等。它不是原始 LiDAR 消息的完整拷贝,而是后端进行回环检测、约束构建和全局优化真正需要保留的数据。
insertion_submaps(插入子地图集合)表示当前帧被写入了哪些子地图。例如:
insertion_submaps = {Submap 5, Submap 6}表示当前帧同时更新了第 5 张和第 6 张子地图。后端后续会根据这个关系,建立当前 Node 与这些 Submap 之间的局部约束。
7.PoseGraph::AddNode 才是 Node 正式创建的位置
Local SLAM 返回 MatchingResult 后,GlobalTrajectoryBuilder(全局轨迹构建器)会检查当前帧是否存在 insertion_result。
核心代码逻辑可以概括为:
matching_result =
local_trajectory_builder_->AddRangeData(...);
if (matching_result->insertion_result != nullptr) {
pose_graph_->AddNode(
matching_result->insertion_result->constant_data,
trajectory_id,
matching_result->insertion_result->insertion_submaps);
}local_trajectory_builder_(当前轨迹对应的 Local SLAM 前端对象)负责处理当前帧点云;matching_result(当前帧扫描匹配结果)保存前端输出。
下面这句最关键:
matching_result->insertion_result != nullptrnullptr(空指针)表示当前帧没有产生插图结果。也就是说,当前帧虽然可能完成了扫描匹配,但它没有真正插入 Submap,因此不能进入后端创建 Node。
只有 insertion_result 非空时,才会调用:
pose_graph_->AddNode(...)pose_graph_(PoseGraph 后端对象)负责维护 Node、Submap、局部约束、回环约束和全局优化关系。AddNode(...) 表示:将当前这一帧关键观测正式加入后端位姿图。
传入的三个主要参数分别是:
constant_dataconstant_data(当前节点的长期观测数据)包含当前帧时间、局部位姿、处理后的点云等信息,后续回环检测和约束构建会使用这些数据。
trajectory_idtrajectory_id(轨迹编号)表示当前 Node 属于哪一条轨迹。单机器人一次建图时通常只有一条轨迹;多机器人、多次建图或重新定位场景中,可能同时存在多条轨迹,因此需要编号区分。
insertion_submapsinsertion_submaps(当前节点插入过的子地图集合)表示该 Node 与哪些 Submap 存在直接观测关系。后端会根据这些关系建立 Node 与 Submap 之间的局部约束。
例如,Node 120 插入了 Submap 5 和 Submap 6,那么后端会记录:
Node 120 ↔ Submap 5
Node 120 ↔ Submap 6这些约束会参与后续 PoseGraph 优化。即使后面发生回环检测、地图整体被拉回或修正,Node 和 Submap 之间的局部关系仍然能够帮助系统保持地图局部结构的一致性。
8.Node 保存的是什么,和栅格地图有什么区别
Node 不是某个栅格,也不是一帧原始 LiDAR 点云的简单副本。
Node 更准确地说是:
机器人在某一个关键时刻,利用一帧有效观测完成局部定位并参与建图后,后端保存下来的一次关键局部观测记录。
一个 Node 通常会关联当前帧的时间戳、局部位姿、过滤后的点云、重力方向、所属轨迹编号以及插入的 Submap 信息。
而 Submap 保存的是环境结构,例如墙体、障碍物、走廊边界和空闲区域。
两者的区别可以这样理解:
Submap:
保存"环境长什么样"。
Node:
保存"机器人什么时候、在哪个位置、看到了什么"。当前帧通过 MotionFilter 后,插入 Submap 和创建 Node 通常发生在同一次有效插图事件中,但它们不是同一个对象。
当前帧有效点云
↓
插入 ActiveSubmaps2D
├── 更新栅格地图
└── 生成 InsertionResult
↓
PoseGraph::AddNode(...)
↓
创建 TrajectoryNode因此不能理解为"栅格地图里的点后来变成了 Node"。
更准确的说法是:
当前帧点云在插入 Submap 的同时,系统把这次有效观测对应的位姿、点云和子地图关系交给 PoseGraph,从而创建一个 Node。
9.原始帧、MatchingResult、InsertionResult 和 Node 的数量关系
正常情况下,数量关系可以写成:
原始 LiDAR 帧数量
≥ MatchingResult 数量
≥ InsertionResult 数量
= Node 生成数量原始 LiDAR 帧数量表示传感器实际发布了多少次点云。部分原始帧可能因为多雷达数据尚未凑齐、时间戳不合适、点云为空、系统初始化尚未完成等原因,没有形成有效的 MatchingResult。
MatchingResult 数量表示成功完成 Local SLAM 位姿估计的次数。即使某帧被 MotionFilter 过滤,通常仍然可以有 MatchingResult,因为系统已经完成了扫描匹配并得到了局部位姿。
InsertionResult 数量表示真正插入 ActiveSubmaps2D 的次数。MotionFilter 会过滤掉大量重复帧,因此它通常明显少于 MatchingResult 数量。
在标准链路中,只要生成一个 InsertionResult,后端就会调用一次 PoseGraph::AddNode(...),因此:
InsertionResult 数量 = Node 生成数量这里说的是"Node 的生成总数"。如果后续启用了 PoseGraph Trimmer(位姿图裁剪器),旧 Node 或旧 Submap 可能被裁剪,因此运行过程中当前仍保留的 Node 数量可能会小于历史生成总数。
例如,10 Hz LiDAR 连续运行 10 秒,理论上有约 100 帧原始点云;机器人前 3 秒静止,中间 5 秒持续前进并转弯,最后 2 秒静止,那么可能出现:
原始 LiDAR 帧:100
MatchingResult:95
InsertionResult:23
Node 生成数量:23没有成为Node的那些帧不是完全无用,它们仍然可以参与实时扫描匹配、帮助维持连续局部位姿;只是它们没有被长期写入 Submap 和 PoseGraph。
最后可以把这一部分总结成一句话:
Node 不是每一帧 LiDAR 的副本,而是当前帧经过 Local SLAM 位姿估计、通过 MotionFilter 筛选、成功写入 ActiveSubmaps2D 后,由 PoseGraph::AddNode(...) 创建的一次关键局部观测。
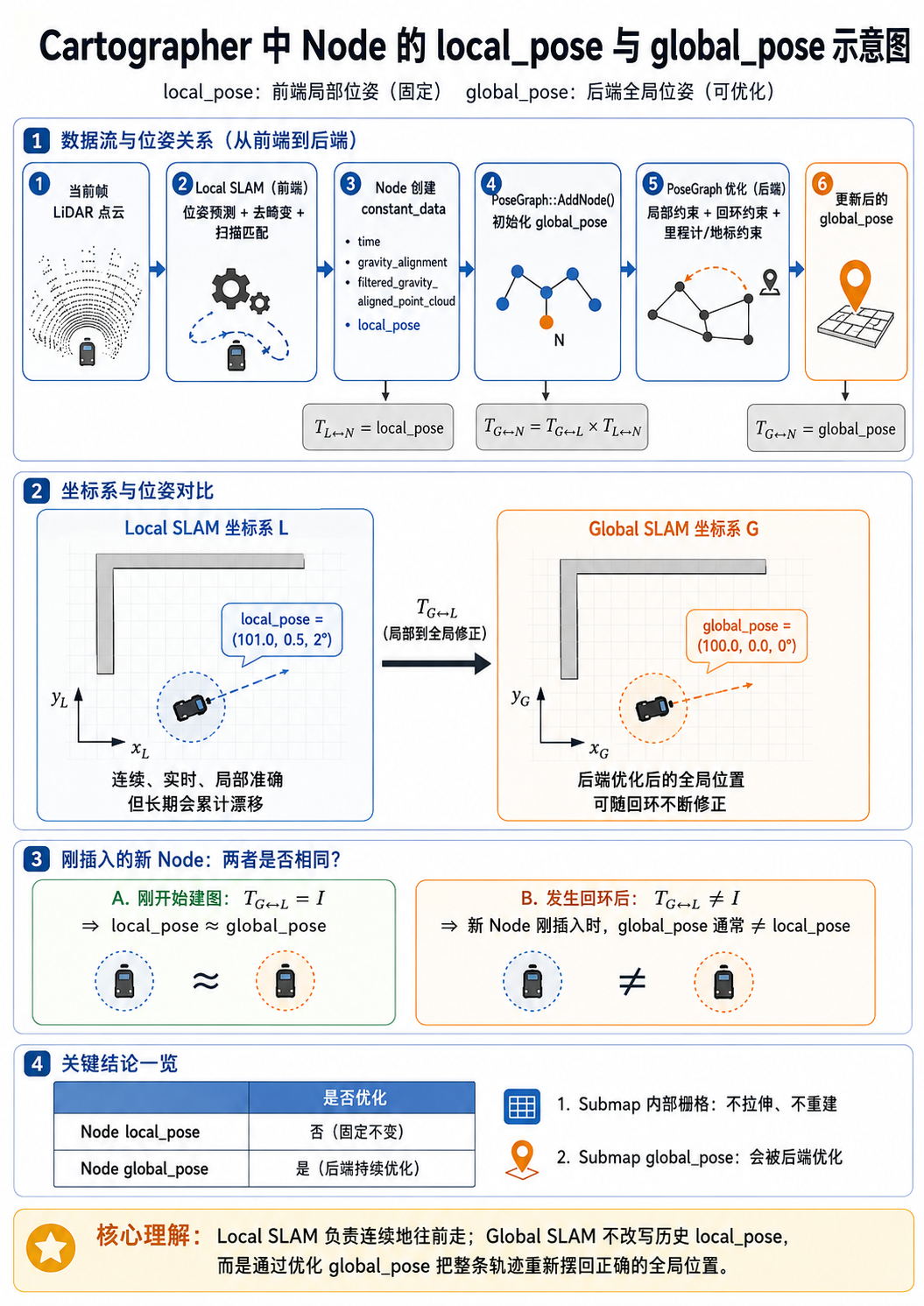
三、Node 的 local_pose 与 global_pose:刚插入时是否相同、局部漂移如何被后端修正
先把前面那句话修正得更准确:
constant_data里的local_pose,就是当前帧点云经过位姿预测、去畸变、实时扫描匹配后,前端最终得到的局部位姿;当前帧通过 MotionFilter(运动过滤器)并插入 ActiveSubmaps2D(活动子地图)后,这个匹配结果会被固定写入 Node。
所以,它不是单纯的 IMU / 轮速预测值,也不是原始 LiDAR 的位置,而是当前帧点云与活动 Submap 匹配后的 pose_estimate(前端估计位姿)。TrajectoryNode::Data 中保存的 local_pose 属于不可变观测数据;Node 外部的 global_pose 则表示它在 Global SLAM 全局地图中的位置,后续会被后端持续更新。
当前 Node 的两种位姿可以写成:
T_L←N = local_pose
T_G←N = global_pose其中,L(Local SLAM 坐标系)表示前端持续维护的局部坐标系,G(Global SLAM 坐标系)表示后端全局优化后的地图坐标系,N 表示当前 Node 所在的机器人观测时刻。T_A←B 的含义是:把 B 坐标系中的点转换到 A 坐标系。
两者之间的核心关系是:
T_G←N = T_G←L × T_L←N其中,T_L←N 是前端扫描匹配得到的 local_pose;T_G←L 是当前 Local SLAM 坐标系映射到 Global SLAM 坐标系的修正关系;两者相乘后得到 Node 的初始 global_pose。注意,T_G←L 更适合被理解成当前时刻的"局部轨迹到全局地图的校正关系",它不一定是一个永久不变、对所有历史 Node 都完全适用的固定变换。
1.刚插入的 Node,local_pose 和 global_pose 是否一样
不保证一样。 新 Node 刚进入 PoseGraph 时,源码会先计算:
optimized_pose =
GetLocalToGlobalTransform(trajectory_id) *
constant_data->local_pose;随后再用这个 optimized_pose 初始化 TrajectoryNode 的 global_pose。也就是说,新 Node 的全局位姿不是直接复制 local_pose,而是先经过当前的 Local-to-Global 修正。
因此,只有在下面这个条件成立时,两者数值上才相同:
T_G←L = II(单位变换)表示不平移、不旋转,也就是 Local SLAM 坐标系与 Global SLAM 坐标系完全重合。
这在刚启动建图时很常见。例如刚开始建图,还没有发生回环,也没有加载外部地图或初始位姿修正:
local_pose = (10.0 m, 2.0 m, 30°)
T_G←L = I
global_pose = (10.0 m, 2.0 m, 30°)此时可以近似认为:
local_pose = global_pose但这个"相同"不是因为两者本质上是同一个变量,而是因为当前没有全局修正,两个坐标系暂时重合。
2.发生过回环后,新 Node 一插入就可能不同
假设机器人已经走了很远,Local SLAM 因累计误差向前漂了 1 m。后端通过回环检测发现:机器人实际已经回到旧区域,因此已经把全局地图修正回来。
假设此时:
当前 Node 的局部位姿:
T_L←N = (101.0 m, 0.0 m, 0°)
当前 Local-to-Global 修正:
T_G←L = (-1.0 m, 0.0 m, 0°)由于这里没有旋转,计算可以简单理解为:
T_G←N = T_G←L × T_L←N
= (-1.0 m) × (101.0 m)
= (100.0 m, 0.0 m, 0°)因此,新 Node 刚创建时就是:
local_pose = (101.0 m, 0.0 m, 0°)
global_pose = (100.0 m, 0.0 m, 0°)这里的 local_pose 仍然保留前端一路累计出来的局部坐标;global_pose 则已经被映射到回环修正后的全局地图位置。
上面的示例只包含平移,所以看起来像直接减去 1 m。真实情况下若 T_G←L 同时包含平移和 yaw(航向角)修正,则必须进行刚体变换复合,不能简单地对 x、y、yaw 分别相加减。
3.local_pose 会越来越偏,后面的 Node 会不会越来越不准
从"相对于真实全局世界的位置"来看,确实可能越来越偏。因为 Local SLAM 的主要任务是保证短时间内的连续追踪,而不是不断和很久以前经过的区域做全局一致性校验。
例如机器人实际直行了 100 m:
真实世界位置:
Node 0 = (0.0 m, 0.0 m)
Node 500 = (100.0 m, 0.0 m)
Local SLAM 位姿:
Node 0 = (0.0 m, 0.0 m)
Node 500 = (101.0 m, 0.2 m)此时 Node 500 的 local_pose 相对于真实世界已经存在大约 1 m 的累计误差。
但这不代表 Node 500 的点云匹配一定已经很差。关键要区分两种准确性:
局部准确性:
当前 Node 相对附近 Node、当前 Active Submap、附近墙体的关系是否正确。
全局准确性:
当前 Node 相对真实起点、历史区域、整张全局地图的位置是否正确。Local SLAM 通常优先保证局部准确性。即使整条局部轨迹已经慢慢偏离真实世界,当前帧仍然可以较好地贴合正在构建的活动 Submap,因为这个 Submap 本身也是沿着同一条 Local SLAM 轨迹建立的。
可以理解成:机器人和附近墙体一起在局部坐标系中慢慢漂了。局部地图内部仍然连续,机器人相对最近墙体的位置也通常合理;但整张局部地图相对真实仓库坐标已经整体错位。
例如:
Node 499 local_pose = (100.8 m, 0.2 m)
Node 500 local_pose = (101.0 m, 0.2 m)
局部相对运动 = 0.2 m如果真实情况下两个 Node 之间也移动了约 0.2 m,那么前端局部运动估计仍然是正确的。问题在于前面几十米、几百米累计下来的微小误差不断叠加,使得它们相对全局真值偏了。
所以更准确的说法是:
local_pose不会在 Node 创建后继续变差,因为它已经冻结;但越晚创建的 Node,其local_pose相对真实全局环境的累计漂移可能越大。
4.为什么 Local SLAM 不直接把漂移修正回 local_pose
因为 local_pose 是前端实时扫描匹配产生的历史观测结果。它记录的是:"当时前端依据当前点云、预测位姿和活动 Submap,认为机器人位于哪里。"
如果后端一发现回环,就直接把所有 local_pose 改掉,会带来两个问题。
第一,Local SLAM 的连续性会被破坏。机器人控制、局部避障、实时路径跟踪等模块通常希望得到连续平滑的局部位姿;如果每次回环后前端坐标突然跳几米,控制模块会很难处理。
第二,后端优化不是重新运行前端扫描匹配。后端做的是:保留前端已经得到的局部观测和局部相对运动,再利用回环、里程计、地标等全局约束,重新安排这些 Node 和 Submap 在全局地图中的位置。
因此:
Node local_pose:
前端扫描匹配结果,固定保存,不直接优化。
Node global_pose:
后端全局图优化结果,可反复修改。
Submap 内部栅格:
固定,不重新插图、不拉伸、不扭曲。
Submap global_pose:
后端优化,可整体平移、旋转。Cartographer 的 2D 优化问题中,Node 的 global_pose_2d 和 Submap 的 global_pose 都会被作为 Ceres 优化变量;而 Node 的 local_pose_2d 作为前端局部观测保存下来,用来构建约束。
5.后端如何利用 local_pose 修正 global_pose
当前 Node 插入一个 Submap 时,前端已经知道该 Node 相对这个 Submap 的局部关系。设:
T_L←S:
Submap 在 Local SLAM 坐标系中的局部位姿。
T_L←N:
Node 的 local_pose。
Z_S←N:
前端测得的 Node 相对于 Submap 的局部约束。那么这个局部约束可以写成:
Z_S←N = (T_L←S)^-1 × T_L←N其中,(T_L←S)^-1 表示从 Local 坐标系转换回该 Submap 坐标系;相乘后就得到 Node 在 Submap 局部坐标系中的位置。
后端优化时,不再直接修改 Z_S←N,而是寻找一组新的全局 Node 位姿和全局 Submap 位姿,使它们在全局坐标下推算出来的相对关系,尽量符合前端观测:
(T_G←S)^-1 × T_G←N ≈ Z_S←N其中,T_G←S 是 Submap 的全局位姿,T_G←N 是 Node 的全局位姿。
这说明后端不是只拉 Node,也不是只拉 Submap,而是同时调整两者,使所有局部插图约束、回环约束、轮速里程计约束、连续 Local SLAM 约束尽量一致。
Cartographer 还会对连续 Node 加入基于局部位姿的相对约束:
Z_Ni←Nj =
(T_L←N_i)^-1 × T_L←N_j也就是前端认为 Node j 相对 Node i 发生了怎样的运动。若有轮速里程计,还会额外加入相邻 Node 之间的 Odometry 相对约束。这样即使回环要修正整条轨迹,后端也不会让相邻 Node 的局部关系随意散掉。
6.新 Node 刚进入后端后,还要经历两个阶段
新 Node 的 global_pose 不是一次确定、永远不变的,它至少有两个阶段。
第一阶段是"刚创建时的初始全局位姿":
global_pose_initial =
T_G←L(current) × local_pose这一步利用的是当前已经存在的 Local-to-Global 修正关系。若之前发生过回环,新 Node 会立刻继承这个修正,不会继续按旧的漂移坐标直接摆进全局地图。
第二阶段是"下一轮 PoseGraph 优化后的全局位姿"。当新 Node 对历史完成 Submap 的匹配成功,或者已有足够 Node 触发优化时,后端会综合新的约束重新求解。求解完成后,Node 的 global_pose 可能继续变化,Submap 的 global_pose 也可能同步变化。源码中,优化结束后会把求出的 global_pose_2d 写回每个 Node 的 global_pose,并把新的全局 Submap 位姿保存下来。
因此可以记成:
刚插入:
global_pose = 当前 Local-to-Global 修正 × local_pose
发生新的优化后:
global_pose = 所有约束共同优化后的结果7.一个完整例子:局部持续漂移,全局通过回环拉回
假设机器人从起点出发,绕仓库走一圈,最终回到起点附近。
开始时,Local 与 Global 坐标系重合:
T_G←L = I
Node 0:
local_pose = (0.0, 0.0, 0°)
global_pose = (0.0, 0.0, 0°)机器人持续行驶后,前端累计了一些漂移:
Node 500:
local_pose = (101.0, 0.5, 2°)
真实位置大约:
(100.0, 0.0, 0°)在尚未发现回环前,后端不知道 Local SLAM 已经漂了,因此当前可能仍然有:
global_pose ≈ local_pose当 Node 500 与历史 Submap 匹配成功后,系统发现:当前看到的墙体、门框、货架边缘,与起点区域高度一致。于是形成回环约束,PoseGraph 开始优化。
优化后,可能得到:
Node 500:
local_pose = (101.0, 0.5, 2°) // 不变
global_pose = (100.0, 0.0, 0°) // 被后端修正接着 Node 501 到来。假设它的前端局部位姿为:
Node 501:
local_pose = (101.2, 0.5, 2°)此时当前 T_G←L 已经带有回环修正,因此 Node 501 刚插入时就可能直接得到:
Node 501:
global_pose ≈ (100.2, 0.0, 0°)这就是后端修正的价值:前端 Local SLAM 可以继续保持连续运行;但从回环发生之后开始,新 Node 会立刻继承全局校正,不必重新从错误的全局位置继续累计。
8.2D Cartographer 中还要注意 gravity_alignment
虽然 2D Cartographer 最终重点优化的是 x、y、yaw,但 Node 中的 local_pose 和 global_pose 类型仍是 Rigid3d(三维刚体位姿)。这是因为实际机器人可能存在轻微 roll(横滚)和 pitch(俯仰),例如过门槛、经过坡道、底盘振动、LiDAR 安装角度误差等。
Cartographer 会使用 gravity_alignment(重力对齐旋转)先尽量消除 roll、pitch 对二维匹配的影响,再把位姿投影到二维平面进行优化。优化完成后,再把二维全局位姿和原始重力对齐信息组合回三维 global_pose。因此在平坦地面上,你可以主要把两种位姿理解为:
local_pose ≈ (x_L, y_L, yaw_L)
global_pose ≈ (x_G, y_G, yaw_G)但在源码层面,它们仍保留三维表达能力。
9.最后总结
Node 的 local_pose 和 global_pose 不是同一个东西。
local_pose:
当前帧点云经过前端扫描匹配后得到的局部位姿。
创建 Node 后固定不变。
保证局部连续性和实时性。
相对真实全局地图可能逐渐累计漂移。
global_pose:
当前 Node 在全局地图中的位姿。
刚插入时由 T_G←L × local_pose 初始化。
后续会随回环、里程计、地标、Node-Submap 约束等不断优化。刚启动且 T_G←L =I时,二者通常数值相同;一旦发生过回环或其他全局修正,新 Node 的 global_pose 就会先经过当前 Local-to-Global 修正,因此通常不再等于 local_pose。
最核心的一句话是:
Local SLAM 负责连续地"往前走",即使长期会整体漂移;Global SLAM 不改写这条局部历史,而是通过优化 Node 和 Submap 的全局位姿,把已经漂移的局部轨迹重新摆回正确的全局地图位置。
四、Node 和 Submap 之间不是一种关系,而是两种关系
Node 与 Submap 的关系分成两层,必须区分。
第一层:当前 Node 被插入当前 Active Submap。这是前端 Local SLAM 已知的局部关系,后端直接建立 INTRA_SUBMAP 约束。
第二层:当前 Node 或历史 Node 与某张历史完成 Submap 匹配成功。这是后端回环搜索得到的关系,后端建立 INTER_SUBMAP 约束。
可以压缩成:
当前 Node ↔ 当前 Active Submap
= INTRA_SUBMAP
= 前端插图关系
Node ↔ 历史 Finished Submap
= INTER_SUBMAP
= 后端回环匹配关系这两类关系的来源、计算方式、可信度和作用都不一样。
五、INTRA_SUBMAP:当前 Node 与当前 Submap 的局部约束
稳定运行时,ActiveSubmaps2D 通常维护两张活动 Submap:一张较旧、结构更成熟,用于当前 Scan-to-Map 匹配;一张较新、正在同步积累点云,准备未来接替旧图。
因此一个有效 Node 通常会被同时插入两张图:
Node k
├── old_submap
└── new_submap当前 Node 与这两张 Submap 的关系不需要重新做 Fast Correlative 或 Ceres 匹配,因为它已经由 Local SLAM 的插图过程确定。PoseGraph 直接利用 Node 和 Submap 在 Local SLAM 坐标系中的位姿计算相对变换:
Z_S←N = (T_L←S)⁻¹ × T_L←N其中:
T_L←S:
Submap 在 Local SLAM 坐标系中的局部位姿。
T_L←N:
Node 在 Local SLAM 坐标系中的 local_pose。
Z_S←N:
Node 相对于该 Submap 的局部测量位姿。例如 Submap 5 位于 Local SLAM 中的 [10 m, 2 m, 0°],当前 Node 31 位于 [14 m, 3 m, 15°],则 Node 31 相对 Submap 5 大致处于 [4 m, 1 m, 15°]。这个相对关系就是 INTRA_SUBMAP 约束的测量值。
源码中,PoseGraph2D 会将当前 Node 加入对应 Submap 的 node_ids 集合,再根据 Submap 局部位姿的逆变换与 Node local_pose 相乘,构造 INTRA_SUBMAP Constraint;其权重使用 matcher_translation_weight 与 matcher_rotation_weight。
INTRA_SUBMAP 的核心作用是维持局部结构。它告诉后端:"这个 Node 当时确实以这个相对位置插入了这张 Submap。"相邻 Node 通过共同连接同一 Submap 而保持局部连续;相邻 Submap 又通过共享 Node 保持彼此连续。
Node 20 ── Submap 4
Node 21 ── Submap 4、Submap 5
Node 22 ── Submap 4、Submap 5
Node 23 ── Submap 5这里并没有显式建立 "Submap 4 ↔ Submap 5" 的边,但 Node 21 和 Node 22 同时属于两张图,因此两张 Submap 已经通过共享 Node 被关联起来。
六、INTER_SUBMAP:回环约束到底是不是"新 Node 匹配旧 Submap"
是。最常见的回环流程就是:
新 Node
↓
匹配历史完成 Submap
↓
成功后建立 INTER_SUBMAP例如机器人早期经过仓库入口,建立了 Submap 0、Submap 1,并产生 Node 0 到 Node 30。之后机器人绕仓库运行一圈,当前生成 Node 180。若 Node 180 重新看到了入口处的柱子、墙面、门框和货架,那么后端会尝试把 Node 180 的过滤点云匹配到历史完成的 Submap 0 或 Submap 1 上。
如果匹配成功,就建立:
Node 180 ↔ Submap 0
INTER_SUBMAP这条约束的含义不是"Node 180 本来插入了 Submap 0",而是"当前环境与 Submap 0 的历史环境再次重合,因此当前 Node 应与这张旧图保持某个相对位姿关系"。
不过源码还有一个补充方向:当某张新的 Submap 刚刚完成时,PoseGraph 也会拿历史 Node 去匹配这张新完成图。也就是说,回环不仅是"新 Node 找旧图",还包括:
历史 Node
↓
匹配刚完成的新 Submap这样可避免时间顺序导致漏检。例如某批旧 Node 早期经过区域 A,但覆盖同一区域的新 Submap 很晚才建完;若只让新 Node 匹配旧图,旧 Node 永远不会再有机会匹配新图。PoseGraph2D 在 newly_finished_submap 为真时,会遍历历史 Node,并让不属于该 Submap 的 Node 尝试建立约束。
七、为什么回环只针对 Finished Submap
回环目标必须是完成并冻结的 Submap,而不是仍在持续插图的活动图。
活动 Submap 的 ProbabilityGrid 每一帧都可能发生变化:新的 hit 会增加占据概率,新的 miss 会清理自由空间,栅格范围也可能扩展。这样的地图结构不稳定,不适合作为后台长期匹配目标。
Finished Submap 则不同:它已经停止接收新的 range data,内部 ProbabilityGrid 固定。FastCorrelativeScanMatcher2D 可以为它建立多分辨率预计算栅格,并让后续多个 Node 反复复用同一个匹配器。
因此职责分工是:
Active Submap:
前端 Scan-to-Map 匹配
+
持续写入概率栅格。
Finished Submap:
后端 Node-to-Submap 回环匹配
+
长期约束构建
+
全局优化。PoseGraph2D 收集回环候选时,明确只取状态为 Finished 的 Submap;当一张旧图完成后,才会把它从"无约束搜索"状态转成可参与 Constraint Search 的 Finished 状态。
八、Submap 的 local_pose 与 global_pose:从创建、初始化到后端优化
Submap(子地图)和 Node 一样,也同时存在两套位置:一套来自 Local SLAM(前端局部建图),另一套来自 Global SLAM(后端 PoseGraph 全局优化)。
T_L←S:Submap 的 local_pose,表示该子地图在 Local SLAM 坐标系 L 中的位置。
T_G←S:Submap 的 global_pose,表示该子地图在 Global SLAM 坐标系 G 中的位置。
T_L←N:Node 的 local_pose。
T_G←N:Node 的 global_pose。其中,L 是前端连续维护的局部坐标系,短时间内连续稳定、但长期可能累计漂移;G 是后端优化后的全局坐标系,用于让所有 Node 和 Submap 在整张地图中保持一致。Local SLAM 的目标是持续构建局部一致的 Submap,Global SLAM 的目标则是把这些 Submap 和 Node 在全局范围内摆放一致。
1.Submap 的 local_pose 是怎么产生的
一帧 LiDAR 点云完成预测、去畸变和实时扫描匹配后,前端会得到当前雷达在 Local SLAM 坐标系中的位姿。当前帧点云也会被转换到 Local 坐标系,形成:
range_data_in_local:当前帧已经放入 Local SLAM 坐标系 L 的点云。
range_data_in_local.origin:当前帧 LiDAR 原点在 L 中的位置。当活动子地图数量不足,或者最新 Submap 已经插入足够多帧有效点云时,ActiveSubmaps2D 会创建新 Submap。标准 2D 在线建图链路中,新 Submap 的锚点来自当前帧的 LiDAR 原点:
AddSubmap(range_data_in_local.origin.head<2>());因此,新 Submap 的局部位姿可以概念性写成:
T_L←S_new = Translation(range_data_in_local.origin)例如,当前帧扫描匹配后,LiDAR 原点在 Local SLAM 中的位置为:
range_data_in_local.origin = (50.0 m, 12.0 m)那么新建的 Submap 可能具有:
T_L←S_new = (50.0 m, 12.0 m, 0°)这里的含义是:Submap 的局部参考原点被放在 Local SLAM 坐标系中的 (50.0, 12.0) 位置。
在标准 Cartographer 2D 在线建图实现中,Submap 创建函数接收的是当前位置 origin,其 local_pose 通常以平移形式保存,因此 Submap 坐标轴一般与 Local SLAM 坐标轴平行;它不是严格跟随机器人当时车头朝向旋转的一张"小地图纸"。后端计算时仍使用完整的二维刚体变换形式,以兼容全局优化产生的旋转修正。
2.Submap 自己的局部坐标系 S 是什么
每张 Submap 都可以看成有自己的参考坐标系 S。Submap 内部的墙体、栅格、障碍物、空闲区域,都是以这张局部地图为参考构建的。
p_L = T_L←S × p_S其中:
p_S:环境点在 Submap 坐标系中的位置。
p_L:同一个环境点在 Local SLAM 坐标系中的位置。
T_L←S:这张 Submap 在 Local SLAM 中的固定锚点。反过来,若当前点云已经在 Local SLAM 坐标系中,想知道它落在某张 Submap 内部的什么位置:
p_S = (T_L←S)^-1 × p_L例如:
T_L←S = (50.0 m, 12.0 m, 0°)
某个墙点在 Local SLAM 中:
p_L = (53.0 m, 14.0 m)则它相对这张 Submap 的位置为:
p_S = (3.0 m, 2.0 m)也就是说,这面墙在 Submap 自己的局部参考下,位于"向前 3 m、向左或向上 2 m"的位置。
但还要区分两个概念:
T_L←S:
PoseGraph 意义上的 Submap 局部锚点。
Grid2D / MapLimits:
Submap 内部栅格的分辨率、尺寸、单元格索引范围和栅格坐标转换规则。T_L←S 决定"这张子地图在 Local SLAM 中从哪里开始";MapLimits 决定"墙体最终写进哪一个栅格单元"。前者是位姿关系,后者是栅格存储结构,不能混为同一个变量。
3.Submap 的 local_pose 创建后会不会变
不会。
Submap 的 local_pose 属于前端历史结果。它表达的是:这张子地图刚创建时,Local SLAM 认为它应该锚定在哪里。
T_L←S:固定,不优化,不修改。但是 Submap 内部栅格在刚创建后并不会立即固定。它会继续接收后续有效点云,逐渐更新墙体、障碍物和空闲区域。Cartographer 通常同时维护两张 Active Submap,使相邻子地图拥有重叠区域;旧 Submap 最终完成后不再插图,内部栅格才彻底冻结。
所以要区分:
Submap local_pose:
创建时固定。
Submap 内部栅格:
Active 阶段持续更新;
Finished 后停止更新。4.Submap 的 global_pose 是怎么初始化的
Submap 的全局位姿是:
T_G←S它表示这张 Submap 在全局地图中的位置和朝向。这个位姿不是保存在 Submap2D 内部不断改写,而是由 PoseGraph / OptimizationProblem2D 单独保存和优化。
第一张 Submap 创建时,初始化逻辑可以理解为:
T_G←S0 = T_G←L × T_L←S0刚开始建图时,通常 Local 和 Global 坐标系重合:
T_G←L = I因此:
T_G←S0 = T_L←S0也就是第一张 Submap 的局部位姿和全局位姿数值上通常相同。
但后续新 Submap 的初始化,不是直接把 T_L←S_new 当作全局位姿,而是通过上一张已知 Submap 的全局位置进行推算。Cartographer 的实际代码逻辑可以抽象为:
T_G←S_new_initial = T_G←S_old × (T_L←S_old)^-1 × T_L←S_new源码中对应的核心形式是:
first_submap_pose *
ComputeSubmapPose(old_submap).inverse() *
ComputeSubmapPose(new_submap)也就是"旧 Submap 全局位姿 × 旧 Submap 局部位姿的逆 × 新 Submap 局部位姿"。
5.这条公式到底是什么意思
前面那句"先从旧 Submap 的全局位置回到 Local SLAM,再移动到新 Submap 的局部位置"只是便于理解的口头说法。严格从数学和代码角度说,真正发生的是:
先计算:新 Submap 相对于旧 Submap 的局部相对位姿。
再利用:旧 Submap 已优化后的全局位姿,把这个相对位姿映射到全局地图。公式从右往左看:
T_G←S_new = T_G←S_old × (T_L←S_old)^-1 × T_L←S_new其中:
T_L←S_new:
把新 Submap 坐标系中的点转换到 Local SLAM 坐标系 L。
(T_L←S_old)^-1:
把 Local SLAM 坐标系 L 中的点,转换到旧 Submap 坐标系 S_old。
(T_L←S_old)^-1 × T_L←S_new:
得到新 Submap 相对于旧 Submap 的局部位姿。
T_G←S_old:
把"相对于旧 Submap 的新 Submap 位姿"转换到全局坐标系 G。因此,中间这一段才是最关键的局部相对关系:
T_S_old←S_new = (T_L←S_old)^-1 × T_L←S_new最终:
T_G←S_new = T_G←S_old × T_S_old←S_new这和 Node 的新全局位姿初始化非常像:都是先保留前端局部关系,再乘上当前已经存在的全局修正。
6.完整数值例子:旧 Submap 如何带出新 Submap 的初始全局位姿
假设当前 Local SLAM 已经发生了累计漂移,而且后端已经通过回环优化修正过旧 Submap。
旧 Submap 在 Local SLAM 中的位置是:
T_L←S_old = (20.0 m, 5.0 m, 0°)新 Submap 在 Local SLAM 中的位置是:
T_L←S_new = (24.0 m, 5.0 m, 0°)这说明,在 Local SLAM 看来,新 Submap 比旧 Submap 向 x 正方向前进了 4 m。
但后端优化后,旧 Submap 在全局地图中的位置已经变成:
T_G←S_old = (18.0 m, 7.0 m, 90°)这里的 90° 很关键,表示旧 Submap 的局部 x 正方向,在全局地图中指向全局 y 正方向。
第一步,先求新 Submap 相对旧 Submap 的局部运动:
T_S_old←S_new = (T_L←S_old)^-1 × T_L←S_new = (4.0 m, 0.0 m, 0°)它表示:
从旧 Submap 坐标系出发,新 Submap 位于旧 Submap 的局部
x正方向 4 m 处。
第二步,将这个"局部前进 4 m"转换到全局地图:
T_G←S_new = T_G←S_old × T_S_old←S_new代入数值:
T_G←S_new = (18.0 m, 7.0 m, 90°) × (4.0 m, 0.0 m, 0°)由于旧 Submap 在全局中的 yaw 是 90°,它的局部 x 正方向已经旋转为全局 y 正方向,因此这 4 m 不会加到全局 x,而是加到全局 y:
T_G←S_new = (18.0 m, 11.0 m, 90°)最终结果是:
Local SLAM 中:
S_old = (20.0, 5.0, 0°)
S_new = (24.0, 5.0, 0°)
Global SLAM 中:
S_old = (18.0, 7.0, 90°)
S_new = (18.0, 11.0, 90°)这个例子说明:前端只知道新旧 Submap 在 Local SLAM 中相差 4 m;后端利用旧 Submap 已经被回环修正过的全局姿态,把这 4 m 放到正确的全局方向上。
也可以先计算当前 Local-to-Global 修正:
T_G←L = T_G←S_old × (T_L←S_old)^-1然后直接写成:
T_G←S_new = T_G←L × T_L←S_new两种计算方式完全等价。
7.Submap 与 Node 的局部约束怎么产生
当前 Node 插入某张 Submap 时,前端已经同时知道:
T_L←N:当前 Node 的 local_pose。
T_L←S:当前 Submap 的 local_pose。因此可以直接求出 Node 相对于 Submap 的局部观测关系:
Z_S←N = (T_L←S)^-1 × T_L←N其中,Z_S←N 表示:
当前 Node 在这张 Submap 坐标系中位于哪里、朝向哪里。
例如:
T_L←S = (50.0 m, 12.0 m, 0°)
T_L←N = (52.0 m, 13.0 m, 10°)则:
Z_S←N = (2.0 m, 1.0 m, 10°)这说明当前 Node 相对于这张 Submap,位于前方 2 m、侧向 1 m、朝向偏转 10° 的位置。
这个约束称为:
INTRA_SUBMAP 约束即 Node 与其实际插入的 Submap 之间的局部约束。Cartographer 在 Node 加入子地图时,正是利用 SubmapPose^-1 × local_pose_2d 构造该约束。
8.回环约束怎么作用到 Submap
当当前 Node 到达历史区域附近时,后端会让当前 Node 的过滤点云,与已经完成的历史 Submap 栅格地图做匹配。
若匹配成功,会建立:
INTER_SUBMAP 约束形式仍然是:
Z_S_old←N_new_loop但它的含义变成:
当前新 Node 与历史旧 Submap 匹配后,认为它相对旧 Submap 应该位于哪里。
例如 Local SLAM 认为机器人已经走到 (101 m, 0.3 m),但当前点云与起点附近 Submap 0 匹配后发现,它实际上应该靠近起点区域。这个匹配结果会作为回环约束加入 PoseGraph。
因此 Cartographer 图中的核心边通常是:
Submap ← Node而不是直接构造:
Submap A ← Submap B相邻 Submap 因为共享了一批 Node 而被连接;历史 Submap 与当前 Node 因为回环匹配而被连接。所有 Submap 之间的全局关系,最终通过这些 Node--Submap 约束间接形成。
9.后端如何优化 Submap 的 global_pose
后端不会优化:
T_L←S也不会修改 Submap 内部已经插入的栅格结构。
后端真正优化的是:
T_G←S即每张 Submap 在全局地图中的:
x_G、y_G、yaw_G同时,后端也优化所有 Node 的:
T_G←N因此优化变量可以写成:
X = {T_G←S_0, T_G←S_1, ..., T_G←S_m, T_G←N_0, T_G←N_1, ..., T_G←N_n}对于每条 Node--Submap 约束,优化器希望全局位姿推导出的相对关系,尽量等于前端或回环匹配得到的测量关系:
(T_G←S)^-1 × T_G←N ≈ Z_S←N对应残差可写成:
r_SN = Log(Z_S←N^-1 × (T_G←S)^-1 × T_G←N)当 r_SN 越小,说明当前优化后的 Node 和 Submap 全局摆放关系,越符合前端插图或回环匹配得到的局部测量。
Cartographer 2D 优化器会把每张 Submap 和每个 Node 的 (x, y, θ) 都作为 Ceres 参数块;第一张 Submap 通常被固定,避免整张地图在没有绝对参考时可以任意整体平移、旋转。优化问题中会加入 Intra-Submap 约束、回环 Inter-Submap 约束、相邻 Node 的 Local SLAM 相对约束、可用的里程计约束,以及地标或 Fixed Frame 约束。
概念上的总目标可以写成:
min Σ||r_intra||² + Σρ(||r_loop||²) + Σ||r_local_slam||² + Σ||r_odom||² + Σ||r_landmark/fixed_frame||²其中:
r_intra:Node 插入自身 Submap 时的局部约束误差。
r_loop:Node 与历史 Submap 回环匹配后的约束误差。
r_local_slam:连续 Node 之间的前端相对运动误差。
r_odom:轮速里程计相对运动误差。
r_landmark/fixed_frame:二维码、地标、GPS 或固定参考系约束误差。
ρ(...):回环约束使用的鲁棒损失,降低错误回环的破坏力。10.优化后,Submap 到底发生了什么变化
假设第 10 张 Submap 在 Local SLAM 中已经漂移:
T_L←S10 = (101.0 m, 0.3 m, 2°)回环前,它的全局初值可能也接近:
T_G←S10 ≈ (101.0 m, 0.3 m, 2°)当前 Node 与起点区域的历史 Submap 成功匹配后,PoseGraph 优化可能将其修正为:
T_G←S10 = (100.0 m, 0.0 m, 0°)变化过程可以概括为:
T_L←S10:不变。
Submap 10 内部栅格:不变。
Submap 10 的 global_pose:平移、旋转到新的全局位置。
相关 Node 的 global_pose:同步被优化。因此回环不是把 Submap 内部墙体拉弯、把栅格拉伸,或者重新运行所有历史点云插图;它是把整张 Submap 当成局部刚体地图块,重新放到更合理的全局位置。
优化器求解完成后,会将新的 global_pose 分别写回 Submap 和 Node;但 Node / Submap 的 Local SLAM 位姿仍保留原始前端结果。
11.Node 与 Submap 的四种位姿最终对比
Node local_pose:T_L←N
当前关键点云在 Local SLAM 中的位置。
前端扫描匹配得到,固定,不优化。
Node global_pose:T_G←N
当前关键观测在全局地图中的位置。
后端持续优化。
Submap local_pose:T_L←S
当前局部栅格地图在 Local SLAM 中的固定锚点。
创建时确定,固定,不优化。
Submap global_pose:T_G←S
当前局部栅格地图在全局地图中的摆放位置。
后端持续优化。最核心的两条公式是:
前端局部约束:Z_S←N = (T_L←S)^-1 × T_L←N
后端全局优化: (T_G←S)^-1 × T_G←N ≈ Z_S←N最后一句话总结:
Submap 的
local_pose来自创建时当前 LiDAR 在 Local SLAM 中的位置,用于固定这张局部地图的前端锚点;Submap 的global_pose则由 PoseGraph 根据 Node--Submap 局部约束、回环、里程计和地标等信息不断优化。后端不会重写 Submap 的局部历史和内部栅格,而是把整张 Submap 与相关 Node 一起重新摆放到一致的全局地图中。

九、回环匹配具体怎样做:筛选、粗搜索、精修
Node 并不会一加入 PoseGraph 就对所有历史 Submap 做暴力搜索。后端会先根据当前全局估计计算 Node 相对历史 Submap 的预测位置:
T_S←N_pred = (T_G←S)⁻¹ × T_G←N其中:
T_G←S:
历史 Submap 当前的全局位姿。
T_G←N:
当前 Node 当前的全局位姿。
T_S←N_pred:
按照当前全局估计推导出的 Node 相对历史 Submap 的预测位置。若预测距离已经超过 max_constraint_distance,ConstraintBuilder2D 会直接跳过该 Node-Submap 候选;之后还会使用每张 Submap 对应的采样器控制匹配任务数量。这样系统不会因为历史图越来越多而让后台任务无限堆积。
通过筛选后,回环任务进入后台线程池,流程是:
预测初始位姿
↓
FastCorrelativeScanMatcher2D
↓
得到离散粗匹配 score 与 pose_estimate
↓
score 是否达到阈值
↓
CeresScanMatcher2D
↓
得到连续精修后的匹配位姿
↓
生成 INTER_SUBMAP Constraint局部搜索使用 Match(...):当前系统已有一个大致可靠的初始位置,因此只在预测位姿附近的平移和角度窗口内搜索。
全局搜索使用 MatchFullSubmap(...):当前初始位置不可信,例如跨 Trajectory、全局重定位或尚未建立连接关系的情况,需要在整张 Submap 中搜索可能位置。ConstraintBuilder2D 分别提供 MaybeAddConstraint 和 MaybeAddGlobalConstraint 两条路径。
FastCorrelativeScanMatcher2D 的匹配对象是:
Node.filtered_gravity_aligned_point_cloud
↔
历史 Finished Submap 的 ProbabilityGrid它不是 Node 点云对历史 Node 点云。它寻找一个二维位姿 [t_x, t_y, θ],使当前 Node 点云经过变换后尽量落在历史 Submap 的高占据概率区域。
qᵢ = R(θ) × pᵢ + [tₓ, t_y]ᵀ其中:
pᵢ:
Node 过滤点云中的第 i 个点。
qᵢ:
经候选位姿变换后,落到历史 Submap 中的位置。
R(θ):
当前候选 yaw 对应的二维旋转。Fast Correlative 使用多分辨率预计算栅格和分支定界搜索,先排除明显低分区域,再细化有希望的候选区域。它解决的是"在较大范围中找到正确区域"的问题;CeresScanMatcher2D 则在粗匹配结果附近做连续优化,解决"亚栅格、连续角度精修"的问题。
十、构建约束到底有哪些:必须分成两层理解
这里要严格区分:源码中的 Constraint 对象类型 ,以及最终 Ceres 优化中加入的所有残差类型。
1. Constraint 对象只有两类
当前 PoseGraph 的 Constraint 标签只有:
INTRA_SUBMAP
INTER_SUBMAPINTRA_SUBMAP 是当前 Node 与当前插入 Submap 的局部插图关系。它直接来自 Local SLAM,数量多、关系稳定、用于维持局部地图骨架。
INTER_SUBMAP 是 Node 与历史完成 Submap 匹配成功后得到的跨 Submap 关系。它可能是同一 Trajectory 内的回环,也可能连接不同 Trajectory。INTER_SUBMAP 成功后,PoseGraph 还会更新 trajectory connectivity state,表示两条轨迹在空间上已经建立联系。
在 OptimizationProblem2D 中,INTRA_SUBMAP 和 INTER_SUBMAP 都会转成 Node-Submap 残差。但 INTER_SUBMAP 属于回环类约束,源码会对它使用 Huber Loss,降低偶发错误匹配对全局优化的破坏;INTRA_SUBMAP 则不使用该鲁棒核。
2. 除了 Node-Submap Constraint,优化器还会加入相邻 Node 的 Local SLAM 相对位姿残差
这个约束不是 Constraint::INTRA_SUBMAP,也不是 Constraint::INTER_SUBMAP,而是在 OptimizationProblem2D::Solve() 中直接加入相邻 Node 之间的残差。
对于连续的 Node i 和 Node i+1,系统从它们的 local_pose 计算相对位姿:
Z_local(i→i+1) =
(T_L←Nᵢ)⁻¹ × T_L←Nᵢ₊₁它表达的是:前端 Local SLAM 认为两个相邻 Node 之间发生了怎样的相对移动。
这个残差的意义是,即使某些 Node-Submap 关系或 Odom 数据不够强,后端仍保留相邻 Node 之间的连续性,避免整条轨迹被回环约束拉得过于松散或断裂。源码会对连续 node_index 的 Node 对加入该 Local SLAM 相对位姿残差,并使用 local_slam_pose_translation_weight 与 local_slam_pose_rotation_weight。
3. Odom 相对位姿残差
若 PoseGraph 收到 Odom 数据,OptimizationProblem2D 会在相邻 Node 之间插值出对应时刻的里程计相对运动,再添加 Node-Node 残差。
Z_odom(i→i+1)表示 Odom 认为 Node i 到 Node i+1 之间发生的相对位移和转角。
它的作用不是取代 LiDAR 回环,而是提供短时间运动连续性。比如走廊、重复货架、特征较少区域中,单纯依赖点云约束可能不够稳定;Odom 可以给后端一个"机器人在这段时间内大概怎样移动"的附加测量。
当前 2D 优化源码中,只要能计算出两 Node 之间的相对 Odom,就会添加对应残差,并使用 odometry_translation_weight 与 odometry_rotation_weight。
4. Fixed Frame Pose 残差
若系统输入了 FixedFramePoseData,例如外部定位系统、GNSS、UWB 或其他可转换为固定参考坐标系位姿的数据,OptimizationProblem2D 会将其作为 Node 与固定坐标系之间的残差。
它的作用是给整条 Trajectory 一个外部全局锚点。普通回环只能说明"当前区域和历史区域重合",但它不一定知道整个地图在真实世界坐标中的绝对方向和绝对位置;Fixed Frame Pose 则可以提供这类全局参考。
源码中会按 Node 时间插值固定坐标系测量,并用 fixed_frame_pose_translation_weight 与 fixed_frame_pose_rotation_weight 加入残差;还可以选择 tolerant loss,以降低偶发外部定位异常造成的影响。
5. Landmark 观测残差
若系统输入了 LandmarkData,例如二维码、AprilTag、人工标志点或其他具有稳定 ID 的定位标记,PoseGraph 会保存 LandmarkObservation。它记录 landmark 相对 tracking frame 的变换,以及平移和旋转权重。
优化时,系统会将 Landmark 也视为待估计或固定的全局变量:如果 Landmark 已知且被冻结,它相当于全局锚点;如果未知但被多次观测,系统会根据多个 Node 对它的观测共同估计 Landmark 的全局位置。
Landmark 残差的作用是把"机器人看到某个已知标志"转化成对全局轨迹的约束。对于你的二维码定位场景,只要上层把二维码观测转成 Cartographer 的 LandmarkData,而不是只在 Local SLAM 外部强行改位姿,它就可以以这种形式进入全局图优化。
6. IMU 在当前 2D 后端中的真实位置
这一点必须特别说明:当前 Cartographer master 的 OptimizationProblem2D 并不把 IMU 数据作为 2D 全局优化残差。
PoseGraph2D 可以接收 IMU 数据,但 OptimizationProblem2D::AddImuData() 的源码明确说明:IMU 数据在 2D optimization 中不使用,因此该部分接口被忽略。IMU 对 2D Cartographer 更重要的作用是在 Local SLAM 中提供重力对齐、姿态预测和点云处理支持,而不是作为单独的 2D PoseGraph 残差。3D Cartographer 的情况不同,不能混在一起理解。
因此,二维后端的完整约束体系可以压缩成:
显式 Node-Submap Constraint:
1. INTRA_SUBMAP
2. INTER_SUBMAP
OptimizationProblem2D 额外残差:
3. 相邻 Node 的 Local SLAM 相对位姿
4. 相邻 Node 的 Odom 相对位姿(有 Odom 时)
5. Fixed Frame Pose 残差(可选)
6. Landmark 观测残差(可选)
注意:
IMU 在当前 2D 后端优化中不构成独立残差。十一、所有约束最终如何作用于 Node 和 Submap
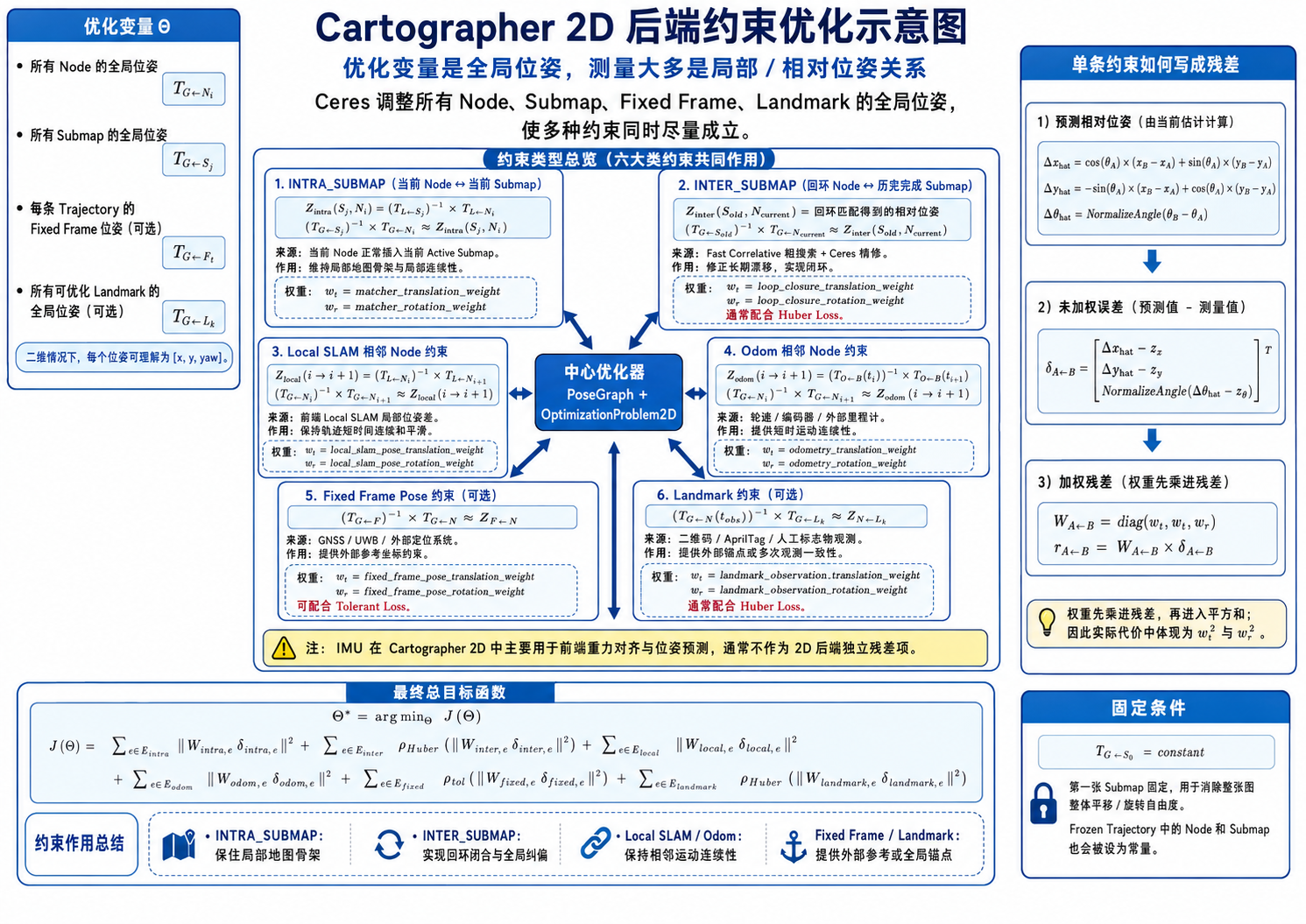
Cartographer 2D 后端最终优化的对象,是所有 Node 的全局位姿 T_G←N_i、所有 Submap 的全局位姿 T_G←S_j,以及可选的 Fixed Frame 位姿、Landmark 位姿。这里的"全局位姿"指对象最终在 map 坐标系中的 [x, y, yaw];但前端 Local SLAM、回环匹配、轮速里程计等提供的通常不是绝对全局坐标,而是"两个对象之间应该满足怎样的相对位姿关系"。因此,Ceres 做的事情不是给某个 Node 指定一个死的全局坐标,而是不断移动所有 Node、Submap 等全局变量,让全部相对测量尽量同时成立。
先约定符号:
T_G←N_i:第 i 个 Node 在全局 map 坐标系中的位姿
T_G←S_j:第 j 张 Submap 在全局 map 坐标系中的位姿
T_A←B:将 B 坐标系中的点变换到 A 坐标系
Z_A←B:测量得到的 B 相对于 A 的位姿对于任意一条从对象 A 到对象 B 的二维相对位姿约束,当前全局状态会先预测"B 相对于 A"的位置。设 A 的全局位姿是 [x_A, y_A, θ_A],B 的全局位姿是 [x_B, y_B, θ_B],则预测相对位姿为:
Δx_hat = cos(θ_A) × (x_B - x_A)
+ sin(θ_A) × (y_B - y_A)
Δy_hat = -sin(θ_A) × (x_B - x_A)
+ cos(θ_A) × (y_B - y_A)
Δθ_hat = NormalizeAngle(θ_B - θ_A)前两项表示先在全局坐标系中计算 B 与 A 的平移差,再旋转回 A 自身坐标系,因此得到的是"B 在 A 看来位于哪里";第三项表示两者的相对朝向。若测量值为 Z_A←B = [z_x, z_y, z_θ]^T,则未加权误差为:
δ_A←B =
[
Δx_hat - z_x,
Δy_hat - z_y,
NormalizeAngle(Δθ_hat - z_θ)
]^TCartographer 会为平移和旋转分别赋予权重。设平移权重为 w_t,旋转权重为 w_r,则权重矩阵和最终残差为:
W_A←B = diag(w_t, w_t, w_r)
r_A←B = W_A←B × δ_A←B因此单条普通约束的代价为:
||r_A←B||² =
w_t² × (Δx_hat - z_x)²
+ w_t² × (Δy_hat - z_y)²
+ w_r² × NormalizeAngle(Δθ_hat - z_θ)²这说明权重不会遗漏,它们已经被乘进残差内部。由于最终代价是残差平方和,因此平移权重变为原来的 10 倍时,对应平移误差的惩罚约会变为原来的 100 倍。SpaCostFunction2D 的核心就是按照这种"预测相对位姿-测量相对位姿-权重缩放"的逻辑计算残差。
1. INTRA_SUBMAP:Node 与当前插入 Submap 的局部约束
INTRA_SUBMAP 来自当前 Node 的正常插图过程。当前 Node 已经在 Local SLAM 中插入一张或两张 Active Submap,因此其相对位置无需再做回环搜索,直接由前端局部位姿计算。设 L 是 Local SLAM 坐标系,则当前插图时的测量关系为:
Z_intra(S_j, N_i) =
(T_L←S_j)^-1 × T_L←N_i进入全局优化后,Ceres 调整的是 Node 和 Submap 的全局位姿,但要求它们计算出的相对关系仍接近前端测量:
(T_G←S_j)^-1 × T_G←N_i≈Z_intra(S_j, N_i)这条约束的右侧是局部测量,左侧是全局变量导出的相对关系。INTRA_SUBMAP 的作用是维持局部地图骨架:即使回环发生后整段轨迹被重新调整,Node 也不应脱离它当初插入的 Submap。稳定双 Submap 阶段中,一个 Node 往往同时插入 old submap 与 new submap,因此通常会形成两条 INTRA_SUBMAP 约束;共享 Node 正是相邻 Submap 能够持续连接的原因。
其权重来自前端匹配配置:
w_t = matcher_translation_weight
w_r = matcher_rotation_weight2. INTER_SUBMAP:Node 与历史完成 Submap 的回环约束
INTER_SUBMAP 来自后端回环匹配。当前 Node 本来没有插入历史 Submap,但当前环境与历史环境重新重合,因此系统将当前 Node 的过滤点云与历史 Finished Submap 的 ProbabilityGrid 匹配。Fast Correlative Scan Matcher 先在较大范围中找候选位置,Ceres Scan Matcher 再做连续精修,最终得到:
Z_inter(S_old, N_current) =
当前 Node 相对于历史 Submap 的匹配位姿进入全局优化后,约束形式仍与 INTRA 相同:
(T_G←S_old)^-1 × T_G←N_current≈Z_inter(S_old, N_current)二者唯一的本质区别是测量来源。INTRA 表示"当前 Node 当初就是这样插入当前 Submap 的";INTER 表示"当前 Node 虽然不是插入这张历史 Submap 的,但扫描匹配证明它们对应同一片环境"。因此,INTER_SUBMAP 负责修正长期漂移,把当前区域和历史区域重新闭合。
其权重是:
w_t = loop_closure_translation_weight
w_r = loop_closure_rotation_weightINTER_SUBMAP 通常还会使用 Huber 鲁棒核。因为回环可能受重复货架、相似走廊、重复柱子影响,少数约束可能不可靠;Huber Loss 会削弱大残差回环的影响,避免一条错误回环把整张地图强行拉坏。
3. 相邻 Node 的 Local SLAM 相对位姿约束
除了 Node-Submap Constraint,OptimizationProblem2D 还会直接在同一 Trajectory 中的连续 Node 之间加入 Local SLAM 相对位姿残差。它不属于 INTRA_SUBMAP 或 INTER_SUBMAP,而是后端为保持轨迹连续性额外加入的 Node-Node 约束。
前端 Local SLAM 给出的相对运动为:
Z_local(i→i+1) =
(T_L←N_i)^-1 × T_L←N_(i+1)全局优化要求:
(T_G←N_i)^-1 × T_G←N_(i+1)
≈
Z_local(i→i+1)这条约束可以理解为:"回环允许长期轨迹整体重新排布,但不能破坏相邻 Node 之间前端已经确定的短时间运动关系。"例如 Node 10 和 Node 11 原本只相距 0.2 m,优化后不应被拉开成数米;原本连续转弯的轨迹,也不应被优化成明显折线。
其权重为:
w_t = local_slam_pose_translation_weight
w_r = local_slam_pose_rotation_weight4. 相邻 Node 的 Odom 相对位姿约束
Odom 约束也是 Node-Node 相对约束。系统在两个 Node 的时间戳处,从轮速、编码器、视觉里程计或外部 Odom 队列中插值得到机器人位姿,再计算对应的相对运动。忽略重力对齐和二维投影细节,可先写成:
Z_odom(i→i+1) =
(T_O←B(t_i))^-1 × T_O←B(t_(i+1))其中 O 是 odom 坐标系,B 是机器人 tracking/body 坐标系。经过重力对齐并投影到二维后,最终优化关系为:
(T_G←N_i)^-1 × T_G←N_(i+1)
≈
Z_odom(i→i+1)Odom 约束不提供绝对位置,它只说"机器人从 Node i 到 Node i+1 应该如何移动"。它和 Local SLAM 相邻约束同时存在:Local SLAM 基于激光点云匹配给出相对运动;Odom 基于轮速或外部里程计给出另一份相对运动;优化器根据权重决定两者的综合影响。
其权重为:
w_t = odometry_translation_weight
w_r = odometry_rotation_weight5. Fixed Frame Pose:外部固定参考系约束
Fixed Frame Pose 用于接入 GNSS、UWB、外部定位系统等信息。设外部参考坐标系是 F,外部系统测得的 Node 相对该参考系位姿为 Z_F←N,则约束为:
(T_G←F)^-1 × T_G←N
≈
Z_F←N这里 T_G←F 表示外部参考坐标系在 map 中的位姿,T_G←N 表示 Node 的全局位姿。Fixed Frame 的意义是让轨迹尽量符合外部定位系统,但在当前二维优化中,T_G←F 本身也可以参与优化,因此它不一定天然就是绝对世界原点。是否能提供真正绝对锚点,取决于外部参考系是否具有可信、固定的真实世界定义。
其权重为:
w_t = fixed_frame_pose_translation_weight
w_r = fixed_frame_pose_rotation_weight对于可能跳变的 GNSS、UWB 或外部定位,Cartographer 可使用 Tolerant Loss,降低异常测量的拉扯作用。
6. Landmark:二维码、AprilTag 等标志物约束
Landmark 是带稳定 ID 的环境实体,例如二维码、AprilTag、人工标志物。设 Landmark k 的全局位姿为 T_G←L_k,机器人在观测时刻 t_obs 测得 Landmark 相对于机器人坐标系的观测为 Z_N←L_k,则理想关系为:
(T_G←N(t_obs))^-1 × T_G←L_k
≈
Z_N←L_k二维码或 AprilTag 的观测时间不一定恰好等于某个 Node 的时间,因此源码会使用观测时刻前后的两个 Node,对机器人位姿进行插值,得到 T_G←N(t_obs)。
若 Landmark 没有已知全局坐标,它自身也是优化变量,多次观测会共同确定 Landmark 与轨迹的位置;若 Landmark 被标记为 frozen,其全局位姿固定,便会成为真正的外部绝对锚点。Landmark 的平移、旋转可信度由每次观测自身携带:
w_t = landmark_observation.translation_weight
w_r = landmark_observation.rotation_weightLandmark 残差通常也是鲁棒处理的,因为错误识别二维码、误关联 AprilTag 或观测噪声都可能引入异常。
7. IMU 在二维后端中的位置
当前 Cartographer 2D 的 OptimizationProblem2D 不会将 IMU 直接作为独立 Ceres 残差加入总目标函数。IMU 的主要作用在 Local SLAM 前端:提供重力对齐、姿态预测、点云去畸变和更稳定的局部位姿。因此,IMU 会间接影响 Node 的 local_pose、gravity_alignment 以及 Odom 数据如何投影到二维,但不会单独成为二维 PoseGraph 中的一项残差。
因此二维后端最终约束体系应理解为:
Node-Submap 约束
+
相邻 Node 的 Local SLAM 约束
+
相邻 Node 的 Odom 约束
+
Fixed Frame Pose 约束(可选)
+
Landmark 观测约束(可选)最终带权重的总目标函数
将所有待优化变量写为:
Θ =
{
所有 Node 的 T_G←N_i,
所有 Submap 的 T_G←S_j,
每条 Trajectory 的 T_G←F_t,
所有可优化 Landmark 的 T_G←L_k
}最终要求解的是:
Θ* = argmin_Θ J(Θ)完整总目标函数可以写为:
J(Θ) =
Σ_(e∈E_intra)
|| W_intra,e × δ_intra,e ||²
+ Σ_(e∈E_inter)
ρ_Huber(
|| W_inter,e × δ_inter,e ||²
)
+ Σ_(e∈E_local)
|| W_local,e × δ_local,e ||²
+ Σ_(e∈E_odom)
|| W_odom,e × δ_odom,e ||²
+ Σ_(e∈E_fixed)
ρ_tol(
|| W_fixed,e × δ_fixed,e ||²
)
+ Σ_(e∈E_landmark)
ρ_Huber(
|| W_landmark,e × δ_landmark,e ||²
)这里换行只是为了避免公式框横向滚动,公式本身仍是一整个目标函数。E_intra 是局部插图约束集合;E_inter 是回环约束集合;E_local 是相邻 Node 的 Local SLAM 相对运动集合;E_odom 是 Odom 相对运动集合;E_fixed 是外部固定参考集合;E_landmark 是二维码、AprilTag 等 Landmark 观测集合。
对于前五类二维位姿约束,其权重矩阵通常都是:
W = diag(w_t, w_t, w_r)两个 w_t 分别缩放 x、y 平移误差,w_r 缩放 yaw 误差。Landmark 内部通常保留更完整的三维观测,因此会按自身平移、旋转权重缩放对应残差。
总目标函数中,INTRA、Local SLAM、Odom 默认直接使用平方误差;INTER 回环与 Landmark 常使用 ρ_Huber;Fixed Frame 可按配置使用 ρ_tol。这些鲁棒核不是取消某一条约束,而是当某条约束残差异常大时,降低它继续增大的速度,让优化器不会被一条错误回环、错误二维码或异常 UWB 定位强行带偏。
Huber Loss 可概念化理解为:
ρ_Huber(s) = s,
当 s ≤ δ² 时
ρ_Huber(s) = 2δ√s - δ²,
当 s > δ² 时
其中:s = || W × δ ||²最后,Cartographer 还会固定第一张 Submap:
T_G←S_0 = constant它不是一条带权重的残差,而是一个固定条件。因为若所有 Node 和 Submap 都可以自由移动,则整张地图一起平移、一起旋转后,所有相对约束仍不变,优化器无法确定 map 原点。固定第一张 Submap 的意义就是消除这种整体自由度;Frozen Trajectory 中的 Node 和 Submap 同样会被设为常量,不再参与后续优化。
总结
Cartographer 的 Global SLAM 后端并不是把每帧激光点云简单拼到一张越来越大的地图上,而是把 Local SLAM 前端产生的有效观测组织成一套可优化的空间关系系统。这个系统最上层是 Trajectory,它代表一次独立 SLAM 运行实例;Trajectory 内部持续产生 Node 和 Submap;Node 保存某一时刻被后端正式采用的局部观测;Submap 保存一段时间内逐步积累出来的局部概率地图;Constraint 则记录 Node 与 Submap、Node 与 Node、Node 与外部参考之间应满足的相对关系。
Node 不是原始 LiDAR 帧。原始点云先经过 Local SLAM 的去畸变、位姿预测和扫描匹配,得到 MatchingResult;随后还要经过 MotionFilter 判断,只有当前点云真正插入 ActiveSubmaps2D,产生 InsertionResult 后,GlobalTrajectoryBuilder 才会调用 PoseGraph2D::AddNode。这个机制决定了 Node 是经过前端筛选后的关键观测,而不是高频重复传感器数据的简单复制。这样既能降低后端回环与优化负担,也能保证进入 PoseGraph 的观测具有足够空间变化和局部地图价值。
Node 内部保存的内容也远不止一个 x、y、yaw。它包含时间戳、重力对齐旋转、过滤后的重力对齐点云、Local SLAM 位姿以及可被后端优化更新的 global_pose。其中最关键的是 filtered_gravity_aligned_point_cloud,因为二维回环匹配真正使用的就是这份点云。它保留当前环境中墙体、柱子、货架、门框、通道边缘等主要几何结构,并移除过密、重复或不必要的点。Node 的 local_pose 表示前端 Local SLAM 认为机器人在哪里,强调连续性和实时性;global_pose 则表示后端 PoseGraph 优化后机器人应该在哪里,强调长期全局一致性。回环发生时,主要被修正的是 global_pose 以及 Local-to-Global 变换,而不是前端原始 local_pose。
Node 与 Submap 之间有两种本质不同的关系。第一种是 INTRA_SUBMAP 约束,它来自当前 Node 插入当前 Active Submap 的过程。当前 Node 本来就是在前端扫描匹配得到的位姿下写入这张图的,因此后端不需要重新匹配,只需根据 Node 和 Submap 在 Local SLAM 坐标系中的局部位姿,直接计算 Node 相对于 Submap 的变换。INTRA_SUBMAP 的作用是维持局部骨架:同一张 Submap 中的多个 Node 通过它保持相对一致;相邻 Submap 又通过共享 Node 保持连续。它解决的是局部地图不散、局部轨迹不裂的问题。
第二种是 INTER_SUBMAP 约束,它来自回环或跨区域匹配。最常见的形式确实是"新 Node 匹配旧的完成 Submap"。机器人绕场一圈后重新回到历史区域,当前 Node 的过滤点云会尝试与历史 Finished Submap 的 ProbabilityGrid 对齐。若墙、柱子、货架等结构重合,FastCorrelativeScanMatcher2D 会先在大范围或局部窗口中找到高分候选,CeresScanMatcher2D 再在该候选附近做连续精修,最终得到 Node 相对于历史 Submap 的精确变换。这个变换被包装成 INTER_SUBMAP Constraint,成为后端修正长期累计漂移的关键信息。除了新 Node 匹配旧图,源码还支持旧 Node 匹配刚完成的新 Submap,从而避免由于地图完成时间不同而漏掉回环。
从源码角度看,PoseGraph 中显式保存的 Constraint 对象只有 INTRA_SUBMAP 和 INTER_SUBMAP 两类。但最终的 OptimizationProblem2D 并不只依赖这两类 Node-Submap 关系。它还会加入相邻 Node 之间的 Local SLAM 相对位姿残差,保证前端连续运动关系不会被破坏;若有轮速里程计,则加入相邻 Node 的 Odom 相对位姿残差;若输入 FixedFramePoseData,则加入外部固定坐标系约束;若输入 LandmarkData,例如二维码、AprilTag 或其他标志点观测,则加入 Landmark 观测残差。这些约束共同构成完整的全局优化问题。需要特别注意的是,当前 Cartographer 2D 的 OptimizationProblem2D 不把 IMU 当作独立后端优化残差;IMU 在二维系统中主要服务于前端重力对齐和位姿预测。
最终,Cartographer 不是"用回环直接把机器人拉回原点",而是把回环变成一条新的空间事实:某个 Node 相对于某张历史 Submap 应该处于某个位置。优化器随后同时调整大量 Node 和 Submap 的 global pose,使 INTRA_SUBMAP、INTER_SUBMAP、Odom、Local SLAM 相邻约束、Landmark 和外部坐标系约束尽可能同时成立。于是局部地图内部结构得以保留,长期积累的漂移被逐步分摊到整条轨迹上,最终形成首尾闭合、全局一致的地图。